傾轉四旋翼飛行器傾轉過渡走廊分析方法
2021-01-08 04:06:28俞志明陳仁良孔衛紅
北京航空航天大學學報 2020年11期
俞志明,陳仁良,孔衛紅
(南京航空航天大學 航空學院 直升機旋翼動力學國家級重點實驗室,南京210016)
傾轉四旋翼(QTR)飛行器屬于新型復合高速旋翼類飛行器。從外觀上看,傾轉四旋翼飛行器的設計可以視作是2架傾轉旋翼機縱向布置。它有4個可以繞傾轉軸轉動的旋翼短艙,被安裝在前后機翼的尖端。后機翼比前機翼略長和略高,后旋翼在前旋翼的外側。相較于傾轉旋翼機,傾轉四旋翼飛行器由于多了2副旋翼和機翼,因此四旋翼傾轉飛行器在速度和載重上有較大優勢。
在一個完整的飛行任務剖面內,傾轉模式是直升機模式和固定翼模式相互轉換的過程。該階段飛行器的重力和阻力需要各氣動部件的氣動力合理分配來克服。但小速度飛行時可能導致機翼所需迎角過大而造成機翼失速,大速度前飛時將可能造成旋翼后行槳葉失速、前行槳葉壓縮性以及單旋翼可用功率超過發動機額定輸出功率,旋翼和機翼動力穩定性還可能限制前飛速度[1]。在如此多的限制條件下,決定了傾轉四旋翼飛行器只能在一定的速度區間內進行直升機模式和固定翼飛機相互轉換。這個速度區間由所有可行的傾轉路徑組成,即傾轉過渡走廊。
準確確定傾轉過渡走廊重要性體現在2方面。首先,傾轉過渡走廊的寬窄是評價傾轉旋翼類飛行器傾轉難易程度和安全性的關鍵因素和指標,對于總體設計和氣動布局具有重要參考價值。其次,傾轉過渡走廊對于飛行控制系統的設計,也具有重要參考意義,如傾轉過渡起始速度點、過渡路徑、傾轉終止速度點的選擇等。因此,確定傾轉走廊是設計傾轉四旋翼飛行器的關鍵技術之一。文獻[2]認為XV-15機翼失速迎角限制了傾轉走廊的低速邊界,槳葉彎矩限制了其高速邊界。文獻[3]中認為低速邊界限制因素為機翼載荷,高速邊界限制條件為槳葉載荷。