空間遙感器用環路熱管瞬態數值模擬與在軌驗證
2021-01-08 04:05:14孟慶亮楊濤于志趙振明趙宇于峰
北京航空航天大學學報 2020年11期
關鍵詞:模型
孟慶亮,楊濤,于志,趙振明,趙宇,于峰
(1.北京空間機電研究所,北京100094; 2.先進光學遙感技術北京市重點實驗室,北京100094)
空間電荷耦合器件(Charge-Coupled Device,CCD)相機是目前應用最為廣泛的航天遙感器之一,已被廣泛應用于軍事偵察、資源探測和測繪等領域[1]。CCD器件是CCD相機的核心組件,其工作性能受溫度影響較大,熱電噪聲隨溫度的升高呈指數遞增,如果溫度波動較大,熱噪聲變化不定,會給電路設計和信號輸出帶來較大的負面影響[2-3]。隨著空間CCD 相機的不斷進步,其對CCD器件的溫度要求越來越高,傳統的熱控方法受限于傳熱量、安裝尺寸及溫度穩定性逐漸難以滿足精密控溫需求,需要采用新的熱設計方法和熱控產品對CCD相機進行散熱與控溫[4]。
環路熱管(Loop Heat Pipe,LHP)是一種先進的航天熱控產品,通過利用毛細芯內產生的毛細力驅動工質在熱源與熱沉之間循環實現熱量的獲取、傳輸和排散,其已廣泛應用于電子設備、電池、光學儀器等設備的散熱和控溫[5-6]。為適應CCD相機的控溫需求,北京空間機電研究所于2015年首次將LHP應用于高分九號衛星CCD相機的精密控溫,通過將蒸發器與熱源CCD器件進行解耦,利用加熱器給蒸發器加熱,產生毛細力,驅動流體在蒸發段吸收CCD器件的發熱量,在冷凝段將熱量釋放出去[7]。迄今為止,高分九號衛星相機用LHP已在軌成功應用超過4年,結果表明,LHP能夠很好地滿足CCD相機在軌散熱及控溫的需求,并實現了±0.5℃的控溫精度[8]。
目前,對于LHP的研究主要以實驗為主,理論分析和數值模擬相對較少。盡管通過實驗測試可以獲得實測數據,但受限于觀測手段,一些物理參數并不能夠準確被獲取,如實驗中工質在各部件中的溫度只能通過測試相關的壁面溫度來近似,無法了解流體溫度的真實變化情況,有時甚至會存在很大的差異。除此之外,目前的實驗通常成本高、周期長,而且易受外界因素的影響,尤其是當LHP在軌應用時,受限于地面實驗手段,實驗測試已經很難準確預測結果。相比于實驗研究,理論分析和數值模擬可以獲得更多的傳熱與流動參數,并可以快速預測航天環境(微重力、高真空、4K深低溫等)下的瞬態工作特性,其對于LHP產品在軌應用、模式調整和故障分析具有重要的指導意義。
目前,用于研究LHP的數值模型,包括穩態模型和瞬態模型。在穩態模型方面,國內外研究者建立了不同復雜度的數學模型[9-13],并在穩態壓力降、可變熱導特性、毛細芯內壓力降、兩相流型等方面取得了一些進展。然而考慮到空間遙感器的瞬態工作特性,穩態模型已不再適用。