系繩拖曳半物理試驗裝置設計與方案可行性驗證
2021-01-14 03:15:32杜木雄劉明洋張世軒趙志亮
科學技術與工程 2020年35期
杜木雄,賀 云*,劉明洋,張世軒,趙志亮,4
(1.中國科學院沈陽自動化研究所機器人學國家重點實驗室,沈陽 110016;2.中國科學院機器人與智能制造創新研究院,沈陽 110016;3.中國科學院大學,北京 100039;4.東北大學機械工程與自動化學院,沈陽 110006)
隨著空間技術的進步,人類進入太空的活動不斷增強,隨之產生越來越多的空間碎片。事實上,空間碎片可以導致航天器性能下降、功能失效甚至徹底損壞。繩系拖曳(tethered space-tug,TST)系統是一種清除太空垃圾有效的方法,不僅可以將傳統機器人的操作空間延伸到百米級,減少燃料消耗,還可以由于本身的繩系系統的柔性特性,有效防止末端碰撞力向平臺傳遞,大幅度提高空間平臺在任務過程中的安全性[1-2]。
半物理仿真多用于武器裝備的研發和測試、機器人、航天等用途,是指仿真實驗回路中接入部分實物的實時仿真,又稱硬件在環或半實物仿真,是利用仿真模型替代一部分物理實物,通常由物理構件、數字模型及支持數字模型運行的仿真機軟硬件設備組成,具備試驗效率高,成本較低等特點[3-5]。
為模擬太空中失重環境下而進行繩系系統地面仿真試驗,東京工業大學、NASA(美國航空航天局)、南京航空航天大學利用天-地動力學相似原理,搭建由噴氣來實現太空中失重環境的氣浮仿真平臺對繩系衛星系統進行物理試驗[6-9]。Schultz等[10]利用大尺度水平結構模擬Tips運行時系繩內部張力變化的示意圖。Kojima等[11]利用一定傾斜角度的坡面轉臺微重力環境模擬繩系衛星的動力學。上述試驗方法和太空試驗具有較高的相似性,但是在實現軌道面外動力學仿真和難以模擬復雜空間環境上還是有很多難以解決的挑戰[12]。為此,設計一種適用于繩系系統地面試驗的半物理仿真實驗裝置,將仿真系統中易實現的系繩收放與張力控制器部分以實物的方式引入仿真回路,拖曳過程中復雜的非線性系統動力學部分以數學模型描述并轉化為仿真計算模型,構建半物理仿真閉合回路,以此來驗證繩系系統理論研究的可行性。
1 半物理試驗裝置設計
1.1 半物理試驗組成原理
如圖1所示,系繩收放裝置(主動星)和半物理加載設備(被動星)以實物的形式引入半物理試驗仿真回路中。建立主被動星空間失重環境下系繩動力學方程,以數學模型的方式引入仿真回路。拉力傳感器測得的張力值由數學模型實時計算,得到不同繩長擾動動力學載荷,折算成衛星位移量及繩系變形量,由半物理加載設備中張力控制器執行繩長的收放,以此模擬被動星的狀態。系繩收放裝置根據指令進行系繩實時收放控制,具體功能包括系繩張力控制、系繩收回速度控制、位置保持、系繩張力測量和繩長測量。張力、繩長測量與執行策略,拖曳動力學模型通過使用NI labview軟件和PXIe6341的實時解算運行。

