P2混合動力發動機啟動控制設計
2021-01-18 07:47:40莫崇相修彩靖梁萬武
中國機械工程 2021年1期
關鍵詞:發動機
莫崇相 修彩靖 梁萬武
廣州汽車集團股份有限公司汽車工程研究院,廣州,511434
0 引言
混合動力車輛在實際應用中越來越普及,目前混合動力主流分別是以豐田雙擎混動系統(Toyota hybrid system,THS)為代表的雙電機功率耦合和以大眾P2構型為代表的單電機扭矩耦合。THS構型[1]的功率耦合特點使THS在動力耦合[2]方式以及發動機經濟轉速的靈活性調節方面具有很好的優勢,但相對于P2雙離合器自動變速器(double clutch transmission,DCT)混合動力構型,THS構型在成本[3]和動力響應方面顯得弱勢。此外,雙離合器自動變速器在國內企業具有良好的研發和生產基礎,結合以雙離合器自動變速器為基礎的P2混合動力在成本、動力響應以及企業生產基礎的優勢等綜合考慮,采用P2雙離合器自動變速器構型的混合動力在國內企業具有良好的現實意義。發動機的啟動控制技術是混合動力動態控制的關鍵技術之一,也是控制研究的熱門領域。本文對P2雙離合器自動變速器構型的混合動力發動機啟動[4-6]控制進行了設計研究,并驗證了發動機啟動控制的魯棒性和平順性可為混合動力的性能提供有力的保障。
1 P2混合動力車輛模型
為更好地研究啟動過程動力傳遞控制算法,假設P2混合動力車輛的動力傳遞模型為剛性模型[6],同時又考慮到車輛動力系統相關彈性變化,本文將車輛傳動效率因子η引入剛性模型計算中。該車輛剛性動力模型如圖1所示,圖中相關模型參數如下:Je為發動機轉動慣量;ωe為發動機轉動角速度;Te為發動機飛輪端扭矩;Jk為K0離合器轉動慣量;ωk為K0離合器轉動角速度;Tk為K0離合器扭矩;Tr為K0離合器處等效殘余扭矩;Jm為電機轉動慣量;ωm為電機轉動角速度;Tm為電機實際輸出扭矩;Jc為雙離合器轉動慣量;Jp為車輪至雙離合器端等效到輸入軸上的轉動慣量;ωp為輸入軸轉動角速度;ωw為車輪轉動角速度;Tt為傳遞到車輛端扭矩;τ為總傳動比。