在瞬態模型方面,Wrenn等[14]與Hoang、Ku[15]建立了LHP的模型,通過與實驗結果比較,發現誤差較大;Pouzet等[16]建立了較全面的毛細泵驅回路動力學數值模型,該模型對于建立LHP模型具有重要的指導意義;Cullimore和Baumann[17]基于節點-網絡法建立了LHP模型,可以用于研究LHP的 啟 動 瞬 態 特 性;Zinna等[18]利 用 SINDA/FLUINT軟件設計和模擬了LHP熱控系統,該系統主要用于AMS-02上的冷磁電路盒的冷卻;Xin等[19]建立了LHP的系統模型,用于分析不同外熱流和工況下AMS-02上制冷機的瞬態工作特性;何發龍等[20]建立了深冷LHP的瞬態模型,可用于分析深冷LHP在固定輔熱載荷作用下的傳熱特性變化規律,并通過實驗結果進行了驗證。
然而,針對空間遙感器用LHP的瞬態數值模擬研究較少,一方面現有的模型進行了一些假設,如忽略了毛細芯漏熱對儲液器的溫度影響,導致蒸發器與儲液器的仿真溫度偏差較大,又如采用多項式計算工質熱物性,導致熱物性偏差較大,模型精度不高;另一方面,由于缺少在軌飛行數據的支撐,現有模型的準確性和有效性尚未獲得驗證。基于此,本文針對空間遙感器用LHP的結構組成和運行特性的特點,建立了LHP系統級瞬態數值模型。首先,給出空間遙感器用LHP的控溫原理和數學模型。然后,將仿真結果與在軌數據進行了對比,給出了模型預測的溫度偏差。最后,分析了高低溫工況下LHP組件各參數的變化趨勢。
1 控溫原理
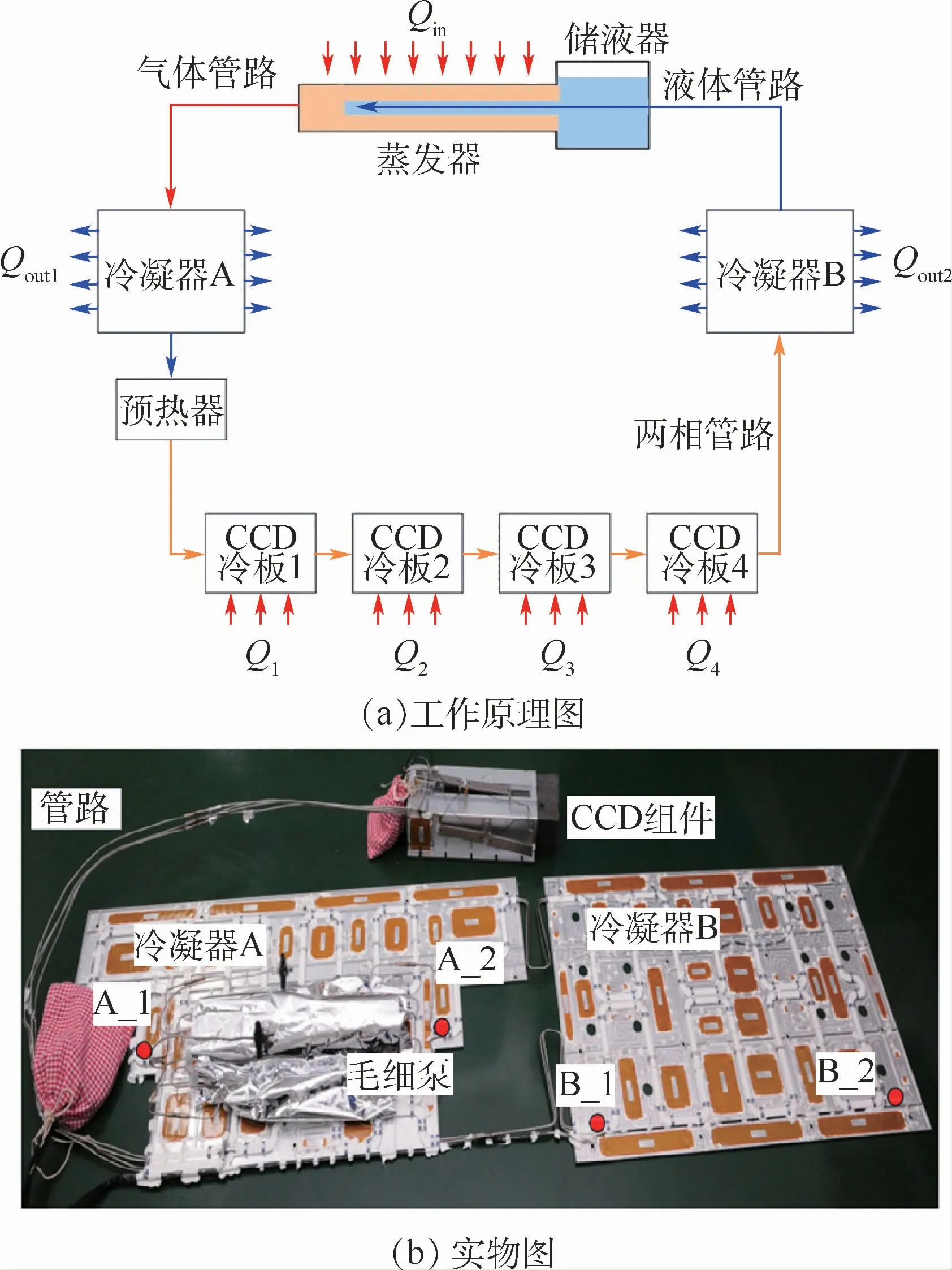
圖1 空間遙感器用LHP工作原理圖和實物圖Fig.1 Working principle and photo of LHP for space remote sensor
圖1為高分九號衛星CCD相機用LHP的應用示意圖和實物圖。通過加熱器給蒸發器加載熱量Qin,使蒸發器內部的液體工質汽化,產生毛細力,驅動氣態工質從毛細泵中流出,工質先經冷凝器A變成液態,釋放Qout1熱量,再經預熱器變為飽和流體后到達CCD冷板,吸收CCD相機的熱量(Q1+Q2+Q3+Q4)后,最后經冷凝器B變成液體,釋放Qout2熱量后回流到儲液器當中,如此往復循環實現了CCD相機的散熱。測點A_1位于冷凝器A回液管附近,用于監測回流液管路溫度,測點A_2位于冷凝器A蒸汽管路出口附近,用于監測蒸汽管路的溫度;測點B_1位于冷凝器B管路出口附近,用于監測出口管路的溫度,測點B_2位于冷凝器B管路中間位置,該點對應了冷凝器的最低溫度變化。此外,A_1和B_2還被用做2個冷凝器控溫點,防止冷凝器溫度過低,LHP內部工質凍結。
LHP的控溫點,即兩相工質在CCD冷板內的吸熱溫度,其與儲液器的溫差為[21]

式中:ΔPccd-cc為CCD冷板與儲液器內工質的飽和壓力差;(d P/d T)sat為工質在壓力-溫度圖上飽和線的斜率;Tccd和Tcc分別為CCD冷板和儲液器內工質的溫度。對液氨工質,(d P/d T)sat較大,如5℃時為3.78 kPa/℃,LHP正常循環時,由于工質流量較小,且回路內基本為光滑管路,回路流阻較小,若壓差為1 kPa,則溫差為0.26℃。因此,通過控溫手段保持儲液器溫度恒定,其內飽和蒸汽壓力就維持恒定,整個系統也就穩定在這一壓力上,相應的CCD冷板內兩相工質便穩定在該壓力對應的飽和溫度上。
