
便攜式軟體康復手套的研究
2021-01-12 10:50:02黃庭威
機電工程技術 2020年11期
黃庭威,石 琛
(1.中南大學機電工程學院,長沙 410083;2.中南大學高性能復雜制造國家重點實驗室,長沙 410083)
0 引言
軟體機器人是當下研究的熱點,如今軟體機構在醫療康復設備和軟體機械手上有廣泛的應用。本設計屬于醫療康復機械,是一款用于手部運動康復功能的軟體機器人設備。很多疾病及外傷都會使病人的手部運動功能喪失,手部的受傷會給患者的日常生活帶來極大的不便。醫學證明,可以通過肢體訓練,恢復患者的肢體損傷,防止肌肉萎縮。手部外骨骼機器人可以減輕患者的生活不便,促進患者的手部肢體功能性康復。本設計可以讓患者隨身攜帶,做到輕量化,具有很高的便攜性,具有重要的意義。
目前手部康復設備已經有一定的研究,取得一些成績,圖1(a)所示為東京工業大學開發的雙向運動的手部康復設備,結構復雜[1]。裝置的執行器是直線式氣動肌肉,每根手指有一個執行器。圖1(b)所示為美國科研人員Wege A發明的線驅動的康復機械手[2],通過鋼絲繩的拉伸驅動手指的伸展運動。
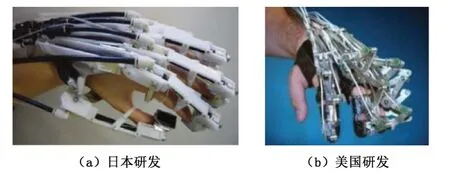
圖1 手部康復設備
圖2 所示為香港理工大學和香港中文大學合作研制的中風手指康復設備[3],結構同樣復雜。通過電機控制驅動掌故關節和指骨關節的運動,可用肌電信號控制。圖3 所示為德國FESTO 研制的手部康復機器人設備Exo-Hand,采用氣動控制,手指背側的外骨骼連桿體積很大,手指的靈活性受很大的影響[4]。

圖2 港理工與港科的中風外骨骼機器人

圖3 Exo-Hand機器人
本文針對目前手部康復設備笨重、結構復雜的特點,設計一款便攜性軟體康復機器人。該機器人可以根據患者手指長度調整軟體手指的尺寸,通過氣動驅動軟體手指的方式使得患者可以完成屈伸、抓取物體等動作,完成對手部患者的康復訓練。
1 總體方案設計
該款軟體康復設備的設計主要包括軟體手指、硬件電路、氣動驅動回路、控制程序4個部分。通過嵌入式編程控制硬件電路驅動氣泵和閥,實現對驅動系統的控制,驅動系統將電能轉換為氣體的壓力能,驅動軟體手指,如圖4所示。

圖4 總體方案框圖

圖5 人手關節示意圖[5]
2 軟體手指設計及Abaqus仿真
本文對于軟體手指的設計,首先分析人手骨骼結構,查閱醫學文獻,得到手部手指的數據,如圖5所示。根據指骨尺寸調整軟體手指的尺寸,對于設計結果,通過Abaqus仿真驗證其合理性。
成年后,人體手指指骨的長度都穩定在一個范圍內。人體的手指骨骼又分為近指骨、中指骨、遠指骨。指骨與指骨之間相連形成關節,關節之間通過肌肉進行驅動,而骨骼起到支撐的作用。表1所示為成年人手指指骨長度[5]。

表1 成年人手指指骨長度mm
根據指骨的長度,設計軟體手指關節的尺寸,使用Solidworks對軟體手指進行建模。軟體手指的基本結構是一個中空的腔體[6],在指骨關節設置氣室,在底層黏貼限制伸長的布層,在氣壓驅動下,氣室膨脹迫使手指彎曲。手指的制作需要通過硅膠澆注,由于氣室是中空結構,無法一次澆注完成,需要分成上、下2部分分別澆注再用膠水貼合密封。軟體手指結構圖如圖6所示。

圖6 軟體手指結構圖
為驗證軟體設計的合理性,使用Abaqus軟件進行變形有限元分析,如圖7 所示。分析時,材料定義為Ecoflex 硅膠,使用Yeoh五參數能量密度模型。假設材料各項同性,軟體手指的網格劃分使用實心四面體二次雜交元(C3D10H 單元類型)建模[7]。表2所示為Yeoh能量密度模型系數[8]。

表2 Yeoh能量密度模型系數
負載為作用在軟體手指內腔上及其連通孔的均布負載。圖8所示為不同氣壓下各指骨的相對基指骨的彎曲角度。可以看出,軟體手指達到預期要求。軟體手指只在關節處彎曲,手指彎曲時,實現屈伸動作。0~0.14 MPa的范圍內,關節彎曲角度隨氣壓壓強增大而增大。

