油漆噴涂機器人在核電工業廠房的應用研究
2021-01-07 13:36:16李佩君
粘接 2021年12期
關鍵詞:工業廠房
李佩君
摘 要:工業機器人是第4次工業革命的重要組成部分。油漆噴涂機器人是可進行自動噴漆或噴涂其他涂料的工業機器人,其在信息化基礎上采用仿真和自動化技術,從而實現智能化管理,能替代油漆工人的大部分體力勞動,減低施工安全健康風險,提高施工效率和節省工程成本。油漆噴涂機器人在核電工業廠房中的應用,是未來智造的重要發展方向。
關鍵詞:油漆;噴涂機器人;工業廠房
中圖分類號:TQ639.8;TP242 文獻標識碼:A ? ? 文章編號:1001-5922(2021)12-0088-05
Research on Application of Paint Spraying Robot in Nuclear Power Industrial Plants
Li? Peijun
(China General Nuclear Power Group, UK project,Bristol, The United Kingdom, BS8 3LL)
Abstract:Industrial robots are an important part of the fourth Industrial Revolution. Paint spraying robot is an industrial robot that can automatically spray paint or spray other paints, which adopts simulation and automation technology on the basis of informatization. Thus the intelligent management is realized. In addition, paint spraying robots can replace most of the manual labor of painters. Where, construction safety and health risks have been reduced, construction efficiency has been improved, and project costs have been saved. The application of paint spraying robot in nuclear power industrial plants is an important development direction of intelligent manufacturing in the future.
Key words:Paint; Spraying robot; Industrial plants
0 引言
