多級液壓天線舉升機構運動平穩性檢測系統
2021-01-07 10:16:14
西華大學學報(自然科學版) 2021年1期
(中國電子科技集團公司第三十八研究所,安徽 合肥 230088)
液壓天線舉升系統是將天線陣面舉升到一定高度,且對天線陣面的仰角有一定要求。負載變化較大且對運動速度平穩性要求較高的液壓天線舉升系統,往往采用調速閥對液壓缸進行速度控制[1]。特別是對多級液壓缸,為了保證速度運動的平穩,調速閥控制的每一級流量都是變化的。為了實現天線液壓舉升系統運動的均勻,通常需要額外系統來檢測多級液壓缸運動的平穩性。除肉眼定性的判斷外,定量判斷則需要安裝專用的檢測舉升機構速度、振動等信息的裝置和儀器。多級液壓天線舉升機構運動過程中,油缸除缸桿伸出外,還伴隨著油缸鉸鏈轉動,這給專用檢測裝置和儀器的安裝帶來了不小的困難。
為了提高檢測裝置及方法的通用性,本文提出了一種檢測方法。在該檢測方法中檢測裝置不僅通用性好、便于安裝,特別適用于大型多級液壓天線舉升機構,而且能有效地判斷出多級液壓天線舉升機構運動過程中的速度變化,識別天線舉升機構運動的平穩性差異。
1 多級液壓天線舉升機構
多級液壓天線舉升機構的組成如圖1 所示,包括基座1、舉升油缸2、天線負載3、轉軸5、6、7。其中:基座1 固定在安裝平臺上;基座1 與舉升油缸2 一端通過轉軸6 活動連接;舉升油缸2 一端與天線負載3 通過轉軸7 活動連接;天線負載3 與基座1 通過轉軸5 活動連接。其機構運動規律是通過舉升油缸2 將天線負載3 圍繞其轉軸5 舉升到一定高度,且對舉升后的天線負載3 平行面與基座1 水平面夾角有一定要求。S1、S2分別表示天線負載3 的起始位置與終點位置[2]。