圖7 軟體手指變形仿真
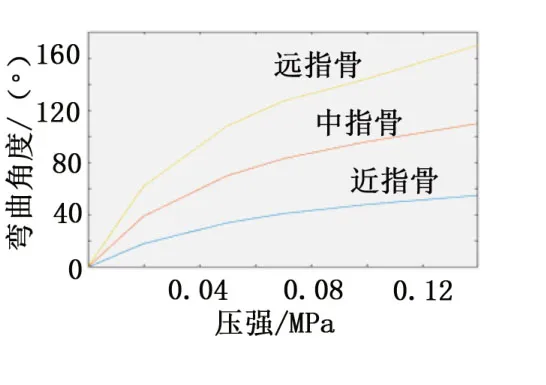
圖8 不同壓強下指骨的彎曲角度
3 軟體手指運動空間分析
采用D-H法對軟體手指進行運動學建模和分析。在手指關節連接點建立相對坐標系xijyijzij,其中,i=1,2,3,4,5分別為拇指、食指、中指、無名指和小指;j=1,2,3,4 為各手指關節點。圖9所示為軟體手坐標系[9]。

圖9 軟體手坐標系
D-H法由L、d、α、θ4個參數組成,L為桿件長度,d為x 軸方向兩坐標系的長度,α為桿件轉角,θ為x 軸繞y 軸旋轉到z軸的角度。表3所示為D-H系數。

表3 D-H系數
建立手指關節轉換矩陣,手指上的任意關節的坐標,都可以通過關節變換得到:

4 硬件電路設計
對于便攜式康復手套設備的硬件電路,采用Altium Designer 軟件設計原理圖和繪制PCB 文件。主要闡述對MCU 的選擇、氣泵電機驅動電路和電磁閥電路的設計。
硬件電路的MCU選用恩智浦公司的K60控制器,型號是MK60DN512VLL10。該單片機采用Cortex-M4內核[10]。Flash內存為512 kB。MK60DN512VLL10 擁有豐富的模塊,DSP、NVIC、SysTick、SCB、MPU、FPU 等。K60 控制器在電機控制、汽車電子、電源管理、嵌入式音頻和工業自動化上具有廣泛的應用。

圖10 MK60DN512最小系統
對于氣泵電機驅動的控制策略是H 橋驅動,采用N 溝道MOSFET 和專用柵極驅動芯片。柵極驅動芯片采用國產芯片FD8266,每塊該類芯片可以構建3個半橋驅動,通過4個N 溝道MOSFET構建H橋[11]。如圖11所示。

圖11 柵極驅動芯片FD8266
電磁換向閥,本質就是一個繼電器。由于單片機的拉電流和灌電流較弱,驅動能力差,在驅動繼電器這種大功率器件的時候,可以使用三極管。在繼電器線圈兩端反向并聯抑制二極管,以吸收線圈斷電時產生的自感電動勢[12]。如圖12所示。

圖12 繼電器控制電路

圖13 充氣、保持、放氣3種狀態
5 氣動驅動系統
本設計軟體手指的驅動方式為氣壓驅動。氣動驅動系統由氣泵、電磁換向閥和軟管組成。對氣路回路,首先需要設計可以保持充氣、放氣和保持3種狀態,通過兩位兩通閥與兩位三通閥的組合可以實現這3種狀態[13]。如圖13所示。
采用直流電機驅動氣泵,軟體手指抓取物體時,拇指需要更大的驅動,所以拇指軟體手指需要單獨一個氣泵驅動,而食指、中指和無名指、小指用一臺電機驅動,如此,可以使資源更合理分配,減輕重量,更具便攜性。如圖14所示。