目前油漆機器人在汽車油漆噴涂中大量應用,技術已比較成熟,但在工業廠房中運用較少。建筑業是典型的勞動密集型行業,特別是室內裝修和質量檢測等環節,全球范圍內暫無自動化和智能化產品[1];且建筑施工機器人市場尚不成熟,市場接受度、運營模式和商業模式等均有待探索和創新。本文研究油漆噴涂機器人在核電工業廠房裝修工程中代替人工進行油漆噴涂的應用,研究對象是某國際機器人公司推出的智能噴涂機器人。本文依托的目標項目為英國某新建核電站的工業廠房油漆噴涂作業。
1 研究背景及現狀
油漆作為工業廠房的主要施工材料,在常用的噴涂過程中,油漆工人主要使用噴槍噴涂或者手工滾筒涂刷方式。但因油漆涂料中含有甲醛、氡、甲苯、二甲苯、苯、乙二醇醚類溶劑等大量有毒化合物,所以油漆噴涂屬于有害危險品的高風險施工。噴涂過程中,霧狀漆顆粒和漆的有機溶劑易揮發至作業場所空氣中,導致苯濃度非常高。油漆除了通過人體肺部吸入,還可以通過皮膚吸收,人體皮膚直接與油漆接觸,能溶去皮膚中的脂肪,造成皮膚干裂、發炎的同時侵入體內。若在無防護情況下,人體如果攝入苯過多,輕則會出現再生障礙性貧血,重則會患上白血病。在油漆噴涂過程中,油漆易揮發且易燃,容易發生火災等安全事故。尤其在核電工業廠房中,由于部分區域的施工空間狹小,通風條件差,施工環境惡劣,噴涂作業存在極大安全風險。因此,如何科學噴涂成為核電施工安全文明施工重要課題和研究方向。
油漆噴涂機器人是一個重要發展方向[2]。目前,大量的油漆機器人應用于廠房車間內,多為固定的六軸,可以完全模擬人工油漆噴涂工作,并施工質量控制良好,性能可靠,例如瑞士的ABB 公司為汽車制造廠設計的汽車油漆噴涂機器人和深圳榮德公司生產的六自由度的串聯油漆噴涂機器人。在國內外核電站建設中,土建承包商曾使用油漆機械代替人工進行膩子涂刷工作,但是存在由于技術尚未完成成熟,施工后仍需要人工修補,作業成本高等,施工質量不穩定問題,因此未繼續推廣,但保留后續研發的可行性。在人工成本日益增加,熟練工種培訓難度大等情況下,建造方對生產成本低,施工作業質量可靠,安拆簡便,作業標準化,運維方便且能在惡劣環境中自主工作的噴涂機器人有急切的需求和大規模應用的要求。
隨著技術的發展,新型智能化機器人結合了機械控制理論、計算機技術、材料科學、人工智能、物聯網、仿生科技等跨學科的協同[3]。通過自動控制的主機編程對三軸或以上的機械手臂進行控制,具備替代人工作業的條件,實現從 “人力噴涂” 到 “智能噴涂”變革。油漆噴涂機器人擁有輕型化/微型化,噴涂定位速度快,作業精確度高,主動調整和糾偏,施工質量有保證,作業缺陷少,節省材料和降低入場服務條件等條件,具有很好的應用前景。
2 核電工業廠房噴涂應用場景概述
核電作為應對能源危機和氣候變化的有效手段,在國內外作為主要的新能源進行大量建設。油漆在核電站中主要作用為防水,防輻射,抗腐蝕等,一臺核電機組的油漆噴涂量較大(約200萬m2),油漆采用核級油漆系統,標準人工噴涂施工流程如下:
(1)基層驗收:在廠房混凝土施工完成后,油漆施工前將養護劑和各種表面污物清理,用干抹布擦拭干凈后,按照標準進行平面平整度驗收。