文獻[4]認為低速邊界為機翼失速限制邊界,高速邊界為槳葉載荷限制,包括槳葉失速和壓縮效應。文獻[5-6]針對傾轉旋翼-機翼飛行器的傾轉過渡走廊展開了研究,認為低速邊界為機翼失速限制邊界,高速邊界由功率限制。文獻[1,7]采用質點模型,從低速段包線和高速段包線2方面對傾轉旋翼機的傾轉過渡走廊展開研究,以機翼失速限制確定低速段傾轉過渡走廊邊界,以旋翼可用功率限制確定高速段傾轉過渡走廊邊界。但是由于傾轉旋翼機和傾轉旋翼-機翼飛行器的重心比較靠近旋翼短艙傾轉軸,旋翼和機翼氣動力對重心產生的俯仰力矩較小,因此傾轉旋翼飛行器只需考慮旋翼和機翼之間氣動力分配問題。但是傾轉四旋翼飛行器重心位于兩機翼之間,各氣動部件對重心產生的俯仰力矩更大,從而涉及到前后旋翼、前后機翼氣動力分配問題,導致傾轉四旋翼飛行器的傾轉走廊計算更加復雜。總之,基于質點模型的傾轉過渡走廊計算方法適合傾轉雙旋翼飛行器和傾轉旋翼-機翼飛行器,但不完全適合傾轉四旋翼飛行器。文獻[8]給出傾轉四旋翼飛行器的傾轉走廊,但沒包括分析方法。國內外鮮有關于傾轉四旋翼飛行器傾轉走廊研究的報道。到目前為止,還沒有具體的理論計算方法用來計算傾轉四旋翼飛行器傾轉走廊。
鑒于此,本文提出一種確定傾轉四旋翼飛行器傾轉過渡走廊的綜合方法。該方法從2方面開展研究,以機翼升力特性限制低速和高速邊界,以單旋翼可用功率限制高速邊界。
1 傾轉過渡走廊求解模型
傾轉四旋翼飛行器定常飛行時,作用在它上面的合力和合力矩必須為零。當飛行器有一定的前飛速度,就必須克服一定的阻力;為保持高度,垂直方向的力也必須始終保持平衡。此外,由于各個部件氣動力作用點不同,對重心會產生很大的力矩。圖1給出了作用在飛行器縱向對稱面內的外力。