政府補貼與新能源汽車企業研發的演化博弈研究
2021-01-07 00:55:40姜彩樓李瑋瑋
運籌與管理 2020年11期
姜彩樓,張 瑩,李瑋瑋,吳 崇
(南京信息工程大學 江北新區發展研究院,江蘇 南京 210044)
0 引言
發展新能源汽車是實現工業轉型、緩解生態環境壓力的重要手段。2001年,我國將新能源汽車列入“863”計劃優先資助領域,并提出“三縱三橫”研發及產業化路線。隨后,我國新能源汽車企業主要利用政府補貼、擴大國內市場和跟隨式創新等方式參與市場競爭。在政府采購、新能源汽車示范推廣等政策的不斷刺激下,我國新能源汽車生產規模和銷售數量迅速增長,并自2015年起躍居世界第一位。由于政府補貼主要集中于生產和銷售環節,針對研發環節的補貼相對較少,導致我國新能源汽車企業研發投入不足,核心技術和產品質量缺乏競爭力。研究政府補貼與新能源汽車企業研發的演化博弈關系,有助于我國進一步調整和優化新能源汽車產業政策方向。
在新能源汽車產業發展初期,政府補貼對于分散新能源汽車企業研發風險、降低新能源汽車企業研發成本具有重要意義,是補償新能源汽車企業研發外部性、促進新能源汽車企業高質量創新產出的重要手段[1~3]。在實證研究中,研究者發現政府補貼能夠對企業研發投資產生“擠入效應”和“信號效應”[4,5]。而在信息不對稱條件下,過強的政府補貼可能對企業研發產生“擠出效應”[6]。此外,政府補貼的效應還受到企業規模和產權性質的影響[7~9]。
通過構建博弈模型,曹霞等[10]發現高強度的政府補貼有利于新能源汽車企業原創性技術突破。徐建中等[11]發現政府綠色創新補貼與征收碳稅會促進企業突破式創新。李君昌[12]等發現政府補貼超過某一臨界值時,會提升企業研發投入水平。于麗靜和陳忠全[13]發現政府補貼的強度,以及政府補貼的方式均會影響企業研發投入。馬亮等[14]發現政府補貼和產業補貼可以刺激新能源汽車企業研發投入。Oikawa和Managi[15]認為普惠性補貼比選擇性補貼更容易激勵新能源汽車研發。在動態博弈分析中,周紹東[16]、安同良等[17]發現創新人力資本價格過低容易導致創新補貼抑制企業研發,甚至產生"逆向"激勵。秦字興[18]發現在創新驅動環境中,過高的政府補貼會對企業創新投入產生"擠出效應"。汪秋明等[19]發現在缺乏監督和懲罰的條件下,政府補貼難以促進企業研發。吳曉園和叢林[20]發現企業研發行為受到自主創新收益、自身創新能力和競爭對手策略影響。楊偉娜和劉西林[21]發現處于理性博弈方的企業會盡早采用新技術,而較高的產品需求會延遲企業采用新技術。
隨著中國取消新能源汽車企業外資股比限制,以及特斯拉、寶馬等在華投資生產新能源汽車,中國逐漸成為全球新能源汽車企業競爭的重要市場,提升核心創新能力成為我國新能源汽車企業獲取核心競爭力、推動新能源汽車產業向全球價值鏈高端躍升的關鍵。在實踐中,創新是一個連續、動態的過程,直接取決于新能源汽車企業研發方式及成功率、收益等關鍵因素。鑒于此,本文利用演化博弈理論,將新能源汽車企業研發分為自主研發和技術引進,并引入企業研發成功率、企業時間窗口收益等變量,構建政府補貼與新能源汽車企業研發決策的演化博弈模型,分析不同情境下新能源汽車企業開展自主研發和技術引進的演化過程,提出我國新能源汽車產業政策的調整和優化建議。
1 演化博弈模型的構建
1.1 描述與假設
在激烈的市場競爭環境中,新能源汽車企業的創新策略需要根據政府補貼和競爭對手的策略不斷進行調整。假設市場存在兩家差異化的新能源汽車企業,雙方都具有自主研發能力,企業目標是通過提升自主研發水平實現利潤最大化,分別定義為新能源汽車企業1和新能源汽車企業2。
假設政府對新能源汽車企業研發投入的補貼率為s。另外,假定新能源汽車企業自主研發的成功率為t,若兩家新能源汽車企業均采取自主研發策略,自主研發成功將獲得新技術帶來的企業壟斷性收益R1以及產業主導權收益R2;若1家新能源汽車企業采取自主研發策略,將獲得企業壟斷收益R1,并且可能需要承擔研發失敗帶來的時間窗口收益損失L1,同時另1家企業采取技術引進策略,將獲得時間窗口收益R3并承擔技術引進成本c2;若兩家新能源汽車企業均采取技術引進策略,將承擔技術引進成本c2,并且受到技術停滯帶來的產業主導權潛在損失L2。從博弈雙方隨機抽取一個企業進行分析,每個企業都會有“自主研發”和“技術引進”兩種策略。博弈雙方的收益如下所示:
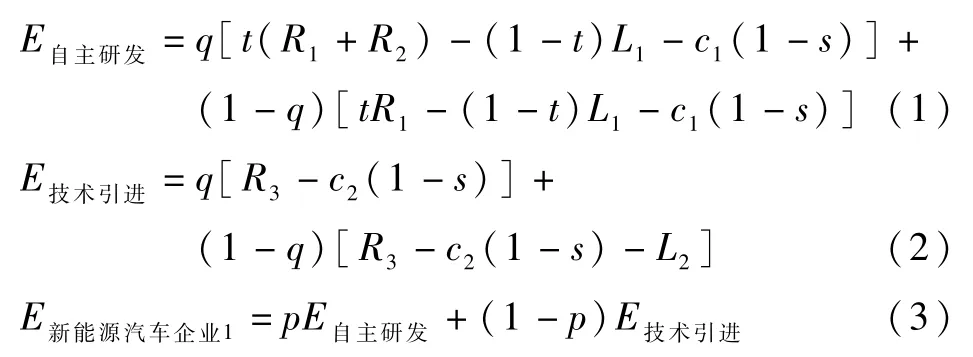
(1)當新能源汽車企業1和2同時選擇“自主研發”策略時,新能源汽車企業1和2除了能夠獲得企業壟斷性收益R1外,還將獲得由此獲得的新能源汽車產業主導權收益R2。因此,新能源汽車企業1和2得到的收益為(t(R1+R2)-(1-t)L1-c1(1-s))。
(2)假設新能源汽車企業1選擇“自主研發”策略,而新能源汽車企業2選擇“技術引進”策略,則新能源汽車企業1的收益為(tR1-(1-t)L1-c1(1-s)),新能源汽車企業2的收益為(R3-c2(1-s))。
(3)假設新能源汽車企業1選擇“技術引進”策略,而新能源汽車企業2選擇“自主研發”策略,則新能源汽車企業1和2收益分別為(R3-c2(1-s))和(tR1-(1-t)L1-c1(1-s))。
(4)假設新能源汽車企業1和2都選擇“技術引進”策略,雙方都能獲得時間窗口收益R3,并承受新能源汽車產業主導權損失L2。因此,新能源汽車企業1和2得到的收益都是(R3-c2(1-s)-L2)。
符號與含義見表1。