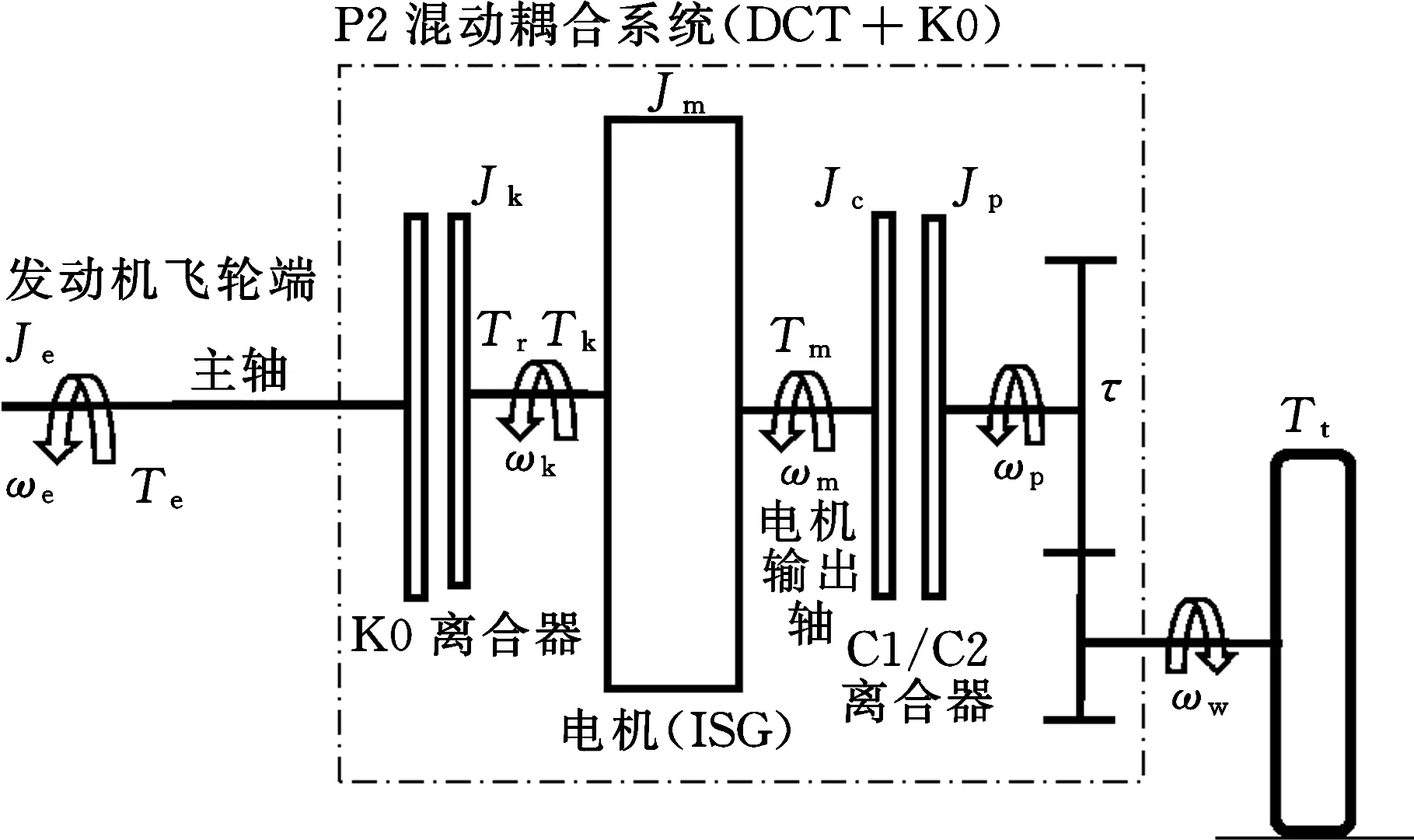
圖1 P2動力總成車輛剛性模型Fig.1 Vehicle rigid model of P2 powertrain
在上述模型中,發動機的扭矩包括兩部分意義:驅動時表示凈輸出驅動力,啟動開始時表示發動機啟動阻力矩[7]。發動機的扭矩和電機的扭矩經由K0離合器[4]進行耦合,然后由雙離合器傳遞到變速器再傳遞到車輪端從而驅動車輪行駛。在發動機啟動過程中,除了耦合驅動力與雙離合器之間的傳遞外,還存在發動機和電機經由K0離合器的動力耦合,因此在計算動態過程啟動控制時假設雙離合器是閉合的或完全打開的狀態(沒有換擋或沒有滑摩損失)。基于此,依據最復雜的發動機啟動過程對該模型進行分析。
K0離合器接合 (穩態驅動) 時
(1)
K0離合器滑摩 (啟動) 時
(2)
(3)
2 啟動過程設計及控制計算
2.1 發動機啟動控制設計
根據P2混合動力構型的特點,發動機啟動過程包括3種車輛工況,分別為靜置工況發動機啟動、起步工況發動機啟動、行車工況發動機啟動。上述3種工況的發動機啟動控制設計分別如圖2~圖4所示,其中,S、M、E、K分別表示控制轉速曲線、電機扭矩曲線、發動機扭矩曲線、K0離合器扭矩曲線,字母后的數字表示曲線上各點的位置。從啟動的特點來看,3種工況的發動機啟動過程均包括電機拖動提速控制、發動機點火控制、扭矩耦合控制這3個共同的控制階段。此外,在靜置工況發動機啟動時,雙離合器處于打開狀態,沒有車輛慣量的介入,為更好地調節啟動時的轉速變化,在該工況下需要增加轉速耦合控制以及耦合至怠速充電控制這兩個部分。
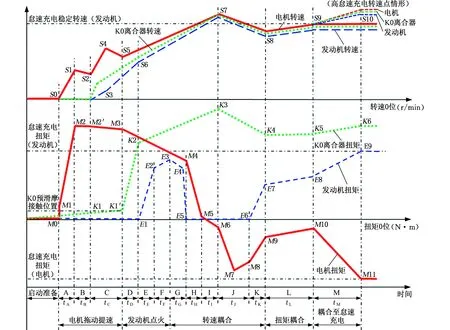
