大型油輪艏搖混沌現象的仿真與滑模控制
2021-01-18 07:15:54張顯庫
上海交通大學學報 2021年1期
張顯庫,韓 旭
(大連海事大學 航海學院,遼寧 大連 116026)
在航海實踐中,有經驗的駕駛員在操縱大型油輪時常常發現,即使在非惡劣海況下也很難讓船舶保持直線航行,船首呈現出一種不規則的隨機擺動,這種現象用常規理論來解釋非常困難.如果對這種異常現象不從理論上進行深入研究,可能會對航行安全和高效航運帶來不良影響,更會阻礙無人自主船舶的研究進程.相比于其他船舶,大型油輪往往旋回性好而直航性差,很可能是這一特性導致其更容易出現不規則艏搖的現象.本研究以大型油輪為對象研究不規則艏搖現象,所述研究方法也適用于具有類似特性的其他類型船舶.
船舶有6個自由度,但到目前為止橫搖運動中的混沌[1]仍是船舶混沌研究的主流,其他維度的研究則相對較少.文獻[2]總結了20世紀船舶非線性運動的研究狀況,這些研究主要集中在橫搖、垂蕩、系泊以及可能導致傾覆的打橫上.文獻[3-4]運用動力學方法研究了小型船在尾迎浪時的異常縱蕩,并指出船舶在特定海浪頻率與波長下會出現混沌瞬態以及長期混亂運動.事實上除橫搖外,航海實踐上最關心的是艏搖,因為艏搖直接影響航行的效率.考慮到船舶運動及海況干擾的非線性特性,本研究試圖直接用非線性系統理論中的混沌理論來解釋航海實踐中的異常艏搖現象.混沌現象是一種非線性動力系統中廣泛存在的確定性、類隨機的過程,這種過程沒有周期性且不收斂,對初始值敏感而難以掌控.目前針對艏搖混沌的研究相對較少,文獻[5]探討了能否用混沌理論來解釋異常艏搖,但該研究建立的混沌方程中,阻尼項和剛度參數范圍與實船情況差異較大.文獻[6]試圖改進文獻[5]中一些不合理的參數,并設計了魯棒控制器來控制混沌運動.盡管如此,文獻[6]中的個別參數,例如海浪頻率與浪高的描述在實際情況中是極為罕見的,因此其解釋仍無法讓人信服.文獻[7]嘗試使用Liu混沌系統重新解釋大型油輪的混沌艏搖現象,通過對所構造的船舶Abkowitz模型進行化簡和變形,發現所得結果與Liu混沌系統形似,但在深入分析后,得到的結果否定了用Liu混沌系統解釋的設想.文獻[5]在研究操縱閉環控制時使用了比例控制器模擬駕駛員的操縱,本文為了更真實描述有經驗駕駛員的操縱特性,引入了人的數學模型[8-10],從而再現操縱大型油輪過程中出現的混沌現象,為進一步設計有效的混沌抑制控制算法打下基礎.文獻[11-12]沿用文獻[6]的思路,給出了Duffing方程形式的混沌模型并使用自適應和滑模控制方法實現了參數不確定下航向保持的穩定控制,但最后未能給出所設計控制輸入與操舵舵角的對應關系.
反步法是非線性控制中的常見方法,它基于Lyapunov定理設計控制器從而保證被控系統的穩定[13].但此方法設計的控制器通常魯棒性不足,在干擾和參數攝動下控制效果會大打折扣.滑模控制是一種常見的魯棒控制方法,通過控制量切換引導系統狀態沿滑模面滑動,使系統在外部干擾和參數攝動下具有不變性.但在應用時要注意防止滑動模態上的抖振問題,目前代表性的解決方法有準滑動模態方法的邊界層設計、更改滑模面的趨近律的方法、濾波方法、觀測器方法、動態滑模以及智能控制優化等方法[14],本研究由于計算最終執行器輸出(即舵角)時,必然存在一個一階慣性項作用于滑模率,所以控制率本身不需要做進一步處理,舵角也不會出現劇烈抖振.從滑模控制率對舵角的影響來看,這相當于采用了濾波方法.
1 有經驗駕駛員的數學模型
駕駛員對系統的影響很復雜,但若粗獷處理的話可以認為主要是一系列延遲和增益的組合,文獻[5]所給出的駕駛員模型為轉艏速率誤差的比例模型,并未考慮駕駛員應變及操縱所需的時間,因而精確性和說服力相對不足,這里參照文獻[8]所提出的駕駛員模型,采用傳遞函數形式描述駕駛員對系統的影響,輸入和輸出分別為操舵角和航行誤差.
(1)
式中:GH(s)為傳遞函數形式的駕駛員模型;s為拉普拉斯算子;δ為舵角;Δψ為航向改變量;Kp為靜態船舶駕駛員增益,取值為1~300;τ為時滯,反映了駕駛員的固有延時特性,取值0.1~0.6 s,是駕駛員反應與動作的必要時間;e為自然常數;Tn為人體動作慣性常數,一般取0.1~0.2 s;Tl為大腦滯后補償時間常數,一般取1~30 s.

