智能電動汽車自適應巡航與再生制動多目標協(xié)同控制*
2021-01-13 11:14:02郭景華李文昌王靖瑤李克強
汽車工程 2020年12期
關鍵詞:智能
郭景華,李文昌,王靖瑤,李克強
(1. 廈門大學航空航天學院,廈門 361005;2. 清華大學車輛與運載學院,北京 100084)
前言
隨著汽車工業(yè)的發(fā)展,交通事故、環(huán)境污染和能量消耗等社會問題日益嚴重[1]。具有高安全和低能耗特點的智能電動汽車被視為這些問題的有效解決方案之一,是當前的研究熱點[2]。
自適應巡航控制系統(tǒng)(adaptive cruise control,ACC)作為一種先進的輔助駕駛系統(tǒng),通過某種控制策略調(diào)節(jié)車輛的縱向運動狀態(tài),實現(xiàn)車輛自動加減速或縱向距離保持。近年來,國內(nèi)外學者對汽車的自適應巡航控制進行了較為深入的研究。陳龍等[3]構建了一種考慮前后方車輛行駛狀態(tài)的自適應巡航控制系統(tǒng),使車輛能在擁擠工況下根據(jù)前后車的相對位置和速度自動調(diào)節(jié)車距。高振海等[4]提出基于模擬駕駛員多目標決策的汽車自適應巡航控制方法,實現(xiàn)本車與前車安全車間距的保持控制。Kouzani 等[5]基于滑模控制方法設計了一種混合動力汽車巡航控制器,該控制器的性能比經(jīng)典PID 控制器更好。為改善自適應巡航控制系統(tǒng)的應用范圍,Zhang 等[6]通過分析熟練駕駛員的駕駛行為,設計一種控制系統(tǒng),該系統(tǒng)同時使用毫米波雷達和激光雷達傳感器。Haroon 等[7]提出一種ACC 協(xié)同控制系統(tǒng),以提高燃油經(jīng)濟性。李升波等[8]提出一種基于最少傳感器的終端滑模跟車系統(tǒng)控制器,該控制器對外部干擾具有高魯棒性,并且可減小跟蹤誤差。
對于傳統(tǒng)汽車來說,制動能量通過摩擦制動轉(zhuǎn)化為熱能,并最終消失,這部分能量在一些行駛工況中平均占所有有效驅(qū)動能量的50%[9]。而對于智能電動汽車來說,再生制動系統(tǒng)(regenerative braking system,RBS)用于將動能轉(zhuǎn)化為電能,以向智能電動汽車動力源再充電,是提高能量效率和行駛里程最有效的方法之一。再生制動能量回收的潛能很大程度上取決于制動力分配策略,因此制動力分配策略引起了廣泛關注。Xu 等[10]基于模糊邏輯設計了一種摩擦和再生制動力分配方法。該方法將前后輪制動力按照理想制動力分配曲線進行分配,能夠保證制動安全,但這種方法與固定比例的控制力分配方法相似,回收的能量少。仇成群等[11]提出一種電動汽車串聯(lián)再生制動控制策略,試驗結果表明所提出的方法能夠回收更多的能量。為協(xié)調(diào)混合動力汽車能量回收和制動穩(wěn)定性問題,Martinez 等[12]提出基于模型預測控制的再生制動能量回收控制方法,并降低了預測控制的計算負擔。
綜上所述,當前對智能電動汽車縱向控制的研究大多針對某一性能指標單獨設計自適應巡航控制系統(tǒng)或再生制動系統(tǒng),沒有考慮兩者相互影響的機理。對自適應巡航控制系統(tǒng)和再生制動系統(tǒng)的功能簡單疊加不但不能體現(xiàn)出各自應有的性能,反而會引起各控制系統(tǒng)之間的沖突和干擾,降低智能電動汽車縱向行駛的綜合性能。
因此,本文中以智能電動汽車為研究對象,提出一種智能電動汽車自適應巡航與再生制動協(xié)同控制方法,在保證智能電動汽車縱向行駛安全性和舒適性的同時,有效提升制動能量回收效率。
1 智能電動汽車系統(tǒng)建模
本文中將配置ACC 的前輪驅(qū)動智能電動汽車作為研究平臺。該智能電動汽車系統(tǒng)主要包括毫米波雷達、電池、交流感應電機、傳動比為6.673 2的單速變速器和液壓制動系統(tǒng),如圖1 所示。與傳統(tǒng)汽車不同,智能電動汽車ACC 與再生制動協(xié)同控制系統(tǒng)用電機代替發(fā)動機作為驅(qū)動執(zhí)行器,制動執(zhí)行機構包括電機和液壓制動系統(tǒng)。因此,研究該協(xié)同控制系統(tǒng)須建立較為復雜的非線性耦合模型。
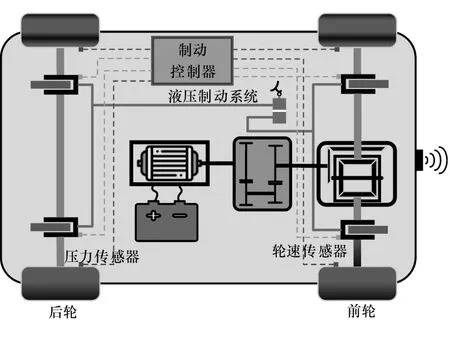
圖1 智能電動汽車結構示意圖
1.1 車輛模型
為建立車輛模型提出了如下假設:(1)忽略車輛的垂向和橫向運動;(2) 電機或液壓制動系統(tǒng)輸出到左右車輪的制動力矩相等;(3) 不考慮動力系統(tǒng)的轉(zhuǎn)矩損失。在以上假設下,建立了簡化的3 自由度車輛模型,該模型包含縱向速度v和前后輪轉(zhuǎn)動角速度ωf和ωr,其表達式如下:

式中:Fxf和Fxr分別為前后車輪的縱向輪胎力;Jwf和Jwr為前后車輪轉(zhuǎn)動慣量;Tt=ηgoigioTm為輸出到車輪的力矩,其中ηgo為變速器和主減速器總效率,ig為變速器傳動比,io為主減速度傳動比,Tm為電機輸出力矩,電機可提供驅(qū)動力矩或再生制動力矩;Tbf和Tbr分別為前后輪液壓制動力矩;r為車輪半徑;Fres為總的行駛阻力。Fres由滾動阻力、坡度阻力和空氣阻力組成:

式中:m為車輛質(zhì)量;g為重力加速度;f為滾動阻力系數(shù);θ為道路坡度;Cd為空氣阻力系數(shù);A為車輛前視面積;ρ為空氣密度。
1.2 輪胎模型
本文中采用廣泛使用的經(jīng)驗輪胎模型-魔術公式來表示縱向輪胎力。在魔術公式輪胎模型中,縱向輪胎力表達式如下[13]:

其中,輪胎滑移率λf,r可表示為

式中B、C、D和E為縱向輪胎力因子,可由下式計算:

其中參數(shù)b0~b8可通過輪胎力試驗獲取。
由式(5)可知,車輪縱向輪胎力與法向輪胎力相關。考慮載荷轉(zhuǎn)移,則前后車輪法向輪胎力可表示為

式中:Fzf和Fzr分別為前車輪和后車輪法向輪胎力;l為軸距;a和b分別為質(zhì)心到前軸和后軸的距離;hg為質(zhì)心高度。
1.3 交流感應電機模型
本文中在建立交流感應電機模型時不考慮復雜動力學,以便于實時應用。因此,交流感應電機輸出轉(zhuǎn)矩由忽略延遲的1 階傳遞函數(shù)表示:

式中:Tmd為期望電機輸出力矩;τm為時間常數(shù)。
電機效率MAP 圖如圖2 所示,圖中實線和虛線分別表示電機可輸出的最大和最小力矩,等高線表示電機效率,電機效率是電機力矩和電機轉(zhuǎn)速的函數(shù),其表達式如式(8)所示。
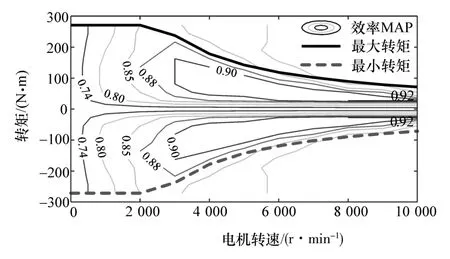
圖2 電機效率MAP 圖