圖中:T1、T2、T3和T4分別為左前、右前、左后和右后旋翼的拉力;L1、L2、L3和L4分別為左前、右前、左后和右后機翼的升力;D1、D2、D3和D4分別為左前、右前、左后和右后機翼的阻力;LF為機身升力;DF為機身阻力;MF為機身俯仰力矩;G為飛行器重力;αf為機身迎角;V為前飛速度;Q1、Q2、Q3和Q4分別為左前、右前、左后和右后旋翼的反扭矩。
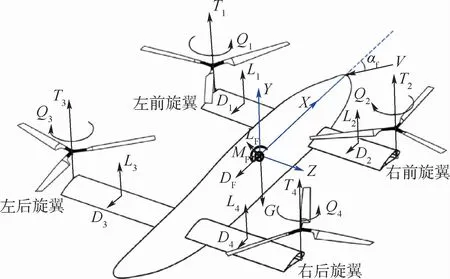
圖1 作用在傾轉四旋翼飛行器上的外力Fig.1 Forces acting on quad tilt rotor aircraft
根據圖1可得如下縱向平面內的力和力矩的平衡關系:
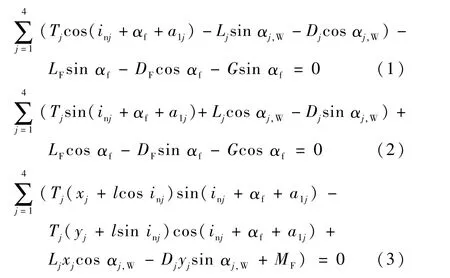
式中:j=1,2,3,4為旋翼機翼編號;xj和yj分別為對應編號的氣動部件相對重心的縱向和垂向坐標;l為槳轂到傾轉軸的距離;inj為對應編號的短艙傾轉角,直升機模式時為90°,固定翼飛機模式時為0°;αj,W為對應編號的機翼迎角;a1j為對應編號旋翼后倒角。
四旋翼傾轉飛行器有4個旋翼,為了考慮旋翼間的氣動干擾,前后旋翼之間的干擾可以參考縱列式直升機,引入前后旋翼的干擾因子[9-10]。
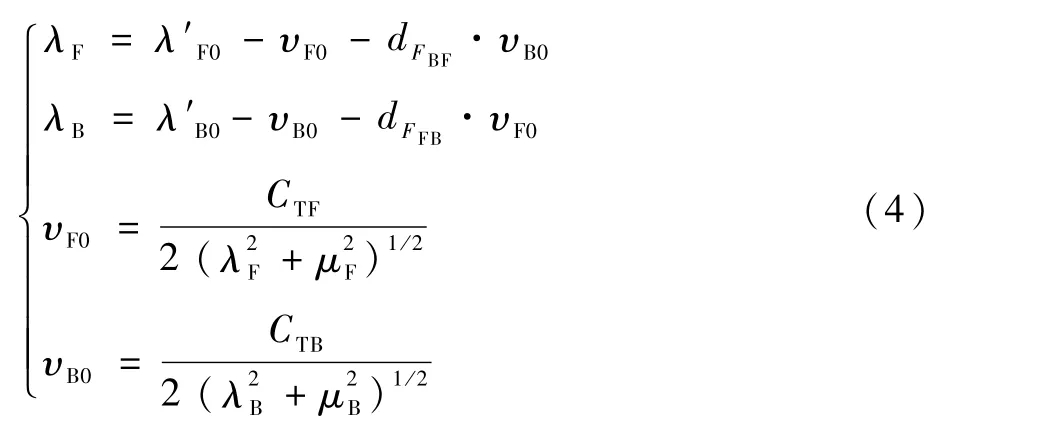
式中:λF、λB分別為修正后的前、后旋翼入流比;λ′F0、λ′B0分別為前、后旋翼自由來流入流比;υF0、υB0分別為前、后旋翼平均誘導速度;CTF、CTB分別為前、后旋翼的拉力系數;μF、μB分別為前、后旋翼前進比;dFBF和dFFB分別為后旋翼對前旋翼和前旋翼對后旋翼的干擾因子,可由經驗公式、實驗以及CFD計算得到。
左右旋翼之間存在并列效應[11-12],借鑒XV-15傾轉旋翼飛行器GTRS模型處理方式,左右旋翼誘導速度相互干擾修正量估算公式為