2 數學模型
通過圖1可以發現,區別于傳統散熱型的LHP,本文研究的LHP主要對多點熱源進行控溫,LHP的管路布局和結構組成更加復雜,這增加了數值分析的難度和復雜度。LHP瞬態數值模型涉及了回路內工質分布、熱力學狀態變化及傳熱傳質特性。基于此,本文針對空間遙感器的應用特點,模型的主要特性包括:
1)對蒸發器通過毛細芯向儲液器的漏熱,綜合考慮了工質物性、流量及毛細芯參數的影響。
2)LHP內部的工質物性參數來源于REFROP數據庫,保證了仿真精度。
3)通過將流體節點的比焓與純液相或氣相焓的比較,判斷工質的相態。
4)考慮了工質冷凝過程中涉及的輻射、熱傳導、氣液相變等多耦合過程。
此外,模型還采用了如下假設:
1)管路內工質的單相流動狀態考慮為充分發展狀態。
2)兩相流阻力的計算采用分相流動模型,即將氣相和液相分別按單相流處理,單相和液相考慮具有不同的物性和速度。
3)蒸發器的徑向熱流密度假設為均勻,儲液器始終處于飽和狀態。
4)忽略壓力變化引起工質的能量變化。
2.1 控制方程
LHP的瞬態數值模型包括熱模型和流體模型[17],如圖2所示。熱模型通過熱流傳遞和連接的溫度點組成熱體系網絡,主要用于計算分析系統(蒸發器、儲液器、冷凝器管路的壁面及輻射器節點)的熱量傳遞,熱模型包含固體溫度Ts、固體熱容c等參數;流體模型通過流動方式和流體節點組成流體網絡,可以計算流體傳遞過程和熱流耦合的流動問題,流體模型包含工質與內壁的對流換熱系數h、壓力P、流體溫度Tf、密度ρ、質量流量 ˙m等參數。
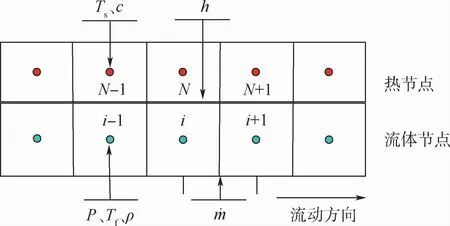
圖2 熱模型和流體模型示意圖Fig.2 Schematic diagram of thermal and flow models
熱模型主要為熱節點,其基本方程為能量方程,表達式為

式中:Prl=μlcpl/kl,μl、cpl和kl分別為液相工質黏度、定壓比熱容和導熱系數;P*=P/Pc,Pc為臨界壓力;各參數的定性溫度取兩相段的飽和溫度;x為工質的質量分數(干度)。
流體模型包括流體節點和流動路徑。流體節點的質量方程為
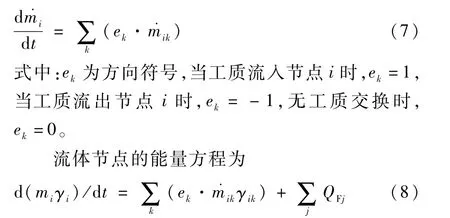
式中:ζ為局部阻力系數。
工質為兩相時,ΔPf的計算采用Friedel模型進行計算,該模型考慮了重力加速度、表面張力等影響因子,模型的預測結果與實驗的誤差較小,表達式為[25]
式中:μ、g、σ分別為黏度、重力加速度、表面張力系數,下標v和l分別表示氣相和液相;ρtp=[x/ρv-(1-x)/ρl]-1。
在蒸發器中,流體從毛細芯內壁穿過毛細芯到達外壁的流動阻力ΔPf,w為