式中:ηm為電機效率;ωm為電機轉(zhuǎn)速。
忽略輔件對電池功率的影響,期望輸出電池功率可等同于期望電機輸入功率,其表達式如下:
式中:Pb為電池功率;ηmdis和ηmchg分別為放電和充電下的電機效率。
1.4 電池模型
本文中忽略電池電壓動態(tài)并用內(nèi)阻模型來表示電池模型。一定溫度下電壓和電阻隨SOC 變化的曲線如圖3 所示。電池開路電壓Uoc和電池內(nèi)阻Rint與電池SOC 和電池溫度相關。SOC 可以表達為式(10)。
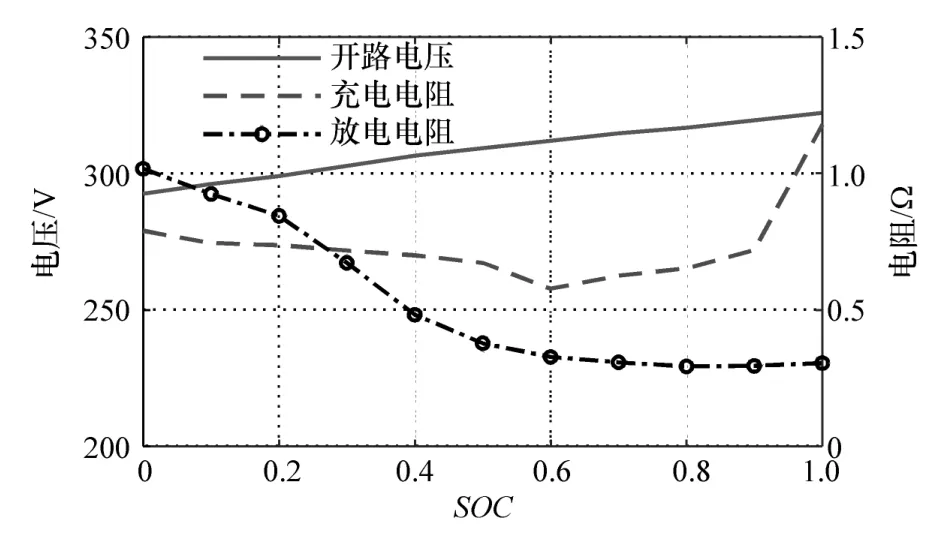
圖3 開路電壓與內(nèi)阻

式中Qb為電池名義容量。
2 自適應巡航與再生制動協(xié)同控制
本文中設計的自適應巡航與再生制動協(xié)同控制由自適應非線性上層控制器和再生制動下層控制器組成,從而實現(xiàn)智能電動汽車安全、高效和節(jié)能行駛。
2.1 自適應非線性上層控制器
自適應巡航過程包含兩相鄰的前方目標車和后方主車,兩車的速度分別由vl和v表示。主車和目標車間的實際車距是影響車輛安全和交通流的重要參數(shù),實際車距用d表示。智能電動汽車利用車載傳感器(如雷達)來感知周圍環(huán)境,從而獲取這些車間運動學狀態(tài)信號。
建立描述車輛縱向運動學的2 階狀態(tài)空間模型,其模型方程如下:
定義距離誤差如下:

式中:Δd為距離誤差;ddes為期望車距。
采用恒定車頭時距(CTH)空間策略來計算期望車距,可以表示為

式中:τh為車頭時距;d0為最小安全距離。
上層控制器的目的是確定主車期望加速度使系統(tǒng)狀態(tài)向量x=[Δdvr]T在有限時間內(nèi)收斂到平衡點。首先,設計如下滑模面:

對式(14)求時間導數(shù),可得

由于目標車加速度難以由智能電動汽車直接測得,故將目標車加速度視為外界干擾。

為克服干擾,需要設計切換控制律usw。本文中選用指數(shù)趨近控制律,以驅(qū)動系統(tǒng)狀態(tài)快速到達滑模面。

式中k和ε為正的常數(shù),并且滿足
因此,結合上述控制律式(16)和式(17),可求得如下期望加速度控制律u:
為保證車輛行駛舒適性,對控制輸入進行約束[14],本文中取控制輸入范圍為u∈[-3,2.5]。
將式(18)代入式(15),可推導出滑模面的導數(shù):

從而可得

由于目標車的加速度al和預設的常數(shù)m2有界,因此在的前提下可以滿足從而可以推斷系統(tǒng)漸近穩(wěn)定。
滑模控制的控制律具有良好的魯棒性,但在滑動面附近存在高頻顫振現(xiàn)象。因此,滑模切換控制不利于乘適性而且可能加快執(zhí)行器的老化。為解決上述問題,本文中采用了自適應模糊控制逼近滑模切換控制項。采用單輸入單輸出模糊控制器,則模糊邏輯系統(tǒng)的輸出可表示為

因此,期望的加速度控制律可以改寫成以下形式:

定義最小估計誤差如下:

然后可得

式中ζ為正實數(shù)。
為使參數(shù)適應于滑模面的變化,設計了如下自適應律:

式中γ為正常數(shù)。
2.2 再生制動下層控制器
期望加速度是連接上層控制器和下層控制器的橋梁。在下層控制器中設計了驅(qū)動和再生制動控制,以實現(xiàn)期望加速度,再生制動控制可以協(xié)調(diào)電機轉(zhuǎn)矩和液壓制動轉(zhuǎn)矩。
2.2.1 驅(qū)動控制
為維持智能電動汽車機械系統(tǒng)的壽命和提高的能量效率,應避免驅(qū)動力矩和制動力矩同時存在。
在驅(qū)動控制狀態(tài)下,只有電機作為執(zhí)行器。考慮到驅(qū)動阻力的影響,電機期望的牽引轉(zhuǎn)矩Tmd可以推導如下:

式中Ttd=r(mades+Fres) 為期望驅(qū)動轉(zhuǎn)矩。
2.2.2 再生制動分配策略
對于傳統(tǒng)的制動系統(tǒng),制動能量最終轉(zhuǎn)換為熱能。此外,在某些行駛工況下,尤其是市區(qū)道路,車輛需要頻繁地制動,這意味著大量制動能量將被消耗。因此,很有必要回收制動能量,以提高能量效率。本文中提出了一種分段式再生制動策略,以實現(xiàn)安全節(jié)能的制動控制。
在一定的制動強度下,前后輪制動力的分配比例關系到制動穩(wěn)定性和制動效率。輪胎與路面間的制動力受摩擦因數(shù)的限制,當制動力達到附著極限時,車輪將抱死。因此,輪胎和道路間的制動力需要滿足下式:

式中:Fbf,brmax為Fbf和Fbr的最大值,分別表示前輪和后輪的最大制動力;μ為可估計的附著系數(shù)。
前輪比后輪更早抱死是一個相對穩(wěn)定的情況[12]。當只有前輪抱死時,不同附著條件下前后輪制動力之間的關系可以表示為

可以看出式(29)是與附著系數(shù)相關的線組。相反,如果后輪比前輪先抱死,很可能發(fā)生車輛側(cè)滑,從而導致車輛喪失操縱穩(wěn)定性。只有后輪被抱死時,前后輪制動力之間的關系可用式(30)表示,對應圖4 所示不同附著系數(shù)下的r線組。
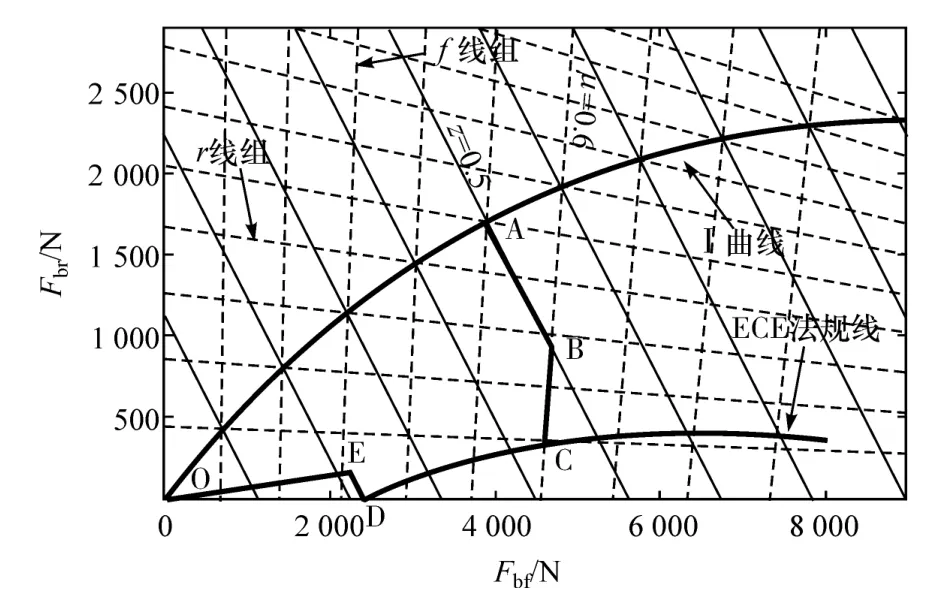
圖4 再生制動控制范圍

當前后輪同時抱死時,路面附著條件將得以充分利用。在這種情況下,前輪和后輪的理想制動力分配關系如下:

實際應用中,要實現(xiàn)制動過程中前后輪同時抱死,需要復雜的結構。當前很多車輛前后輪制動力分配比例采用固定值。
此外,為保證方向穩(wěn)定性和制動效率,歐洲經(jīng)濟委員會(ECE)制動法規(guī)要求不同附著系數(shù)下的最小制動強度如下:

式中z為制動強度。
根據(jù)ECE 制動法規(guī)可推導出下邊界符合的方程:

一般情況下,再生制動在附著系數(shù)在0.6 ~0.9之間時運行,且制動強度通常小于0.55[15]。
再生制動策略的設計如下:首先,根據(jù)期望加速度值計算期望制動強度,并根據(jù)電機實時速度和可用功率,查表獲取電機所能提供的最大轉(zhuǎn)矩;其次,根據(jù)所提出的制動策略和道路限制求取前后輪制動力;最后,計算出前輪再生制動力矩、前輪液壓制動力矩和后輪液壓制動力矩。為保證制動距離,前后輪的制動力應滿足