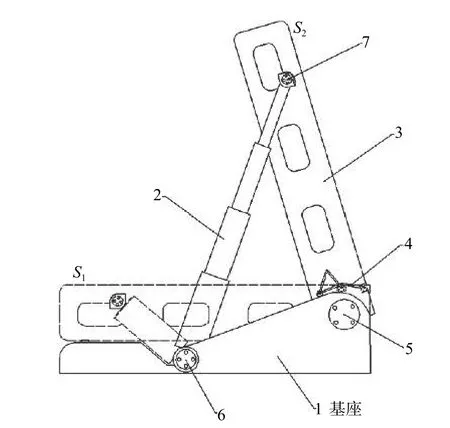
圖1 多級液壓天線舉升機構簡圖
對于本文所討論的多級液壓天線舉升機構運動平穩性,實際上指的是通過舉升油缸2 將天線負載由初始位置S1運動至終點位置S2的過程中其自身運動速度的均勻性。舉升油缸是三級油缸,每級缸桿的直徑是變化的:當天線負載由S1運動至S2時,舉升油缸的缸桿直徑變化趨勢是由大變小;當天線負載由S2運動至S1時,舉升油缸的缸桿直徑變化趨勢是由小變大。由于缸桿直徑的變化,每一級油缸的流量也是變化的。本文使用電控液壓調速閥實現對液壓缸流量的控制。舉升油缸2 在伸出或收回的過程中,兩端是通過轉軸6 和7 一起進行轉動,從相對運動來說,實現了天線負載3 圍繞轉軸5 的轉動。舉升油缸2 自身不僅有缸桿的直線運動,還包含了舉升油缸自身的轉動。
通過調速閥對舉升油缸的直線運動速度進行控制,從而實現天線負載的勻速轉動。從舉升機構運動分析可知,為了精確實現天線負載的勻速運動及檢測運動過程中是否平穩,就必須安裝相關的專用檢測設備以得到具體的量化數據和指標。目前,市場上現有的檢測方法通常是將拉線位移傳感器等類似的裝置安裝在油缸行程的兩端,通過計算運動長度與時間的比值來確定油缸的運行速度。這種裝置安裝和使用方式受油缸的長度和長期運行的環境因素影響較大。特別對于油缸運動過程中是否平穩需要進行檢測而言,對這類傳感器的實時運動的精度要求很高,甚至還要結合檢測油缸流量和振動等信息的裝置來配合定量判斷。為此,本文提出了一種用于多級液壓天線舉升機構的平穩性檢測系統,它不僅檢測裝置能方便安裝,而且檢測系統能準確地量化舉升機構運動的平穩性。
2 平穩性檢測系統
2.1 基于四連桿原理的檢測裝置
