智能網聯汽車云控系統及其實現*
2021-01-13 11:13:52李克強常雪陽李家文高博麟潘濟安
汽車工程 2020年12期
關鍵詞:融合
李克強,常雪陽,李家文,許 慶,高博麟,潘濟安
(1. 清華大學,汽車安全與節能國家重點實驗室,北京 100084;2. 啟迪云控(北京)科技有限公司,北京 100084)
前言
自動駕駛是汽車與交通領域的顛覆性技術,正引發學術界和工業界開展廣泛且深入的研究。單車自動駕駛的實現面臨不可逾越的技術瓶頸,而基于新一代信息與通信技術的智能網聯汽車(intelligent and connected vehicles,ICVs)[1]能有效解決其技術難題,并產生新的汽車交通系統形態。研發和應用智能網聯汽車系統,不僅需要常規車路協同和車聯網信息服務技術,還必須探索實現人、車、路、云的深度融合和系統重構,以面向各種場景進行復雜系統的融合感知、決策與控制。
在車路協同領域,有研究實現了路側設備輔助或車車通信下的高速公路編隊自動駕駛與多種輔助駕駛[2-4],然而這些技術沒有考慮云端平臺,由于分散架構下路側設備性能與協作能力的局限,其難以對全域智能網聯汽車的運行進行整體優化。在車聯網云服務領域,最初關注點為提供管理與信息服務,有基于公共平臺[5]與基于自組織網絡[6-7]兩種主要方式,但未能涉及車輛行駛優化。近年來,有學者開始探索車路云的結合,側重面向信息服務的系統架構[8-10]、計算分層結構[11]、系統級的通信技術與隊列控制方法[12]、云與邊緣控制器的切換方法[13]、交通信息提示[14-15]、交通流狀態估計[16]、邊緣計算卸載服務[17]等,但這些研究不具備實現復雜交通場景下融合感知、決策與控制的車路云一體化系統的概念,難以支撐面向不同功能與場景的各類網聯自動駕駛應用。
針對上述問題,本文中首先提出智能網聯汽車云控系統(簡稱“云控系統”)的概念。系統利用新一代信息與通信技術,將人、車、路、云的物理層、信息層、應用層連為一體,進行融合感知、決策與控制,可實現車輛行駛、交通運行安全和效率等性能的綜合提升。系統由云控平臺、路側基礎設施、網聯式智能汽車、通信網與資源平臺組成。云控平臺通過網聯式智能汽車、路側基礎設施與資源平臺的融合感知,形成物理交通系統的實時數字映射,進而進行分層融合決策,并對網聯式智能汽車與路側基礎設施實施融合控制,實現車輛行駛與交通信號的實時調節,以優化車輛與交通運行的安全、效率等性能。基于提出的智能網聯汽車云控系統概念,本文中設計了系統的車路云融合架構、基于CPS 理論的工作原理和5 方面的關鍵技術體系;隨后,針對系統實際應用的技術要求,研究邊緣云上的車路融合感知技術與時變時延下車輛控制技術,并搭建用于提升真實道路混合交通性能的云控系統;最后,通過算法仿真與道路試驗,驗證系統的車路融合感知與網聯車輛控制的性能,并展示系統應用于真實交通環境的可行性與先進性。
