翻箱機增加冷凝水排放檢查口
2021-01-17 17:12:15蘭志勇
科學與生活 2021年32期
蘭志勇
一、現狀調查
翻箱機是行走的四軸機器人,除了通過滑觸線導電軌提供動力電源,無線模塊實現通信外,并無其他管路連接,為了實現機器人抱箱、取箱蓋、讀RFID等動作,系統設計并在機器人上安裝空壓氣自制設備。由于翻箱機工作周圍環境粉塵較大,并且在南方天氣較為潮濕,常常導致空壓氣帶水,導致氣動閥、氣缸、閥島等進水,損壞設備。
二、原因分析
空壓氣的自制過程是空壓機吸入環境空氣,進行壓縮、冷卻,將高壓氣水混合物排入儲氣罐,經儲氣罐底部排水后,高壓的空壓氣從儲罐中上部引出干凈、干燥的空壓氣供機器人使用。由于生產環境粉塵大、濕度大,導致吸入空壓機的空氣中含有大量的粉塵和水分混合物,所以儲氣罐的底部較臟,自動排水閥經常失靈(自動排水閥是靠浮球工作的,水位高時浮球抬起,閥開;水位低時浮球下落,閥關;當管路中是污物和塵土時,排水閥不能動作)。
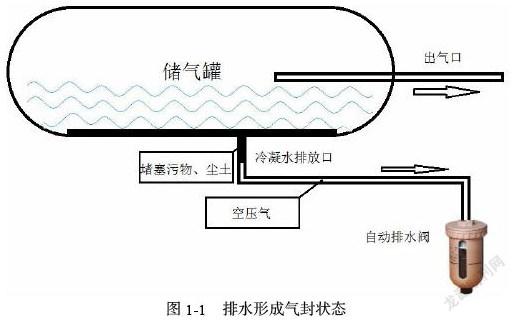
除了排水閥臟了不能排水外,還有一種情況是,自動排水閥是好的,但也排不了水。通過觀察發現翻箱機是間歇工作的,常常本次工作結束后儲罐水已排空,但儲罐底部留有污物和粉塵,當下一次再開機冷凝水來時,和前一次殘留的污物和成泥巴,導致儲氣罐底部的冷凝水排放管(細而長1米,管徑10毫米)堵塞。雖然空壓氣有壓力但在儲氣罐和排水閥之間形成氣封,即儲氣罐上部是空壓氣,底部是水,自動排水閥里是空氣,無法排水,如下圖1-1。
當冷凝水無法及時排放時,儲氣罐里的冷凝水達到出氣口時,水就會進入閥島,導致氣閥動作失靈,氣缸動作卡滯,甚至損壞閥島。
三、整改實施
針對發現的問題,雖然更換新的自動排水閥和清理儲氣罐的污物后能繼續使用,但什么時候再堵塞不排水無從知道,往往發現時為時已晚,給翻箱機的正常工作帶來極大的風險,為此,我們決定做如圖1-2的改動,就是在自動排水閥上端增加一個手動排水閥,有兩個好處,其一,定期打開排水,檢查儲氣罐里是否積水;其二,在打開排水時,當儲氣罐里有壓力時,可以對儲氣罐底部的污物進行排放清洗,使自動排水閥工作更可靠。
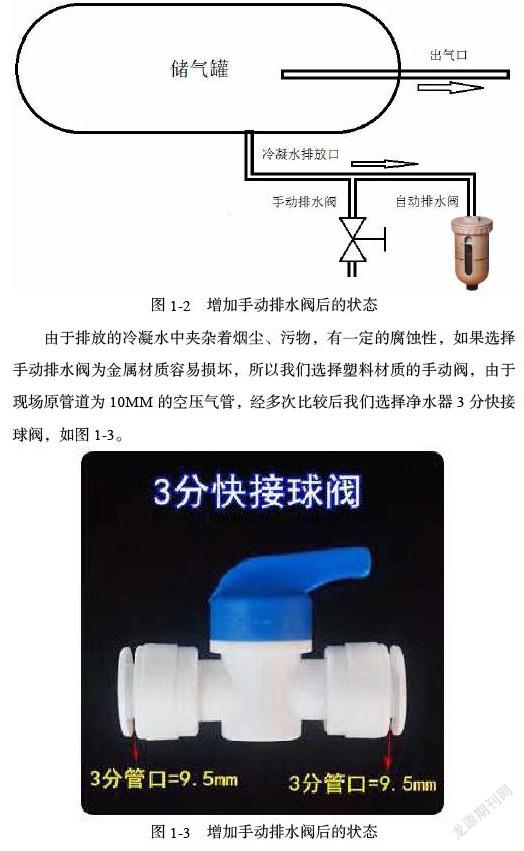
由于排放的冷凝水中夾雜著煙塵、污物,有一定的腐蝕性,如果選擇手動排水閥為金屬材質容易損壞,所以我們選擇塑料材質的手動閥,由于現場原管道為10MM的空壓氣管,經多次比較后我們選擇凈水器3分快接球閥,如圖1-3。
四、效果驗證
經過以上的改動,半年來,我們每星期對翻箱機儲氣罐進行手動排氣,每次都能排出一些積水和污物,由于將該動作列為定期的維修保養工作,所以翻箱機的工作更有保障。