(2)膩子修補。膩子主要用來對基層局部缺陷和密集細小孔洞進行填充,對較大的缺陷和較深的孔洞要添加石英砂,用以保證油漆基底的平整度。
(3)底漆施工。底漆施工前要進行基層含水率、環境溫濕度、混凝土表面溫度、露點溫度檢測。含濕率:不大于6%。混凝土表面溫度,露點溫度:5~35℃,環境溫度高于露點溫度3℃,底漆采用核級水性環氧聚酰胺涂料,厚度約為40 μm。
(4)中間漆和面漆。中間漆和面漆采用核級水性環氧聚酰胺涂料,厚度約為100 μm。施工前要檢測環境溫濕度和表面溫度,施工過程中要監測濕膜厚度。油漆完成后需要進行附著性和拉拔試驗進行驗收。
核電工業廠房噴涂工程存在施工作業要求較嚴格,輔助工序較多,對工人的熟練程度要求高且用工量大,噴涂作業受天氣和其他施工作業交叉影響大的特點。由于采用大量人工操作,會存在導致現場施工環境較差,施工質量不穩定,施工效率較低,油漆損耗量多不利于成本節約,安全健康隱患等問題。
因此,油漆噴涂機器人需要以核電工業廠房的現場施工工藝流程為基礎,通過仿生學參考和借鑒人工經驗進行優化,并依靠大數據的人工智能分析進行合理的設計與規劃[4]。
3 油漆噴涂機器人應用設計和試驗
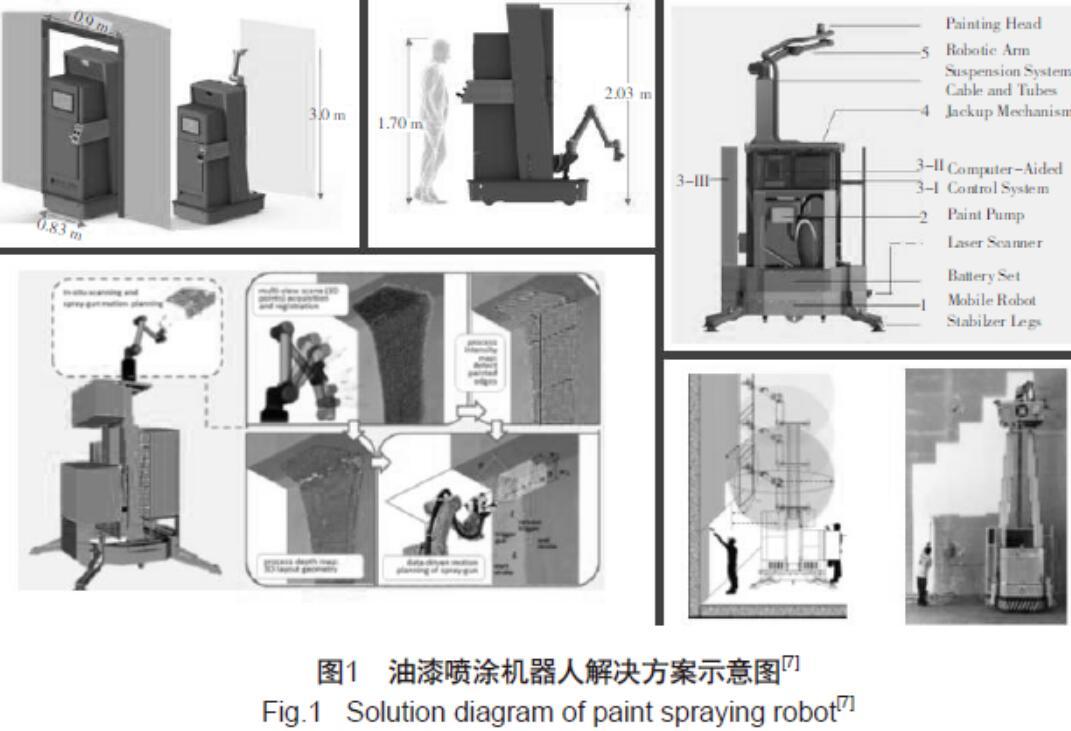
根據上述工業廠房噴涂工程的要求,研究的智能噴涂機器人采用的“在線感知-實時規劃-噴涂控制”的技術方案[5],根據涂料工業的“四E”原則(經濟、效率、生態和能源)和機器人仿生學的設計方法論[6],適合噴涂大范圍的不規則/規則幾何表面,應用場景能覆蓋大部分核電工業廠房的標準。由于基層驗收和膩子修補可以在土建過程中完成,因此,油漆機器人重點解決室內噴漆和混凝土或者鋼板基底的表面噴涂需求,如圖1所示。
3.1 油漆機器人設計
油漆噴涂機器人經過多輪設計方案的比選和量產調整后,可滿足設計的要求。
(1)油漆噴涂機器人為串聯機器人結構,主要由機器人本體,噴涂結構,計算機及相應的傳感和控制系統組成。機器人的總體框架包括傳感器檢測系統,驅動系統,機械臂控制系統,噴槍系統,油料存儲系統,防碰撞系統,抗干擾系統,基于以太網的數據傳輸系統等組成。機器人按照模塊分為電源模塊,啟停/復位模塊,控制模塊,傳感器模塊,通訊模塊,人機交互模塊,數據存儲模塊。該設計與主流噴涂機器人相近,設備材料技術成熟度高。
(2)在噴涂機器人采用八軸結構模塊化設計,在剛度、冗余度和累計誤差方面有較大優勢。通過電腦集成的控制器進行編程和多軸建協同控制運動作業,應對不同幾何結構的盲點,具有很好的靈巧性,能較好地應對曲面結構和噴涂的奇異位的場景,具有達到快速移動,精準定位的特點。
(3)機器人尺寸采取輕量化設計,1.48 m×0.83 m×2.0 m,自重400 kg。通過安裝有垂直直線驅動器,使機械手獲得3~10 m的涂裝高度和0.6~1 m寬度的平面。因此,不需要搭設腳手架,使噴槍精確就位,覆蓋大部分噴涂場景,相比人工具有較大優勢。