制動強度分為4 個階段,具體制動力矩分配如下:
(1)0<z≤0.22
在此范圍內(nèi),前后輪之間的制動力關系滿足

式中kOE為OE 線的斜率。
然后,通過解式(35)和式(36)可得到前輪和后輪的制動力。
(2)0.22<z<0.44
在此范圍內(nèi),前輪和后輪的制動力根據(jù)ECE 曲線進行分配,將式(34)代入式(35)即可求解。
(3)0.44≤z≤0.5
在此范圍內(nèi),制動力遵照線CB 分布,可表示為

式中kCB為CB 線的斜率。
因此,制動力可通過求解CB 線和式(35)線的交點得到。
(4)0.5<z<1
當制動強度超過0.5 時視為緊急制動,這時只采用摩擦制動,以保證車輛在這種情況下的制動安全。
然后,為了防止車輪抱死,施加在制動執(zhí)行器上的制動力如下:

式中Fμf和Fμr分別是作用于前輪和后輪制動執(zhí)行器的總期望制動力。
另一個關鍵問題是再生制動力和液壓制動力的分配。為了最大限度地回收制動能量,一旦電機能夠產(chǎn)生比前輪所需制動力矩更多的制動轉(zhuǎn)矩,則前輪所需的制動力矩完全由電機提供。因此,在下層控制器中可以得到制動力矩向量:

式中Tgen=rFμf為作用在前輪上的再生制動力矩,且Tbf1= 0 和Tbr1=rFμr。
如果電機不能為前輪提供足夠的制動力矩,電機輸出當前轉(zhuǎn)速下最大轉(zhuǎn)矩,不足部分由制動液壓系統(tǒng)補償。在這種情況下,制動力矩向量表示如下:

其中:Tbf2=rFμf-Tgen;Tgen2=igi0Tmmax;Tbr2=rFμr
3 驗證與分析
為驗證所設計的智能電動汽車自適應巡航與再生制動協(xié)同控制系統(tǒng)的有效性,在Matlab/Simulink仿真平臺上進行了不同行駛工況下的仿真試驗。
3.1 跟隨工況
跟隨工況仿真設定如下:主車和目標車行駛初速度均為10 m/s,車輛行駛在附著系數(shù)為0.85 的平坦道路上;仿真時間60 s,目標車行駛過程最大加速度為1 m/s2,最大制動減速度為3 m/s2。
跟隨工況仿真結果如圖5~圖10 所示。圖5 為主車和目標車的速度軌跡,圖中顯示主車能較好地跟隨目標車行駛。由圖6 可見,由于采用CTH 間距策略,期望車距的形狀跟隨速度變化,且結果顯示實際車距很好地跟隨期望車距。圖6 中的放大區(qū)域展示跟隨過程中的最大車距誤差,可以看出最大車距誤差值不超過0.5 m。主車和目標車的加速度曲線如圖7 所示。結果表明:該方法能使智能電動汽車適應于目標車加速度的變化。圖8 為主車加加速度,主車行駛過程中絕大部分加加速度值均在5 m/s3以內(nèi),且波動幅度較小,一定程度上體現(xiàn)了跟車過程的行駛舒適性。