1 智能網聯汽車云控系統架構
本文中提出的智能網聯汽車云控系統是以云控平臺為核心、面向智能網聯汽車與交通的一體化優化系統。云控系統由云控平臺、路側基礎設施、網聯式智能汽車、通信網與資源平臺組成,其基本架構如圖1 所示。通信網連接人車路云各節點,網聯式智能汽車、路側基礎設施和資源平臺與云控平臺相連。
(1)云控平臺

圖1 智能網聯汽車云控系統基本架構
云控平臺是構建車路云標準通信與實時計算環境、實時融合車路云數據、進而統一協調運行智能網聯駕駛與智能交通應用(簡稱“協同應用”)、支撐云控系統進行車輛及其交通運行性能優化的云平臺,由云控基礎平臺與協同應用組成。云控基礎平臺為協同應用提供通信鏈路、交通全要素實時數據與應用實時運行環境。云控平臺根據車輛與交通運行優化需求,對云控基礎平臺和協同應用進行統一調控與管理。為更好支撐對實時性和服務力度有不同要求的協同應用,云控基礎平臺具有邊緣云、區域云與中心云3 級架構,邏輯統一,物理分散,實現協同應用的按需動態運行。邊緣云(含邊緣計算節點)通常服務街或區,主要運行實時協同應用;區域云通常服務市或省,主要運行準實時協同應用;中心云服務全國,運行非實時應用。上一級云協調下一級云,其服務實時性逐級降低,服務力度依次增大。
設計云控平臺的總體技術架構如圖2 所示,重點針對以下4 方面問題。
為打破目前車路云形成信息孤島的困境,云控系統使用統一的標準化機制進行車路云通信,以實現高效廣泛互聯與高性能傳輸。云控平臺利用軟件定義網絡與網絡功能虛擬化等先進技術,對通信需求與網絡狀態進行實時監控與預測,實現云控平臺與通信網上通信過程的動態調控,以提升通信效率與可靠性。
為滿足各類協同應用對各交通要素數據的共性需求,云控平臺統一利用網聯式智能汽車與路側基礎設施的感知能力和資源平臺的數據,通過各級云上的實時感知信息分級融合,構建全域交通全要素的高精度實時數字映射即數字孿生digital twin,以高精度動態地圖形式,為廣泛的協同應用提供運行所需的各類實時數據。
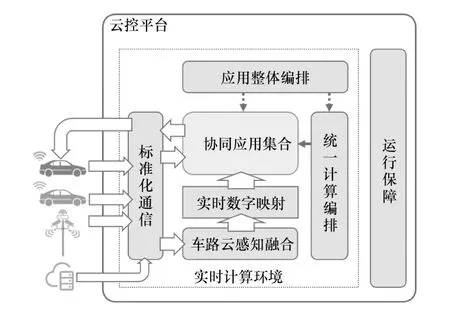
圖2 云控平臺總體技術架構
為應對高并發下協同應用所調控物理對象的行為相互沖突的問題,云控平臺構建多目標多任務協同的應用整體編排框架,對協同應用運行方式與行為進行整體規劃,保障其性能的充分利用,提升云控系統,優化車輛與交通運行的性能。
為協調高并發下協同應用爭搶計算資源的問題,云控平臺建立統一計算編排框架,根據協同應用與場景,基于虛擬化、容器與微服務等技術,對系統計算資源使用進行統一優化配置,實現協同應用高并發地按需實時運行,保障協同應用服務于車輛與交通運行優化的安全性與預期性能。
(2)路側基礎設施