圖14 氣動驅動系統
6 控制策略
在控制策略上,首先從患者的手部獲取表面肌電信號,整流濾波后獲得系統輸入量,通過PID 計算后得到控制量,單片機產生PWM 波控制電機轉速從而控制驅動回路的氣壓。產生響應后,氣壓傳感器和壓力傳感器產生響應的氣壓值和壓力值完成反饋。按鍵電路和OLED顯示屏的組合可以實現對系統參數的修改,以及系統狀態的顯示。如圖15所示。
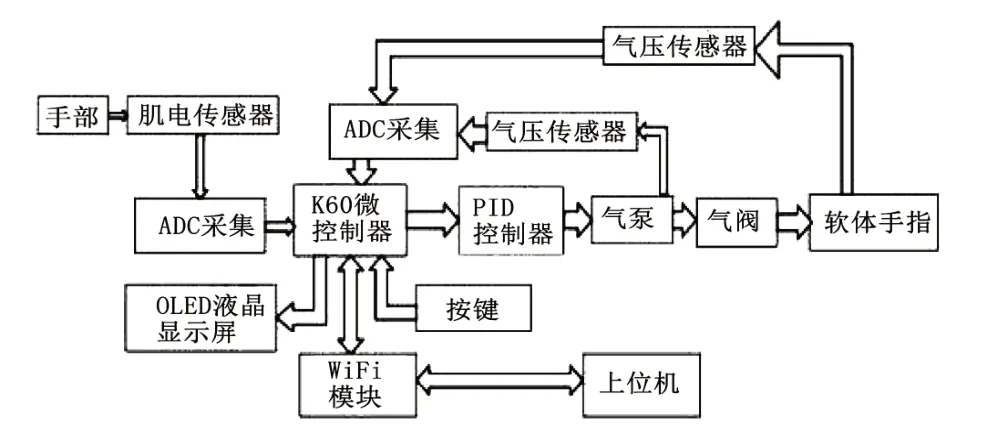
圖15 系統控制框架
肌電信號是一維動作電位序列,為交流信號,有效頻段在于0~500 Hz,如今市面已經集成肌電信號采集板,對肌電信號進行放大濾波餡波處理[14]。如圖16所示。
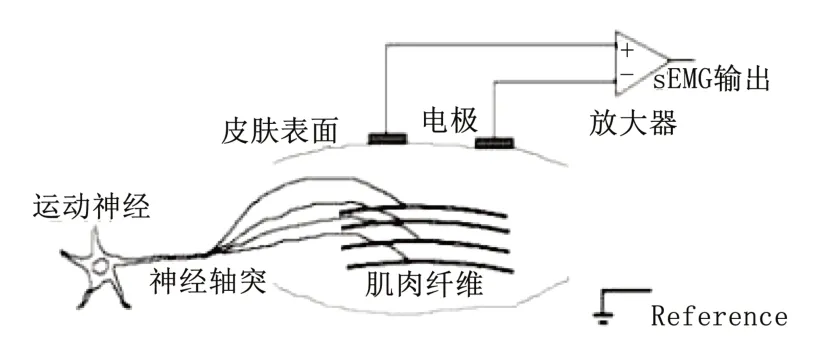
圖16 sEMG肌電信號
由于肌電信號是微弱的電信號,容易受到心電信號的影響和傳感器本身的干擾,在硬件濾波外,還可以采用軟件卡爾曼濾波,進一步降低干擾,卡爾曼濾波是通過狀態量的估計值和實際值之間的均方誤差的最小準則來實現的。基于這種準則,使得狀態量的估計值越來越接近實際值。卡爾曼濾波的數學方程分為預測方程和更新方程[15]。
預測方程:

更新方程:

通過一個簡單的驗證就可以看出卡爾曼濾波的效果,假設一個質點進行勻速的直線運動,然后引入一個非常大的噪聲,再用卡爾曼濾波對質點的運動狀態進行濾波處理。如圖17所示。通過Matlab計算可得,經過若干次迭代,濾波效果非常明顯。
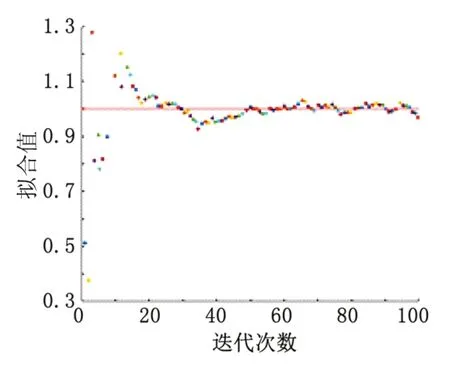
圖17 卡爾曼濾波Matlab驗證
對于系統控制,設置氣壓內環與壓力外環,氣壓內環可以監控氣動回路氣壓的最大值,防止氣壓過大造成軟體手指破裂。由于壓力外環只有在患者抓取物體接觸時才產生反饋,加入氣壓內環可以讓系統反應更靈敏、快速,能夠消除擾動,系統調節更迅速,降低偏差。如圖18所示。
對于系統外環,可以檢測患者抓取時的合適力度,保證平穩抓取。

圖18 系統控制原理圖
7 設備便攜性評估
目前市面上康復設備存在機構笨重、便攜性低等問題,本文設計一種基于Cortex-M4 微控制器的便攜式軟體康復手套,設備體積小、重量輕,大大提高了便攜性,非常有利于患者的手部康復。康復手套配套的控制箱,其各模塊的質量如表4所示。整一套設備的整體質量可以控制在5 kg以內,可以通過肩帶佩戴在背部,隨身攜帶,具備很高的便攜性。如圖19所示。

表4 主要硬件模塊質量

圖19 設備三維圖
8 結束語
目前手部軟體康復手套的研究已經取得一些成績,但其結構復雜、便攜性差、價格昂貴。針對這種情況,本文設計一種基于Cortex-M4微控制器的便攜式軟體康復手套,設計軟體手指結構并通過Abaqus有限元仿真驗證合理性,設計硬件電路繪制PCBb板,設計氣動驅動系統和控制系統。本設計具備便攜性好、價格低等特點,具有很大的發展前景。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:26:08
特別健康(2018年2期)2018-06-29 06:13:44
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
工業設計(2016年12期)2016-04-16 02:52:00
中國衛生(2014年6期)2014-11-10 02:30:50
消費者報道(2014年7期)2014-07-31 11:23:57
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:33:14