式中:XSS為左右旋翼并列效應系數,其大小由旋翼旋轉方向、兩旋翼之間的距離、前進比和旋翼迎角決定,具體數值應結合實驗測得;CT為旋翼拉力系數;κ=1-ctip/(2R)為槳尖損失系數,ctip為槳尖弦長,R為旋翼半徑;μ=Ut/(ΩR)為旋翼前進比,Ut為平行于槳盤平面的速度,Ω為旋翼轉速。
旋翼氣動力采用動量葉素理論、均勻入流模型以及準定常一階揮舞運動得到。
傾轉四旋翼飛行器在懸停和低速飛行時,由于旋翼在機翼上方,旋翼下洗氣流能改變機翼迎角以及相對來流速度,因此旋翼尾流對機翼氣動力 影 響 很 大[1,7,13-14]。旋 翼 對 機 翼 氣 動 力 影 響 大小由多因素決定[1,15]。為了準確建立計算模型,必須考慮旋翼對機翼的氣動干擾。文獻[1,7,16-20]把機翼面積分為2部分:一部分是受旋翼尾流影響的滑流區機翼面積SWss,另一部分是不受旋翼尾流作用的自由流區機翼面積SWfs。
機翼處于滑流部分的面積SWss和處于自由流部分的面積SWfs的計算公式分別為
2 限制條件
2.1 機翼升力特性限制
傾轉四旋翼飛行器在低速飛行時短艙進行傾轉,機翼可能失速,當高速飛行時進行傾轉,飛行器需低頭來增加旋翼氣動力水平分量來平衡飛行過程中產生的阻力。當飛行器低頭過大,機翼迎角可能低于零升力迎角,機翼產生負升力,此時,機翼成為一個負載,導致旋翼需用拉力陡增,此時飛行狀態非常危險,前飛過程應該避開此狀態。綜上所述,傾轉四旋翼飛行器飛行時應保證機翼迎角在安全區域內。機翼失速和機翼迎角低于零升力迎角分別對應機翼升力特性限制的上下限,而機翼迎角又與機體迎角αf直接相關,可通過式(10)最終確定安全機體迎角范圍,此范圍與傾轉四旋翼飛行器操縱方式無關。

式 中:αj,W_stall為 對 應 編 號 的 機 翼 失 速 迎 角,min(αj,W_stall)為取4者最小值;αj,W0為對應編號的機翼零升力迎角,max(αj,W0)為取4者最大值;ij,W為對應編號的機翼初始安裝角。