式中:ro和ri分別為管路外徑和內徑;Kw為毛細芯的滲透率;Lw為毛細芯的長度。
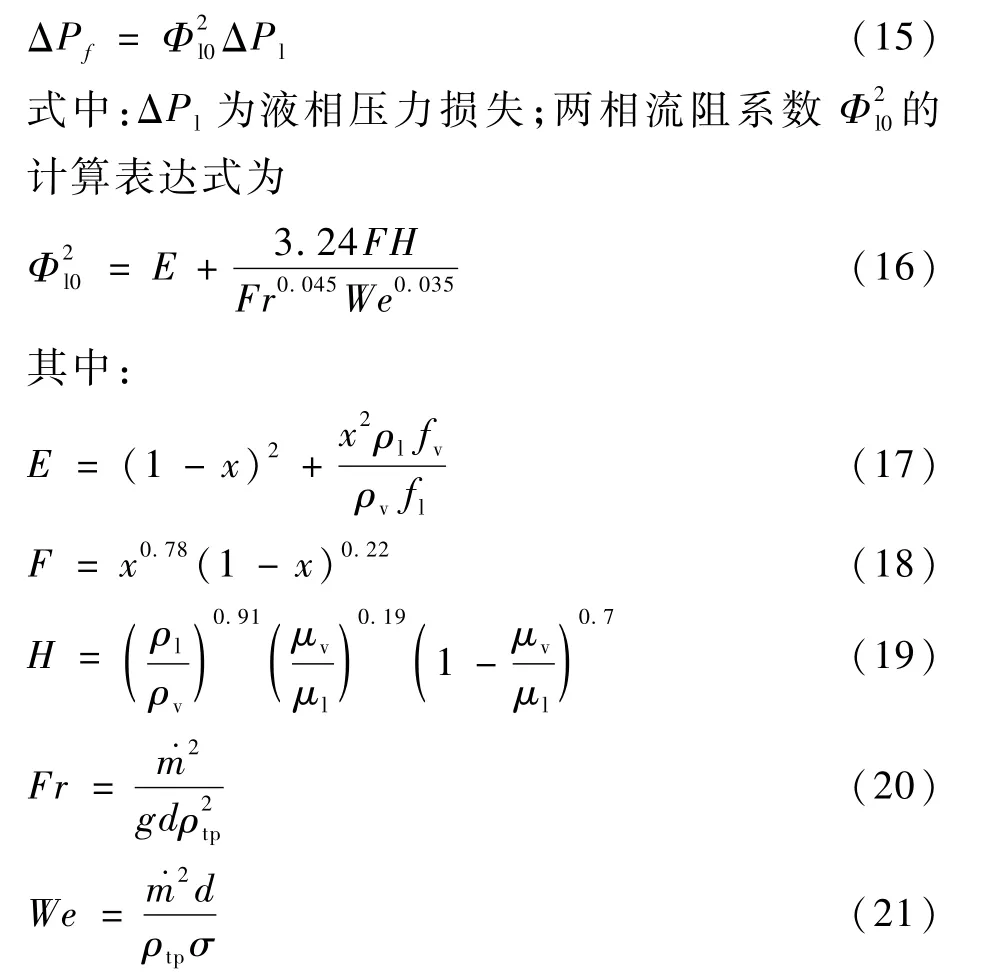
2.2 毛細泵模型
圖3給出了毛細泵的示意圖和熱網絡圖。LHP的毛細泵由蒸發器和儲液器采用一體化設計組成,這兩者之間存在著復雜的傳熱傳質關系。
通過加熱器加載到蒸發器壁面上的熱量Q用于蒸發毛細芯中液體的熱量Qe為

式中:QL-W、QL-a、QL-v分別為通過濕毛細芯漏熱給儲液器的熱量、通過蒸發器壁面向儲液器壁面的漏熱量、用于過熱蒸發器槽內生成蒸汽的熱量。
毛細芯向儲液器漏熱的主要途徑為濕毛細芯的徑向漏熱。由于LHP的毛細芯在正常工作時其內部有工質的流動,單純地采用毛細芯的有效導熱系數來計算是存在較大偏差的。
由于工質的流動速率非常慢,毛細芯內部充滿工質的圓柱狀毛細芯的能量方程可以由穩態方程表示為
圖3 毛細泵的示意圖和熱網絡圖Fig.3 Schematic diagram of capillary pumped and thermal network

式中:γlv為汽化潛熱,其與工質的飽和溫度和飽和壓力相關。
2.3 相變計算
在LHP的預熱器、CCD冷板和冷凝器內存在氣液相變的過程。在預熱器內,工質從液相轉變為氣液兩相態;在CCD冷板內,飽和工質的干度不斷增加,繼續維持兩相態;在冷凝器內,工質從兩相態變為液相態,釋放熱量。本文通過將每個流體節點計算得到的比焓與飽和液相比焓γsat_l和飽和氣相比焓γsat_v進行比較,從而判斷工質的狀態。
當γ<γsat_l時,工質為液相,吸收的熱量將使工質溫度上升,即
2.4 初始和邊界條件
模型的初始條件為T=6℃,干度x=0,壓力P=0.53 MPa。
模型的邊界條件包括:①Tsink=-269.15℃(4K),冷凝器輻射邊界;②管路壁面處為絕熱邊界;③LHP系統在軌工作時,冷凝器將受到外熱流的影響。
圖4分別給出了冷凝器A和冷凝器B在高溫和低溫工況下外熱流隨時間的變化趨勢。
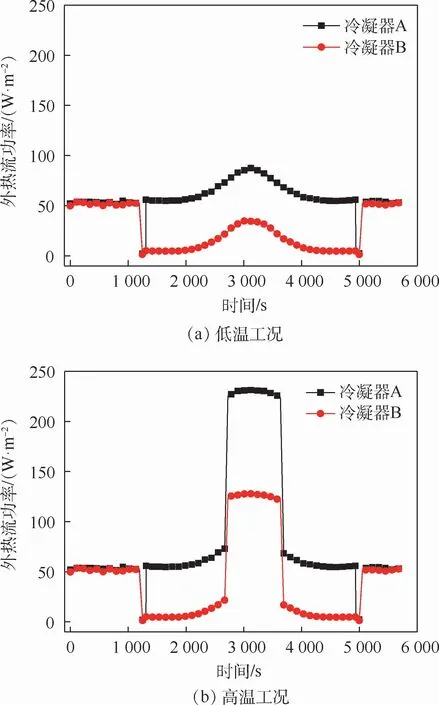
圖4 冷凝器A和冷凝器B外熱流隨時間變化趨勢Fig.4 Temporal evolution of external heat flux of condenser A and B
2.5 計算參數
本文的計算模型參數采用高分九號衛星CCD相機用LHP的設計參數,其主要由毛細泵組件、CCD冷板組件、冷凝器組件及氣液管路串聯焊接組成。表1給出了LHP的基本參數。
表2給出了LHP的溫控組件參數,加熱回路通過控溫儀控制,LHP溫控組件的設計狀態見表2。
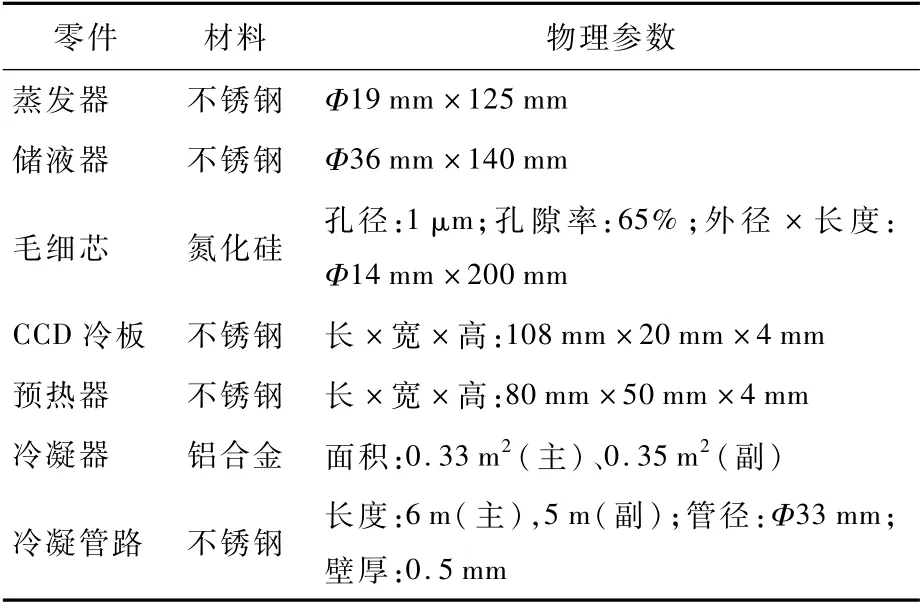
表1 LHP的基本參數Table 1 Basic parameters of LHP
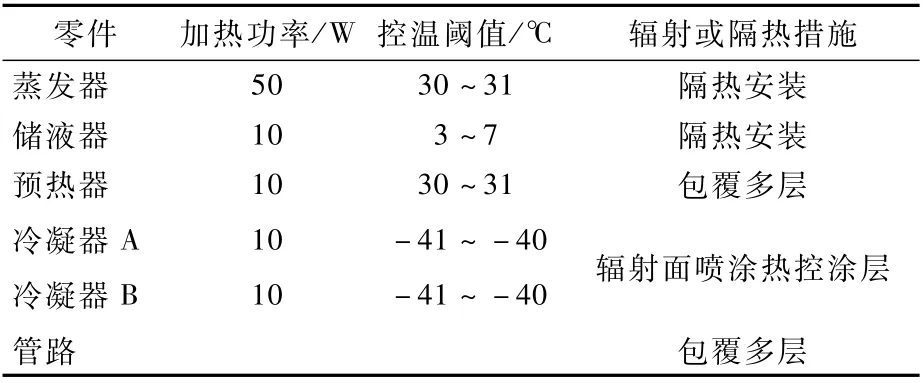