(2)
將式(2)代入式(1),并忽略低頻時(s=jω→0,j為虛數單位,ω為信號頻率)的二階和三階小量,式(1)可近似為一階模型

(3)
式中:Tp=Tn+τ+Tl.
2 船舶運動響應型非線性數學模型
船舶模型有多種形式,其中Nomoto模型因其簡單實用的特性而具有很高的使用率,但其推導過程需要使用昂貴的海試數據,否則需要使用Clarke整理的線性流體動力導數[15],而Clarke的研究發表于1982年,隨著近幾十年來船舶的大型化,其精度有所下降.在文獻[6]和[15]中給出了一種非線性的Nomoto模型,非線性項的增加使船舶的運動得到了更加準確的描述.具體如下:
(4)
3 船舶廣義數學模型混沌分析
Duffing方程是一種典型的混沌方程,其一般形式為
(5)
通過比較可知,式(5)與式(4)形似,故可以用Duffing方程研究船舶運動中的混沌現象.
將式(3)變成輸入為航向誤差的微分方程的形式:
(6)


(7)
由于海浪可用正弦波描述,船舶在海浪作用下的艏搖也表現出正弦性質,所以此處可用正弦波描述海浪作用下的艏搖,令式(6)中Δψ=Bsin(ω1t),針對T3與Tp相近的系統,再將替換后的式(6)代入式(7),可得:

(8)
式中:B為海浪對船舶的擺艏增益,取值范圍為0~2π;ω1為艏搖角頻率,其取值范圍依據海浪常見周期設定為0.25~1.25 rad/s,這里取ω1=0.25 rad/s;Kp=250,Tp=28,B=2.5.經過觀察發現,式(8)和(5)形式上很相似,所以預言當參數配置適當,船舶廣義數學模型有混沌解,船舶航向保持過程中存在混沌現象.
表1所示為大型油輪Davis Sea的船舶參數,計算得出相應參數為a1=0.087 74,a0=0.000 85,c0=48.864,b1=0.000 91.
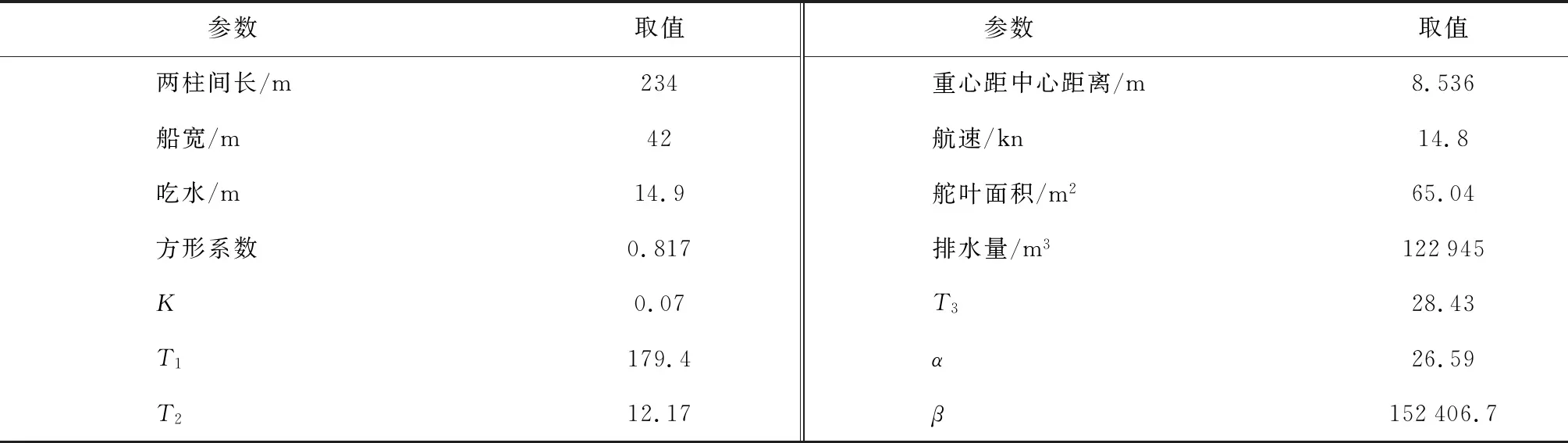
表1 大型油輪Davis Sea的船舶參數Tab.1 Ship parameter of large oil tanker Davis Sea
采用四階-五階Runge-Kutta算法(ode45)對該系統的狀態變化求解,初始值為(x1,x2)=(0,0),系統的相圖及分岔圖分別如圖1和2所示.相圖的橫縱坐標皆為狀態變量,由相圖可以看到系統狀態變量的變化軌跡.分岔圖則展現的是某一狀態變量隨系統參數的變化情況,其中虛點的部分意味著系統狀態的不穩定(不收斂),蘊含著發生混沌的可能.