2.2 旋翼功率限制
與傾轉旋翼飛行器相比,傾轉四旋翼飛行器重心位于兩機翼之間,旋翼機翼氣動力對重心的俯仰力矩更大,從而涉及到前后旋翼、前后機翼氣動力分配問題,導致前后旋翼的需用功率不等。單旋翼可用功率限制邊界可以表示為
max(Prj)≤Pe(11)式中:Prj為對應編號的旋翼需用功率;Pe為單個發動機輸出的額定功率。
單個旋翼需用功率Pr可表示為

3 算例分析
運用上述方法對算例傾轉四旋翼飛行器開展傾轉過渡走廊計算。算例飛行器主要參數如表1所示,算例飛行器旋翼沒有周期變距,傾轉方式為四副旋翼同步傾轉。
3.1 計算流程
圖2給出了傾轉四旋翼飛行器傾轉過渡走廊的計算流程。機翼升力特性限制邊界計算流程是:首先給定原始參數及計算初值,其次以機體迎角特定值為優化目標,分別計算機體迎角-9°~10°范圍內的不同傾轉路徑。功率限制邊界計算流程是:設定傾轉角和飛行速度進行配平計算,算出4副旋翼需用功率,然后根據單個旋翼可用功率限制條件,得到算例樣機單個旋翼可用功率限制邊界。
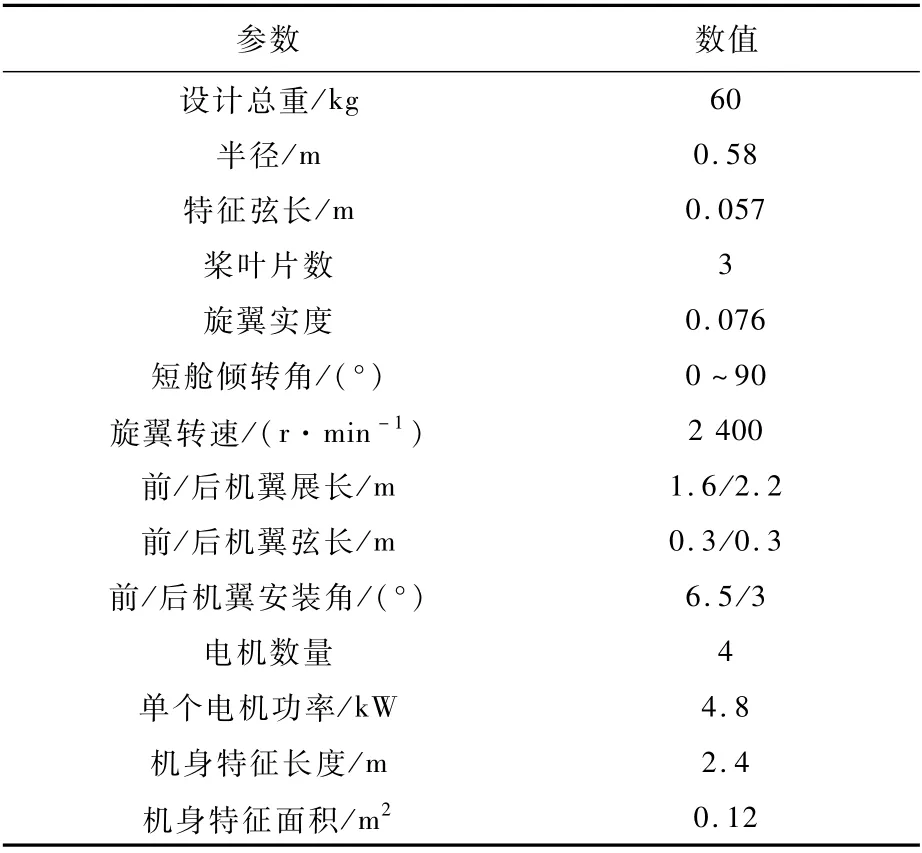
表1 算例傾轉四旋翼飛行器主要參數Table 1 Main parameters of example quad tilt rotor air craft
3.2 結果與分析
圖3給出了所建旋翼模型在懸停下的計算值和試驗值對比,可以看出旋翼模型精確度滿足要求。
圖4給出了安全機體迎角內,等機體迎角下短艙傾轉角隨速度的變化。可以看出,相同傾轉角下,機體從正迎角向負迎角過渡時,飛行器所需的速度越來越大,這是由于機翼迎角在減小,提供相同的升力所需的飛行速度越大。
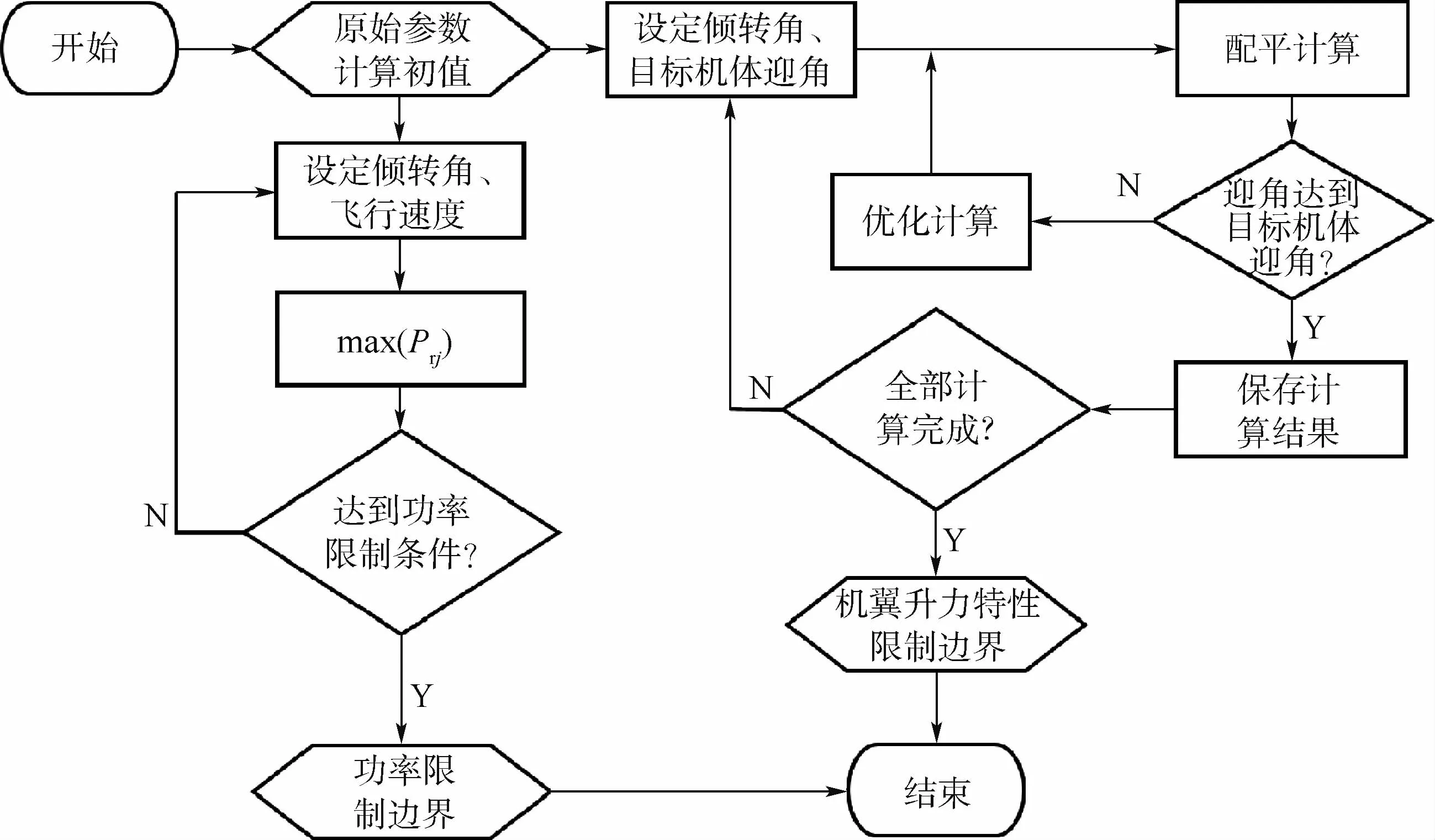