圖5 速度跟蹤結果
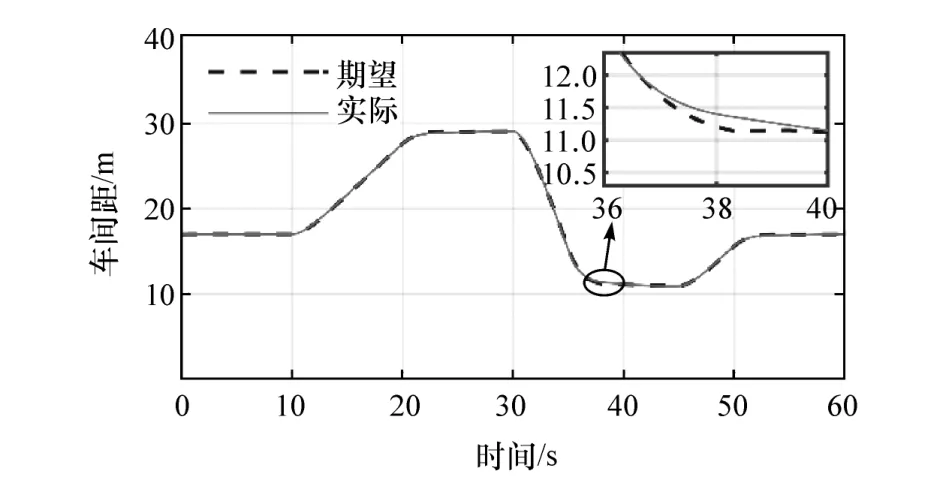
圖6 距離跟蹤結果
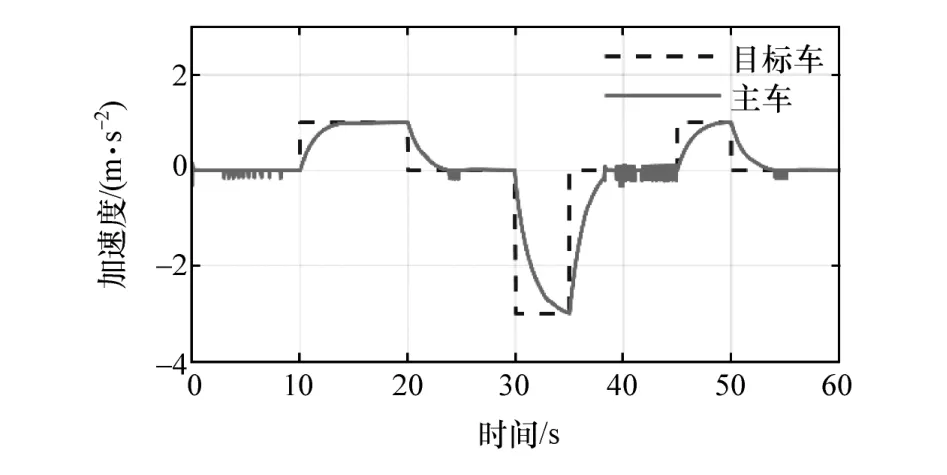
圖7 主車和目標車加速度
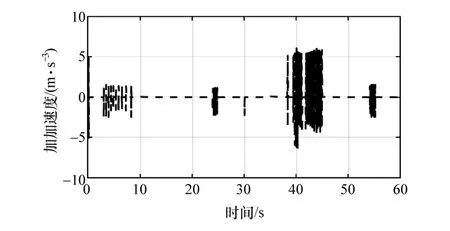
圖8 主車加加速度
以碰撞時間(TTC)的倒數(shù)作為穩(wěn)定跟車工況的安全評價指標[16],其表達式為

TTC-1變化情況如圖9 所示,正值表示可能發(fā)生追尾碰撞,負值表示安全狀況。從圖中可以看出,TTC 的結果在合理的范圍內(nèi)([-0.1,0.25]),這證明所提出的方法可以確保穩(wěn)態(tài)跟車時的行車安全。

圖 9 TTC-1變化曲線
為驗證所提出的再生制動策略的有效性,使用傳統(tǒng)無再生制動和固定比例制動策略進行仿真對比試驗。固定比例策略表示前輪制動力與總制動力的比值固定,其表達式為

這里使用典型的比例β=0.6。
3 種制動策略控制下的穩(wěn)態(tài)跟車能量消耗如圖10 所示。對比結果表明:在本文中提出的制動策略的控制下,跟車結束后所消耗的能量最低。
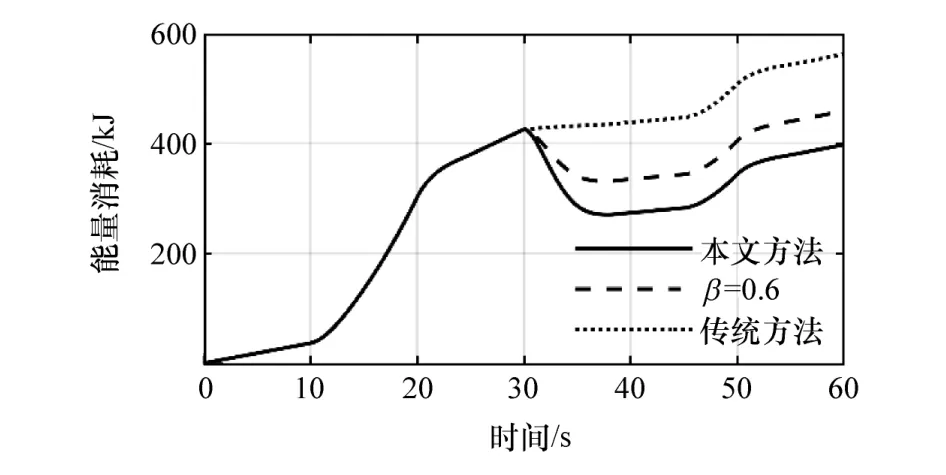
圖10 3 種策略控制下的能量消耗
定量比較如表1 所示,初始SOC 為50%,3 種制動策略控制下的最終SOC 分別為49.72%、49.65%和49.54%。本文中提出的再生制動策略回收的能量分別比傳統(tǒng)制動控制方法和固定比例再生制動策略高154.93 和61.32 kJ;能量回收率比傳統(tǒng)制動控制方法和固定比例再生制動策略分別提高了69.19%和27.30%。
跟車工況下的結果說明主車能安全、精確地跟隨目標車平穩(wěn)行駛,與再生制動協(xié)調(diào)控制可以有效提高電動汽車的能量效率,行駛過程具有一定的舒適性。