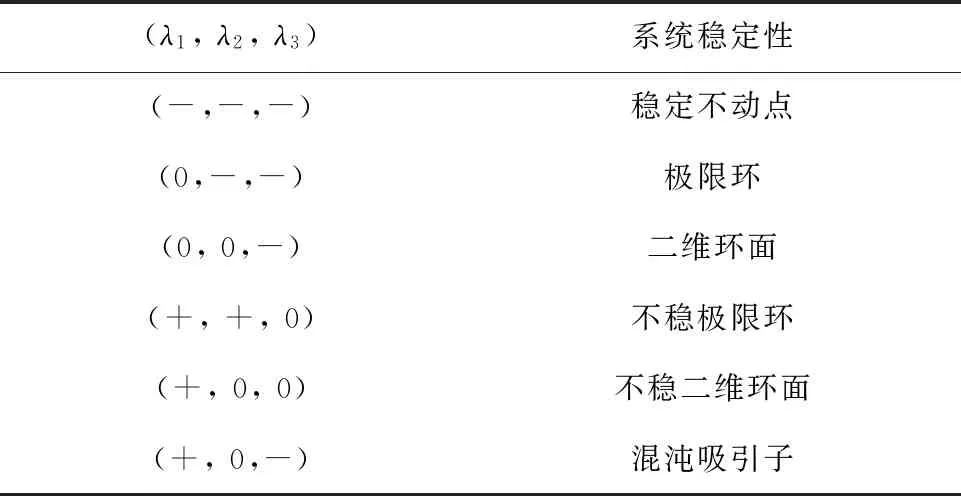
表2 三維系統Lyapunov指數與系統穩定性對應關系Tab.2 Correspondence between Lyapunov exponent and system stability in 3-dimensional systems
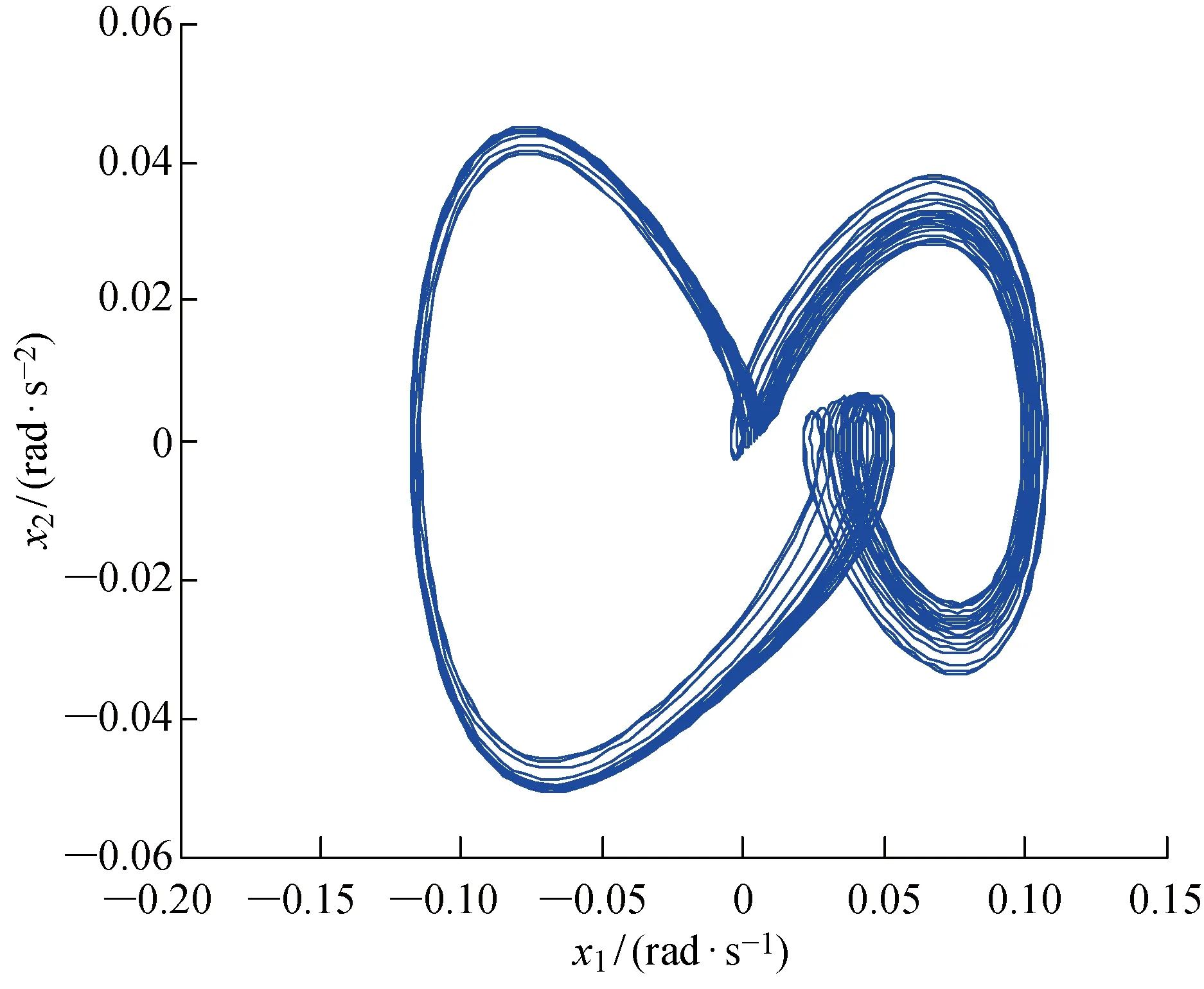
圖1 系統相圖Fig.1 System phase
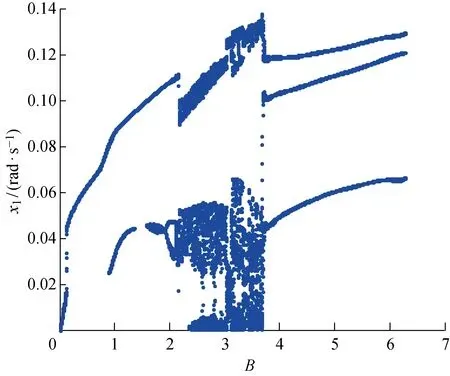
圖2 B=0~2π時的系統分岔圖Fig.2 Bifurcation diagram at B=0—2π
本文采用Jacobi方法求解Lyapunov指數,其基本原理是首先求解出系統微分方程的近似解,然后對系統的Jacobi矩陣進行QR(正交三角)分解,并計算其特征值的乘積,從而計算出系統的Lyapunov指數,具體的計算原理如下[17].
對于微分方程
(9)