表2 LHP的溫控組件參數Table 2 Parameters of temperature control components of LHP
綜合上述方程和計算參數構成了LHP的瞬態數值模型,結合工質物性參數庫(本文使用的工質為液氨),以及初始和邊界條件,即構成了對LHP系統內部完整的熱力學-流動狀態的描述。所得到的非線性方程組先通過Newton-Rapson方法進行線性化,再通過高斯迭代方法進行求解,當滿足收斂判據時,迭代結束,得到計算結果。在計算迭代過程中,如迭代次數超過一定次數仍未收斂,將降低時間步長重新開始迭代。
3 結果和討論
3.1 模型驗證
圖5為CCD相機關機與開機時,LHP蒸發器與儲液器溫度的仿真模擬結果與在軌飛行數據(2015年9月18日09:48—09:58和11:00—11:20)的對比。CCD相機關機時,蒸發器和儲液器的在軌溫度實測值分別維持在7.2℃和5.6℃附近,仿真模擬結果預測的溫度分別維持在7.1℃和5.5℃附近。CCD相機開機時,蒸發器的在軌溫度從初始的7.3℃逐漸上升至7.7℃,儲液器的在軌溫度從初始的5.8℃上升至6.0℃(這主要是由于CCD相機開機時,系統的兩相段長度不斷增加,系統的流阻不斷增大,從而導致了蒸發器飽和溫度的上升),蒸發器的模擬溫度從初始的7.4℃上升至7.6℃,儲液器的模擬溫度維持在5.6℃附近。此外,通過圖5(b)可以發現,蒸發器的仿真斜率相較實驗數據較小,這主要是由于仿真過程中忽略了相機焦面組件對CCD的漏熱影響,相比于CCD器件的熱量,該部分熱量相對較小,此外,該部分熱量較難通過實驗測得,因此,本文忽略焦面組件漏熱的影響。通過對比可以發現,在預測蒸發器和儲液器溫度變化趨勢的方面,數值模擬結果的偏差很小,且準確預測了開機與關機時不同的溫度變化趨勢。
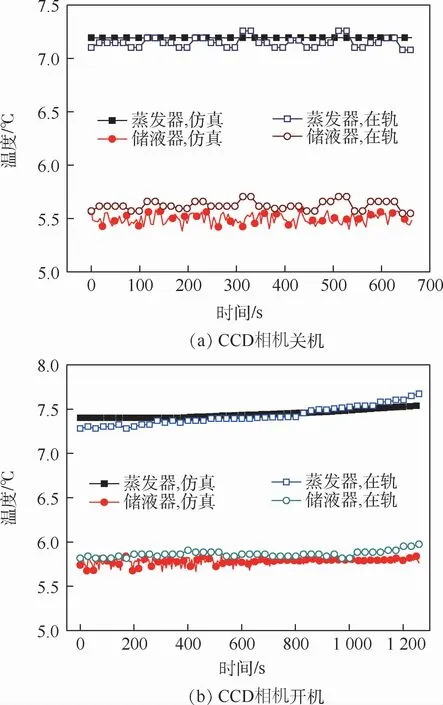
圖5 蒸發器與儲液器的仿真與在軌溫度對比Fig.5 Comparison of on-orbit temperature between simulation and test for evaporator and accumulator
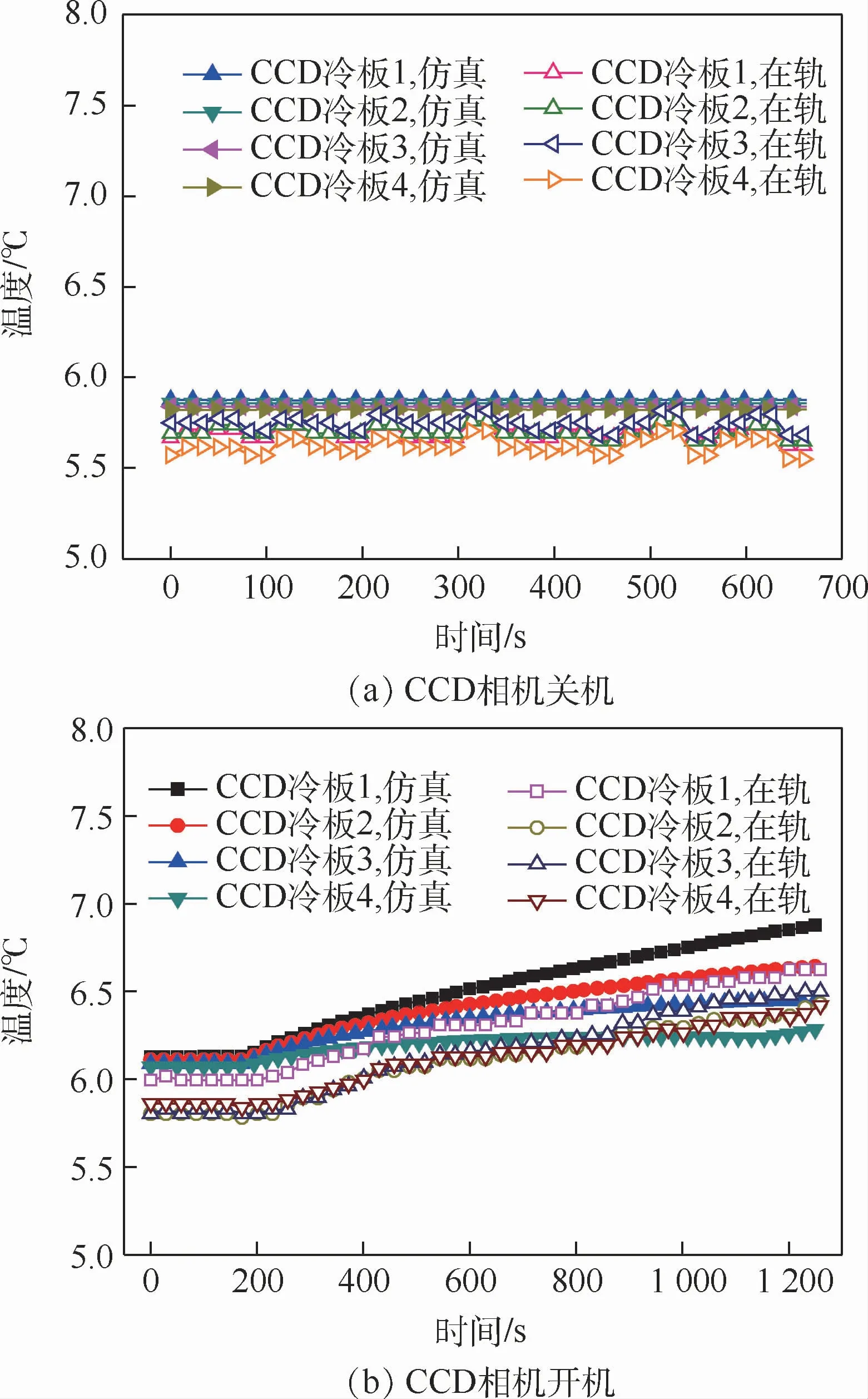
圖6 CCD冷板的仿真與在軌溫度對比Fig.6 Comparison of on-orbit temperature between simulation and test for CCD cold plates