路側基礎設施是布置在道路附近的實現人車路互聯互通、融合感知、局部輔助定位等功能的設備集合。通過優化設計而布置的路側傳感器支撐云控系統對混合交通的融合感知。路側通信設備增強云控系統的通信覆蓋范圍與可靠性,構建前端的閉環反饋鏈路。
(3)通信網
云控系統集成異構通信網絡,基于標準化通信機制,實現系統中人、車、路、云的廣泛互聯通信,利用5G、軟件定義網絡等先進通信技術實現高性能與高可控性。
(4)網聯式智能汽車
網聯式智能汽車連接云控基礎平臺、路側基礎設施與其他車輛,共享車端數據,接收協同應用的輸出并做出響應。網聯式智能汽車是云控系統的數據源與受控對象。云控系統不僅直接提升網聯式智能汽車的行駛性能,還利用網聯式智能汽車對其所處混合交通的行為進行優化。
(5)資源平臺
資源平臺是提供協同應用運行所需其他數據的專業平臺,涉及高精地圖、地基增強定位、氣象、交通管理、公安等。
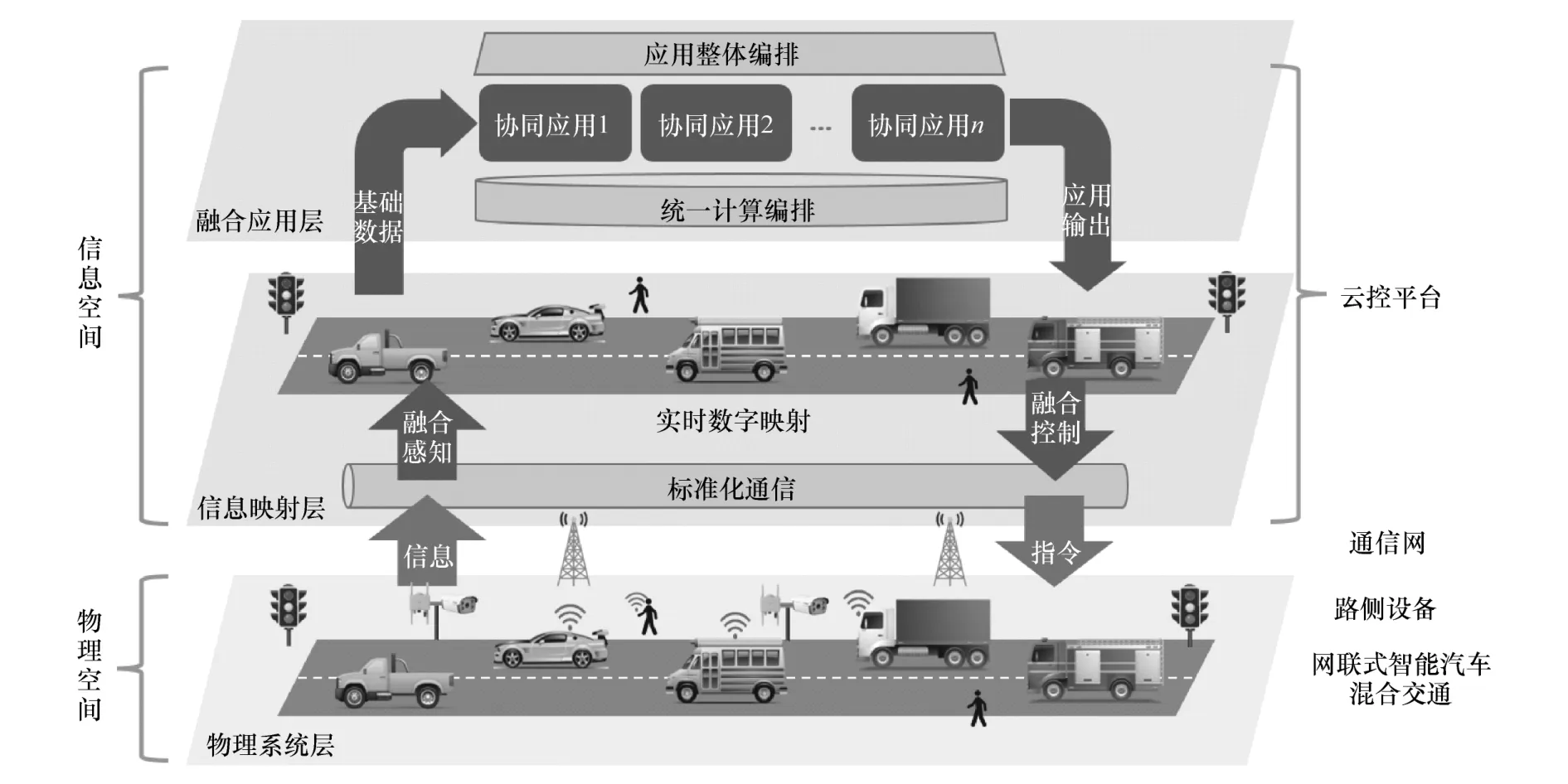
圖3 智能網聯汽車云控系統工作原理示意圖
智能網聯汽車云控系統的工作原理源于信息物理系統理論,如圖3 所示。云控系統基于標準化通信與實時數字映射構建信息映射層,標準化通信實現物理空間與信息空間之間的通信鏈路與反饋控制閉環,實時數字映射構建物理空間的人(駕乘人員、行人、車輛與交通管理者等)、網聯式智能汽車、道路網、信息網、感知網等對象在信息空間的模型與實時狀態;基于對系統計算資源與協同應用的統一編排而構建融合應用層,實現智能網聯駕駛與智能交通相關應用在信息空間中高并發地按需實時運行;將協同應用的輸出反饋到物理空間的車輛與交通信號上,進行全域車輛與交通運行的分層優化,實現安全、效率等性能的綜合提升。云控系統融合了車輛、路側基礎設施與云平臺的能力,以網聯調控方式優化車輛行駛與交通運行,因此智能網聯汽車云控系統也可被稱為車路云融合控制系統。
2 系統特征與關鍵技術
2.1 系統特征
根據工作原理,云控系統同時具備如下核心特征,使其區別于現有車聯網與車路協同系統。
(1)車路云泛在互聯:云控系統全域范圍內車路云各異構節點,通過標準化通信機制進行廣泛互聯通信,打通信息孤島,構建起用于支持融合控制的閉環通信鏈路。
(2)交通全要素數字映射:云控系統通過對從車路云實時獲取的各交通要素數據進行分級融合,構建物理世界在信息空間的實時數字映射,統一為不同協同應用提供運行所需的交通要素實時數據,破解混合交通感知難題。
(3)全局性能優化:云控系統通過對協同應用運行方式與行為進行統一編排,消解應用間行為沖突,利用各應用的優勢性能,進一步提升系統優化車輛與交通運行的性能。
(4)高效計算調度:云控系統基于協同應用動態運行要求,通過對計算資源使用的整體動態優化調度,確保系統資源的高效利用,實現全域協同應用實時運行的高并發性,保障所服務車輛與交通的運行安全與性能。
(5)系統運行高可靠:云控系統通過對感知、計算、應用實例等方面的可靠性動態需求分析與多重備份等方式,實現系統的車輛與交通運行優化的高可靠性。