圖2 傾轉過渡走廊計算流程Fig.2 Flowchart for computing conversion corridor
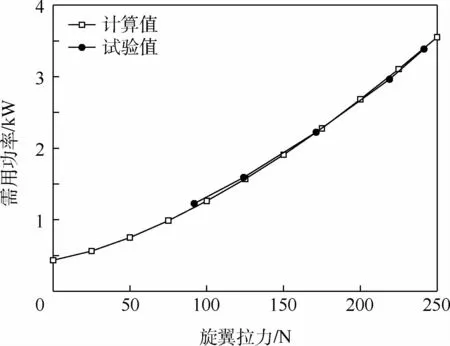
圖3 旋翼模型驗證Fig.3 Rotor model verification

圖4 等機體迎角傾轉時短艙傾轉角與前飛速度的關系Fig.4 Relation between tilt angle of nacelle and forward speed at constant angle of attack of fuselage
圖5~圖7分別給出了機體迎角為-6°、0°和10°下各氣動部件的氣動力隨速度的變化。飛行速度為0 m/s時,機翼產生負垂向力是由于旋翼對機翼產生氣動干擾。在傾轉過程中,旋翼氣動力水平分量在不斷增加而垂向分量在不斷減小最后到0,而機翼垂向力在不斷增加。機體迎角為-6°時,圖中最大速度對應的傾轉角為35°,可以看出后旋翼氣動力垂向分量比前旋翼氣動力垂向分量大,前機翼垂向力比后機翼垂向力大,這是由于機身產生了一個較大低頭力矩。機體迎角為0°時,前后旋翼氣動力垂向分量基本保持一致,前機翼的垂向力比后機翼垂向力略小。這是由于在前飛時,機體產生了一個較小的抬頭力矩。機體迎角為8°時,前旋翼氣動力垂向分量比后旋翼氣動力垂向分量小,后機翼垂向力比前機翼垂向力大,這是由于機體產生了一個較大的抬頭力矩。對比圖5~圖7中各氣動部件垂向力可以發現,前旋翼提供的垂向力占比隨機體迎角增大而增大;后旋翼提供的垂向力占比隨機體迎角增大而減小;前機翼提供的垂向力占比隨機體迎角增大而減小;后機翼提供的垂向力占比隨機體迎角增大而增大。