圖6為CCD相機開機與關機時,LHP 4片CCD冷板的仿真與在軌結果(2015年9月18日09:48—09:58和11:00—11:20)的對比。CCD相機關機時,4片CCD冷板溫度在軌實測值維持在5.5~5.8℃,仿真模擬結果維持在5.8~5.9℃。CCD相機開機時,4片CCD冷板殼體的溫度在軌實測值從5.8℃逐漸上升至6.6℃,4片CCD冷板溫度上升值約為0.3~0.8℃,仿真模擬結果從6.1℃上升至6.8℃,4片CCD冷板的溫度上升值約為0.2~0.8℃。CCD相機開機時,兩方面原因導致了CCD冷板溫度的上升。一方面,冷凝器溫度上升,回流至儲液器中液體工質溫度上升,導致系統控溫點-儲液器的溫度上升,CCD冷板內工質的飽和溫度隨之上升;另一方面,系統兩相段長度不斷增加,工質在CCD冷板與儲液器內的壓差不斷增大,也拉大了CCD冷板與儲液器的溫差。通過對比可以發現,CCD相機關機時,仿真模擬數據與在軌結果的差值在0.3℃附近,CCD相機開機時,兩者的差值為0.2~0.4℃。考慮到相機測控溫設備本身的控溫精度±0.5℃的影響,溫度誤差的范圍在此區間內,因此,仿真誤差滿足LHP工程應用的要求。
圖7為冷凝器A和冷凝器B上4個測點溫度的仿真與在軌實驗結果(2018年1月21日09:00—17:20)的對比。冷凝器上溫度的變化主要受外熱流和加載功率的影響。在圖7中,4個測點模擬結果的偏差分別在0.5℃附近、0.5~1℃、1~2℃、1~2℃,導致二者偏差的主要原因是由于仿真模型中忽略了相機中的安裝桁架的影響,實際應用中,相機桁架會通過熱傳導的方式向冷凝器漏熱,導致冷凝器的實際溫度有些偏高。通過對比可以發現,仿真數據與在軌結果的偏差較小,這表明仿真模型準確考慮了接觸熱阻和外熱流的影響。
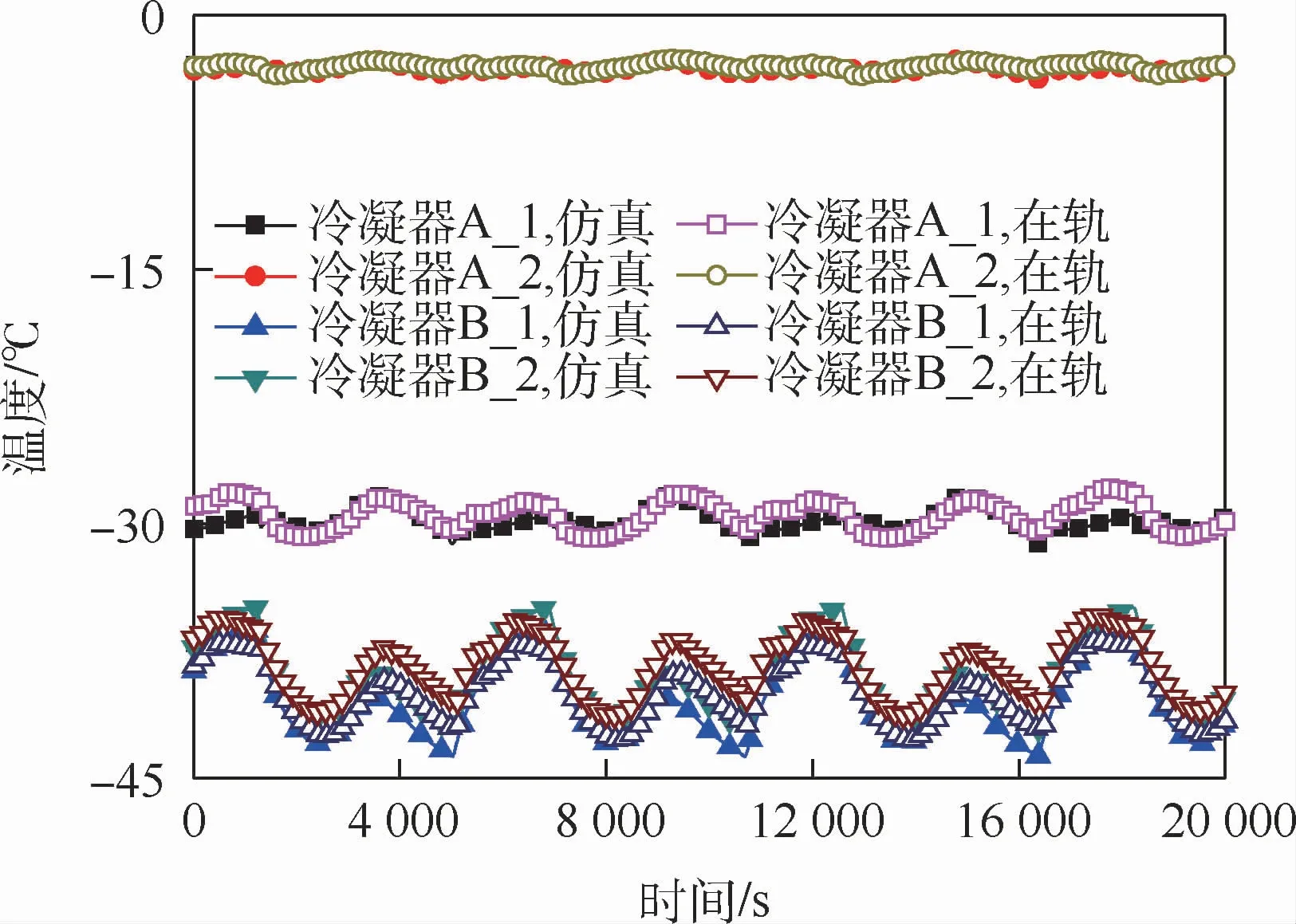
圖7 冷凝器的仿真與在軌溫度對比Fig.7 Comparison of on-orbit temperature between simulation and test for condenser
通過圖5~圖7仿真數據與在軌結果的對比,一方面檢驗了模型的誤差較小,其中,內部組件的溫度偏差在0.2~0.4℃以內,冷凝器測點的偏差在0.5~2℃以內;另一方面檢驗了模型所設置的接觸熱阻和外熱流等參數的準確性。結果表明,模型的有效性和準確度較高,可以用于預測LHP系統的瞬態工作特性。
3.2 內部流體參數的數值計算結果
為進一步分析LHP系統瞬態的工作特性,本節通過建立的數值模型對LHP系統各部件內流體的參數進行分析。
圖8給出了低溫和高溫工況下,預熱器內流體的溫度和干度隨時間的變化趨勢。為了保證進入到CCD冷板內的流體為兩相態,需要在冷凝器A出口與CCD冷板之間設置預熱器,通過加熱預熱器使流體從過冷態變為兩相態。圖8中:1、3、5、7、9、11、13、15表示了預熱器流道從入口到出口不同位置處的流體。通過圖8(a)、(b)可以發現,低溫工況時,預熱器入口流體的溫度受到外熱流影響存在波動,經過預熱器加熱,出口流體的溫度穩定在6℃附近,出口干度穩定在0.13附近。通過圖8(c)、(d)可以發現,高溫工況時,預熱器入口流體的溫度受到外熱流和CCD工作模式共同的影響,出口流體溫度穩定在6℃附近,出口干度為0.125~0.19。預熱器保證了進入到CCD冷板內的流體為兩相工質。