圖2 靜置工況發動機啟動過程控制Fig.2 Engine start control in stand operation
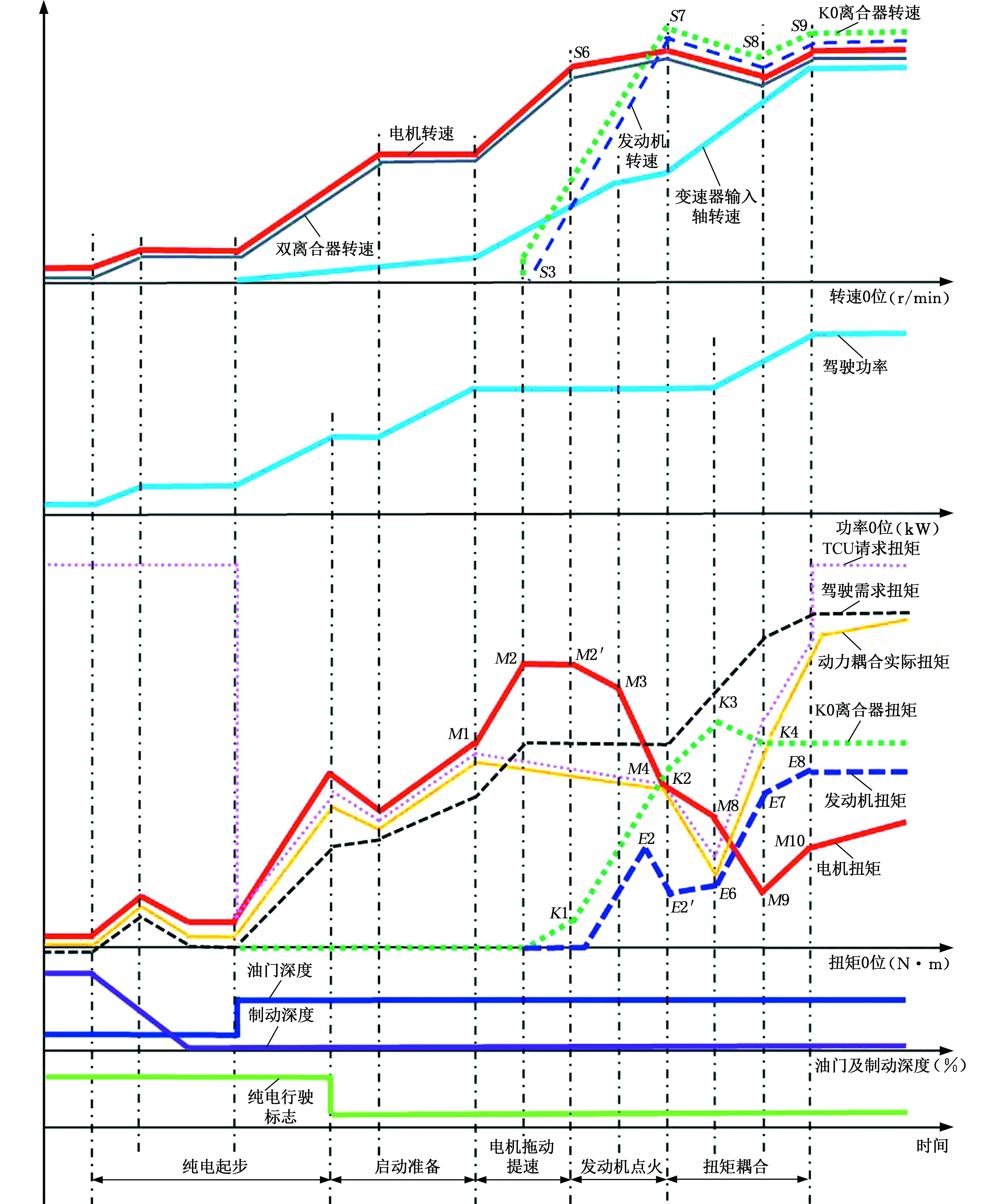
圖3 起步工況發動機啟動過程控制Fig.3 Engine start control in pick up operation
在起步及行車工況發動機啟動過程中,其相應階段的扭矩點標識基本與靜置工況發動機啟動過程的扭矩點標識保持一致,其控制過程中的計算也與靜置工況基本類同,因此本文的動力計算分析只圍繞靜置工況的啟動過程來展開。
圖3和圖4所示均為車輛非靜置工況下的發動機啟動工況,其電機拖動提速、發動機點火以及扭矩耦合這3個階段的控制計算公式可參照靜置工況發動機啟動過程中相應的控制目標。本文以靜態工況下的發動機啟動控制為例進行說明。靜置工況啟動過程可劃分為5個階段,下面將對各階段控制節點進行動力計算分析并給出相應的控制需求說明。
(1)電機拖動提速階段。這一階段包括電機快速啟動(A階段)、電機峰值扭矩(B階段)、電機轉速提升(C階段)。
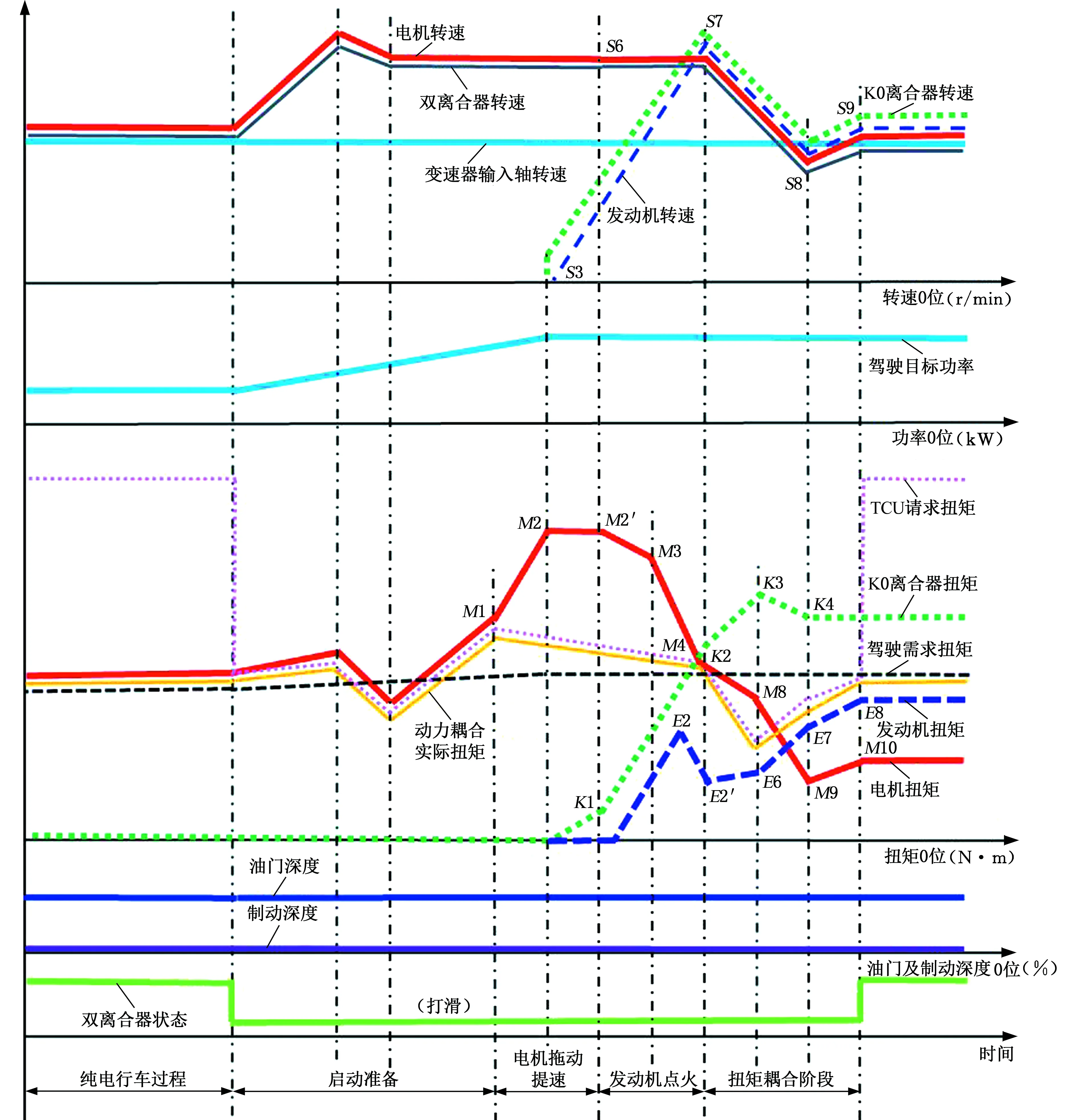
圖4 行車工況發動機啟動過程控制Fig.4 Engine start control in driving operation
(2)發動機點火階段。這一階段包括拖動發動機(D階段)、發動機點火噴油(E階段)、發動機轉速提升(F階段)。
(3)轉速耦合階段。這一階段包括發動機停止噴油(G階段)、電機快速降扭(H階段)、電機扭矩過零控制(I階段)、電機調速(J階段)、發動機恢復噴油(K階段)。
(4)扭矩耦合階段。此過程主要是將前面由電機主導的耦合控制轉變為由發動機主導的耦合控制(L階段)。
(5)耦合至怠速充電階段。該階段是將發動機和電機已經耦合的扭矩提高至充電目標的耦合扭矩(M階段)。若怠速充電目標轉速發生變化時,則需先對轉速進行耦合至目標轉速,如圖2中右上方在此階段的3條同轉速虛線(從上到下)分別代表電機、K0離合器和發動機的轉速在高怠速轉速工況下充電可能的情形。