表1 符號與含義
1.2 演化博弈模型建立
假設新能源汽車企業1采取自主研發策略的概率為p,采取技術引進策略的概率為1-p。新能源汽車企業2采取自主研發策略的概率為q,采用技術引進策略的概率為1-q。其中,0<p<1,0<q<1。在決策過程中,新能源汽車企業1和新能源汽車企業2的研發策略會根據利益最大化準則不斷調整,p和q的取值會隨之發生變化,可以得到新能源汽車企業1和新能源汽車企業2的研發策略選擇的支付矩陣,如表2所示。

表2 新能源汽車企業研發策略選擇的支付矩陣
根據表2的支付矩陣,新能源汽車企業1采取“自主研發”和“技術引進”策略的期望收益以及其平均期望收益分別為:
由此可以得出新能源汽車企業1的復制動態方程:

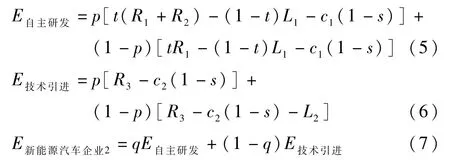
對于新能源汽車企業2而言,采取“自主研發”和“技術引進”策略的期望收益以及其平均期望收益分別為:
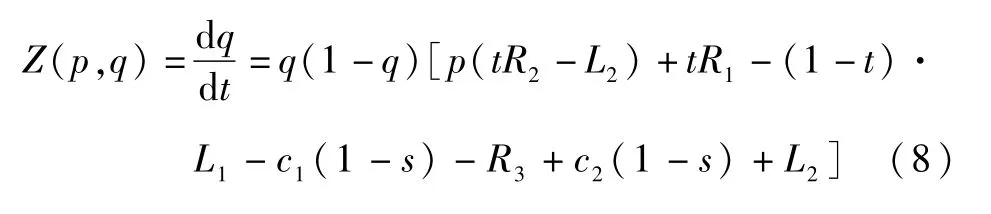
由此可以得出新能源汽車企業2的復制動態方程:
1.3 均衡的穩定性分析

新能源汽車企業研發策略的演化穩定性可通過對演化系統的雅克比矩陣的局部穩定性分析得出。本模型的雅克比矩陣為:
則矩陣J的行列式和跡分別為:
若局部均衡點滿足 |J|>0且tr(J)<0,則表明該均衡點是系統的演化穩定策略。5個局部均衡點在a11,a12,a21,a22的具體取值如表3所示。

表3 各局部均衡點的取值
其中A的表達式為:

根據上述的局部穩定性分析,可以得到如下結論:
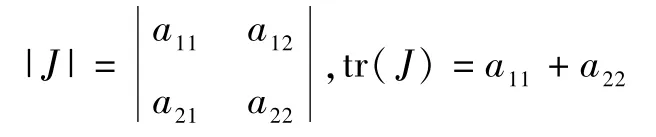
(1)情形1不論t和L2/R2關系如何,當滿足時,新能源汽車企業1和新能源汽車企業2研發策略演化的局部均衡點是(0,0),表示當政府補貼率低于臨界值時,新能源汽車企業會集體選擇技術引進策略。新能源汽車企業1和新能源汽車企業2研發策略演化的動態相位圖如圖1所示。
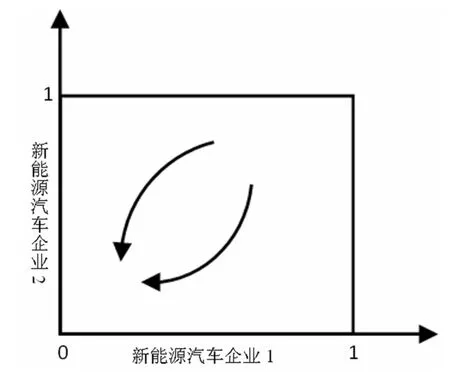
圖1 情形1下的演化相位圖
(2)情形2當時,新能源汽車企業1和新能源汽車企業2研發策略演化的局部均衡點是(0,1)和(1,0)。當新能源汽車企業自主研發成功率t小于新能源汽車產業主導權損失/產業主導權收益,且政府補貼率在之間時,新能源汽車企業1和新能源汽車企業2會出現技術引進與自主研發共存的局面。新能源汽車企業1和新能源汽車企業2研發策略演化的動態相位圖如圖2所示。
圖2 情形2下的演化相位圖
(3)情形3當時,新能源汽車企業1和新能源汽車企業2研發策略演化的局部均衡點是(0,0)和(1,1)。當新能源汽車企業自主研發成功率t大于新能源汽車產業主導權損失/產業主導權收益(),且政府補貼率在之間時,新能源汽車企業1和新能源汽車企業2的研發策略會同時趨向技術引進或自主研發。新能源汽車企業1和新能源汽車企業2研發策略演化的動態相位圖如圖3所示。
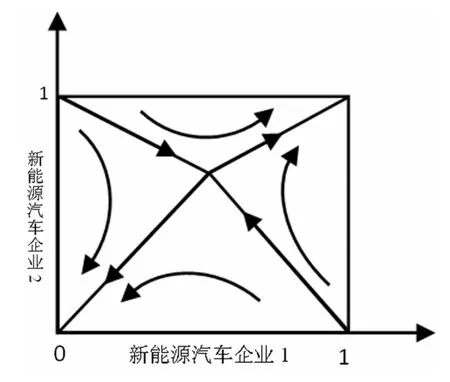
圖3 情形1下的演化相位圖
(4)情形4不論關系如何,當滿足s>時,新能源汽車企業1和新能源汽車企業2研發策略演化的局部均衡點是(1,1)。當政府補貼率高于臨界值時,新能源汽車企業會集體選擇自主研發策略。新能源汽車企業1和新能源汽車企業2研發策略演化的動態相位圖如圖4所示。
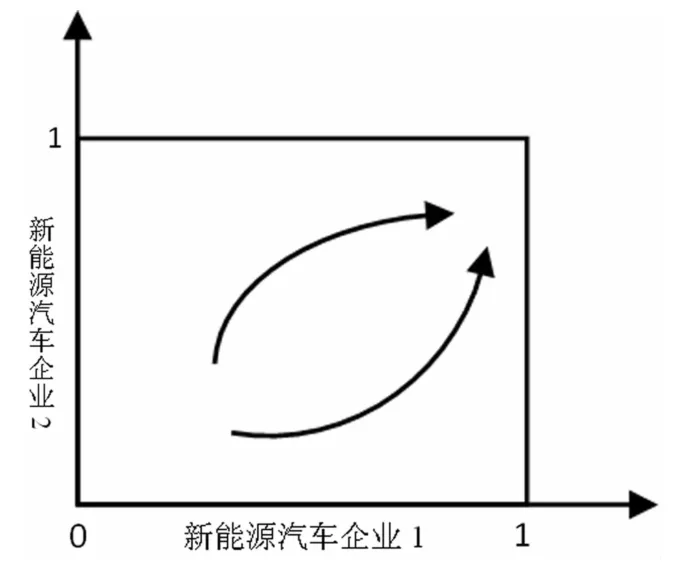
圖4 情形2下的演化相位圖
2 演化仿真
為了驗證政府補貼率、新能源汽車企業研發成功率等變量在不同參數取值下對新能源汽車企業研發策略的影響,我們進一步使用Matlab軟件進行演化仿真分析。考慮到新能源汽車企業進行自主研發的初始概率不同,并可能影響系統最終演化結果,我們選取兩組企業進行仿真模擬。其中,第一組新能源汽車企業1和新能源汽車企業2進行自主研發的初始概率假設為0.1和0.3,第二組新能源汽車企業1和新能源汽車企業2進行自主研發的初始概率假設為0.6和0.7。
(1)情形1不論關系如何,當滿足0<時,系統的演化穩定策略是(0,0)。不論t(新能源汽車企業自主研發成功率)和(新能源汽車產業主導權損失/產業主導權收益)如何變化,都存在(c1-c2)s+L2-M <0,且tR2-L2+(c1-c2)s+L2-M <0。結合圖5可以發現,當政府補貼率低于臨界值時,新能源汽車企業傾向于采用技術引進策略。盡管技術引進能在短期為新能源汽車企業帶來利潤,但是這種策略會在長期阻礙新能源汽車企業技術進步,形成技術依賴。在發展初期,由于新能源汽車企業缺乏技術基礎,自主研發的成本和風險比較高,在政府補貼率較低的情況下,新能源汽車企業很難積極主動地采取自主研發策略。