(10)
J是F的Jacobi矩陣,式(10)的解可表示為
ε(t)=U(ε(0),t)
(11)
式中:U為ε(0)→ε(t)的映射,ε(0),ε(t)分別指ε在0時刻和t時刻的值.U的漸進行為可用指數λ表示為
(12)
系統的Lyapunov指數可定義為上述重復過程的均值,即

(13)
Lyapunov指數值隨時間的變化如圖3所示,最終迭代出的結果為λ1=0.008 718 9,λ2=0,λ3=-0.096 459,符合表2混沌吸引子的特性,故可以確定系統在此狀態下出現了混沌現象.
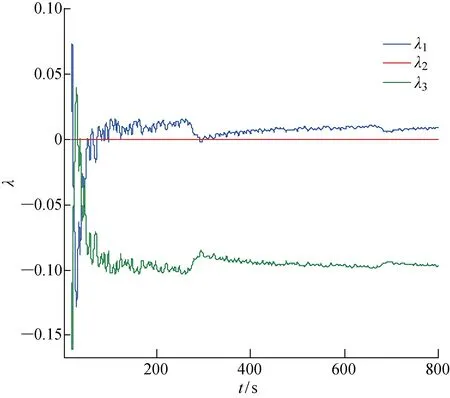
圖3 系統的Lyapunov指數Fig.3 Lyapunov exponents of system
功率譜形狀也是判斷混沌的途徑之一.功率譜圖的尖峰意味著周期性,而混沌運動功率譜不再出現離散的譜線,像噪聲一樣是連續的過程.圖4給出了此時的系統功率譜(PSD),可見無法從噪聲中區分明顯的尖峰,這意味著沒有顯著的周期性,進一步佐證了混沌的發生.

