基于模糊神經網絡的導航數據融合算法仿真設計
2021-01-11 09:29:32張群芳
科教導刊·電子版 2020年33期
張群芳
(沈陽理工大學自動化與電氣工程學院 遼寧·沈陽 110159)
0 引言
導航系統各個傳感器及信息處理平臺,能夠接受、融合并處理各類導航數據,導航數據具有明顯的異構性。導航系統具有全天候、高精度、多功能等優點,在測角、測距、測速時,需要避免由多路徑引起的觀測誤差和融合誤差。如何提高數據的融合精度,是保證導航系統服務的關鍵。傳統的模糊神經網絡可實現無監督或監督學習,大大增加了及時性,但在融合大量異構數據時,容易造成局部最優,使得整體融合結果不準確。此外,導航數據融合需要對異構數據進行排序傳輸到置信鏈上,通過對數據屬性的分析得到新的信息,并用于下一個融合節點的再次分析。異構數據的復雜性,導致融合處理信息時間過長,故異構導航數據融合需要根據實際情況選擇一種或者幾種算法組合的模式。因此,本文基于自適應模糊神經網絡,利用粒子群優化參數學習,為導航系統接收的異構數據進行屬性和特征值劃分,對預處理過的數據進行有效融合,保證融合的收斂速度和準確性。
1 導航數據融合模型
導航數據融合模型采用分布式結構,如圖1所示。導航系統信息中心接受目標區域中的異構導航數據,經過濾波預處理及時空配準后,導航數據進入融合中心進行數據融合輸出。

圖1:導航數據融合模型
2 基于模糊神經網絡的粒子群優化優化算法設計
模糊理論和神經網絡算法是目前應用較廣兩種融合算法,本文綜合兩種算法的優勢,采用模糊系統和BP神經網絡組合的自適應模糊神經網絡對異構數據的融合。基于BP神經網絡構成的自適應模糊神經網絡,其模糊規則滿足:

針對模糊神經網絡參數學習對融合速度和精度的限制,本文設計一種粒子群學習算法來優化異構導航數據融合指標。粒子群學習算法如下:
假設在n維空間中,種群規模為m的粒子群X為
按照追隨當前最優粒子原理,第i個粒子在第j個維度空間中的速度與位置分別滿足

全局誤差為

其中,pij為個體極值;pgj為全局極值;t為進化代數;r1和r2為隨機數,取值范圍滿足[0,1]區間;c1和c2為加速常量。
該優化算法通過調節全局最優粒子和個體最優粒子飛行的最大步長,使得全局誤差最小,即保證粒子快速趨向全局最優。
3 基于模糊神經網絡的粒子群優化優化算法仿真分析
選用3種異構導航數據,分別作為目標的距離、速度和角度,在目標運動的30s內選擇100組數據進行仿真分析。目標的初始距離為(3500,4000),初始速度為(25,0.1),初始角設為30°。新算法下,導航數據的融合誤差仿真結果如圖2所示。

圖2:導航數據的融合誤差
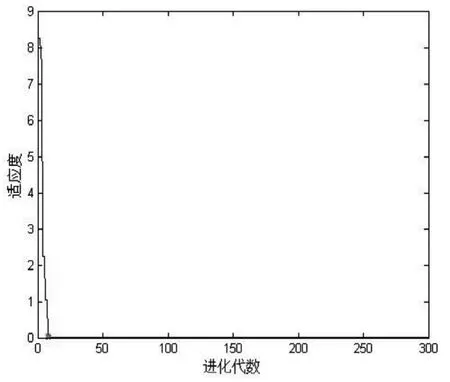
圖3:粒子群算法最優個體適應度
由圖2可以看出,在100次的粒子群參數學習中,隨著學習次數的增加,誤差逐漸趨于平緩,融合誤差的方差約為0.51,可有效實現對導航數據的聚類融合。由圖3可以看出,新算法尋優在12次迭代后可滿足最優個體適應度,即搜索到空間最優個體。綜合可知,新算法可降低融合誤差,提高融合精度,減小學習迭代次數,增加收斂速度,滿足導航數據的實時性,提升對導航目標的動態預測能力。
4 結論
為有效提高導航數據的融合精度和融合速度,本文基于自適應模糊神經網絡設計了一種粒子群優化算法,并對該算法進行仿真驗證。結果表明,新算法能夠有效降低數據融合誤差,提高參數學習速度,新算法適合在動態、多目標環境中快速尋優。
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
房地產導刊(2022年5期)2022-06-01 06:20:14
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
無線電工程(2020年11期)2020-10-29 01:25:46