物流無人機PID控制研究
2021-01-08 02:16:42陳鵬李子卓李陳龍宋昊銘吳心雨遲英姿
無線互聯科技 2021年23期
陳鵬 李子卓 李陳龍 宋昊銘 吳心雨 遲英姿




摘 要:當今物流行業發展迅速,無人機技術日趨成熟。文章對網聯化、智能化新型物流配送方式展開探究,研究了無人機的PID調試方案,分析了無人機不同起飛重量下的飛行姿態,優化特種無人機的姿態控制及其產品的實用性。
關鍵詞:PID;無人機;物流;改裝
1 物流無人機的發展現狀
無人機技術日趨成熟,無人機的應用逐漸廣泛,物流行業快速發展過程中,無人機的優勢也逐漸顯現出來。
本項目應用于物流需求,為確保能夠快速準確地將貨物送達目標位置。對配送流程進行優化[1],縮短貨物送達時間。相對于地面物流系統,在配送時間、環節、人力成本等方面得到明顯優化,從而提高總體配送效率。兩者配送流程對比如圖1所示。
2 無人機硬件參數
無人機采用六旋翼無人機[2],軸距850 mm,電機采用? ? ? ?3 510 360 kv,旋翼尺寸1 555 mm,電池選用6 s 16 000 mAh,空重3.36 kg,最大載重4.2 kg,物流箱容量29 L。
3 物流無人機的PID控制
3.1 物流無人機的PID調試方案與分析
多旋翼無人機PID 是控制無人機飛行姿態的重要參數,其作用是消除飛行器輸出值在理論值與實際值之間的誤差值。本文使用MP地面站對六軸無人機進行可視化PID調整。
PIXHAWK飛控采用串級PID的方式[3],外環PID控制角度,內環PID控制角速度。內環PID更直接作用于電機,所以在多旋翼無人機姿態調試中,一般只調試內環PID。
P比例可以理解為修正力度,P值越大則修正力度越大,系統響應速度越快,P值過大也會導致系統振蕩失調。D微分的作用可以理解為剎車,在系統即將恢復至目標值時降低修正力度,以減少系統修正次數,使系統快速達到穩定。I積分的作用是消除靜態誤差,以使系統處于穩態時不振蕩。
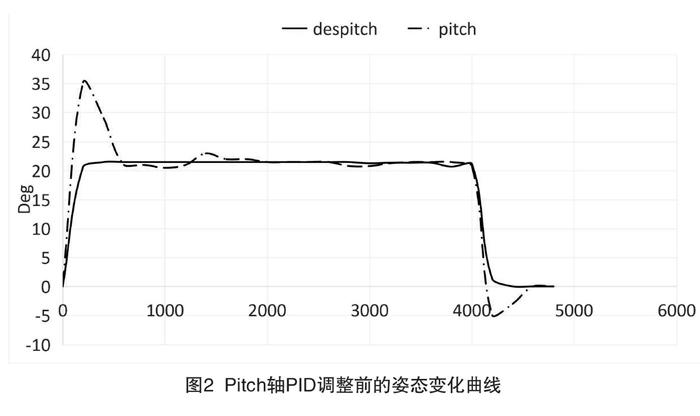
通過對無人機ATT數據分析,得到無人機Pitch軸在PID調試前的姿態變化,如圖2所示。由圖2可知,PID調整前,Pitch軸的實際值與期望值誤差較大,無人機飛行姿態不穩定。
為了達到無人機穩定飛行的目的,PID的整定過程通常需要經過多次調試。本文六軸無人機的PID具體整定方案為:
(1)將P比例、I積分、D微分降低至最小值,逐步增加P值,每次增加0.002,直至系統出現不衰減振蕩,降低P值0.002,直至系統出現衰減振蕩。
(2)保持P值不變,逐步增加D值,每次增加0.001,可觀察到系統的衰減振蕩次數逐步減少,直至系統出現振蕩,降低D值0.001,直至系統不振蕩。
(3)保持P比例、D微分不變,逐步增加I值,每次增加0.002,直至系統與期望值靜態誤差降至最低。
(4)根據無人機飛行姿態,對P值、I值、D值進行微調,直至系統穩定,無人機飛行姿態良好,完成PID整定(見圖3)。
3.2? 不同起飛重量下姿態對比
因物流無人機載重變化,在不同起飛重量下,PID有差異,需整定PID適應不同起飛重量,對比不同起飛重量PID在不同載重時飛行姿態的差異,可參考 PID曲線分布等級表(見表1)。
由表2分析得,4 kg PID在無人機空載時處于超調狀態,飛行狀態極不穩定。對各組PID在不同載重情況下的數據對比,2 kg PID在各載重下飛行狀態良好。
4 結語
本項目主要提出了一套關于六旋翼物流無人機PID的調試方案,并對不同載重情況下的PID數據進行了對比。該項目有助于優化特種無人機的姿態控制及其產品的實用性。具體結論如下:
(1)闡述了P比例、I積分、D微分在無人機姿態控制中的具體作用,并且針對其特性,提出了一套切實可行的調整方案。
(2)對于物流無人機的不同起飛重量,進行了多組PID在不同起飛重量下的數據對比,并得出了一套相對穩定的PID數值。
[參考文獻]
[1]劉正元,王清華.無人機在應急物流配送中的任務分配模型構建[J].科技管理研究,2020(24):229-236.
[2]胡瑞,許春霞,熊樂,等.三軸矢量無人飛行器的創新設計與研究[J].機械設計與研究,2020(5):54-59.
[3]趙潔,陳至坤,張瑞成.基于串級PID的多旋翼精確定點懸停控制研究[J].電光與控制,2021(5):1-6.
(編輯 姚 鑫)
Research on PID control of logistics UAV
Chen Peng, Li Zizhuo, Li Chenlong, Song Haoming, Wu Xinyu, Chi Yingzi
(Institute of Automotive Engineering, Pujiang College of Nanjing University of Technology, Nanjing 211100, China)
Abstract:Nowadays, with the rapid development of logistics industry, UAV technology is becoming more and more mature. This paper explores the networked and intelligent new logistics distribution mode, studies the PID debugging scheme of UAV, analyzes the flight attitude of UAV under different takeoff weight, and optimizes the attitude control of special UAV and the practicability of its products.
Key words:PID; drone; logistics; modification
猜你喜歡
物流技術與應用(2020年11期)2020-03-11 03:11:36
汽車觀察(2018年12期)2018-12-26 01:05:44
消費導刊(2018年8期)2018-05-25 13:20:16
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業導報(2016年9期)2016-05-26 20:58:26
現代企業(2015年2期)2015-02-28 18:45:09
商界(2014年12期)2014-04-29 00:44:03
物流科技(2011年12期)2011-06-15 01:29:56
