
一種新型光電纜線敷設車研究
2021-01-18 03:56:38謝澤兵
機電工程技術 2020年12期
謝澤兵
(廣東省機械研究所有限公司,廣州 510635)
0 引言
近年來,我國新一代信息通訊網絡,特別是5G通訊網絡正在急速發展和加快建設,而光纖通信為現代信息通訊的重要手段,也是5G通訊網絡的重要組成部分[1-2]。光電纜線敷設是光纖通信的基礎,當前光電纜線敷設技術主要有架空敷設、直埋敷設、管道敷設和隧道敷設4種,中國目前普遍采用管道敷設方式。管道敷設方式因其管道埋于地下,管道通常分段布置且直徑較小,施工過程中穿纜、拉纜、收纜、倒纜等多種作業需同時進行,加上光電纜線質量重、線徑大、收放困難等特點,造成管道敷設作業相對其他方式更為困難,中國目前尚未有針對光電纜線管道敷設施工而研發制造的一體化多功能全自動專用設備;美國、日本等西方發達國家,因具有成熟、完善的地下隧道系統基礎設施,其城市光電纜線敷設主要為利用現成的地下隧道系統進行隧道敷設[3-4],沒有先進設備可以借鑒引進,因此迫切需要研發一種專用的新型的全自動光電纜線敷設設備,以解決電纜線管道敷設施工困難。
1 光電纜線敷設設備需求分析
光電纜線由于質量重、線徑大、收放困難,作業時對敷設場地的空間需求大,加上中國正在加快5G 通訊網絡建設,目前光電纜線路建設工程量巨大,同時中國電纜敷設作業地域遼闊,可見未來光電纜的敷設工作必將越來越繁重[5]。為了加快和保障我國5G 通訊網絡建設,跟上中國新一代通信網絡建設和強國的需求,及時、高效、高質完成光電纜線敷設是基礎保障[6]。目前國內在光電纜線敷設方面的設備均功能單一、結構簡陋,基本只有放纜功能或牽引功能,更缺乏自動化操作。光電纜線管道敷設施工更主要依托人力進行,且大部分光電纜線施工中最繁重的拽拉作業全部采用人力徒手作業。據統計,光電纜線管道敷設施工10 人同時作業,全天最快施工長度不超過5 km,不僅效率十分低下,且費時、費力、效益低。隨著5G 通訊網絡加快建設,此種作業方式必將滿足不了需求,此外由于5G 通訊網絡的全面建設,光電纜線敷設施工分布在全國各地,其中不僅有城市,也有很多處在野外偏遠地區,工人在進行光電纜線施工時往往要長時間暴露在嚴寒、高濕、高熱、高原、強紫外線等野外惡劣環境中,惡劣的環境對工人的身體健康威脅巨大[7-8]。
針對當前光電纜線敷設設備功能單一、自動化程度低的特點,光電纜線管道敷設施工中拽拉作業主要依托人力進行,為進一步提高光電纜線敷設速度,研究一種工作可靠性強、自動化程度高、移動能力好的新型設備,可降低工人作業強度、減少敷設作業時間,提高光電纜線鋪設效率和質量,且該設備整體結構堅實耐用、操作方便簡單,施工工人通過必要的培訓即可快速應用。
2 新型光電纜線敷設車設計
2.1 設計分析
根據光電纜線敷設設備的需求,本研究重點在解決光電纜線管道施工中人力拉纜、倒纜等拽拉作業存在的費時、費力、效率低下問題,并適用各種不同地域環境和滿足不同線徑光電纜線的敷設作業。
在研究方向確定后,對研究的設備進行設計分析,并提出如下結構、功能構想。
(1)研究的設備應是一種帶輪子,可被拖行的新型光電纜線敷設車,該車配合保障車輛,具備快速移動能力,可適應各種不同地域環境。
(2)該車應堅固耐用,采用自動化、智能化控制系統,操作簡單,工人只需簡單培訓即可使用。
(3)該車應集合光電纜線收纜、放纜、拉纜、倒纜、排纜、收放長度計量等功能,具備全自動獨立作業能力,由機械力代替傳統人力作業。
(4)該設備應可以快速更換光電纜線絞盤,可以滿足多個不同絞盤光電纜線的自動收放作業。
(5)該車通過簡單設置可以滿足不同線徑光電纜線的敷設作業,同時可以實現光電纜線設定長度的全自動有序收放。
2.2 設計方案
在設備的結構、功能和定位明確后,就可對新型光電纜線敷設車進行整體結構設計及工作原理設定。下面介紹依據以上構想設計好的新型光電纜線敷設車的機械結構和工作原理。如圖1~2所示。
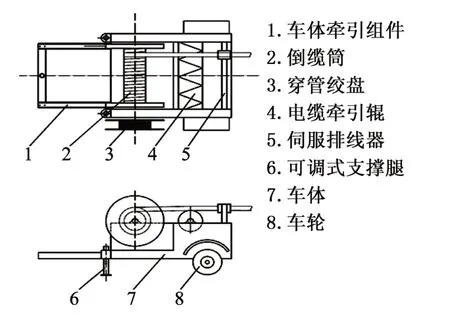