實際應用中多級液壓天線舉升機構往往結構尺寸比較大。為了方便安裝,本文基于四連桿的原理[3-9]設計了平穩性檢測裝置,其結構圖如圖2 所示。
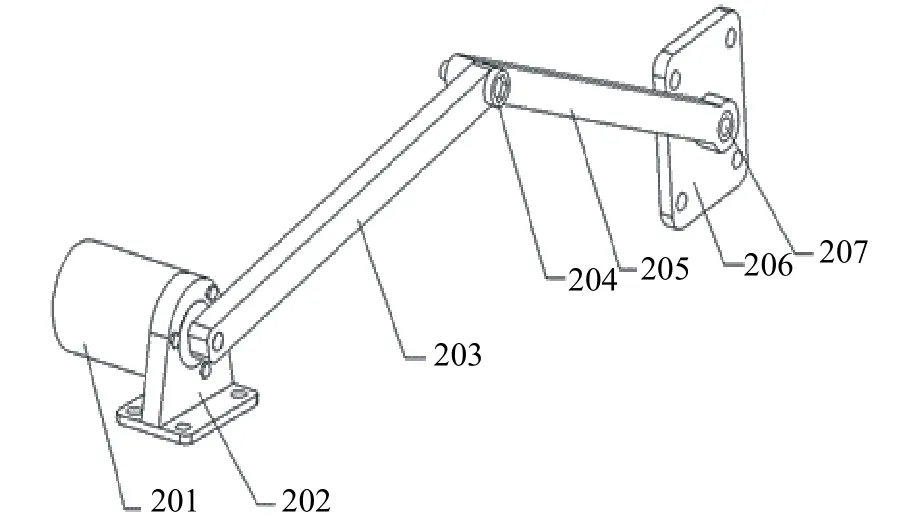
圖2 基于四連桿原理的檢測裝置結構圖
檢測裝置由2 根連桿203、205,2 根轉軸204、207,編碼器安裝支架202,安裝板206,絕對式編碼器201 組成。安裝板和編碼器安裝支架分別固定在被檢測的舉升天線負載和其天線基座上;天線負載的運動帶動絕對式編碼器的轉動,其輸出信號即為天線舉升機構實際的運動脈沖數值。圖3是檢測裝置安裝在天線舉升機構上的安裝尺寸示意圖,其結構參數包括轉軸5 與轉軸207 中心距L1,轉軸207 與轉軸204 中心距L2,轉軸204 與絕對式編碼器中心距L3,絕對式編碼器與轉軸5 中心距L4,共4 組長度尺寸。由于安裝板和編碼器安裝支架分別固定在天線負載和支座上,因此其桿件的運動規律可以等效為雙搖桿機構運動。對應上述的4 個長度尺寸,L4等效的桿件為靜桿,L1和L3等效的桿件為搖桿,做往返擺動運動,L2等效的桿件為連桿,做平面運動。
2.2 平穩性檢測系統
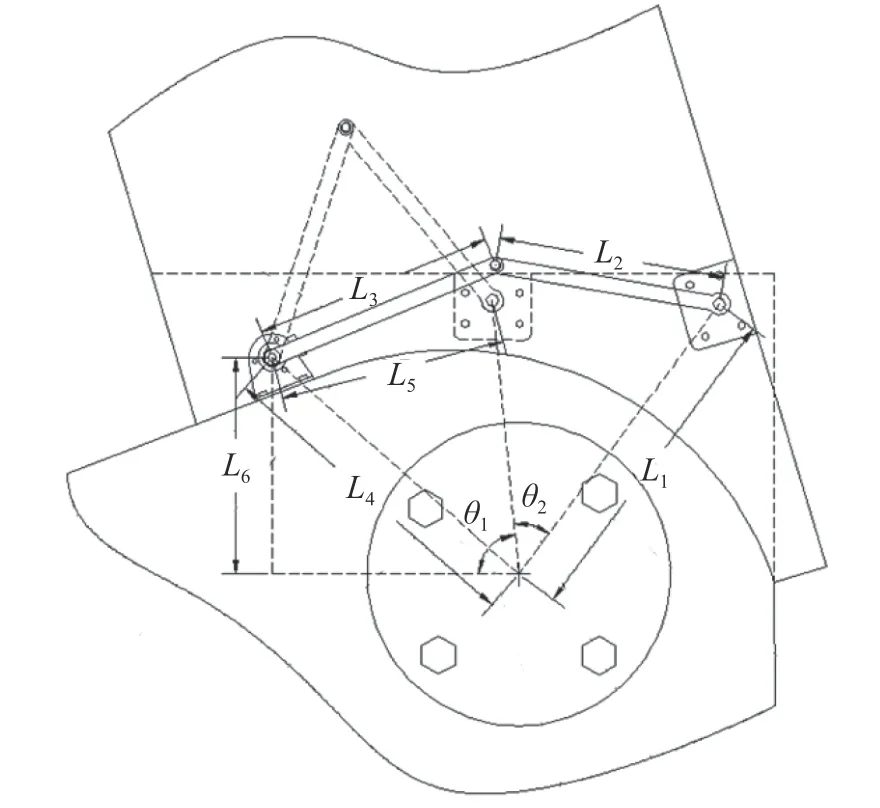
圖3 檢測裝置結構安裝尺寸圖
在檢測裝置中,絕對式編碼器是連接舉升機構與檢測系統之間的媒介。絕對式編碼器輸出數值由其自身轉軸的機械位置所決定[10-11]。絕對式編碼器轉軸的每個機械位置是唯一的。在轉動中測量光電碼盤各道刻線,以獲取其唯一的編碼,再通過同步串行輸出編碼器轉軸位置脈沖。本文設計的平穩性檢測系統連接框圖,如圖4 所示。

圖4 檢測系統連接框圖
從圖4 可知,檢測裝置采集相關的運動數據,數據采集處理系統對采集到的數據進行處理,并對處理后的數據進行分析,得出舉升機構的平穩性差異。檢測系統內部結構圖,如圖5所示。