圖4 系統功率譜Fig.4 Power spectrum of system
為直觀展示混沌與艏搖的關系,圖5給出了狀態變量x1(即轉艏角速度r)隨時間的變化情況.可以看到,雖然約每25 s船舶會完成一輪艏搖,但艏搖的過程不盡相同,具有非周期性和混沌特點.
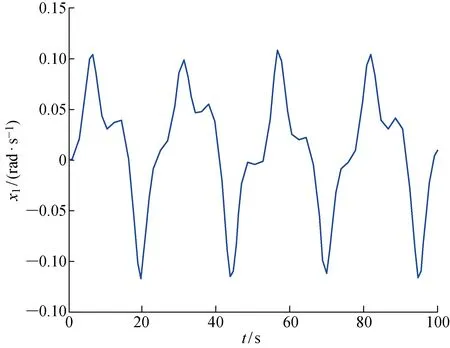
圖5 狀態變量x1隨時間變化曲線Fig.5 Time curve of state variable x1
通過進一步調整參數ω1我們發現,在B的取值范圍內,當Kp、Tp不變而ω1增大時,導致混沌發生的B的初值增大;相應地,當ω1減小時會使能造成混沌的B初值減小.但無論ω1過大還是過小都會導致混沌現象的消失(ω1取值范圍決定了本例不存在混沌消失下界).就式(8)規定的系統來說,這一規律具有普適性,只是針對不同船舶,ω1和B的臨界值會有所改變.如圖6所示,經過測試,油輪Davis Sea可以導致艏搖混沌的海浪區間為0.25 rad/s≤ω1≤0.38 rad/s.由以上分析可以確定,海況穩定時遇到不規則艏搖極可能為混沌現象.
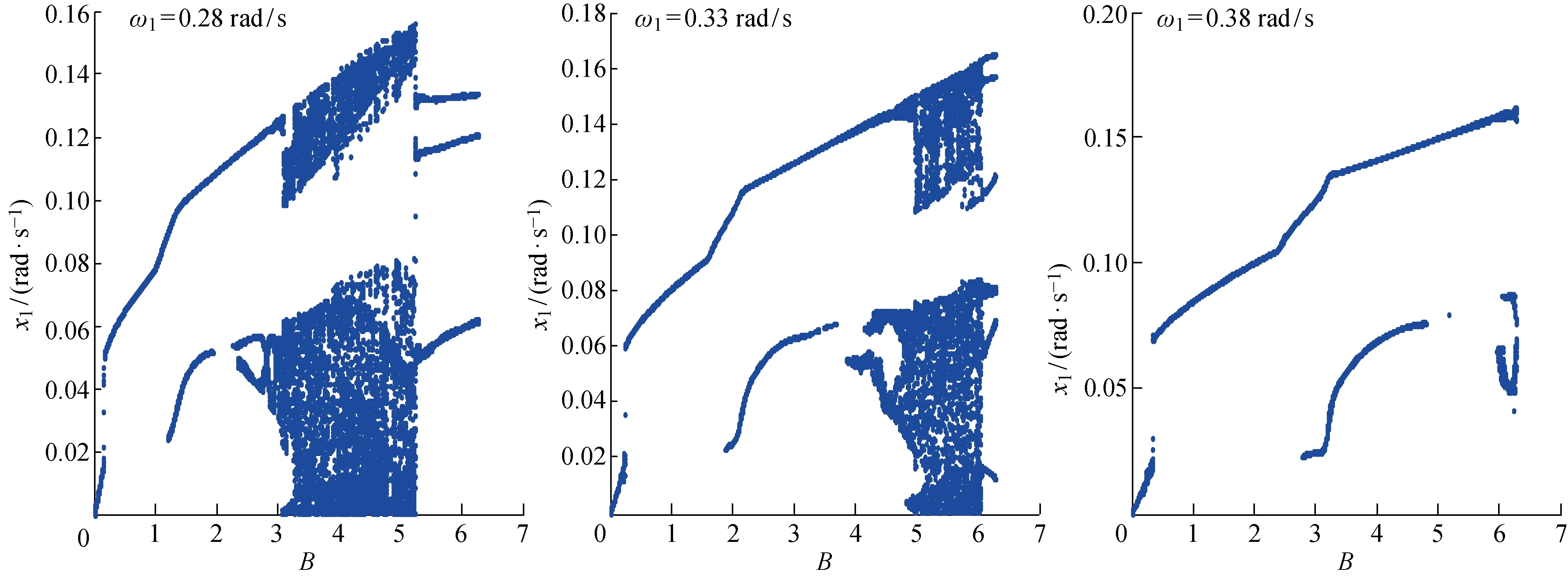
圖6 不同角頻率下的系統分叉圖Fig.6 System bifurcation at different angular frequencies
4 基于反步法的滑模控制
為控制式(8)所示系統,在式(8)的第2式后加入一個控制項u,使被控系統變為
(14)


(15)

(16)
式中:x2d為x2的控制目標值.定義關于x2的誤差變量γ,
γ=x2d-x2
(17)
將式(16)、(17)代入式(15),得到

(18)
而

(19)

(20)

(21)

|f||γ|-ρ|γ|-k1e2-k2γ2≤
ρ|γ|-ρ|γ|-k1e2-k2γ2=
-k1e2-k2γ2
(22)
使用式(7)來獲取舵角δ,即

(23)