在新能源汽車企業自主研發成功率t不斷提高的情況下,由于M 是t的減函數,當t超過臨界值時,有(c1-c2)s+L2-M>0,且tR2-L2+(c1-c2)s+L2-M>0,新能源汽車企業也會逐漸采取自主研發策略。這說明在政府補貼比較低的環境中,只要能夠提升研發成功率,新能源汽車企業也會采取自主研發策略。現有政策要立足于提高新能源汽車企業研發人才積累,提升新能源汽車企業研發成功率,加快新能源汽車技術突破。
(2)情形2當時,系統的演化穩定策略是(0,1)和(1,0)。
當新能源汽車企業自主研發成功率t小于新能源汽車產業主導權損失/產業主導權收益且政府補貼率在之間時,有(c1-c2)s+L2-M >0,且tR2-L2+(c1-c2)s+L2-M<0。結合圖6可以發現,在自主研發成功率比較低,且政府補貼處于高臨界值與低臨界值之間時,自主研發意愿低的新能源汽車企業會趨向選擇技術引進,而自主研發意愿高的企業會趨向選擇自主研發,出現技術引進和自主研發共存的局面。
隨著t不斷提高,M 會不斷減小,有(c1-c2)s+L2-M >0依舊成立,而tR2-L2+(c1-c2)s+L2-M<0不再成立,這時新能源汽車企業將趨向選擇自主研發。
(3)情形3當時,系統演化的穩定策略是(0,0)和(1,1)。
當新能源汽車企業自主研發成功率t大于新能源汽車產業主導權損失/產業主導權收益且政府補貼率在之間時,有(c1-c2)s+L2-M <0,且tR2-L2+(c1-c2)s+L2-M>0。結合圖7可以發現,在自主研發成功率較高的情況下,新能源汽車企業研發選擇將會出現分化:在創新收益得到保障的環境中,新能源汽車企業能夠從協同創新中獲益,進一步強化研發行為[22,23];在創新收益無法得到保障的環境中,新能源汽車企業會趨向技術引進。
隨著自主研發成功率t的提升,M 會不斷減小,(c1-c2)s+L2-M <0將不再成立,而tR2-L2+(c1-c2)s+L2-M>0保持不變。說明在創新收益無法得到保障的環境中,如果能有效提升企業自主研發成功率,能引導企業選擇自主研發,通過技術突破形成良性循環[24]。
(4)情形4不論關系如何,當滿足時,系統的演化穩定策略是(1,1)。
不論新能源汽車企業自主研發成功率t和新能源汽車產業主導權損失/產業主導權收益如何變化,總有(c1-c2)s+L2-M >0,且tR2-L2+(c1-c2)s+L2-M >0。結合圖8可以發現,當政府補貼率高于臨界值時,新能源汽車企業傾向于自主研發。在發展初期,政府補貼能夠幫助新能源汽車企業分擔自主研發風險,降低自主研發成本,實現技術預期,從而促進企業自主研發投入。隨著新能源汽車企業自主研發成功率t增加,有(c1-c2)s+L2-M>0,且tR2-L2+(c1-c2)s+L2-M>0,新能源汽車企業傾向于采取自主研發策略。這說明在政府的高補貼政策下,提高新能源汽車企業自主研發成功率,是促進新能源汽車企業自主研發的有效手段。