圖1 系繩收放半物理加載設備工作原理Fig.1 Tether retractable semi-physical loading equipment works
1.2 拖曳動力學建模
建立圖2所示的拖曳系統模型,拖曳系統主要由主動星(S)、被動星(M)和連接兩者間的系繩組成。假設系統處于的軌道為圓形,建立圖2所示坐標系,M、S的連接線為矢量,連接點A、B間距離矢量為lAB,AM、BS間距離矢量分別為rM與rS,可得
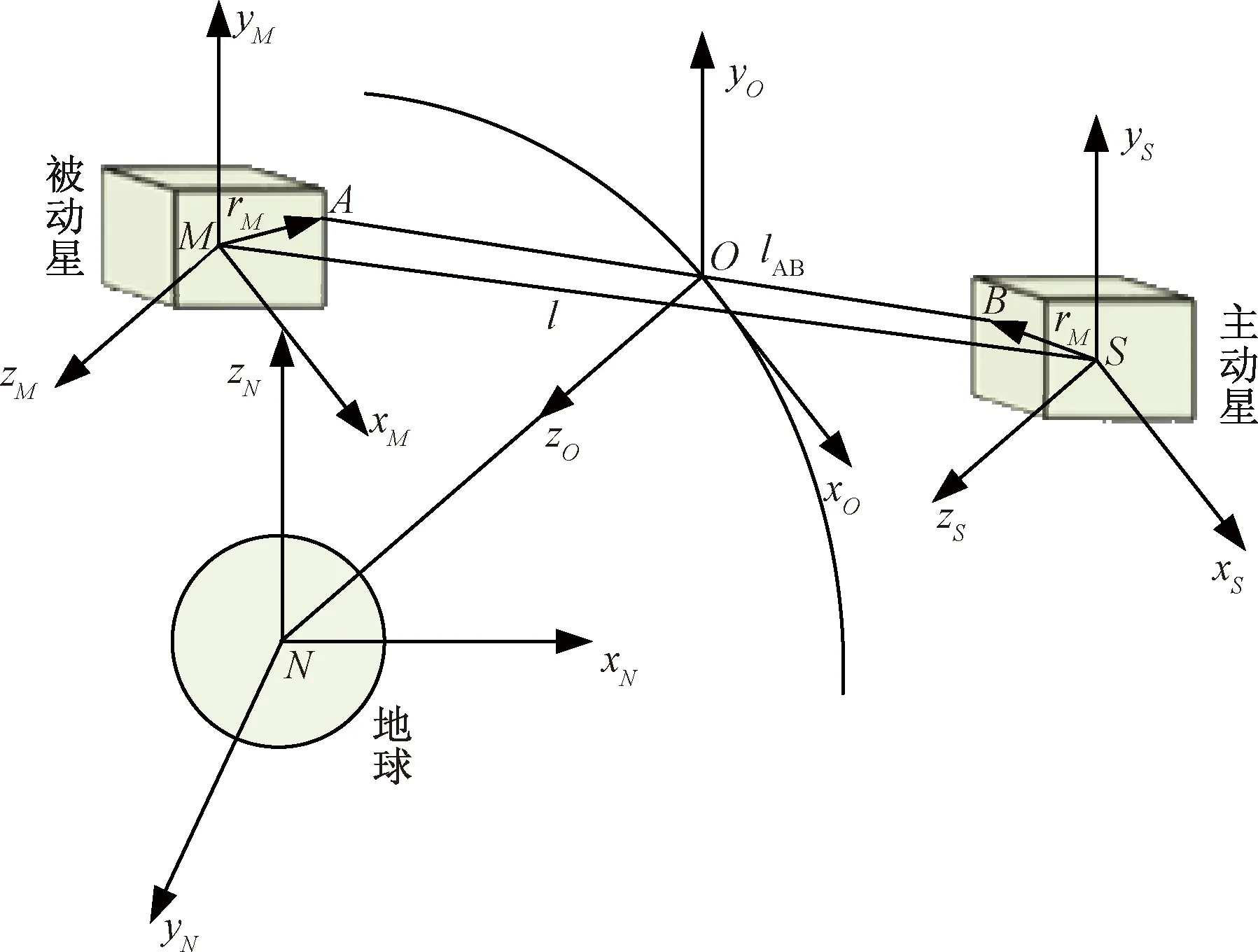
圖2 拖曳系統姿態圖Fig.2 Towing system attitude map
lAB=l-AOMrM+AOSrS
(1)

(2)


(4)
由牛頓-歐拉定理,主被動星的動力學方程可表示為[13]

(6)


(7)
式(7)中:μg為地球引力常數;R為軌道距離地球質心的距離。
使用珠子模型對繩系衛星進行建模。設想系繩為無質量彈簧和點質量串聯,把系繩離散為單位質量,其中系繩張力fi可表示為
fi=fi,i+1-fi,i-1,i=0,1,2…,n-1
(8)

