無人機高功率密度變換器設計
2021-01-12 03:55:04劉小涵劉希軍
無線互聯科技 2020年24期
劉小涵,彭 旭,劉希軍
(中國民用航空飛行學院,四川 廣漢 618307)
0 引言
隨著科技的快速發展,隨著平臺、算法、交互方式的不斷更新和突破,人工智能技術也逐步走向成熟,涉及的領域也逐漸具體化、民用化[1-3]。無人機作為一種高科技產品越來越受到人們的喜愛,目前在航拍、農業、自拍、快遞運輸、災難救援等領域起著至關重要的作用,這也大大地拓展了無人機的市場[4-5]。
伴隨著無人機應用領域的不斷延伸,如何進一步減小無人機的體積和提高充電效率也成了近幾年的研究重點,為了使無人機有更好的續航里程,有學者提出了選用儲能密度更高的鋰電池作為無人機的供電單元,同時鋰電池的體積也相對小很多[6-8]。無人機充電的效率主要依靠其中的DC-DC變換器的效率,同時減小變換器的體積對進一步減小無人機的體積也起到確定性作用,因此研究一個高功率密度的無人機充電用變換器顯得相當重要[9-10]。
1 無人機變換器的拓撲結構設計
1.1 隔離與非隔離型拓撲選擇
根據變換器結構中是否有變壓器進行電氣隔離,可以將傳統的DC-DC變換器分為隔離型變換器和非隔離型變換器兩種類型。
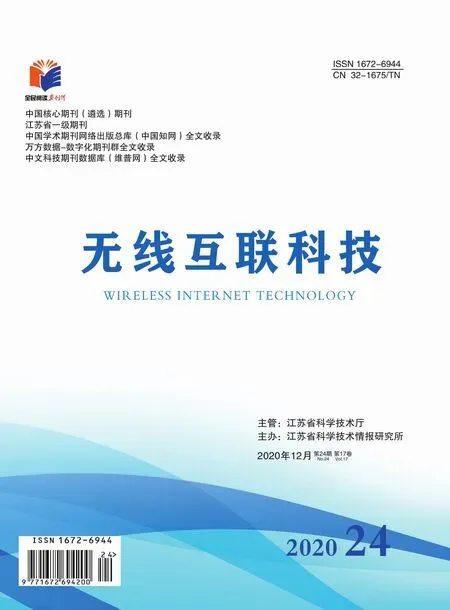
在無人機充電系統中,一般采用降壓型變換器,降壓至15-18V才能給無人機的電池充電,所以要求降壓比很大的變換器。非隔離型變換器適用于升降壓范圍比較小的情況,對于這種降壓較高的情況應該選用隔離型變換器。通過對比發現正激式和反激式拓撲電源側不連續,諧波含量大;推挽式拓撲對變壓器繞組的利用率太低、對功率開關管的耐壓能力要求比較高;半橋式拓撲中半橋式開關電源會出現半導通區,損耗大。相比之下全橋式拓撲具有很明顯的優勢:開關管應力相對較小,鉗位或體二極管回路結構便于磁復位和尖峰抑制,有助于提高變換器整體效率,容易實現軟開關等,因此針對無人機降壓變換器應該選用全橋結構。全橋變換器拓撲如圖1所示。
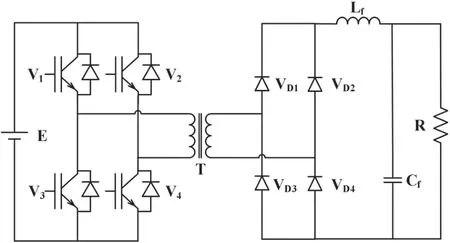
圖1 全橋變換器拓撲
1.2 驅動結構選擇
針對全橋變換器的驅動部分本文選擇了控制簡單,容易實現軟開關的移相控制。移相控制的工作原理是:位于同一橋臂上的兩個開關管導通角差180°,位于對角線上的兩個開關管導通角相差一個角度,即所謂的移相角,當輸入電壓變化時,要求輸出電壓還是穩定在要求的電壓值時,就可以通過對移相角的調節來完成。移相控制原理如圖2所示。