2.2 關鍵技術
為支撐智能網聯汽車云控系統的上述5 大特征,基于總體技術架構,在通信、感知、計算、應用、可靠性等5 個方面,設計云控系統以下關鍵技術及其參考架構。
(1)車路云標準化通信技術
車路云標準化通信技術以標準化機制構建云控系統的車、路、云的廣泛互聯,實現高并發通信的高性能、安全性與可定制性。具體關鍵技術有異構通信、標準通信協議與應用協議管理、高性能消息中間件、通信性能全局動態優化、信息安全動態保障等。其參考架構如圖4 所示。
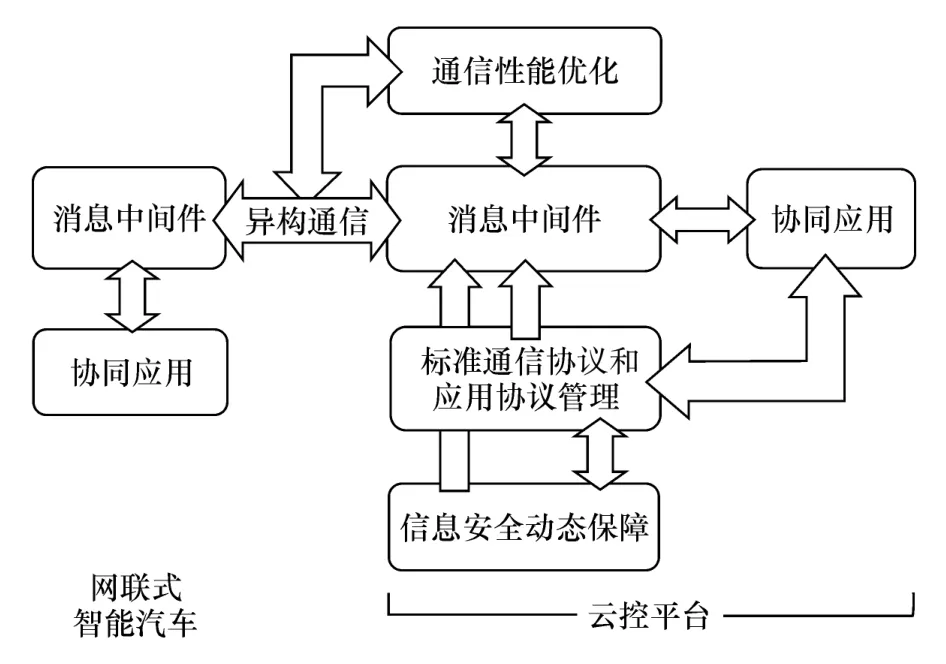
圖4 車路云標準化通信技術參考架構
(2)車路云融合感知技術
車路云融合感知技術將云控平臺獲取的車路云感知信息,在邊緣云上進行目標級感知融合,在區域云上進行交通級感知融合,形成交通全要素實時數字映射,并在中心云上構建數據集。每個邊緣云與區域云與相鄰的同級云進行信息同步與共享,以提升響應與可靠性。其參考架構如圖5 所示。
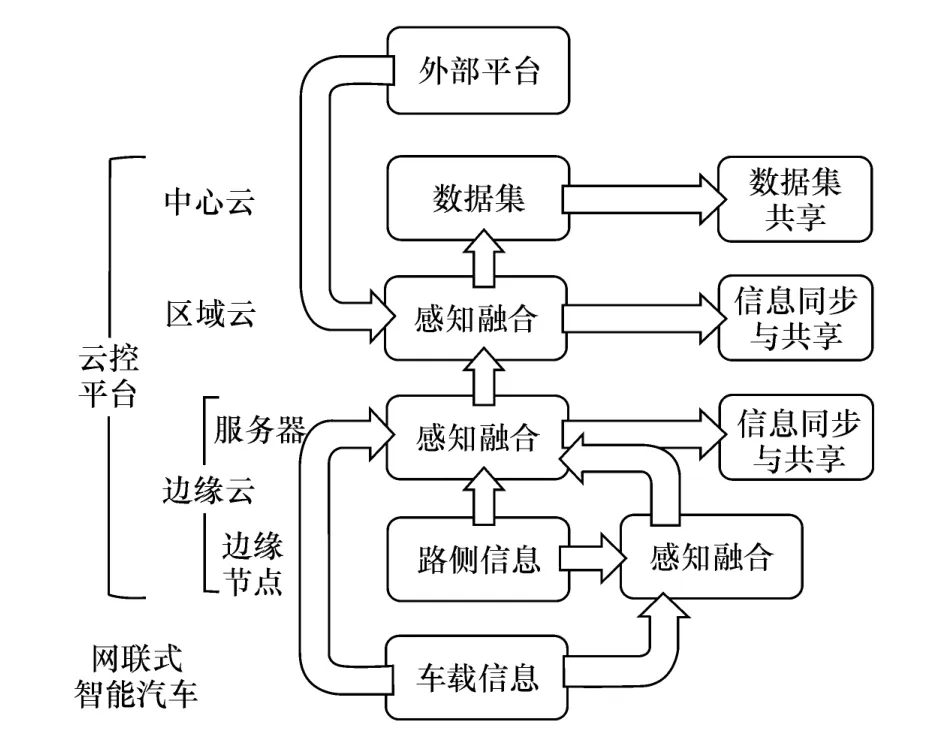
圖5 車路云融合感知技術參考架構
(3)應用整體編排技術
應用整體編排技術將協同應用按服務對象與功能在云控平臺進行分級部署。區域云考慮交通整體性能,進行集中式應用編排,規劃協同應用整體的生命周期與行為。隨后,區域云與邊緣云考慮個體需求對每個協同應用進行動態調控,以消解應用間行為沖突,最大化系統總體優化性能。其參考架構如圖6 所示。
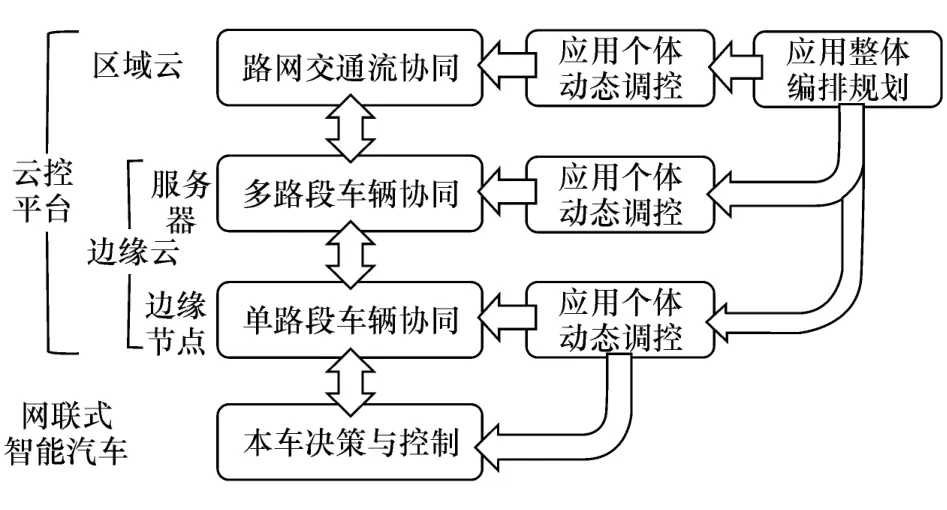
圖6 應用整體編排技術參考架構
(4)統一計算編排技術
統一計算編排技術根據協同應用的計算要求與應用整體編排的規劃,由區域云進行集中式優化,確定協同應用的部署與運行方式及算力配置,以最大化系統當前狀態下可靠運行的協同應用的總效用,由區域云與邊緣云進行各應用的計算與運行調度。其參考架構如圖7 所示。
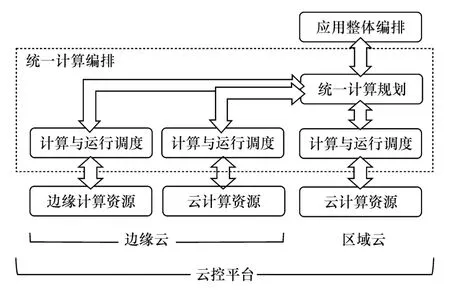
圖7 統一計算編排技術參考架構
(5)運行保障技術
運行保障技術通過節點與鏈路的動態備份提升云控平臺的可靠性,通過車端自動駕駛與協同應用的協作來克服系統運行工況波動的影響。車端還部署安全模式應用,以在極端工況下安全地切換到單車自主控制。其參考架構如圖8所示。

圖8 運行保障技術參考架構
3 云控系統應用
云控系統是復雜的網聯控制系統,需要解決眾多系統要素的狀態觀測與融合問題,需要克服網聯控制鏈路時變時延對控制性能的影響。因此,有必要基于前述關鍵技術參考架構,研究邊緣云車路融合感知方法與時變時延下網聯車輛控制方法。
3.1 邊緣云車路融合感知
車路融合感知用以提高云控系統感知交通與環境狀態的范圍與性能。針對多源傳感器信息融合這一核心問題,提出邊緣云上融合不同通信鏈路的車路融合感知技術架構,如圖9 所示。