(9)
式中:fi,i-1和fi,i+1分別表示作用于前端節點和后端節點的力,由開爾文-沃格定律可得;αd表示系繩的阻尼系數;ηi,i-1=EA(li,i-1-li,i-1)/li,i-1代表系繩的伸長量;EA為楊氏模量;li,i-1、li,i-1代表在節點i和i-1系繩的瞬時長度和初始長度。
1.3 半物理試驗裝置工作模式
試驗臺位置控制模式加載原理如圖3所示,此時系繩收放裝置處于張力控制模式,半物理加載設備工作在位置模式,將系繩測量張力作為控制器輸入,通過實時解算數學模型得到拖曳過程中的各項參數,進而控制張力控制器。

圖3 試驗臺位置控制模式加載原理Fig.3 Test bench position control mode loading principle
2 半物理加載裝置張力控制器精度驗證
2.1 基于模糊PID的主從位置閉環控制器設計
2.1.1 聯合控制策略
圖4所示為卷揚電機和電動缸組成張力控制器的聯合仿真算法流程圖,建立電動缸與卷揚主從位置控制工作模式,通過卷揚電機驅動滾筒旋轉實現半物理執行機構的繩長粗調節,電動缸實現精調。電動缸和卷揚聯合仿真程序框圖如圖5所示。
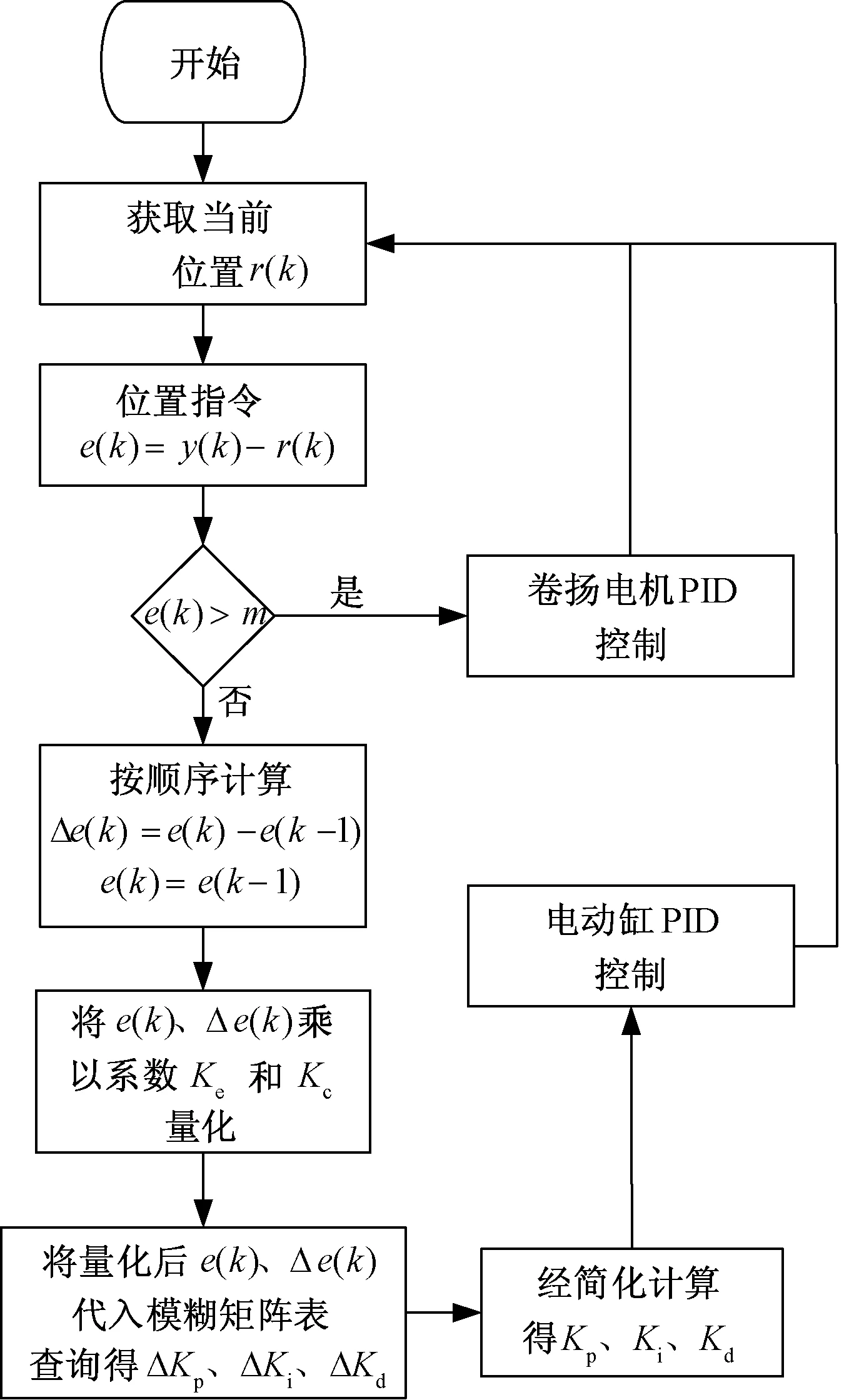
圖4 電動缸/卷揚聯合仿真控制算法框圖Fig.4 Electric cylinder / hoist joint simulation program block diagram