圖8和圖9分別給出了不同傾轉角,前、后旋翼需用功率隨飛行速度的變化曲線。可以看出,前飛狀態下需用功率隨著前飛速度增加先減小后增大,呈“馬鞍形”,這是由于隨著傾轉角的減小,前飛速度在逐漸增加,導致廢阻功率的增加。對比圖8和圖9可以發現,前后旋翼的需用功率不一致,這是由于飛行速度較大時,機身有較大的負迎角,導致后旋翼氣動力比前旋翼大,從而導致后旋翼需用功率比前旋翼需用功率大,并且在同一機體迎角下后旋翼需用功率先達到限制邊界。
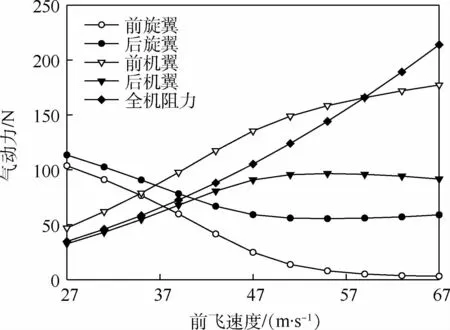
圖5 機體迎角為-6°時各氣動部件垂向氣動力隨前飛速度的變化Fig.5 Variation of vertical aerodynamic force of each pneumatic component with flight speed at-6°angle of attack of fuselage

圖6 機體迎角為0°時各氣動部件垂向氣動力隨前飛速度的變化Fig.6 Variation of vertical aerodynamic force of each pneumatic component with flight speed at 0°angle of attack of fuselage
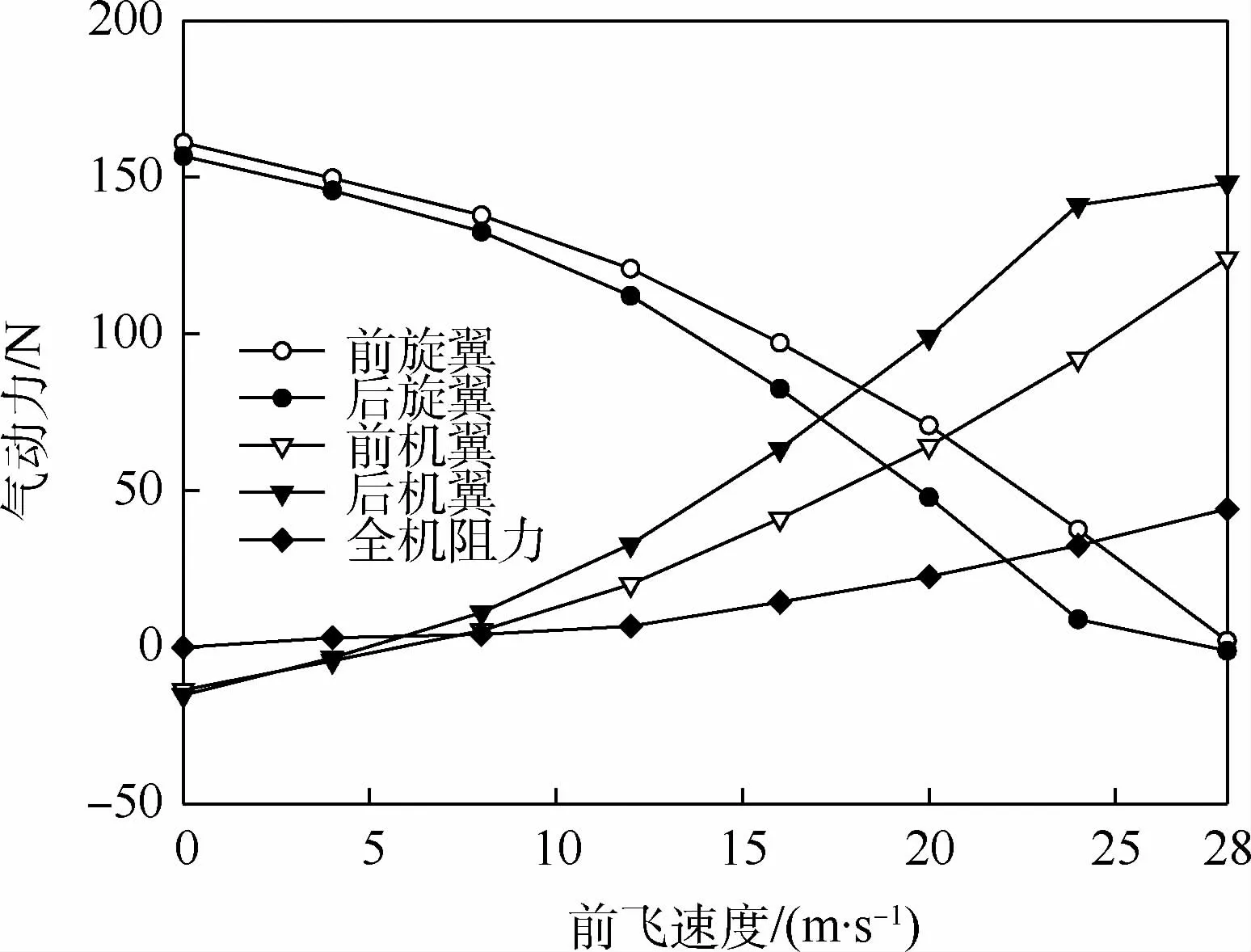
圖7 機體迎角為10°時各氣動部件垂向氣動力隨前飛速度的變化Fig.7 Variation of vertical aerodynamic force of each pneumatic component with flight speed at 10°angle of attack of fuselage