圖9給出了低溫和高溫工況下,CCD冷板內流體的溫度和干度隨時間的變化趨勢。低溫工況下,CCD相機不工作,受外熱流影響,CCD冷板內飽和流體的溫度為6.0~6.1℃,干度為0.13左右。因此,低溫工況時,飽和態的兩相工質通過干度的調節消除軌道外熱流的影響,以接近恒定的溫度流經CCD冷板,從而確保了CCD溫度的恒定。高溫工況時,CCD相機工作時,CCD冷板內飽和流體的最大溫升為0.1℃,干度從入口處的0.12上升到了出口處的0.90。高溫工況時,相比溫度的變化,干度的變化趨勢更明顯,干度從入口處的0.12上升到了出口處的0.90,但工質仍是兩相態。比較工質的溫度,可以發現溫度沿著4片CCD器件呈現下降的趨勢,這主要是由兩相壓降引起的。由于飽和氨的溫度壓力變化率之比(d T/d P)很小,兩相壓降造成的沿程溫差很小(<0.1℃),從而保證了4片CCD器件工作溫度的均勻性。
圖10為低溫和高溫工況下,蒸發器向儲液器通過濕毛細芯的漏熱量隨時間的變化曲線。2.1節分析中,蒸發器向儲液器的漏熱包括2部分,分別為通過濕毛細芯的漏熱和通過壁面的漏熱,經過仿真計算,濕毛細芯為主要的漏熱途徑。低溫工況下,漏熱量在1.7~1.8W 之間,其波動主要受外熱流的影響。高溫工況下,CCD相機不開機時,漏熱量與低溫工況相同;CCD相機開機后,漏熱量上升至2.0 ~2.7W,這是由于CCD的開機導致了蒸發器的溫升,從而造成了漏熱量的增加。
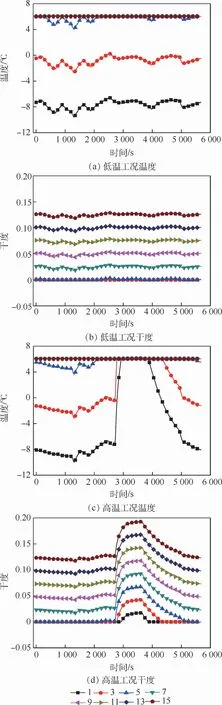
圖8 預熱器內流體的溫度和干度隨時間的變化曲線Fig.8 Temporal evolution of fluid temperature and degree of dryness in pre-heater
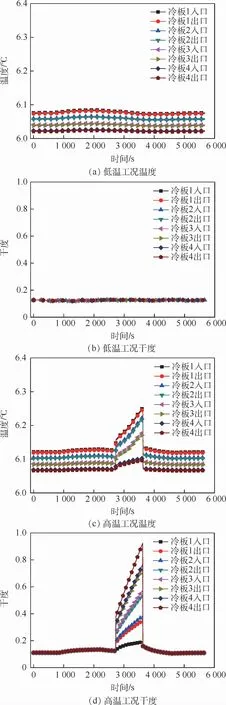
圖9 CCD冷板內流體的溫度和干度隨時間的變化曲線Fig.9 Temporal evolution of fluid temperature and degree of dryness in CCD cold plates
圖11為低溫和高溫工況下,LHP系統流阻隨時間的變化曲線。低溫工況時,系統的流阻在2 200~2 300 Pa之間;高溫工況時,系統的流阻從CCD相機開機時的2 200 Pa快速上升至3 000 Pa,而后逐漸上升至4 700 Pa,CCD相機關機后,系統的流阻從4 700 Pa快速降至2 500 Pa,隨后逐漸恢復至開機前的壓力狀態。高溫工況下,CCD相機開機引起的流阻變化可以解釋為:CCD相機產生的熱量將冷板內兩相工質中的部分液體蒸發,引起干度增加,進而導致系統內的氣液兩相段長度邊長,從而造成系統流阻的增加,CCD相機關機后,由于受熱容的影響,兩相段長度的縮減需持續一段時間,從而導致了圖11中3 500~4 500 s區間的2條曲線存在一些差異。