圖5 電動缸/卷揚聯合仿真程序框圖Fig.5 Electric cylinder / hoist joint simulation program block diagram
電動缸使用模糊PID控制器進行微調,建立電動缸的控制框圖如圖6所示。利用編碼器測量輸出端的位置。建立Simulink仿真模型,分析系統頻率特性響應。
2.1.2 模糊控制器設計
由于模擬拖曳過程具有非線性和不確定干擾的時變性特點,傳統的PID控制參數不能有效應對模型的變化。因此設計了模糊PID控制器,通過對控制器參數Kp、Ki和Kd實時調整,實現拖曳過程的實時性和快速性,由修正后的Ki、Kd控制伺服電機的行為。其計算公式為

(10)
式(10)中:Kp0、Ki0、Kd0為據經驗法整定的初始參數;ΔKp、ΔKi、ΔKd為需要修正的參數。
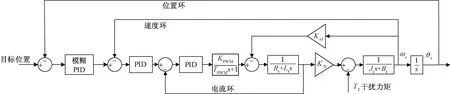
KPWM為PWM驅動環節放大系數;TPWM為PWM驅動環節延時周期;Rr為直流伺服電機電樞回路總電阻;Lr為直流伺服電機回路總電感;θr為直流伺服電機角位移;Kel為直流伺服電機反電動勢系數;KT1為直流伺服電機轉矩系數;Jr為等效轉動慣量;Br為直流電機阻尼系數圖6 電動缸模糊PID仿真程序框圖Fig.6 Block diagram of fuzzy PID simulation for electric cylinder
2.1.3 輸入輸出量及其隸屬度函數的確定
試驗臺以電機位置誤差和誤差變化率為輸入,將偏差e和偏差變化率ec作為模糊PID控制系統的輸入,模糊控制系統通過模糊推理方法輸出參數ΔKp、ΔKi、ΔKd,構造一個雙輸入三輸出的模糊控制器,語言變量的模糊集合為{NB,NM,NS,0,PS,PM,PB},由7個模糊值將集合劃分開,分別對應負大、負中、負小、零、正小、正中、正大。將輸入和輸出論域統一量化為{-3,-2,-1,0,1,2,3},使用三角形隸屬度函數,其分辨率和控制靈敏度較高。如圖7、圖8所示。

圖8 ΔKp、ΔKi、ΔKd隸屬度函數圖Fig.8 Membership function graph of ΔKp、ΔKi、ΔKd
2.1.4 模糊控制規則的確定
比例系數Kp可加快系統響應速度,但過大會產生較大超調,降低系統穩定性;積分系數Ki可加快消除穩態誤差,但過大會導致積分飽和;微分系數Kd可改善動態性能,但過大會使調節時間延長,降低系統抗干擾性。根據模糊控制規則和隸屬函數,采用Mamdani推理方法,以誤差和誤差變化為輸入,則第ij條模糊控制規則表達形式為
R:ife=μi,ec=μj,則μ=μij
(11)
式(11)中:模糊規則如表1所示。