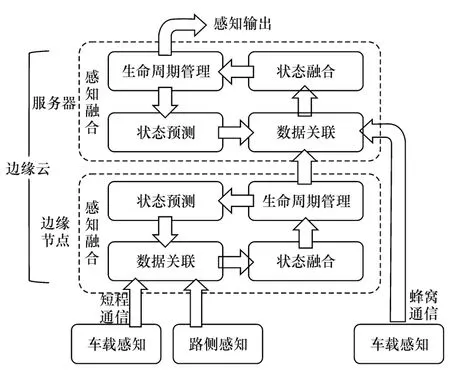
圖9 邊緣云車路融合感知技術架構
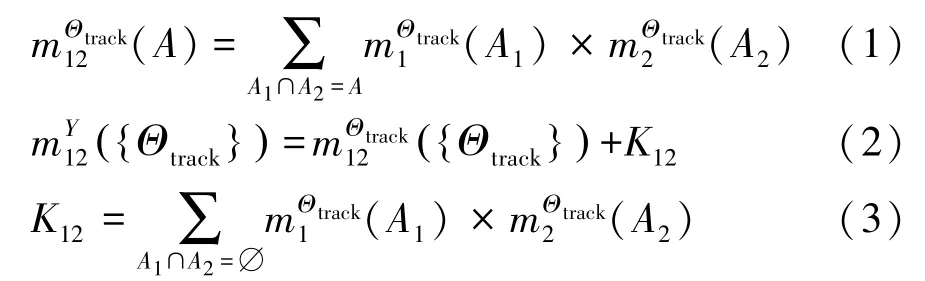
實現上述技術架構,可采用如下具體方法。首先,采用恒角速度與加速度運動模型對目標軌跡狀態進行預測。接著,分別采用全局最近鄰域法與聯合概率數據關聯法等方法,進行不同類型傳感器量測與目標軌跡的數據關聯。然后,根據數據關聯結果,利用擴展卡爾曼濾波對目標狀態進行融合更新。最后,基于證據理論對目標軌跡生命周期進行管理,處理軌跡狀態的不確定性。
3.2 時變時延下車輛控制
云控系統的車輛融合控制需克服通信、計算等環節時變時延的影響。針對時變時延下車輛控制穩定性這一關鍵問題,提出邊緣云上適用于多種融合控制場景的網聯車輛控制技術架構,如圖10 所示。
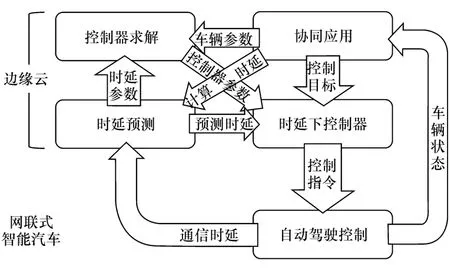
圖10 網聯車輛控制技術架構
建立如下適用于多種場景的車輛控制系統:

式中:x(k)為狀態向量;A為系統矩陣;u(k)為控制向量;B為控制輸入矩陣;v(k)為控制目標向量;G為控制目標輸入矩陣。假設傳感器、控制器與執行器采樣周期相等,最大時延持續周期數為N,設計時變時延下狀態反饋控制器:

式中:K為控制器增益;τ(k)為時變時延周期數;φ(k)為初始條件。通過將式(5)的控制器應用于式(4)的系統,建模網聯車輛控制系統:

將時變時延τ(k)建模為馬爾可夫過程,服從給定狀態轉移概率。
架構中控制器求解模塊與時延下控制器模塊采用團隊研究的控制器設計方法及對數量化切換控制器[19]。具體地,式(6)可轉化為如下增廣系統:
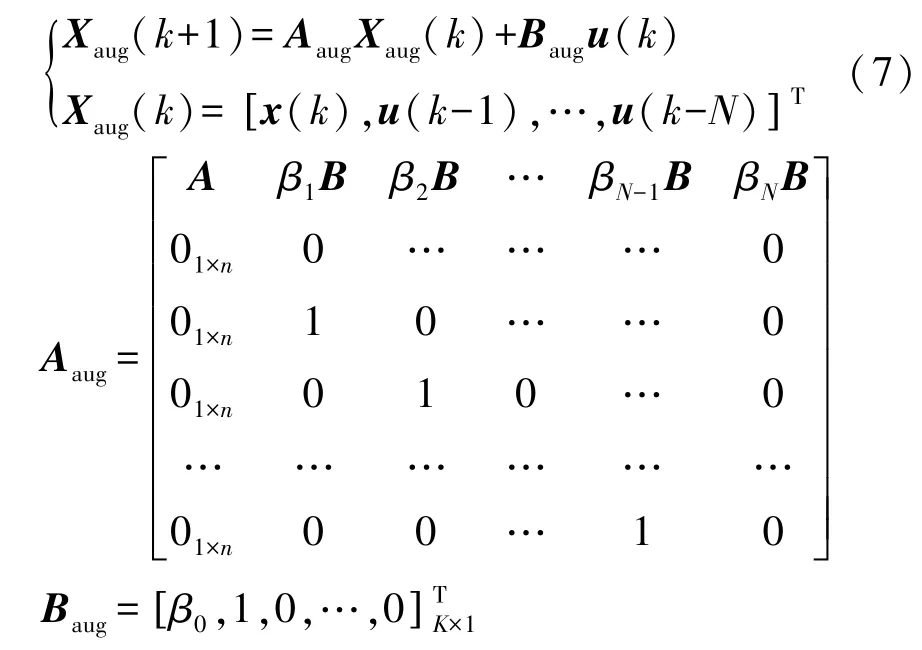
式中βi為控制器參數,i=0,…,N。控制器采用根據時延切換的對數量化控制器,控制器參數通過求解系統參數相關的線性矩陣不等式[19]確定。
4 云控系統驗證
為驗證云控系統應用的先進性與實現的可行性。進行云控關鍵感知、規劃與控制技術的仿真試驗。搭建服務真實道路的云控系統,開展云端計算與路側融合感知試驗,進行車路云融合下協同應用道路試驗。
4.1 融合感知仿真
為驗證云控系統的車路融合感知對比車端感知與路側感知的性能優勢,進行了基于SUMO 仿真平臺的道路上感知仿真。對感知與融合過程進行簡化建模,不考慮感知目標相互遮擋,假設量測的位置誤差與目標距離呈線性關系。在表1 參數的混合交通場景(示意圖見圖11)下進行仿真,仿真結果見圖12與圖13。
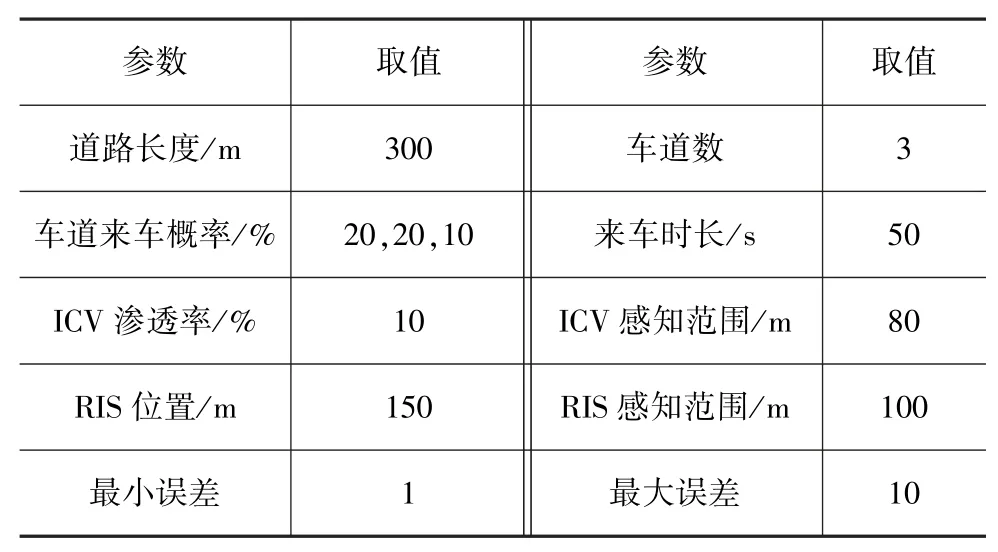
表1 道路上感知仿真參數
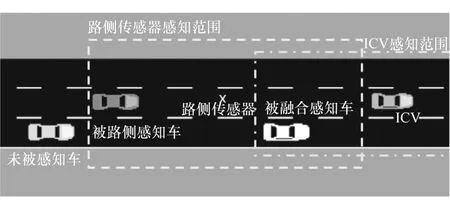