圖10給出各限制條件下的傾轉四旋翼飛行器的傾轉包線,可以看出,短艙傾轉角為0°時,最小和最大前飛速度分別為28 m/s和68 m/s。短艙為90°時,最大前飛速度為39 m/s,此時機身迎角為-9°。同時,傾轉四旋翼飛行器傾轉過渡走廊的高速邊界由機翼升力特性高速邊界和單旋翼功率限制邊界共同組成。就傾轉四旋翼飛行器而言,單旋翼功率限制邊界一定比總功率限制邊界更嚴格。

圖8 等短艙傾轉角時前旋翼需用功率隨前飛速度變化Fig.8 Variation of required power of front rotor with flight speed at constant tilt angle of nacelle
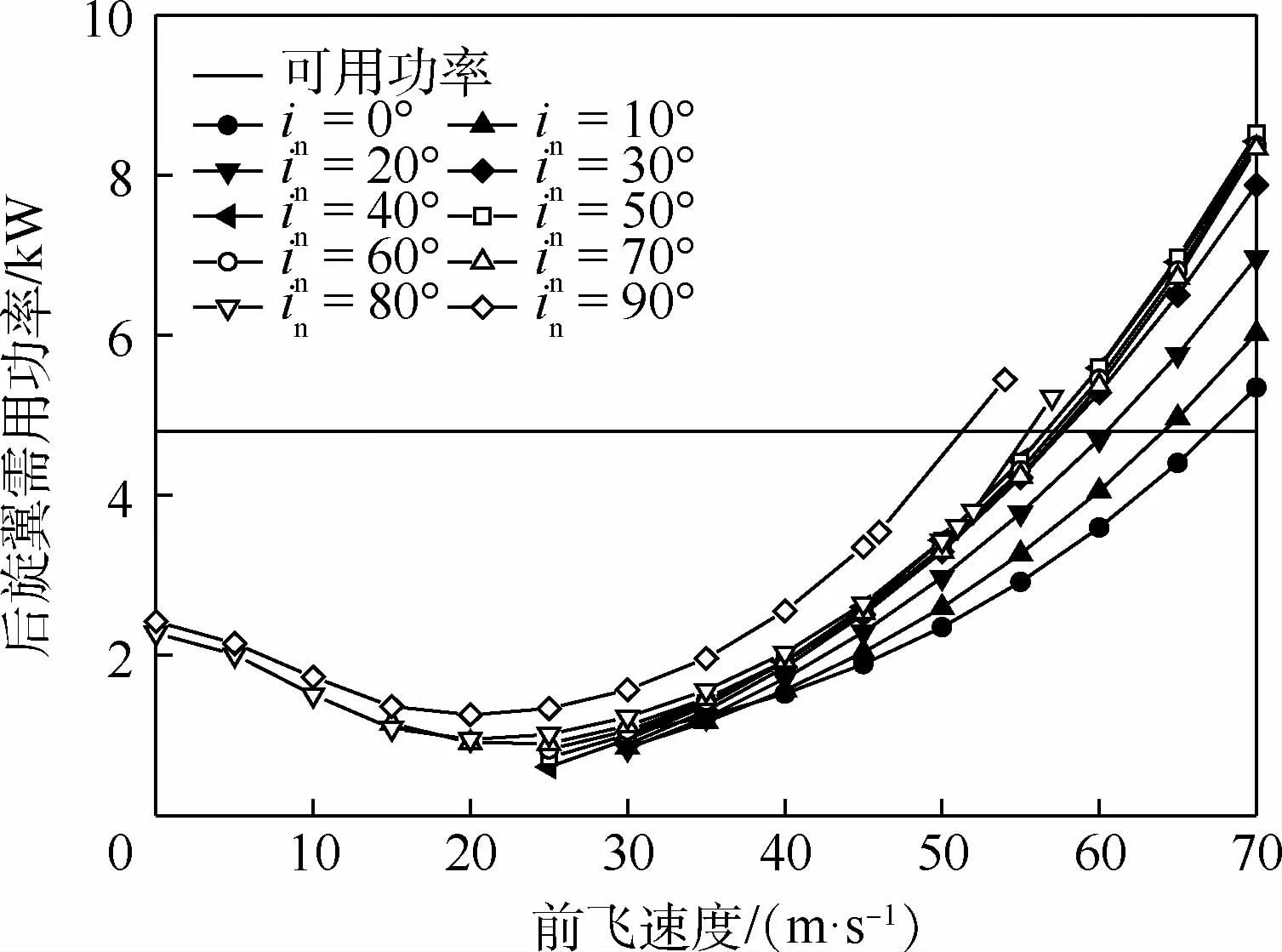
圖9 等短艙傾轉角時后旋翼需用功率隨前飛速度變化Fig.9 Variation of required power of rear rotor with flight speed at constant tilt angle of nacelle
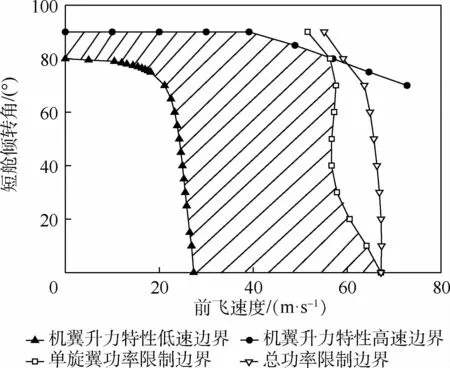
圖10 算例飛行器的傾轉過渡走廊Fig.10 Conversion corridor of example aircraft
4 結 論
1)傾轉四旋翼飛行器可以以不同的機體迎角進行傾轉,但為了充分發揮前后旋翼的性能應盡可能保證前后旋翼需用功率一致,傾轉四旋翼飛行器在小機體迎角下傾轉優于在大機體迎角下傾轉。
2)前旋翼提供的拉力占比隨機體迎角增大而增大;后旋翼提供的拉力占比隨機體迎角增大而減小;前機翼提供的拉力占比隨機體迎角增大而減小;后機翼提供的拉力占比隨機體迎角增大而增大。
3)傾轉四旋翼飛行器傾轉過渡走廊的高速邊界由機翼升力特性高速邊界和單旋翼功率限制邊界共同組成,單旋翼功率限制邊界比總功率限制邊界更嚴格。
4)本文方法通用于有周期變距和異步傾轉的傾轉四旋翼飛行器。