表1 能量回收性能比較
3.2 切入-切出綜合工況
切入-切出綜合工況仿真設定如下:主車開始以15 m/s 的速度穩(wěn)定跟隨目標車1,目標車1 在15 s處開始加速,在20 s 處切出本車道;目標車1 切出后,主車以20 m/s 的速度巡航行駛,在30 s 處,目標車2 在主車前方25 m 處低速切入,跟隨目標切換為目標車2;仿真時長為60 s。目標車1 和目標車2 速度軌跡如圖11 所示。
仿真結果如圖12~圖15 所示。開始時,主車穩(wěn)定跟隨目標車1 行駛;15 s 后主車跟隨目標車1 加速行駛,直至20 s 時目標車1 切出。在該過程中,從圖13 可以看出,實際車間距很好地跟蹤期望間距軌跡;從圖14 可以看出主車加速度波動小;圖15 表明該階段主車加加速度值較小,體現(xiàn)了舒適性。目標車1 在20 s 處切出后,主車加速至設定的20 m/s的速度巡航行駛。30 s 處,目標車2 切入,主車速度高于目標車2,且車間距小于期望值,此時主車快速進行減速,以提高車間安全性,減速度達到設定的閾值,同時也導致舒適性變差。實際車間距收斂至期望安全距離后,主車安全、平穩(wěn)跟隨目標車2 行駛。