(4)噴漆系統由噴漆泵、自動噴漆槍、軟管等組成,覆蓋主流品牌涂料系統。可根據不同類型的油漆(單組分型和雙組分型(需要預混合)溶劑型涂料,水性涂料油漆等)采用對應的油漆泵和噴槍處理。噴涂采用靜電噴涂方式,根據靜電吸引的原理,在噴槍的噴頭增設高壓靜電發生器,在涂料中加入導電劑,經過壓縮空氣吹出的油漆顆粒帶正電荷,在電場力作用下直接被吸附在被涂面或物件上。靜電吸附使油漆能均勻附著至噴涂區域,控制涂料的噴涂范圍和防止油漆顆粒散落在空氣中,有效提高利用率。通過智能噴涂軟件Smart Paint進行自動化控制噴涂,控制噴涂厚度以減少噴涂油漆的損耗,通過噴嘴自動清潔避免噴嘴損壞。
(5)油漆機器人上采用ASPA(自動掃描、仿真模擬,規劃路線和噴涂控制)的軟件,可接入建筑信息模型(BIM),可以在任意幾何表面進行噴涂,實現全自主作業智能導航。通過解析法的數學運算,將作業環境的空間采用數學方程確定噴涂表面空間位置,自動計算和優化噴涂軌跡。機器人能自動測算作業環境的溫濕度,露點溫度和濕膜厚度。
(6)通過軟件和傳感器使噴油噴嘴與噴油表面,通過保持恒定的距離,控制速度和噴漆槍的運動軌跡。通過對噴漆參數的控制,如泵的壓力,流量,來實現油漆噴涂質量智能化控制。
(7)機器人采用(ROS) 操作系統,可通過導航操縱桿控制,遠程操作,自主導航進行24 h作業。即使在弱光條件下,也能夠在指定區域內自行導航。最大可通過坡度12°。安裝有防碰撞系統,具有自適應表面跟隨, 門/窗/障礙自動規避等功能。
(8)采用模組化快換電池包供電(電壓24 V (DC),電池容量96 Ah),一次滿電可連續工作4 h,效率為45 m2/h,作業噪聲小,響應塊,穩定性好。機器人平臺集成40 L油漆桶,能覆蓋大約120 m2的面積,并通過無線網絡實時反饋施工作業狀態。
(9)油漆機器人只需要一名操作人員,培訓和使用門檻低。在接受正確的機器使用培訓后即可操作,無需任何特殊要求。由于施工時不需要人員值守,降低了工業健康風險。
3.2 油漆機器人應用模擬試驗
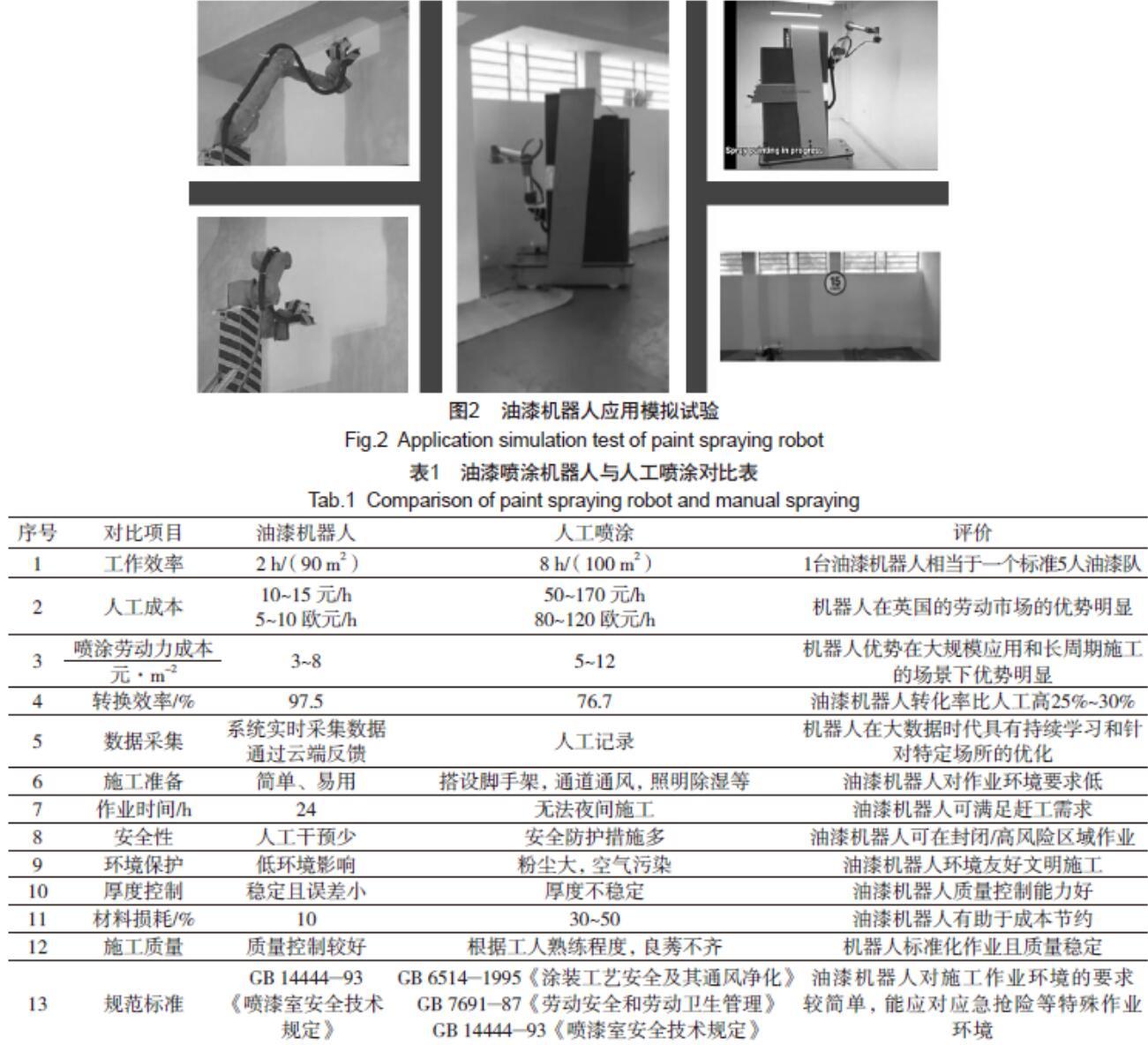
油漆噴涂機器人生產根據與核電商討的應用模擬試驗方案,對混凝土基底的噴涂作業開展模擬試驗,試驗結果滿足設計要求。油漆機器人應用模擬試驗示意圖如圖2所示。
根據模擬試驗結果,油漆機器人與人工噴涂的效能對比如表1所示。
4 不足及應用建議
油漆噴涂機器人在模擬試驗過程中發現以下問題,同時附解決方案。
(1)機器噴涂路線有重疊,容易造成局部區域二次噴涂。此時可增加模擬試驗,收集數據反饋優化處理。
(2)傳感器對窗臺孔洞等不需要噴涂區域的噴涂邊界識別率低。為此,除提高機器人傳感器硬件的靈敏度外,可在非噴涂區域貼設警示條。
(3)機器人主機自動重啟和復位的問題。這可通過更新機器人軟件處理。
(4)因涂料未及時攪拌而干硬,造成噴槍堵塞等問題。鑒于此,待機器人廠商和油漆供貨商協同解決。
除了以上問題外,對機器人的大規模應用還有幾點建議:
(1)油漆噴涂機器人可通過OEM代工模式,將技術研發和生產分開,降低每臺設備的成本至50萬元人民幣后可提高設備經濟性。