5 仿真結果
代入相關數據,設定B=2π(取最大可能值,若此條件能控,更小的值必然能控),取ρ=0.07,k1=k2=1,控制前后的艏搖速率和控制舵角如圖7和8所示,仿真結果以角度制表示以便直觀理解.控制作用施加于80 s,舵角限幅20°.
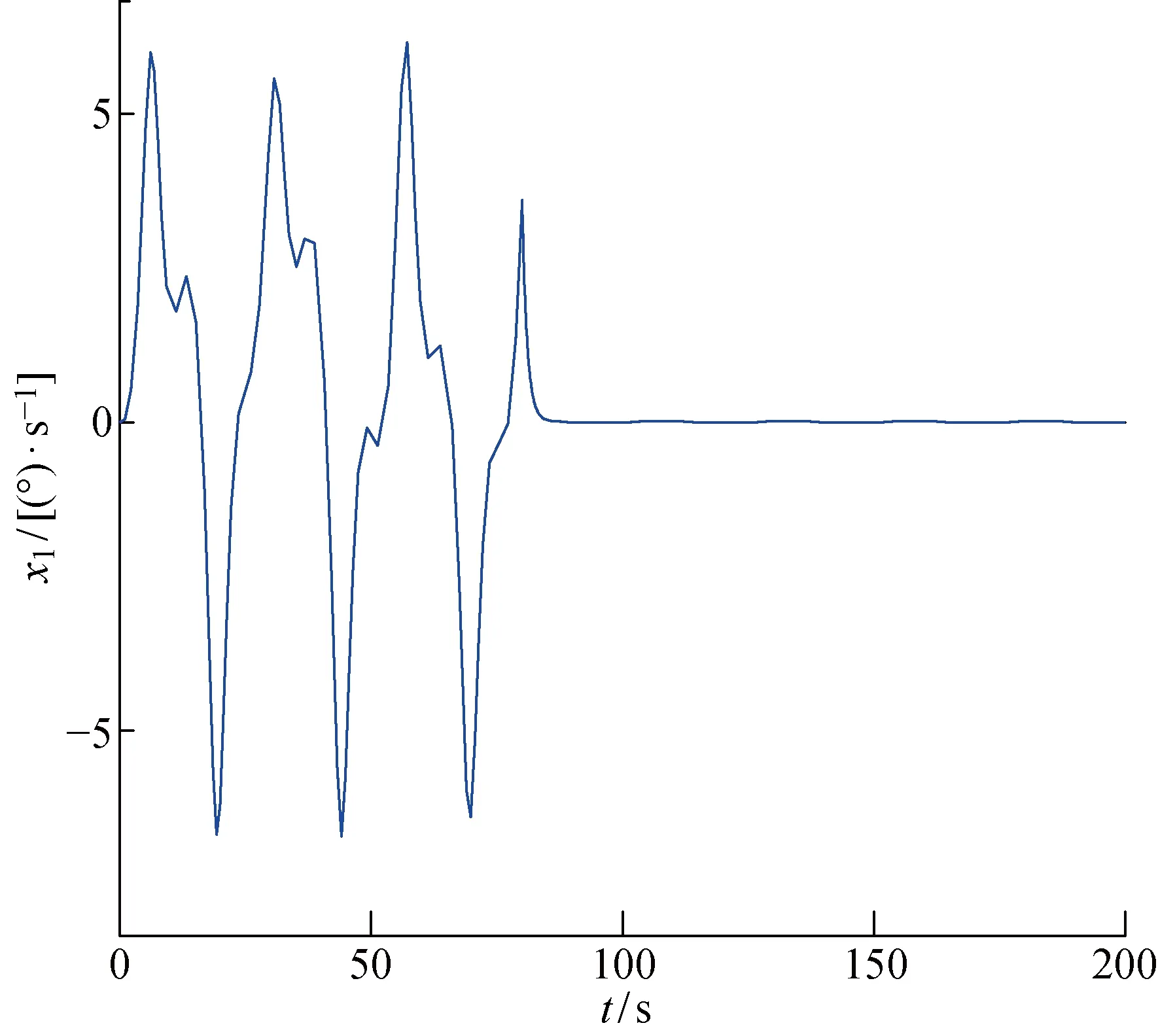
圖7 控制前后轉艏速率Fig.7 Turning rate before and after control
由圖7可以看出未加控制時系統處于混沌艏搖狀態,應用控制后航向迅速穩定,|x1|的最大值從6.6°/s降到0.12°/s,積分后可知航向穩態偏差小于0.07°.由圖8可知控制舵角絕對值最大為17.2°,穩定舵角絕對值最大為5°,控制效果令人滿意.
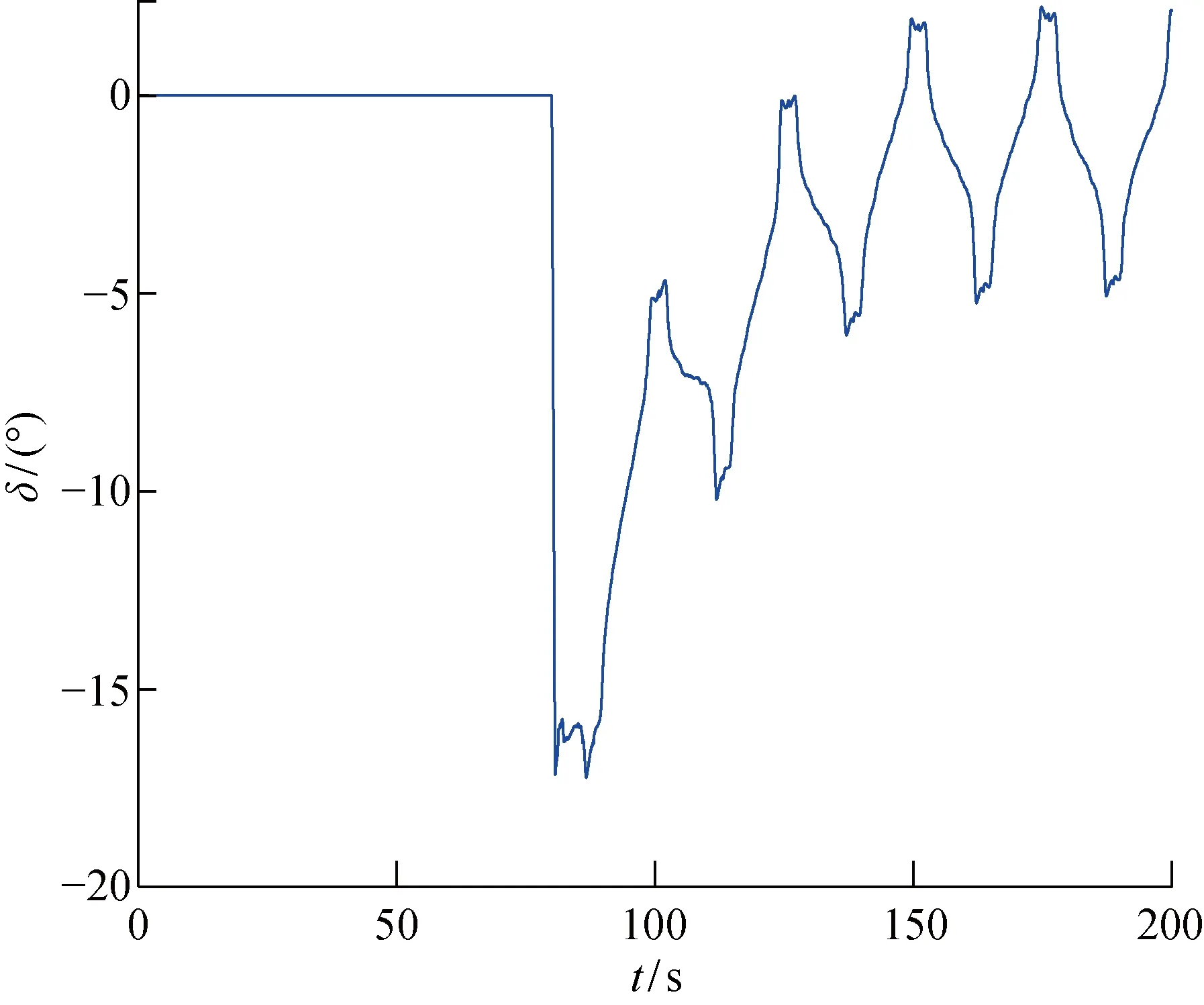
圖8 控制舵角Fig.8 Controlling rudder angle
6 結語
大型油輪的不規則艏搖確實可以用混沌理論解釋.由于船舶性能與迎浪幅頻的差異,艏搖模型參數存在著變動區間,變動區間內存在能造成混沌的部分,因此這種不規則艏搖是可能發生的.不規則艏搖現象得到了相對合理的解釋,造成混沌的參數區間也已得出.為避免不規則艏搖,又針對所建模型提出了相應的滑模控制率,避免了測量海浪頻率的同時改善了控制系統的魯棒性,為消除混沌艏搖的不利影響給出了一種不錯的思路和方案.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學技術(2022年14期)2022-09-22 03:07:40
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
船舶(2021年4期)2021-09-07 17:32:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
光學精密工程(2016年6期)2016-11-07 09:07:19
公民與法治(2016年4期)2016-05-17 04:09:26