圖5 情形1下的演化仿真圖
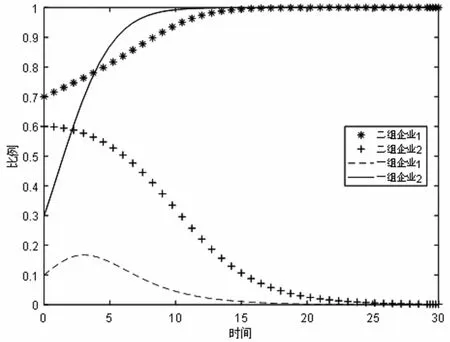
圖6 情形2下的演化仿真圖

圖7 情形3下的演化仿真圖

圖8 情形8下的演化仿真圖
3 結論與啟示
新能源汽車企業研發策略受到政府補貼率、研發成功率等多重因素的影響。總體而言,當政府補貼高于臨界值時,能夠促進新能源汽車企業自主研發投入。當政府補貼低于臨界值時,新能源汽車企業會采取技術引進策略。在研發成功率比較高的情況下,良好的創新環境容易促進新能源汽車企業自主研發,進而形成協同創新的氛圍[25]。在創新收益得不到保障的環境中,新能源汽車企業更傾向于技術引進,獲得短期利益。研發成功率較高會促進新能源汽車企業自主研發,反之會傾向于技術引進。基于以上研究結論,我們提出如下政策建議:
(1)我國新能源汽車企業發展初期面臨研發成本高、研發風險大等困難,政府需要提高研發補貼力度,降低新能源汽車企業自主研發成本。我國針對新能源汽車生產和銷售環節的補貼較多,針對研發環節的補貼數量相對不足,難以有效降低新能源汽車企業自主研發風險。我國需要調整政府補貼的功能和標準,增強對新能源汽車企業研發的激勵,提高新能源汽車企業自主研發積極性。
(2)提高研發成功率是促進新能源汽車企業自主研發的內在要求,是新能源汽車企業獲得自主技術的基本前提。對于新能源汽車企業而言,要注重內部高端研發人才的培養和引進,并加強同外部專業研究機構的合作,不斷提高自身研發能力和研發成功率。
(3)營造良好的協同創新環境。要強化知識產權保護,構建專業服務平臺,培育自主創新文化,以塑造良好的創新環境引導新能源汽車企業協同創新。
猜你喜歡
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
數學大世界(2018年1期)2018-04-12 05:39:14
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
瞭望東方周刊(2016年40期)2016-11-02 18:30:31
作文大王·低年級(2016年4期)2016-04-18 00:24:37
風能(2015年4期)2015-02-27 10:14:36
風能(2015年4期)2015-02-27 10:14:34
決策探索(2014年21期)2014-11-25 12:29:50
時代英語·高三(2014年5期)2014-08-26 02:49:51