(2)機器人廠家需要給業主提供一整套的解決方案,如油漆噴涂機器人與油漆檢測機器人的聯動,通過三維掃描和驗收,辨別油漆厚度平整度,輔助傳統的質量員質檢工作,加強施工質量控制。
(3)使用集成遠程管理平臺(云端),管理員實時地獲取油漆噴涂機器人工作狀態信息,以便及時對施工質量進行評定和統計數據。
(4)機器人廠家可通過與高校和行業協會的合作,完善油漆噴涂機器人相關的施工作業標準和規范依據。
5 結語
油漆噴涂機器人作為一個技術可行、配套成熟的建筑涂裝整體解決方案,在核電領域內得到推廣和應用。它可大幅降低人工成本,提高施工效率,節省油漆損耗量,提高現場文明施工程度,降低油漆施工帶來的工業污染廢物,實現綠色生態環境友好施工。
參考文獻
[1](英)斯利格.機器人學的幾何基礎[M]. 楊向東譯.北京:清華大學出版社,2018.
[2](美)理查德·摩雷,(中)李澤湘. 機器人操作的數學導論[M]. 北京:機械工業出版社,2014.
[3]陳 雁,邵君奕,張傳清,等. 噴涂機器人自動軌跡規劃研究進展與展望[J]. 機械設計與制造,2010(02):149-151.
[4]張永貴. 噴漆機器人若干關鍵技術研究[D]. 西安:西安理工大學,2008.
[5]GRACO. The Basics of Airless Spraying: Information on Basic Components, Spray Techniques and Safety[M]. Minneapolis:[s.n], 2012.
[6]THOMAS R, KURFESS. Robotics and Automation Handbook[M]. [S.I.]:CRC Press, 2010.
[7]ASADI E, Li Bingbing, Chen Yiming. A Cooperative Painting Robot for Interior Finishing of Industrial Developments[J]. IEEE Robotics & Automation Magazine, 2018, 25(2):82-94.
猜你喜歡
科技創新與應用(2017年6期)2017-03-23 22:31:01
中國新技術新產品(2017年6期)2017-03-20 23:31:30
科學與財富(2017年1期)2017-03-17 11:46:20
科學與財富(2017年5期)2017-03-17 10:43:47
科學與財富(2017年2期)2017-03-15 15:35:49
建筑建材裝飾(2016年11期)2016-12-29 18:32:29
建筑建材裝飾(2016年11期)2016-12-29 18:25:02
建筑建材裝飾(2016年9期)2016-12-29 16:53:41
科學與財富(2016年26期)2016-12-01 10:50:17
建材發展導向(2016年3期)2016-05-23 08:47:57