此外,為進行相關扭矩計算及控制過程時間的估算,需要引入K0離合器、發動機、電機扭矩及轉速響應能力的基本邊界參數,這也是后面分析啟動過程動力學目標計算的基礎和邊界,具體定義如下:Im,Mx為電機扭矩響應能力;Ik,Mx為K0離合器扭矩響應能力;Ie,Mx為發動機扭矩響應能力;Im,Mx,0為電機過零扭矩響應能力;Im,Jk為電機轉速響應能力;Ie,Jk為發動機轉速響應能力;Ik,Jk為K0離合器轉速響應能力。
2.2 電機拖動提速控制
圖2中的電機拖動提速控制階段又可分為A、B、C 3個控制子階段,下面將分別從這3個階段進行介紹。
(1)A階段:電機快速啟動。M1處扭矩為電機初始扭矩,可通過標定選擇一個比較固定的初始值,通常電機初始扭矩取20 N·m,以便于整個過程控制。M2處扭矩為電機拖動峰值扭矩,該值受到發動機啟動阻力的大小、啟動環境工況、離合器扭矩從K1至K2的最短響應時間以及發動機轉速從S3上升到S6的最短響應時間等因素影響。電機在S1處的轉速和A階段的控制時間分別由下式求得:
(4)
(5)
(2)B階段:電機峰值扭矩。M2′處扭矩值與M2處扭矩值可保持一致,該過程受到電機啟動峰值扭矩響應穩定控制性能以及該階段控制時間的影響。該階段的控制時間tB通過標定進行確定。考慮到K0離合器存在拖拽,則S2處電機轉速可由下式求得:
(6)
(3)C階段:電機轉速提升。M3處扭矩是保證K0離合器能夠穩定拖動發動機轉速達到噴油轉速S6(S6處發動機轉速值與S5處電機轉速值相同)所需的扭矩,其表達式如下:
(7)
C階段的控制時間可由下式確定:
(8)
2.3 發動機點火控制