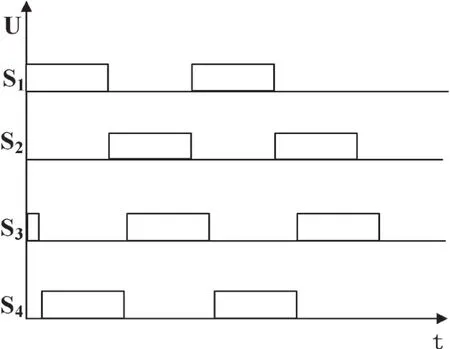
圖2 移相控制原理
軟開關分為零電壓開關(ZVS)、零電流開關(ZCS)和零電壓零電流開關(ZVZCS)3種。零電壓全橋軟開關變換電路由于原邊有較大的環流,副邊占空比丟失比較大,這種占空比的丟失會使整流二極管的電壓應力增加,由于滯后橋臂實現零電壓軟開關的范圍與輸入電壓和負載兩個因素有關,所以在輕載時零電壓軟開關會比較難實現。因此本文設計的變換器采用ZVZCS軟開關技術,設計的變換器的拓撲結構如圖3所示。
圖3 設計的變換器的拓撲結構
2 無人機變換器的控制策略設計
針對降壓變換器的基本控制電路有電壓閉環模式和電流閉環模式。電流閉環是將輸出電流作為閉環控制系統輸入的方式。電流模式最大的優點就是系統響應很快,但是涉及對主電路中電感電流的采集,使得實際實現電流閉環相對復雜且成本昂貴。同時還需要增加斜坡補償模塊,加大了設計難度。針對本文設計的無人機降壓變換器,本文采用雙閉環控制策略,它包括內環控制和外環控制兩種系統,外環是對電壓控制,內環是對電流控制。整體控制框如圖4所示。
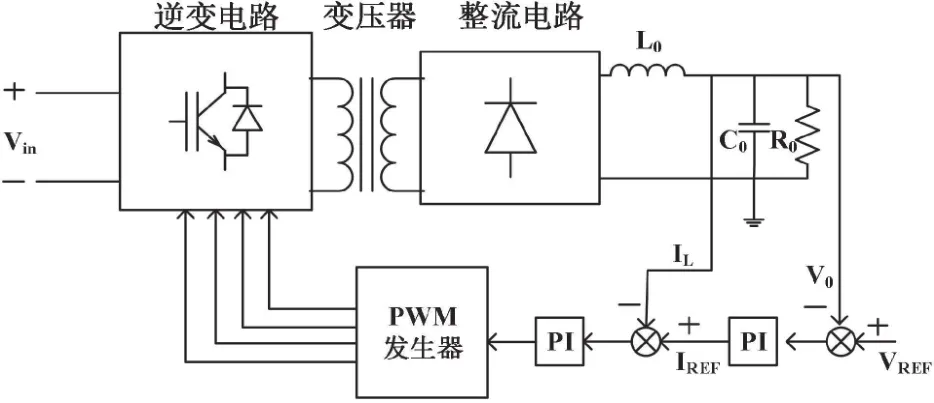
圖4 無人機降壓變換器的控制框
3 仿真分析
圖6所示為仿真波形分析,可以看出無人機電池接入變換器后波形穩定。

圖5 電池接入變換器過程輸出側電壓電流波形
4 結語
本文主要針對現有無人機用降壓變換器存在的效率低、體積大、重量重等缺點,設計了高功率密度的DC-DC變換器,能夠較大程度地滿足小型化、輕量化、高功率密度、高效率的要求。并且通過仿真結果驗證了所設計的無人機降壓移相全橋變換器的主電路結構、參數設計和電壓電流雙閉環控制策略滿足要求。
猜你喜歡
甘肅教育(2020年14期)2020-09-11 07:57:42
現代裝飾(2020年7期)2020-07-27 01:27:42
中學生數理化(高中版.高考數學)(2020年5期)2020-06-02 09:19:08
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
商周刊(2017年9期)2017-08-22 02:57:49
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
時代英語·高二(2015年1期)2015-03-16 00:08:11
中國衛生(2014年11期)2014-11-12 13:11:32