圖11 道路上感知場景示意
圖12 顯示了不同技術下道路上車輛在不同時刻被感知的數量比例,可見車路融合感知具有最大的感知空間范圍,道路上被感知車輛比例相比車端感知平均提升18%,相比路側感知平均提升21%。圖13 表明了車路融合感知能減小車輛位置測量的最小誤差,相比車端感知最多減小43%,相比路側感知最多減少83%。
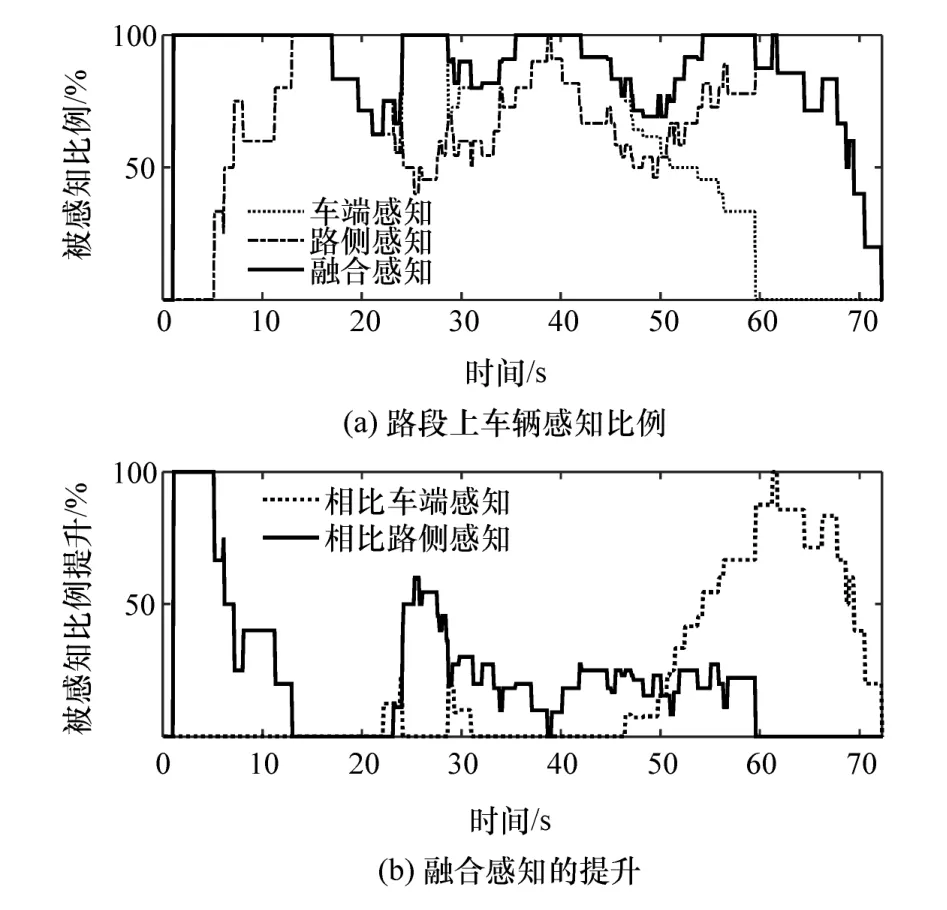
圖12 路段車輛被感知數量比例
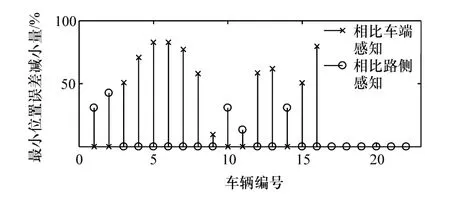
圖13 融合感知位置測量最小誤差減小量
4.2 路網車輛與交通融合規劃仿真
為驗證云控系統優化路網范圍車輛與交通運行的能力,進行了路網車輛與交通融合規劃仿真。云控系統統一調度交通信號、ICV 行駛路線與多車編隊,提升車輛與交通的運行效率。仿真場景為圖14所示路網,采用圖15 所示交通信號相位分類。交通工況為主路流量 720 ~3 600 輛/h,ICV 滲透率為20%~100%,輔路參數為主路的60%。對比方法為交通信號協同優化。
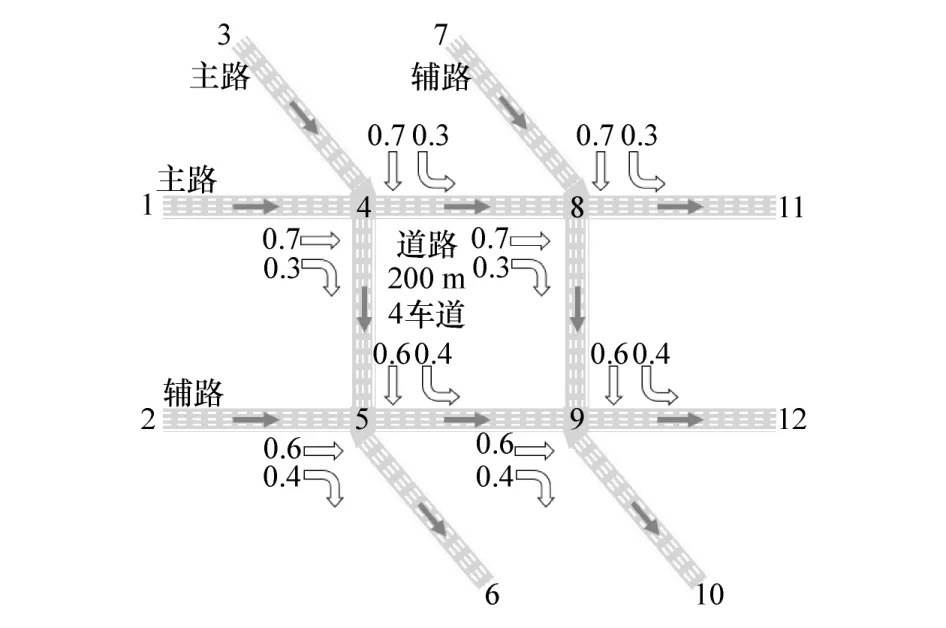
圖14 城市路網仿真場景
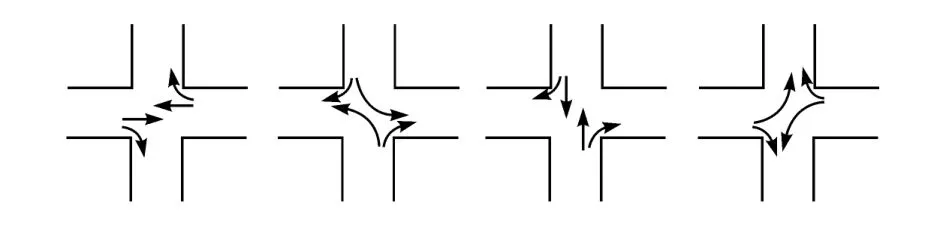
圖15 路口交通信號相位
融合規劃結果如圖16 所示,性能如圖17 所示。結果顯示,云控系統的融合規劃相比交通信號優化,能在不同交通流量與ICV 滲透率下進一步提升通行效率,性能提升量基本與滲透率正相關,這體現了云控系統車路云融合的優勢。
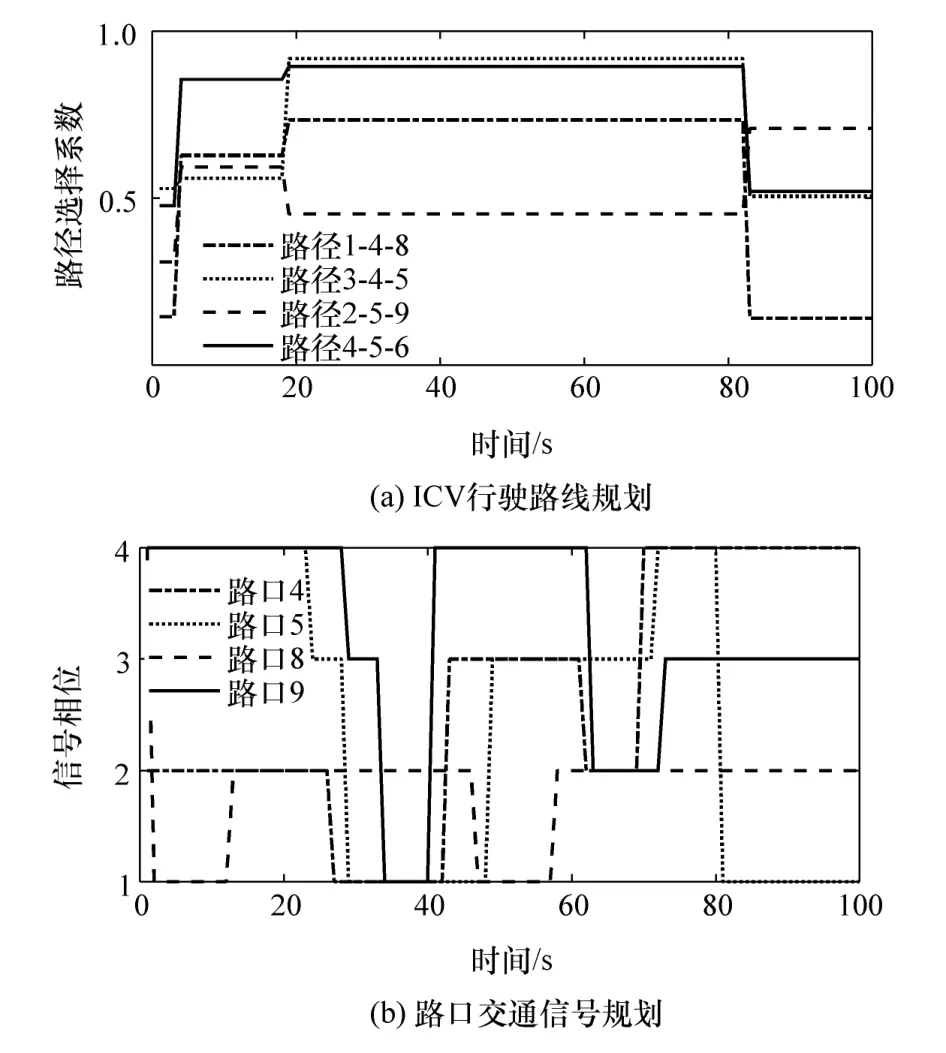
圖16 部分融合規劃結果
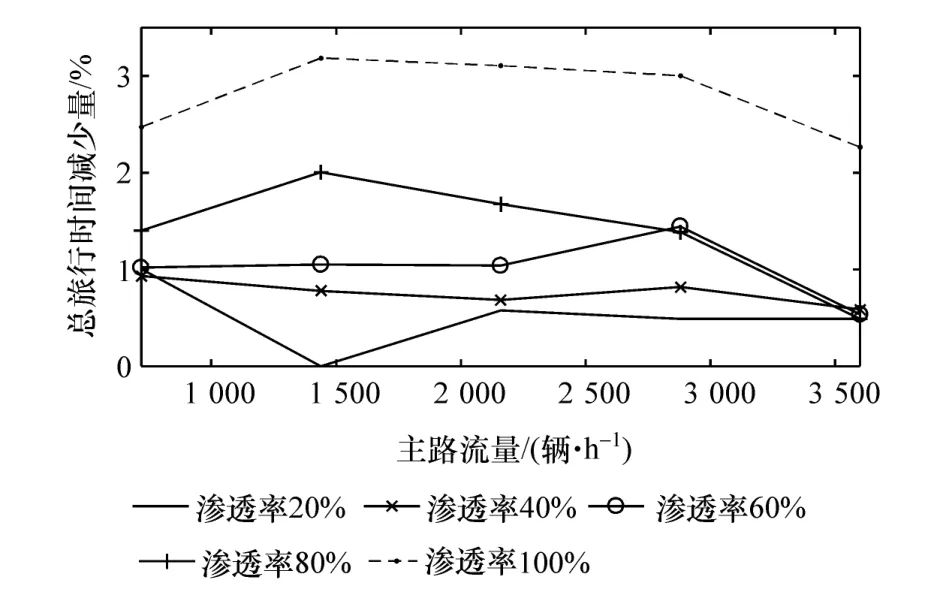
圖17 融合規劃性能提升
4.3 時變時延下控制仿真
為驗證云控系統實施網聯車輛控制的可行性,進行了時變時延下網聯跟車控制仿真。控制器中采用文獻[20]的跟車系統模型。時變時延由馬爾可夫模型生成,最大時延 250 ms。選取 LQR(linear quadratic regulator)控制器作為對比,基于Simulink仿真平臺進行仿真。前車速度曲線如圖18 所示。
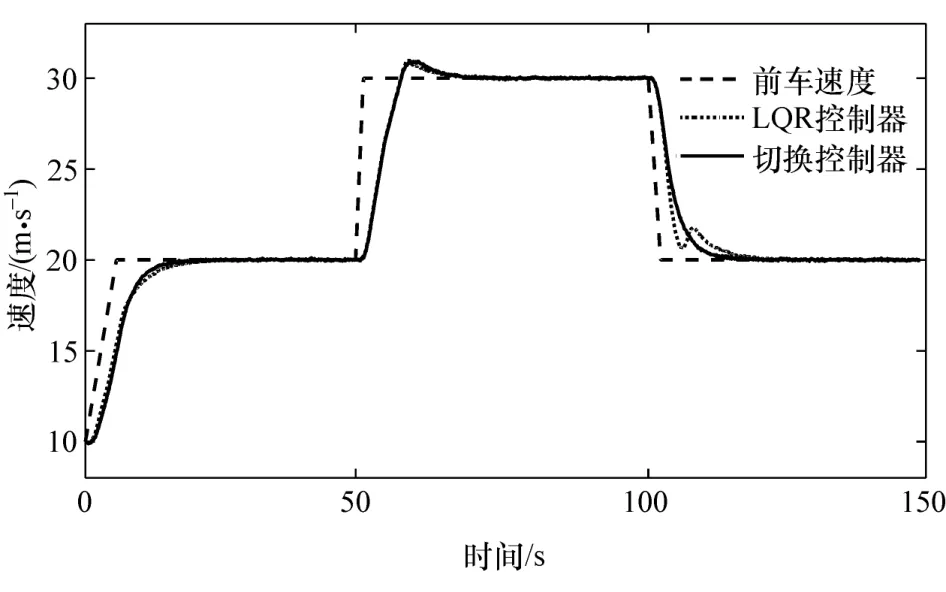
圖18 網聯跟車速度跟蹤
仿真中最大時延占比約88%,控制結果見圖18與圖19。在速度跟蹤上,本控制器總體上優于LQR控制器,速度控制平滑,平均調整時間更短,而LQR控制器在減速時速度控制出現振蕩。在跟蹤誤差上,本控制器整體誤差更小,且誤差變化更平順。可見,云控系統能使用考慮時延的控制器在時變時延下進行有效的網聯車輛控制。
4.4 云控系統搭建