當電機的拖動扭矩和轉速達到相應的控制要求后,K0離合器開始快速接合以拖動發動機轉速快速上升至噴油轉速(即S6處轉速),此后發動機開始噴油并輸出扭矩,然后與K0離合器扭矩進行耦合,該耦合扭矩用來進一步推高發動機轉速至怠速轉速。此階段可具體分為如下3個子階段進行計算分析。

(9)
D階段的控制時間可由下式求得:
(10)
(2)E階段:發動機點火噴油。E2處扭矩為發動機空怠速穩定扭矩,一般根據實際各工況進行標定。
(3)F階段:發動機轉速提升。在此過程中發動機轉速繼續提高,取S6至S7轉速差的0.5倍(具體可標),將提升該轉速值所需的扭矩作為控制目標,并考慮電機扭矩降低帶來的影響,則可以計算出此時發動機需要達到的目標扭矩:
(11)
F階段的控制時間可由下式確定:
(12)
2.4 轉速耦合控制
傳統車輛的發動機啟動噴油后,發動機的轉速調節一般通過發動機自身去控制調節。而P2混合動力因為電機的存在,可為發動機啟動時的轉速調節提供另一條有效的途徑,即通過電機的扭矩對發動機轉速進行調節,由于電機具有控制精度高和響應快等特點,故可以較為精確地控制整個動力鏈耦合的轉速波動。此階段可具體分為如下5個子階段進行計算分析。
(1)G階段:發動機停止噴油。在靜置啟動工況,此時的發動機停止噴油,這代表凈輸出扭矩為0(即圖2中E5處發動機扭矩為0)。而在起步工況和行車工況則不存在通過發動機斷油(停止噴油)來快速降低扭矩的需求,而是直接由E2處扭矩切換到E6處扭矩。M4處電機扭矩根據實際情況進行標定,一般情況取K2處K0離合器扭矩與E4處發動機扭矩之間的扭矩值以使得轉速不至于回落過快。G階段的控制時間需要同時考慮到發動機斷油控制所需的最短時間te,min以及發動機扭矩響應能力,其表達式如下:
(13)
(2)H階段:電機快速降扭。在此過程中,電機扭矩快速下降至電機過零控制前的M5處扭矩,具體數值視過零控制扭矩需求來標定,一般情況下標定為2 N·m。H階段控制的最短時間由電機扭矩響應能力決定,其表達式如下:
(14)