表1 模糊控制規則Table 1 Fuzzy control rule
2.2 仿真試驗驗證
使用10 Hz的正弦信號對基于模糊PID的閉環主從張力控制器進行位置跟蹤考核,跟蹤圖和位置誤差如圖9、圖10所示。

圖9 10 Hz正弦信號位置跟蹤考核Fig.9 10 Hz sinusoidal signal assessment
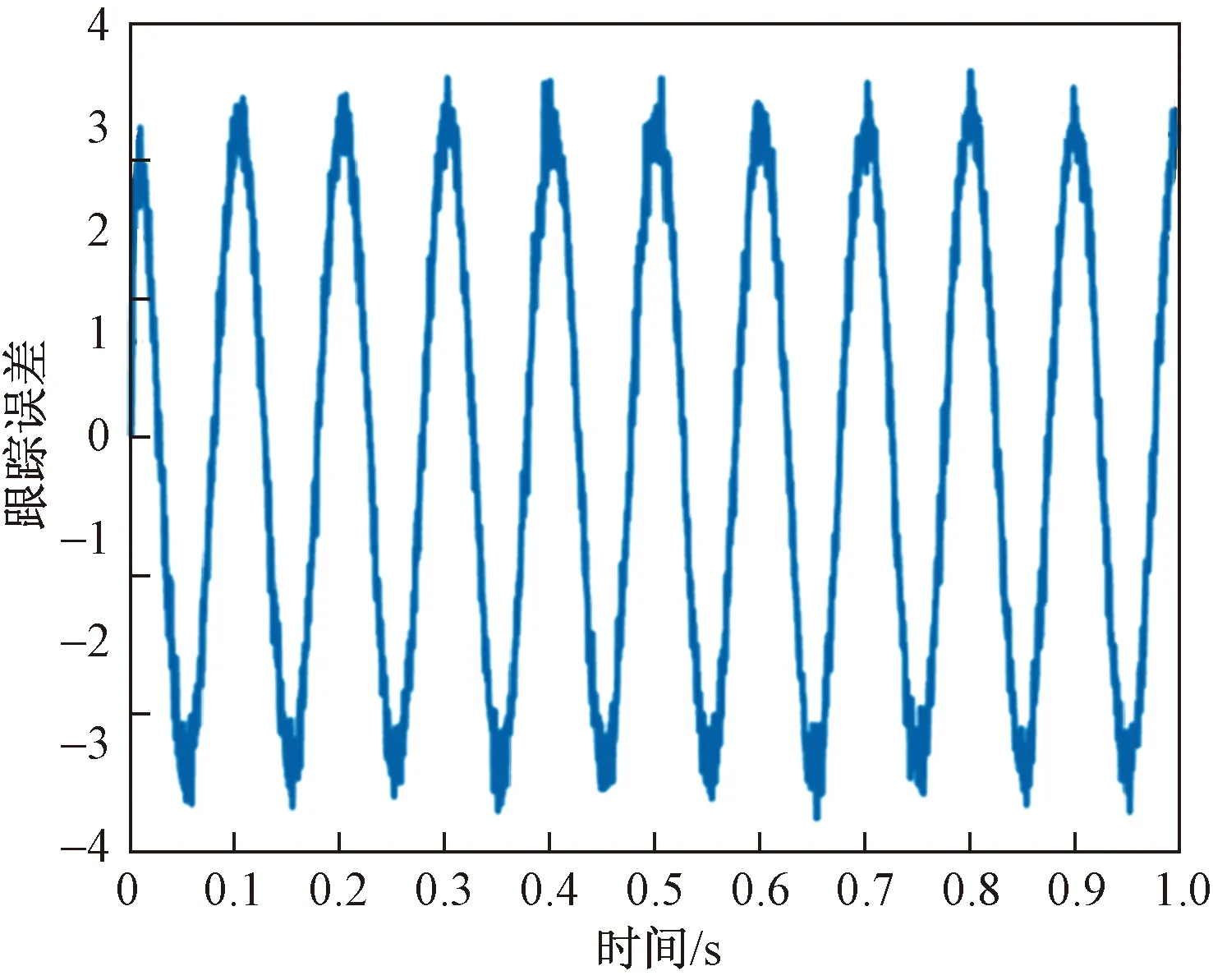
圖10 10 Hz正弦信號位置誤差Fig.10 10 Hz sinusoidal signal position error
從仿真結果可以看出,基于模糊PID的主從閉環控制器使得半物理加載機構具有良好的位置跟蹤性能和較小的位置誤差,能夠滿足系繩收放半物理裝置對于張力控制單元的控制性能要求。
3 拖曳模型仿真與試驗分析
3.1 仿真模型
根據主被動星在太空中的拖曳過程分析,建立圖11所示的系繩收放半物理試驗裝置Simulink仿真模型,為考核半物理試驗裝置工作原理的正確性,初始仿真參數及仿真后系繩穩定拉力值和系繩的最大變形如表2所示。