圖11 目標車1 和目標車2 速度軌跡
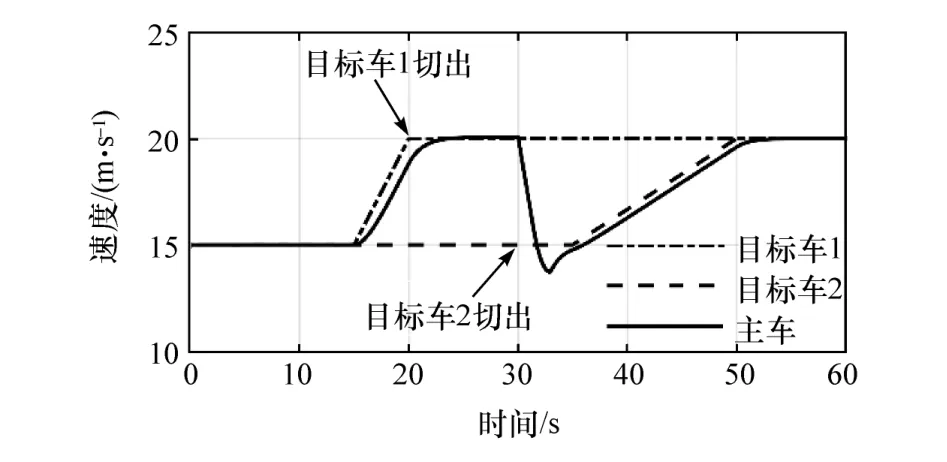
圖12 主車和目標車1、2 的速度軌跡
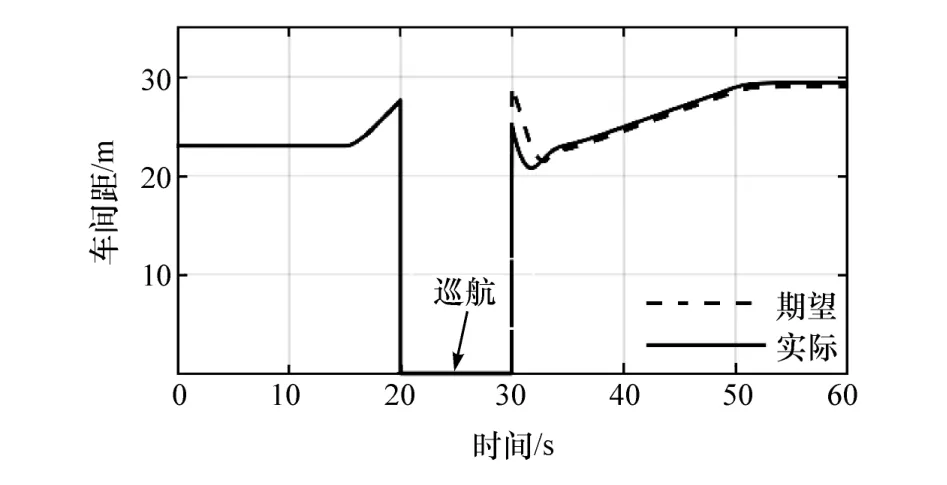
圖13 車間距
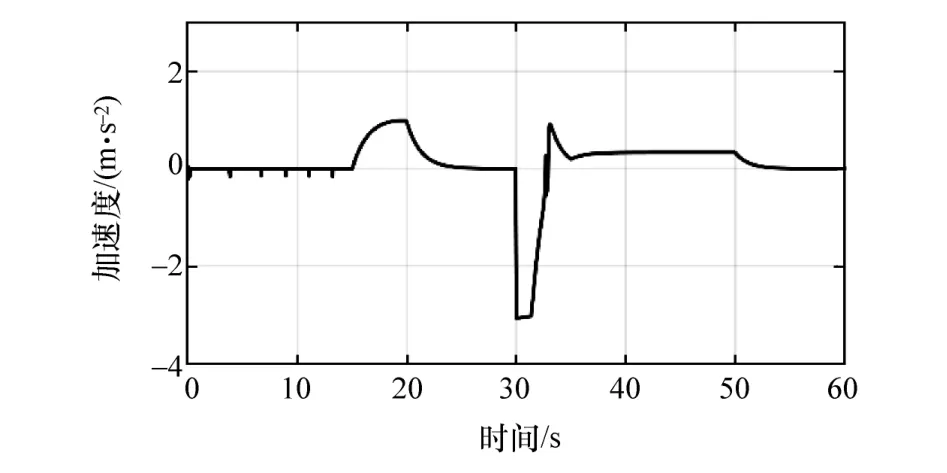
圖14 主車加速度
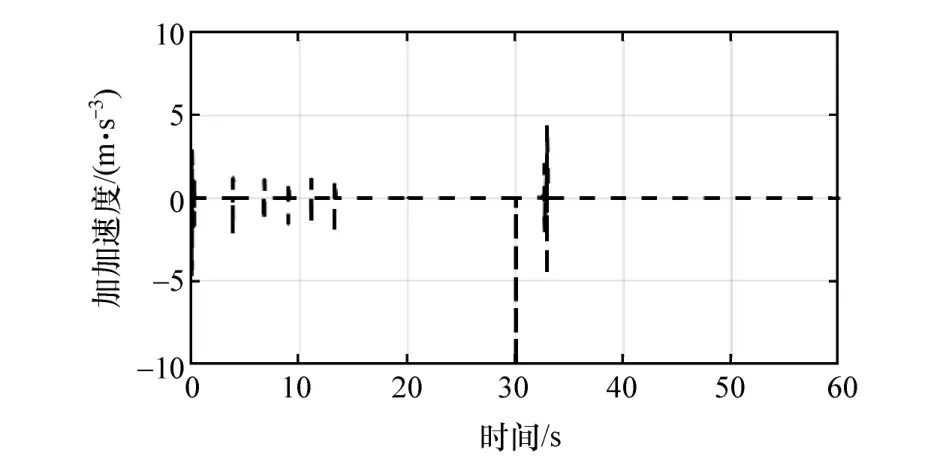
圖15 主車加加速度
4 結論
本文中提出一種智能電動汽車自適應巡航與再生制動多目標協(xié)同控制方法,在保證智能電動汽車安全性、舒適性的同時,可有效提升制動能量回收效率。
(1)針對智能電動汽車非線性和參數(shù)不確定性的特點,提出一種基于自適應巡航與再生制動協(xié)同控制的構架,以實現(xiàn)智能電動汽車安全、高效、節(jié)能行駛。
(2)提出一種自適應模糊滑模控制方法,以快速精確獲取跟車期望加速度;利用自適應模糊邏輯逼近滑模控制切換項,以降低切換抖振。
(3)提出一種再生制動控制策略,協(xié)調(diào)智能電動汽車再生制動系統(tǒng)與液壓制動系統(tǒng);在保證制動安全的前提下最大化能量回收,并驗證了本方法比固定再生制動分布比例的方法更節(jié)能。
猜你喜歡
開放教育研究(2021年3期)2021-05-25 02:41:06
小學科學(學生版)(2020年12期)2021-01-08 09:28:04
裝備制造技術(2020年4期)2020-12-25 05:26:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
能源(2018年4期)2018-05-19 01:53:44