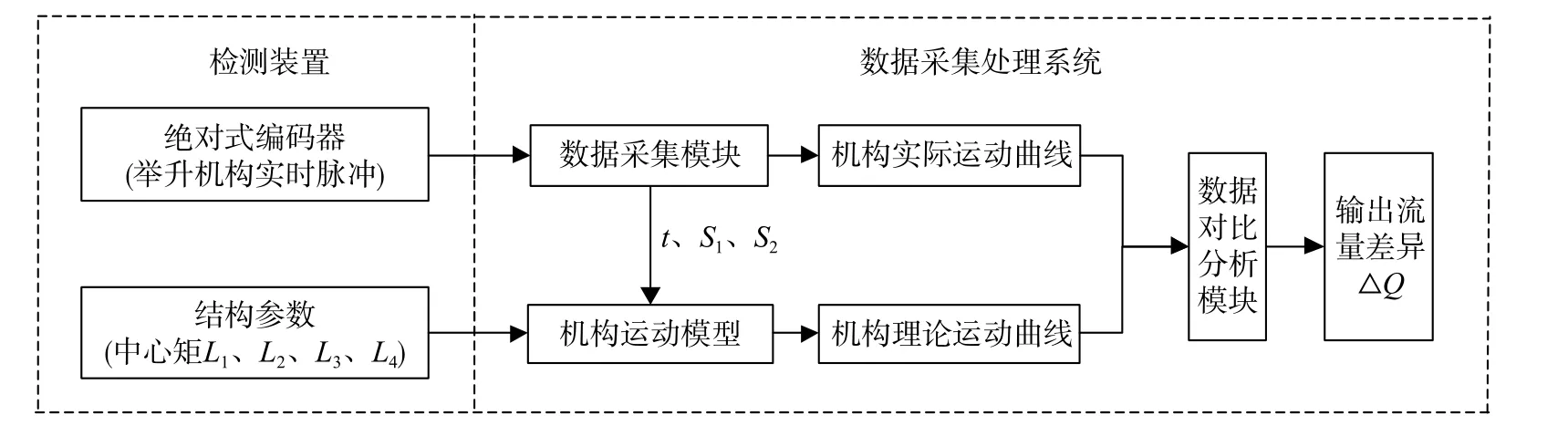
圖5 檢測系統內部結構圖
檢測裝置除了向數據采集處理系統輸入采集到的絕對式編碼器的實時脈沖之外,還需要提供舉升機構的初始化參數,如圖3 所示,包括:中心距L1、L2、L3、L4;機構處于起點S1時轉軸204 與轉軸207 中心距L5;絕對式編碼器轉軸與轉軸5 在水平方向上的垂直距離L6;機構處于終點S2時天線負載與水平面的夾角θ2,該夾角θ2簡化為天線仰角θ2,通常來說,天線負載的仰角是已知的,或者說可以通過簡單的儀器測量出來。
數據采集模塊在天線負載從起點S1實際運動至終點S2過程中,以采樣周期T讀取絕對式編碼器的反饋脈沖數值,運動過程的總時間記為采樣時間t。以運動起點S1為原點建立oxy坐標系,其中橫坐標為采樣時間、縱坐標為讀取的脈沖數值,擬合出天線舉升機構實際運動曲線。起點S1是指天線負載運動起始時的狀態;終點S2是指舉升天線負載運動終止時的狀態。
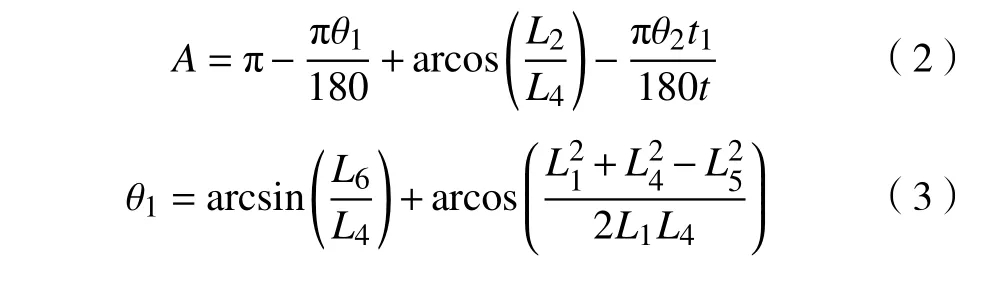
機構運動模型模塊在采樣時間t內天線負載勻速舉升過程中,根據公式(1)得到絕對式編碼器脈沖值的變化,并擬合出天線舉升機構理論運動曲線。公式(2)中各參數含義為:θ1為天線負載處于起點S1時中心距L1與水平面夾角,θ1由公式(3)獲得;θ2為天線負載處于終點S2時的天線仰角;t為采樣時間;t1為在區間[0,t]范圍內以采樣周期T累加的變化時間。