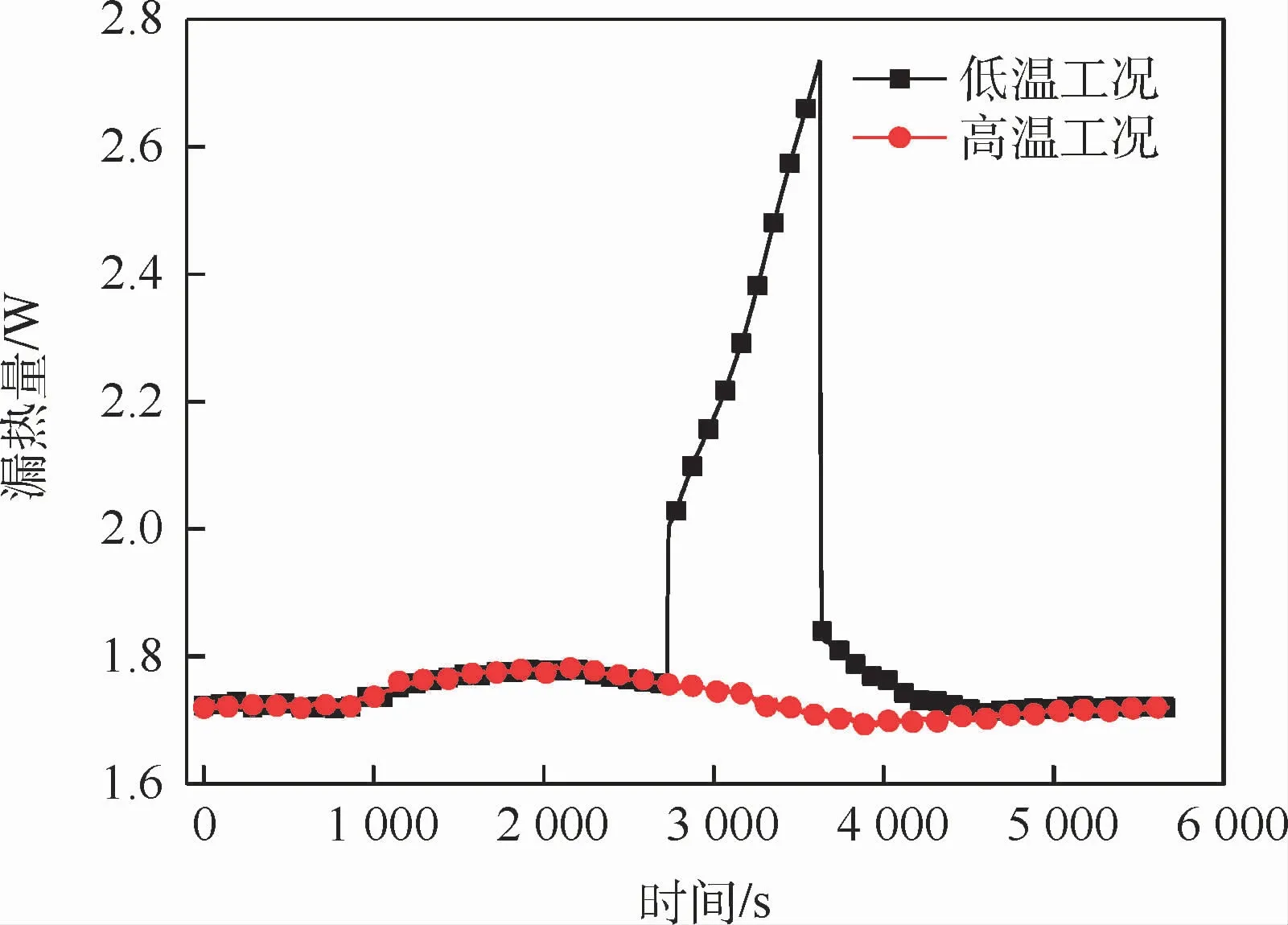
圖10 蒸發器向儲液器漏熱量隨時間的變化曲線Fig.10 Temporal evolution of heat leak from evaporator to accumulator
圖12為低溫和高溫工況下,冷凝器A和B溫度分布云圖(圖中黑色實線表示管路內兩相段的長度)。低溫工況時,輻射外熱流最小且內部熱源關機,此時除冷凝器B的左下邊緣區域,冷凝器的溫度在[-40,0]℃范圍內,驗證了冷凝器上加熱回路的控溫能力,確保了在此工況下冷凝器的最低溫度滿足要求。此時,從蒸發器和預熱器出來的蒸汽和兩相流體均經過較短的流動距離即被冷卻為過冷液體。高溫工況時,輻射外熱流最大且CCD相機開機,此時冷凝器的溫度范圍在[-35,+5]℃范圍內,且回流管所在區域的溫度范圍在[-10,-5]℃范圍內,確保了此工況下,內熱源和獲得的熱量均被有效排散出去及毛細泵的穩定運行。此時,兩相管路的長度較長,兩相流體經過較長距離的冷卻才被變為液態。
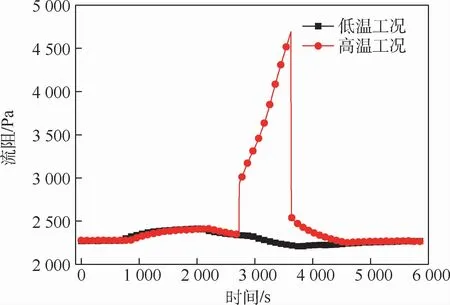
圖11 LHP系統流阻隨時間的變化曲線Fig.11 Temporal evolution of LHP system flow resistance
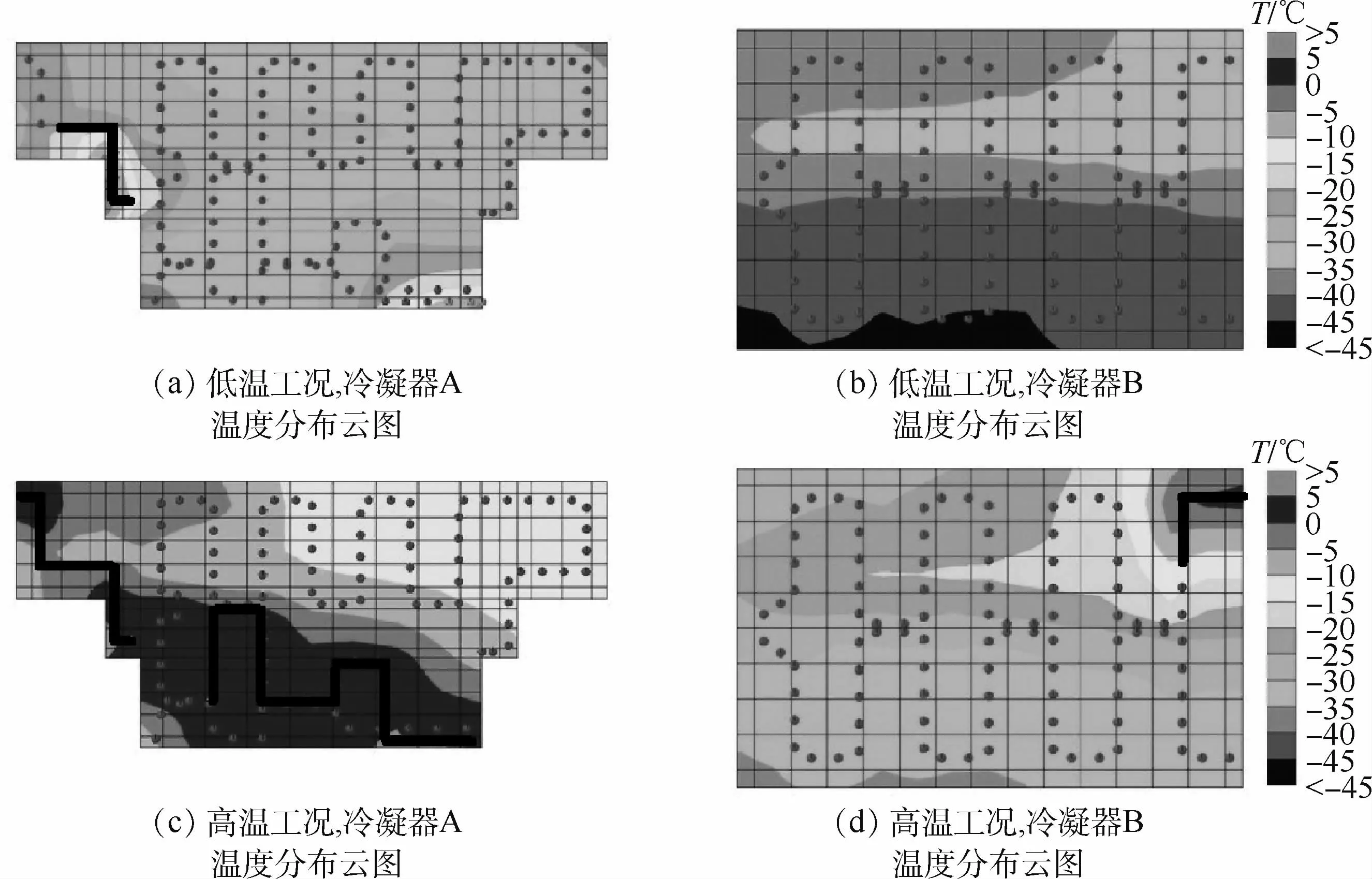
圖12 冷凝器的溫度分布云圖Fig.12 Temperature distribution contour of condenser
4 結 論
本文通過瞬態數值模擬,對空間遙感器用LHP系統內的熱力學和流動特性進行了研究。主要結論如下:
2.流行情況。鯉魚、鯽魚、鰱魚、鳙魚、金魚、鳊魚等多種魚類從苗種到成魚都會感染此病,尤以草魚、青魚最容易感染。對草魚、青魚的苗種危害最為嚴重。水溫5℃以上就開始發病,魚密度越大、水溫越高、水質越差,越容易流行暴發此病。
1)通過仿真數據與在軌結果的對比,檢驗了模型的誤差,內部組件的溫度偏差在0.2~0.4℃以內,冷凝器測點的偏差在0.5~2℃以內,驗證了數值模型對LHP瞬態溫度變化趨勢預測的準確性。
2)預熱器的設置保證了進入不同工況下CCD冷板內的流體均被加熱為兩相態;冷板內的兩相工質通過干度的變化來調節軌道外熱流和內熱源,其可以為CCD相機的運行提供溫度的邊界。
3)蒸發器向儲液器的漏熱和系統的流阻主要受熱源工作模式的影響,熱源關機時,漏熱和流阻較小,熱源開機時,漏熱和流阻較大。
4)通過模型驗證了冷凝器設計的合理性,冷凝器可以滿足高溫和低溫工況下的應用,冷凝器上兩相管路的長度受外熱流和內熱源的影響而發生變化。
本文所建模型可以用于研究軌道外熱流環境下,空間遙感器用LHP系統的傳熱與傳質過程,預測系統的瞬態工作特性,并指導相關產品的設計與研發。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19