(3)I階段:電機扭矩過零控制。電機扭矩過零控制過程即為電機正負扭矩切換過渡過程,該過程需要考慮傳動齒輪間隙和響應沖擊等具體參數來進行標定優化,M6處扭矩為過零控制結束時的負扭矩,一般情況下標定為-7 N·m。I階段的最短控制時間可由下式求得:
(15)
(4)J階段:電機調速。M7處扭矩的作用是快速將發動機與電機的轉速拖拽下來,它與M6處扭矩的變化差值可取S7轉速值下降到S8轉速值所需負扭矩的1倍。在該控制過程中,M7、M8處電機扭矩可分別按下式進行估算:
(16)
(17)
式中,Δt為扭矩變化控制動態響應的時間差。
J階段的最短控制時間可由下式得到:
(18)
(5)K階段:發動機恢復噴油。在此過程中,發動機開始恢復噴油并使扭矩恢復到怠速轉速所需的扭矩,該扭矩也可為下一階段的扭矩耦合做準備。將S8處轉速標定為在達到空怠速穩定轉速前的提速起始轉速,該值可標定為與S9處轉速存在100 r/min左右的轉速差以便扭矩能夠完全耦合。E7處發動機扭矩為E2處扭矩減去用于扭矩耦合提升的偏移量。K4處K0離合器扭矩為E7處發動機扭矩與離合器傳遞拖拽扭矩值之和。M9處電機扭矩為E7處發動機扭矩與考慮S8處轉速波動所需的附加負扭矩之間的偏差扭矩,其表達式如下:
(19)

2.5 扭矩耦合控制
在起步工況及行車工況發動機啟動控制過程中,由于此時電機和發動機的扭矩均為正值且車輛處于移動過程,因此可以進行直接的扭矩耦合疊加且不會造成動力鏈的振蕩。而在靜置工況發動機啟動過程中,與發動機扭矩耦合的電機扭矩為負扭矩,兩者在耦合至怠速充電時會產生因效率估算不準而造成扭矩鏈的振蕩,因此先需將扭矩耦合至非充電狀態,這樣可以較好地完成扭矩耦合而不至于出現轉速大幅波動的情形。
M10處電機扭矩與M6處電機扭矩相同,這樣設計的好處是可以有效避免再次進行過零控制。E8處發動機的耦合扭矩和此階段的控制時間分別由下式求得:
(20)
(21)

2.6 耦合至怠速充電控制