數據對比分析模塊依據擬合的天線舉升機構實際運動曲線和理論運動曲線,建立OTS坐標系。在同一采集時間t內,平均n等分分段實際運動曲線和理論運動曲線,n≥6,先得出殘差平方和,再依據公式(4)得出擬合度指標R。根據擬合度指標R識別多級液壓天線舉升機構運動平穩性差異。公式(4)中Si、分別為第i等分段實際運動曲線和理論運動曲線的脈沖值。
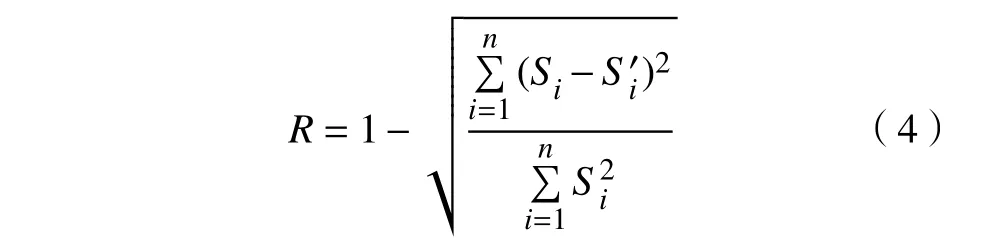
當擬合度指標R在(0.95,1]范圍內,則判定為合格,表明多級液壓天線舉升機構運動平穩性符合要求;當擬合度指標R在(0.95,1]范圍之外,則判定為不合格:因此,根據輸出的脈沖差值Si-,定性判斷多級液壓天線舉升機構哪些運動階段需要速度調整。
2.3 檢測系統軟件設計
基于檢測系統的硬件,系統軟件設計流程圖如圖6 所示。結合檢測系統的軟硬件設計,平穩性檢測系統操作流程如下。
步驟1,將檢測裝置安裝在多級液壓天線舉升機構上,并采集初始化參數,在檢測裝置與數據采集處理系統之間建立通信連接。

圖6 檢測系統軟件流程圖
步驟2,將安裝后的初始化參數值輸入至數據采集處理系統。
步驟3,由檢測裝置按采樣周期T獲取天線舉升機構的運動脈沖數值和從起點S1運動至終點S2的采集時間t,并輸入至數據采集處理系統。
步驟4,數據采集處理系統根據接收到的天線舉升機構的采樣時間點和對應的運動脈沖數值,擬合舉升機構的實際運動曲線和理論運動曲線。
步驟5,由數據采集處理系統對實際運動曲線和理論運動曲線進行分段,計算殘差平方和,進而得出擬合度指標R。
步驟6,根據擬合度指標值R識別舉升機構運動是否平穩,找出舉升機構在運動中平穩性差異區域,并輸出。
3 平穩性檢測系統的實際應用