圖11 試驗臺工作原理Simulink仿真Fig.11 Test bench working principle Simulink simulation
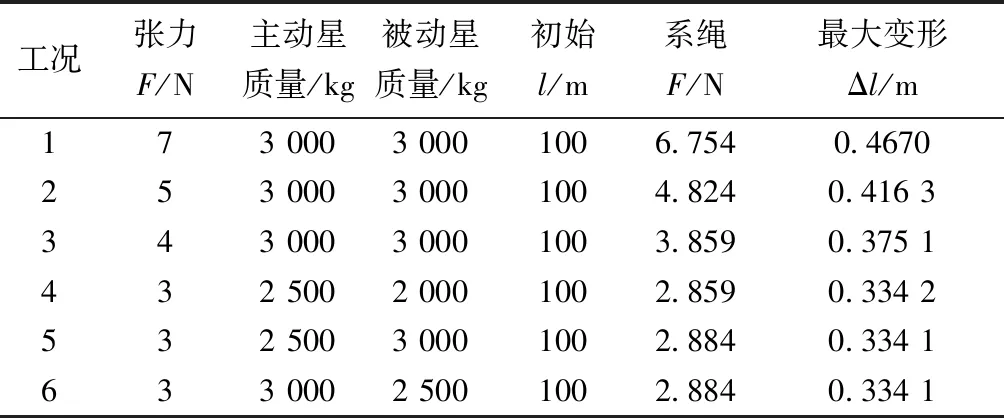
表2 部分仿真工況Table 2 Partial simulation conditions
3.2 仿真結果分析
仿真運行結果包括系繩拉力、系繩變形量以及主、被動星間的相對位置,如圖12~圖14所示。