為驗證智能網聯汽車云控系統實際應用的可行性,搭建了面向城市道路與高速公路的云控系統,如圖20 與圖21 所示,實現了異構通信、路側融合感知、協同應用按需運行等功能。
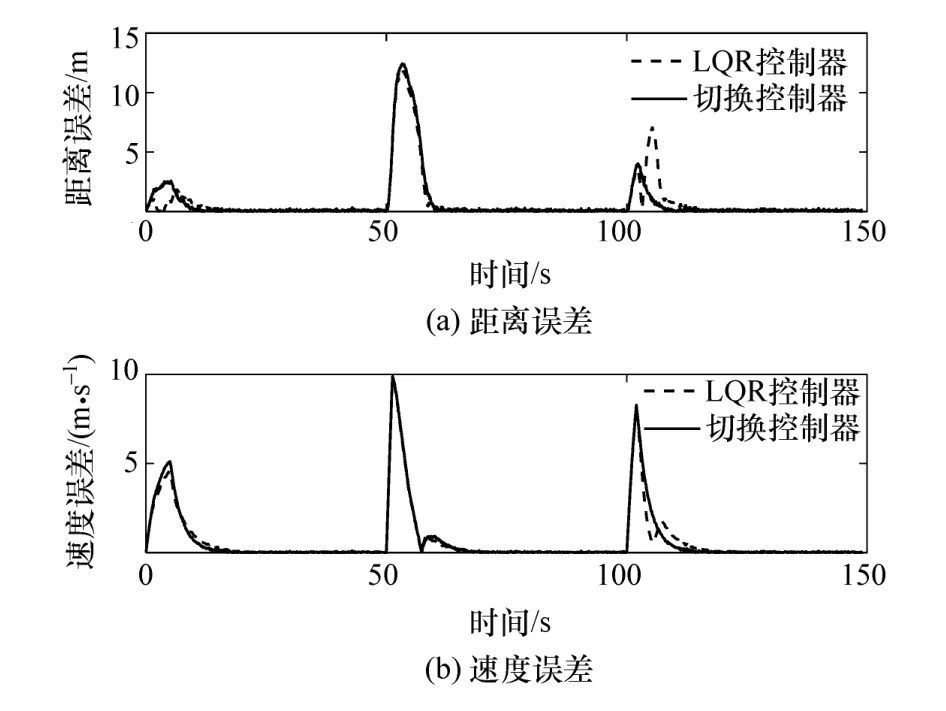
圖19 網聯跟車控制誤差
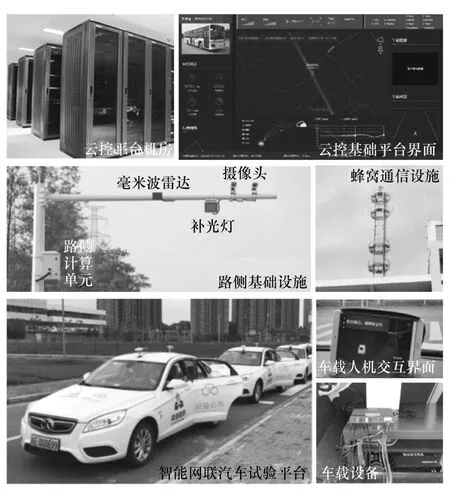
圖20 云控系統組成
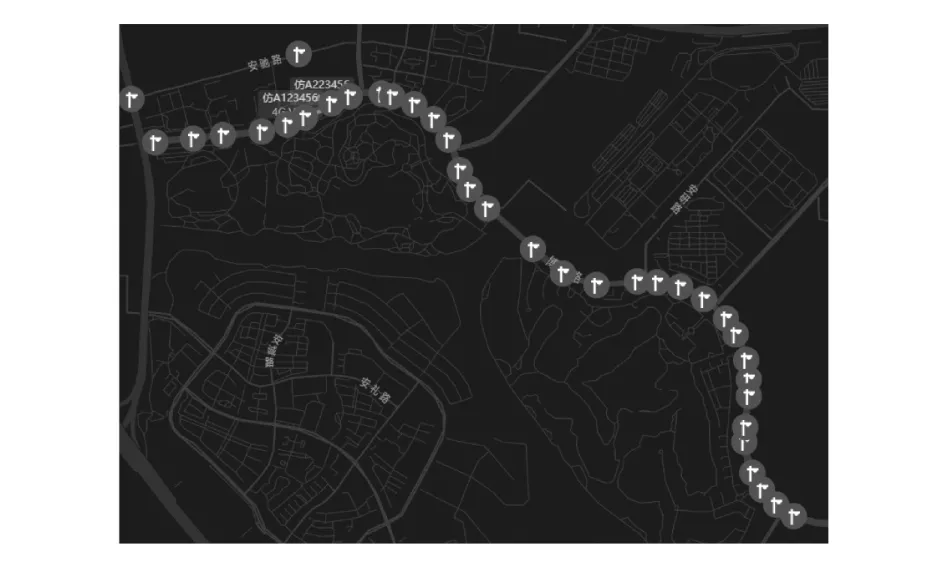
圖21 路側基礎設施布置
4.5 云控基礎平臺性能試驗
為驗證云控基礎平臺實現協同應用實時運行的能力,進行了路側感知數據并發輸入下云控基礎平臺底層處理耗時試驗。計時包括的環節有通信接口、數據包解析、消息中間件、消息生成等。使用4臺服務器物理機,配置為32 核處理器,128 GB 內存,1 000 MB 網卡。輸入數據為路側基礎設施感知數據回放。測試工況為50 套路側基礎設施數據并發輸入,每套設施的數據產生頻率為10 Hz,試驗中數據輸入總量9 128 萬條。試驗所得耗時分布如圖22 所示。平均耗時 6.3 ms,10 ms 及以下耗時占比99.58%,最大耗時 102 ms,出現 1 次。測試中物理機處理器占用小于16%,內存使用小于25 GB。網聯協同控制應用工作頻率為10 Hz 量級,考慮通信時延與算法耗時,試驗結果表明了云控基礎平臺已具備支撐實時協同應用的能力。
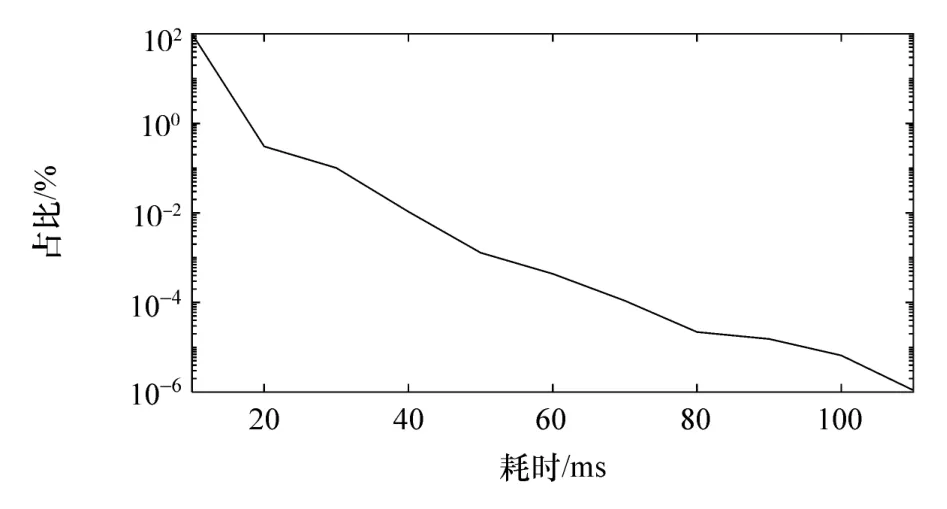
圖22 云控基礎平臺底層耗時分布
4.6 路側融合感知試驗
為驗證云控系統路側融合感知技術支撐網聯式自動駕駛的可行性,進行了感知精度試驗,結果如圖23 和圖24 所示。位置測量精度基本與目標距離正相關,速度測量精度受距離影響不顯著。參數測量精度達到了部分網聯式自動駕駛場景的要求,可支撐云控系統實施相應協同應用。
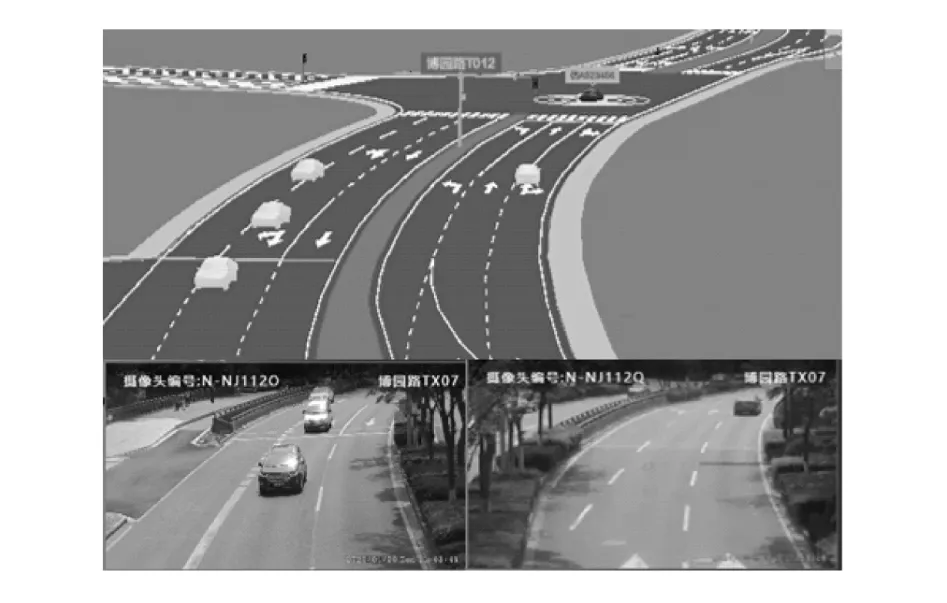
圖23 路側融合感知結果
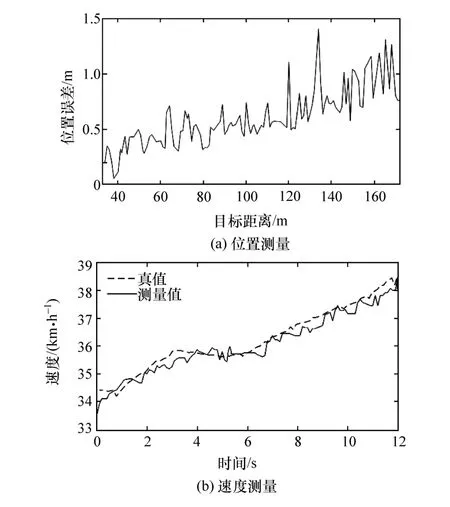
圖24 路側融合感知性能
4.7 路口讓行協同決策道路試驗
為驗證云控系統在混合交通中進行車輛運行優化的可行性,開展了路口讓行協同決策道路試驗。場景為T 型交叉路口,如圖25 所示。云控系統對路側感知識別的主路直行車與支路將右轉網聯車的運動進行預測,針對路口通行沖突為右轉車規劃讓行駕駛策略,減少其停車讓行直行車的情況,消解通行沖突,提高行車效率與舒適性。圖26 的道路試驗結果顯示,系統正確預測了通行沖突,合理提示了駕駛策略,使右轉車成功減速讓行了直行車,提升了其行車效率。
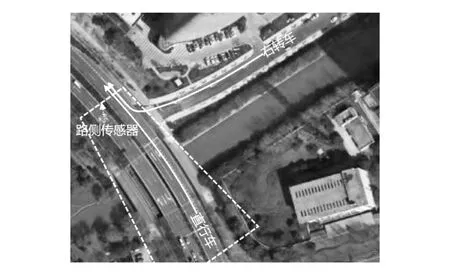
圖25 路口讓行場景
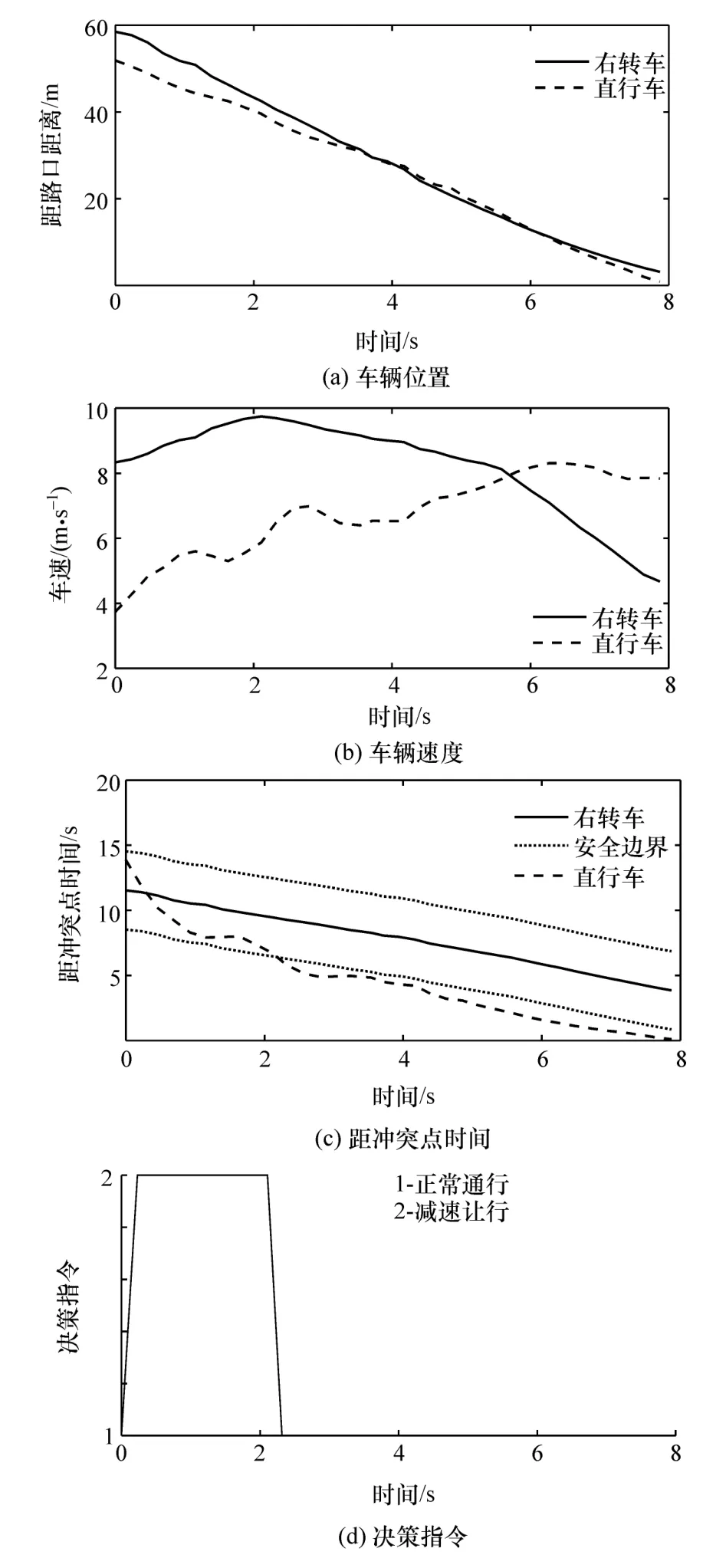