圖1 機械結構示意圖
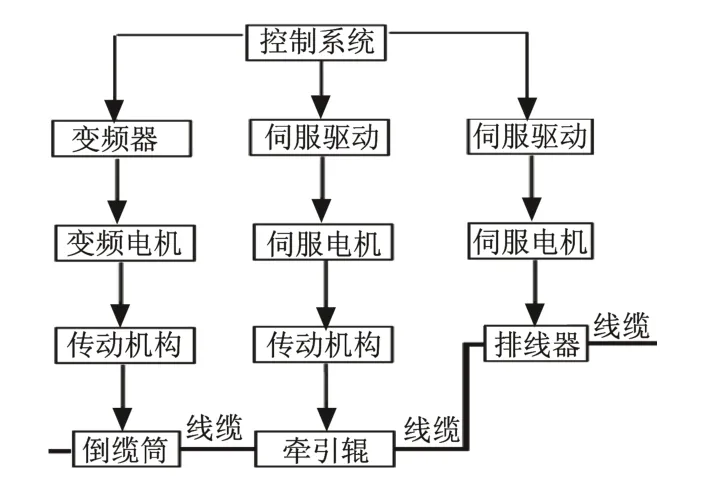
圖2 工作原理示意圖
2.2.1 機械結構及工作原理
結合圖1~2對新型光電纜線敷設車的各機構作用及工作原理作進一步介紹:倒纜筒安裝在車體前側上部,用于承載光電纜線絞盤,其由變頻電機驅動旋轉,且具有正反向旋轉和可拆卸功能,可更換不同光電纜線絞盤,滿足多個絞盤光電纜線的收放作業;線纜牽引輥安裝在車體中部位置,用于牽引光電纜線,其由伺服電機驅動,具有正反轉旋轉和長度計量功能,作業時與倒纜筒配合將光電纜線收拉盤繞在倒纜筒上或從倒纜筒上拖放出,并同時計算收放的光電纜線長度;伺服排線器安裝在車體后側,由伺服電機驅動,并具有左右移動功能,作業時其與線纜牽引輥和倒纜筒配合,在光電纜線收拉盤繞或拖放時,均勻有序逐圈緊挨地盤繞在光電纜線絞盤上或從光電纜線絞盤上有序平穩釋放出;穿管絞盤安裝在車體左側,盤上設置有穿管,通過離合器可由倒纜筒的變頻電機驅動旋轉,用于線纜穿管作業;牽引組件安裝在車體前側上,用于倒纜筒拆卸更換光電纜線絞盤時,輔助其上下車體,及用于固定在保障車尾部被牽引行駛;車體兩側安裝有車輪及可調式支撐腿,用于設備行駛移動及固定作業時的支撐。此外電氣控制系統安裝在車體右側,設備驅動電源采用外接電源。
2.2.2 控制系統
在光電纜線敷設車整體結構和工作原理確定后,對控制系統進行設計,圖3所示為設備控制系統界面。
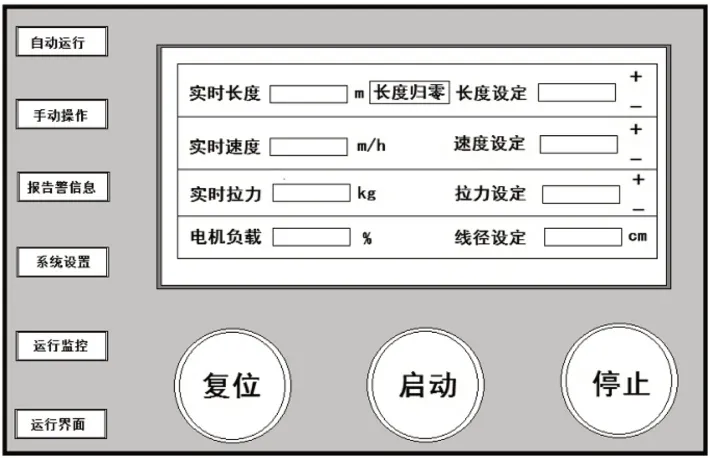
圖3 控制系統界面
本研究的電纜線敷設車控制系統除滿足整車機械工作所需功能外,還具有以下自動化、智能化和機械、電氣安全保護功能。
(1)系統設置有安全緊急開關,當發生緊急情況時,控制系統可以在保護光電纜線的同時,緊急收放停機。
(2)系統設置有調速功能,可根據不同施工環境或作業條件,無極調節光電纜線的收放速度。
(3)系統設置有自動排纜功能,可根據輸入作業的光電纜線徑,即可以使光電纜線緊密地纏繞在光電纜線絞盤上或有序平穩釋放。
(4)系統設置有智能感知功能,設備作業過程中可根據輸入作業的光電纜線徑,自動計算合適的拉力,同時可以對設備的運行進行實時監控、監測,當設備運行過程中發生拉力過載、纜線脫、斷等故障時,發出聲、光警報。
(5)控制系統具有自動收放線功能,系統不僅具有光電纜線的收放長度精確計算功能,還可根據不同作業要求下設定的收放長度,進行全自動收放運行。
3 結束語
本文所研究的新型光電纜線敷設車采用自動化、智能化控制系統,集合光電纜線的收纜、放纜、拉纜、倒纜、排纜、長度計量等功能于一體,將機械作業替代以往光電纜線管道施工中的人力徒手作業,設備整體結構簡單、結實耐用,不僅可應用于城市管道的光電纜線施工,也可應用于各種地域環境的光電纜線施工。該車已經取得國家實用新型專利,并已開展成果應用試驗,將為管道光電纜線施工,提供更經濟、省時、省力的解決方案,使施工效益提高了近10倍,并助力新一代信息通訊網絡的加速建設。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
中國特種設備安全(2022年6期)2022-09-20 02:52:28
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
電子制作(2018年11期)2018-08-04 03:26:08
中國科技論壇(2017年7期)2017-07-25 08:49:53
故事大王(2016年7期)2016-09-22 17:30:08
工業設計(2016年12期)2016-04-16 02:52:00
消費者報道(2014年7期)2014-07-31 11:23:57
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55
中國中醫藥現代遠程教育(2014年16期)2014-03-01 04:28:54