圖12 系繩張力Fig.12 Tether tension

圖13 系繩變形量Fig.13 Tether deformation
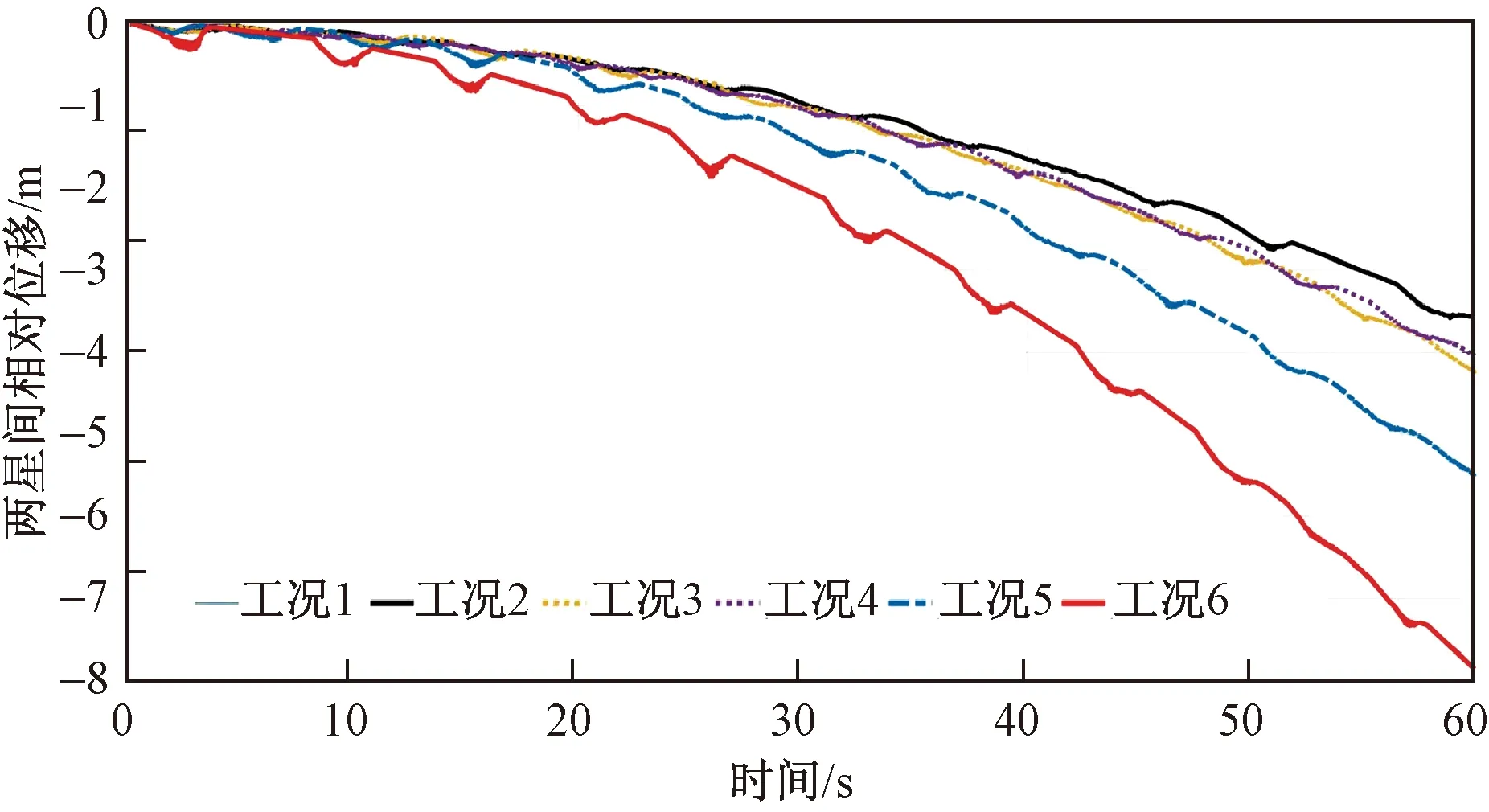
圖14 主、被動星間相對位移Fig.14 Relative displacement between active and passive star
可以看出:①目標張力指令為7 N時,張力誤差最大,可穩定在6.754 N,半物理加載機構張力控制器可實現系繩張力穩定;②目標指令在7 N時,系繩變形量達到最大值0.467,隨著衛星之間繩長的變短,相同張力下,變形量減少;③隨著目標張力指令的增加,張力誤差和最大繩系變形量隨之增加。
4 結論
設計了空間繩系系統的地面半物理試驗裝置,得到以下結論。
(1)半物理加載機構的張力控制器在基于模糊PID的主從位置控制策略下,具有較好的跟蹤性能和較小的位置誤差,可以滿足半物理加載機構對位置指令的控制要求,可較好地模擬被動星的收放性能。
(2)對整個半物理拖拽裝置建立Simulink仿真模型,驗證了在不同的初始工況下,張力誤差都可控制在一個較小范圍內,實現張力穩定控制,從而驗證半物理試驗裝置設計方案原理的正確性,可通過模擬不同工況下動力學模型特性,考核系繩收放裝置性能。
(3)對后期開展具體地面半物理仿真實驗提供了可行性支持。
猜你喜歡
井岡教育(2022年2期)2022-10-14 03:11:44
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
云南教育·中學教師(2020年9期)2020-11-16 00:27:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:00
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2017年9期)2017-12-20 08:11:28
家庭影院技術(2017年9期)2017-09-26 03:41:45