當發動機啟動完成并與電機形成扭矩有效耦合后,在絕大多數怠速工況下都是發動機在給電池充電,因此相較于其他兩種工況,靜置工況發動機啟動完成后會存在一個耦合至怠速充電控制的階段,且這一階段必須和發動機啟動過程放在一起進行控制討論。下面給出了此階段相應的控制目標要求。
M11處扭矩為穩定怠速充電時的電機扭矩,該扭矩是在考慮充電功率、充電轉速以及充電效率等相應控制的綜合計算中得出來的目標值。對應此階段的發動機扭矩(即E9處發動機扭矩)及最短控制時間可分別由下式求得:
(22)
(23)
3 仿真分析
本文以靜置工況發動機啟動為例來進行基于控制設計的仿真分析。根據上述設計的控制策略及其控制計算公式,設置表1中仿真基礎定義參數作為模型控制仿真計算的輸入并進行仿真分析。
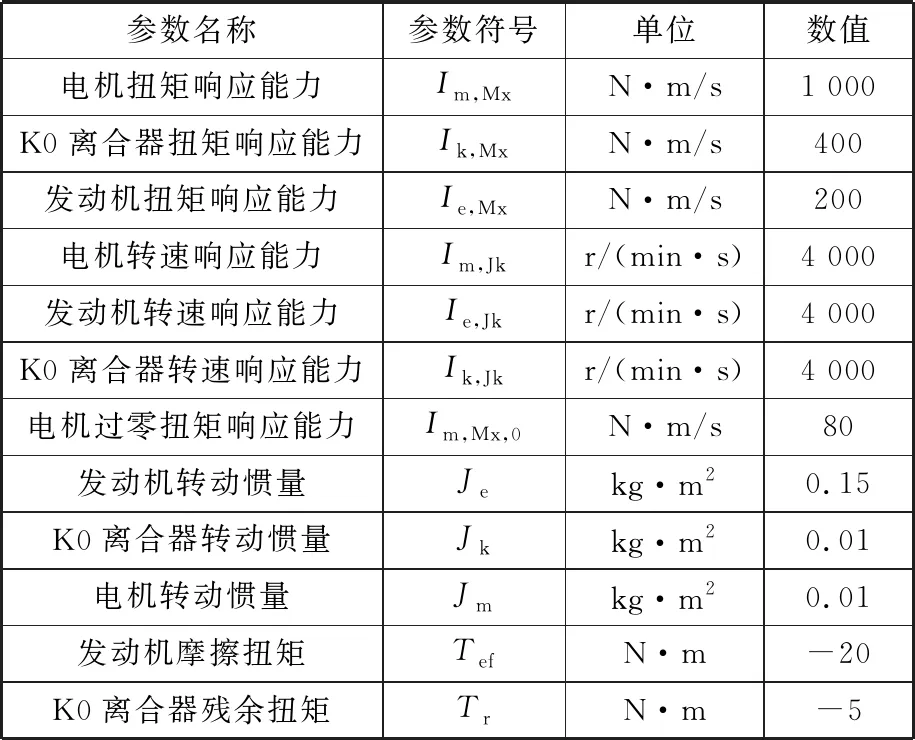
表1 仿真參數
考慮到簡化仿真過程的需要,定義發動機摩擦扭矩Tef和K0離合器殘余扭矩Tr為常值。根據上述控制計算公式可以計算出相應的扭矩和轉速,然后根據這些計算值估算出整個控制過程細分階段的控制時間值并與仿真結果進行對比,具體計算結果如表2所示。
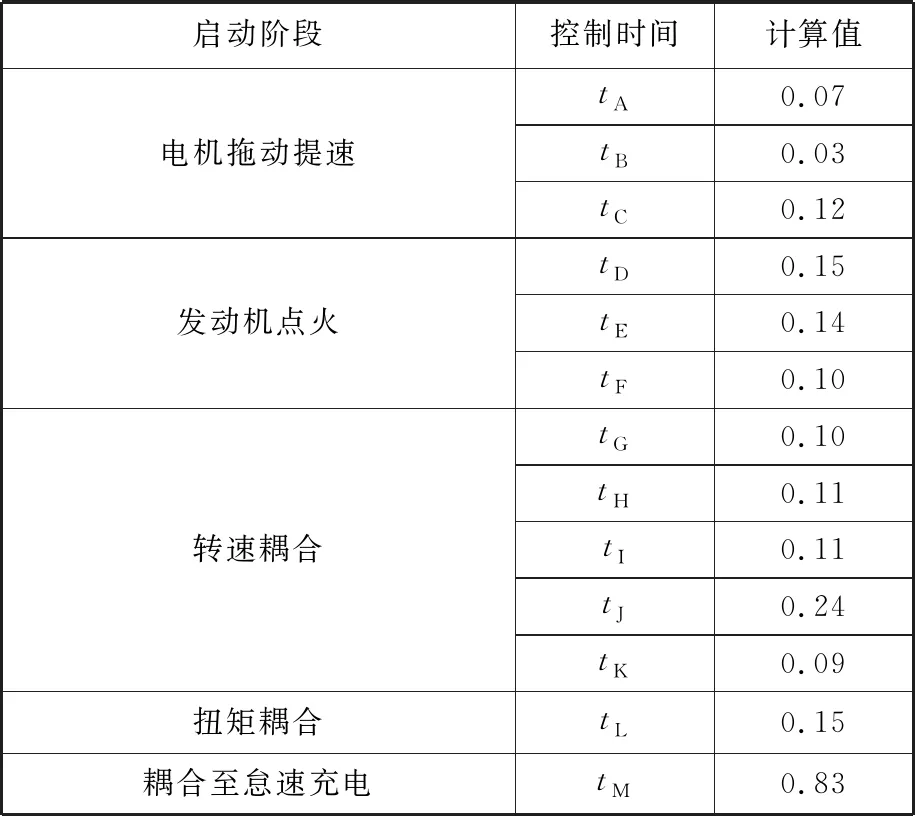
表2 控制時間計算結果
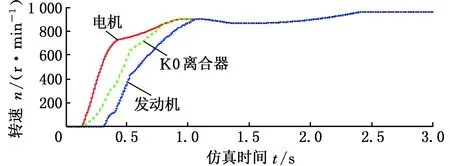
(a)轉速
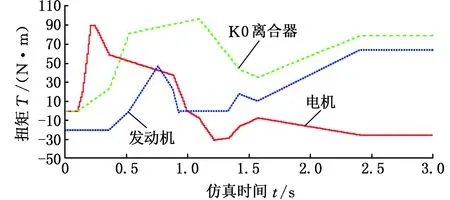
(b)扭矩
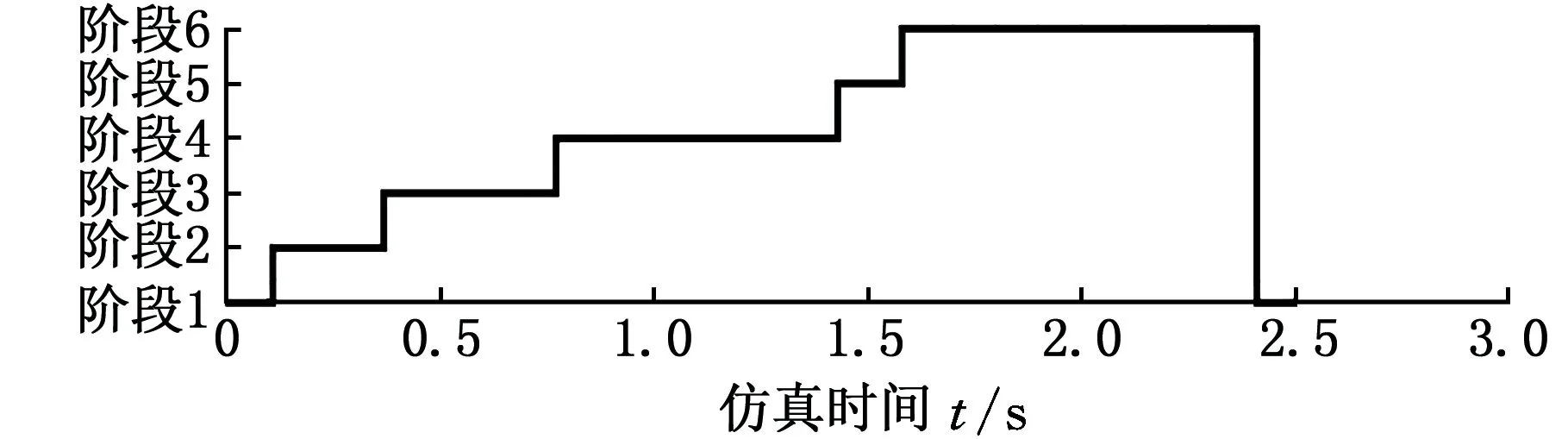
(c)啟動控制階段圖5 靜置工況發動機啟動仿真結果Fig.5 Engine start simulation in stand operation