將平穩性檢測系統應用于某多級液壓天線舉升機構。該機構的天線負載的角度通過三級油缸伸出長度來保證,舉升到位后角度為83.5°,三級油缸缸徑從大到小依次分別為200、160、120 mm,其對應桿徑變化為180、140、100 mm。將檢測裝置安裝在舉升機構上后,記錄多級液壓天線舉升機構從起點S1運動至終點S2的時間t。得到的初始化參數如表1 所示。
按照檢測系統的操作流程,將初始化參數輸入至檢測系統。擬合出的理論運動曲線、實際運動曲線,分別如圖7、8 所示,同時計算出的擬合度指標R,如圖9 所示。根據擬合度指標對原多級液壓天線舉升機構的液壓閥的流量做相應的改進控制,多次循環采集相關數據計算出多組擬合度指標,進而使多級液壓天線舉升機構運動趨于理論勻速運動。利用擬合度指標的量化數據,可以直接反映出2 臺或多臺舉升機構之間的運動差異性。針對實際的多級液壓機構,依據擬合度數據可以定向的對各級液壓機構流量做出針對性的調整。
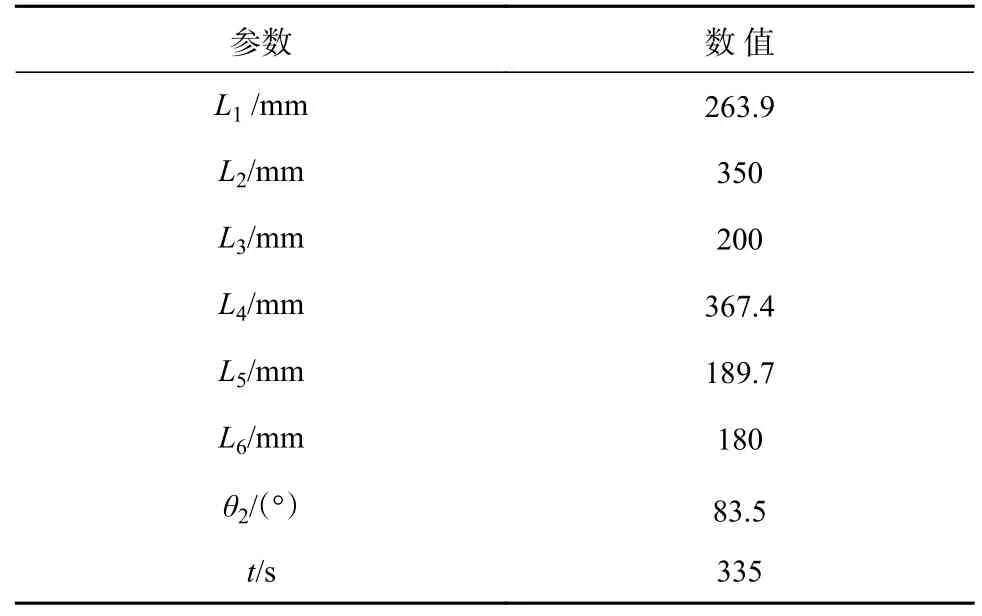
表1 初始化參數表
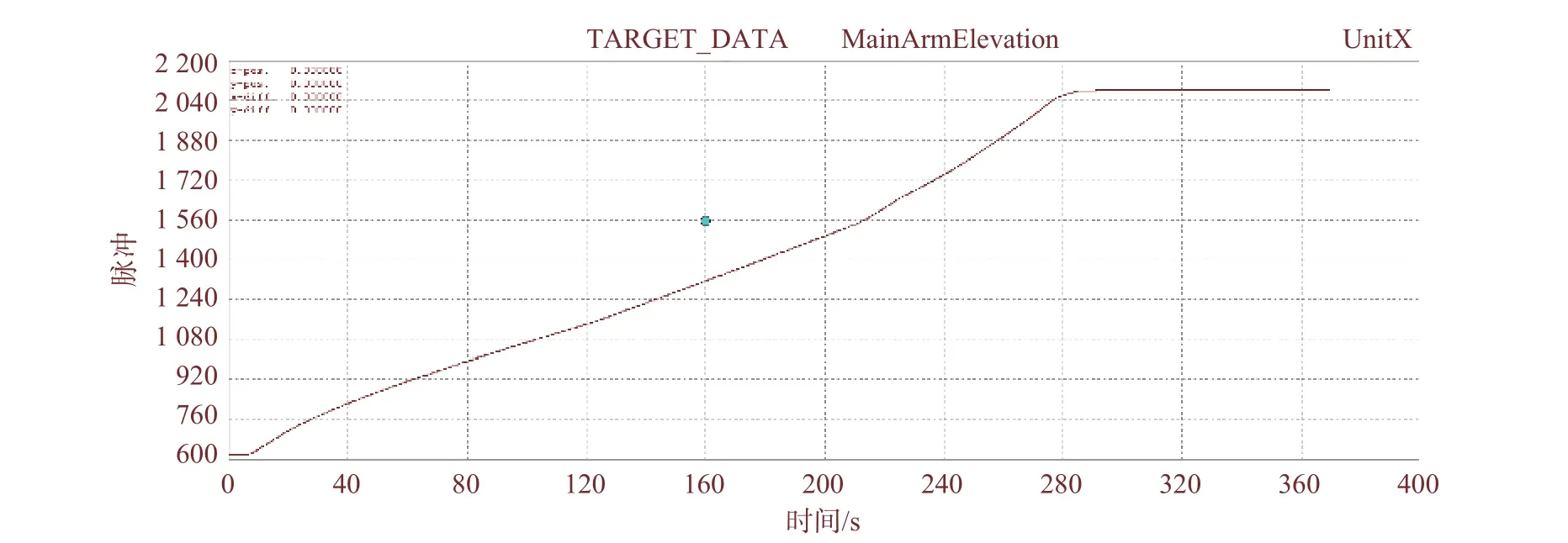
圖7 實際運動曲線
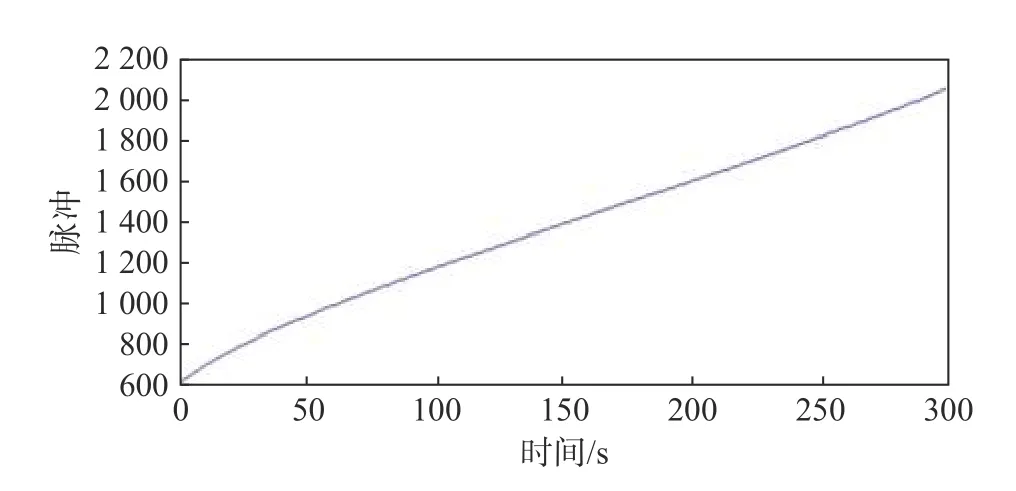
圖8 理論運動曲線
4 結論
本文針對多級液壓天線舉升機構運動平穩性識別問題,建立了一種檢測系統,介紹了具體的檢測方法和檢測裝置。對某多級液壓天線舉升機構運動的平穩性檢測,驗證了該系統不僅通用性好、便于安裝,而且能有效地判斷出多級液壓天線舉升機構運動過程中的速度變化,得出擬合度指標的量化數據和運動偏差數據,并依據擬合度數據定向地對各級液壓機構流量做出針對性調整。該檢測系統還可為后續預防性維護和預測維修提供指導依據。

圖9 平穩性運動分析圖
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