圖26 路口讓行道路試驗結果
4.8 多車協同換道道路試驗
為驗證云控系統進行多車協同的可行性,開展了多車協同換道道路試驗。場景為交叉路口前的多車道路段,如圖27 所示。云控系統協調右側車道影響換道的網聯式智能汽車改變車速讓出換道空間,幫助左側車道的網聯式智能汽車順利向右換道以在路口右轉,避免因其難以換道而阻礙后方交通。試驗結果如圖28 所示,系統有效地通過提示右側車道的兩輛車在可行時改變車速讓出足夠換道的車間距實現協同換道。

圖27 協同換道試驗場景與試驗過程
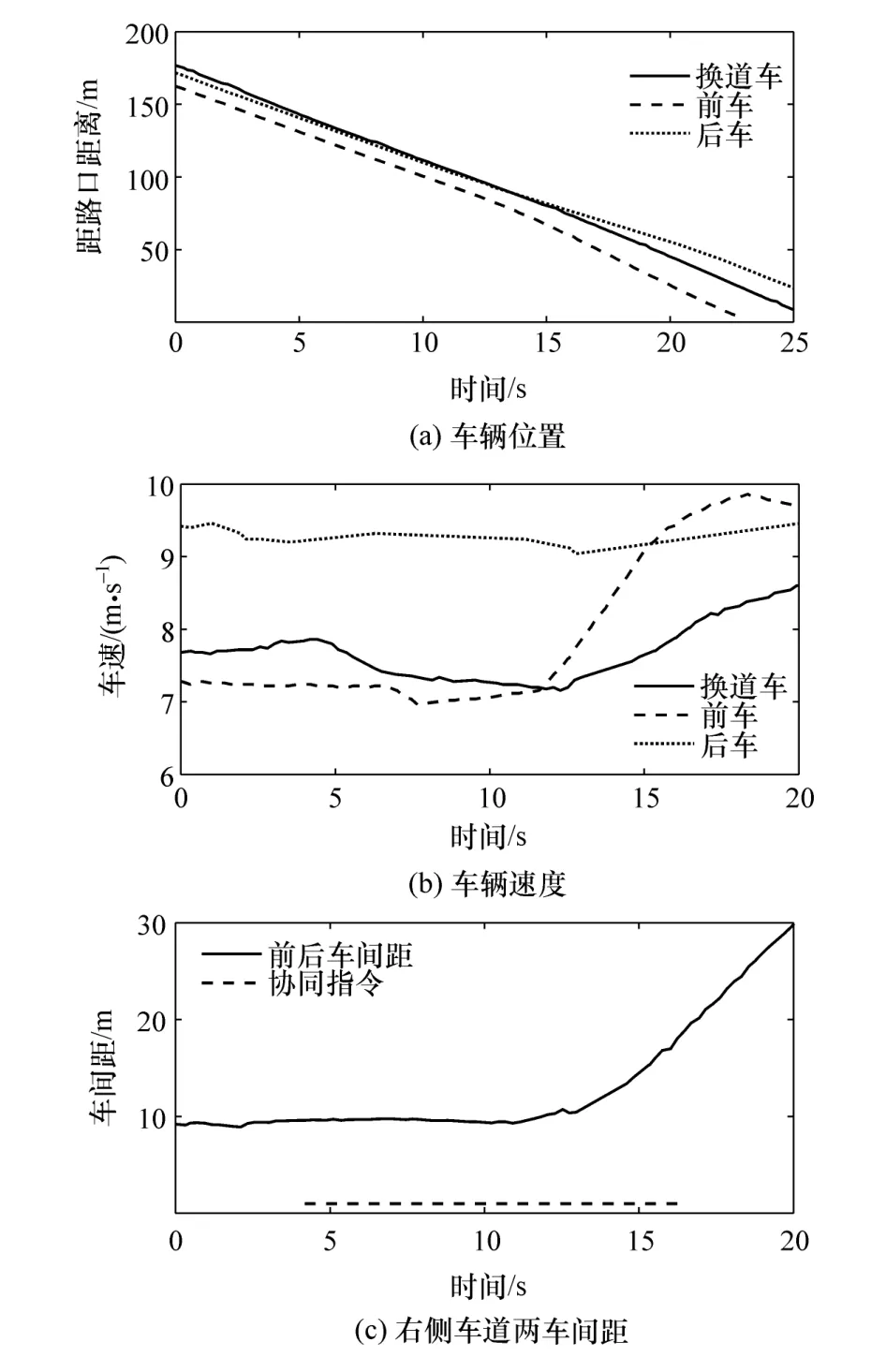
圖28 協同換道道路試驗結果
5 結論
本文中提出了車路云一體化融合的智能網聯汽車云控系統,探討了該系統同時具備的5 個特征,設計了車路云融合架構下對應5 個特征的5 個方面關鍵技術架構,研究了邊緣云上的車路融合感知技術與時變時延下車輛控制技術,開發了面向真實道路的云控系統,進行了關鍵感知、規劃與控制技術的仿真,并開展了云控系統云端計算、融合感知與協同應用的試驗,得到以下結論。
(1)云控系統是信息物理系統理論在智能網聯汽車領域的典型應用。云控系統在物理空間的物理系統層之上構建信息空間的信息映射層與融合應用層,進行車路云融合感知、決策與控制,實現車輛行駛和交通運行安全、效率等性能的綜合提升。
(2)云控系統同時具備車路云泛在互聯、交通全要素數字映射、全局性能優化、高效計算調度、系統運行高可靠等5 個特征,是其實現全域車輛與交通運行性能優化的核心條件。車路云標準化通信、車路云融合感知、應用整體編排、統一計算編排、運行保障等5 個方面關鍵技術,是保證上述核心條件的重要基礎。
(3)云控系統能應用于真實交通環境,提升車輛與混合交通的運行性能。仿真與道路試驗表明,云控系統的車路融合感知具有感知范圍與跟蹤時間等方面優勢,路網車輛與交通融合規劃能統一協調ICV 與交通信號提升混合交通效率,網聯車輛控制能在時變時延下保證車輛穩定,所搭建的云控系統能通過云端計算與路側融合感知,進行針對混合交通與多車協同的車輛與交通運行優化。
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
數學年刊A輯(中文版)(2022年4期)2022-02-16 08:17:34
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
無線電通信技術(2021年4期)2021-07-13 08:58:28
無線電通信技術(2021年3期)2021-06-08 03:33:48
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
福利中國(2015年4期)2015-01-03 08:03:38