通過上述的參數值可以仿真出發動機啟動過程中電機、K0離合器以及發動機的轉速、扭矩的過程數據,如圖5所示。其中,階段1~階段6依次為啟動完成控制、電機拖動提速控制、發動機點火控制、轉速耦合控制、扭矩耦合控制、耦合至怠速充電控制。由圖5可知,通過仿真得到的控制時間與估算出的控制時間近似相等,這證明了該啟動控制設計的動力計算方法能夠很好地實現發動機的啟動控制。
4 實車驗證
將上述啟動控制設計策略應用到某P2項目車輛的實際控制過程中。車輛通過聯合測試和標定,分別采集3種不同工況下發動機啟動過程的CAN信號數據,具體測試參數見表3,其中雙離合狀態包括:關閉(close)、滑動(slip)、靜置(stand)。

表3 測試參數
該啟動過程在變速箱控制單元(transmission control unit,TCU)控制雙離合器的配合下,全程由整車功能控制主動向發動機管理系統(engine management system,EMS)、電機控制單元(motor control unit,MCU)發出控制目標需求,該控制策略可較為精確地實現發動機的啟動控制。
圖6~圖8所示為不同工況下的發動機啟動實測數據,圖中豎線①、②處的具體數值參見右邊表格中Cursor1和Cursor2列所對應的數值,圖中數字1、2、…、12對應右邊表格中相應行的參數信號曲線,圖中左側坐標軸代表不同信號類的坐標值范圍(如轉速、扭矩等)。由圖6~圖8中3種工況的發動機啟動實測數據可知,該控制策略成功地實現了發動機動力源的有效切入。此外,由實測車輛縱向加速度和曲線波形可知,該控制策略可保證車輛很好的平順性。
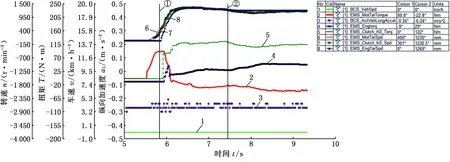
圖6 靜置工況發動機啟動實測數據Fig.6 Engine start test data in stand operation
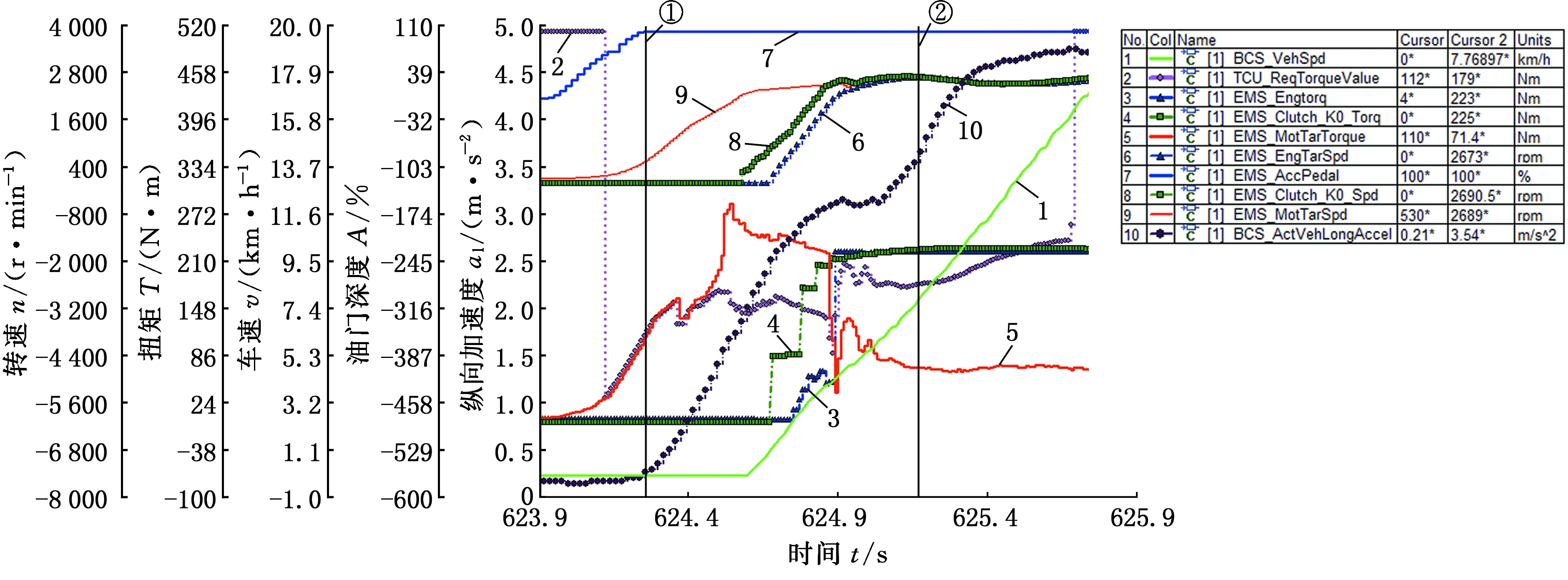
圖7 起步工況發動機啟動實測數據Fig.7 Engine start test data in pick up operation
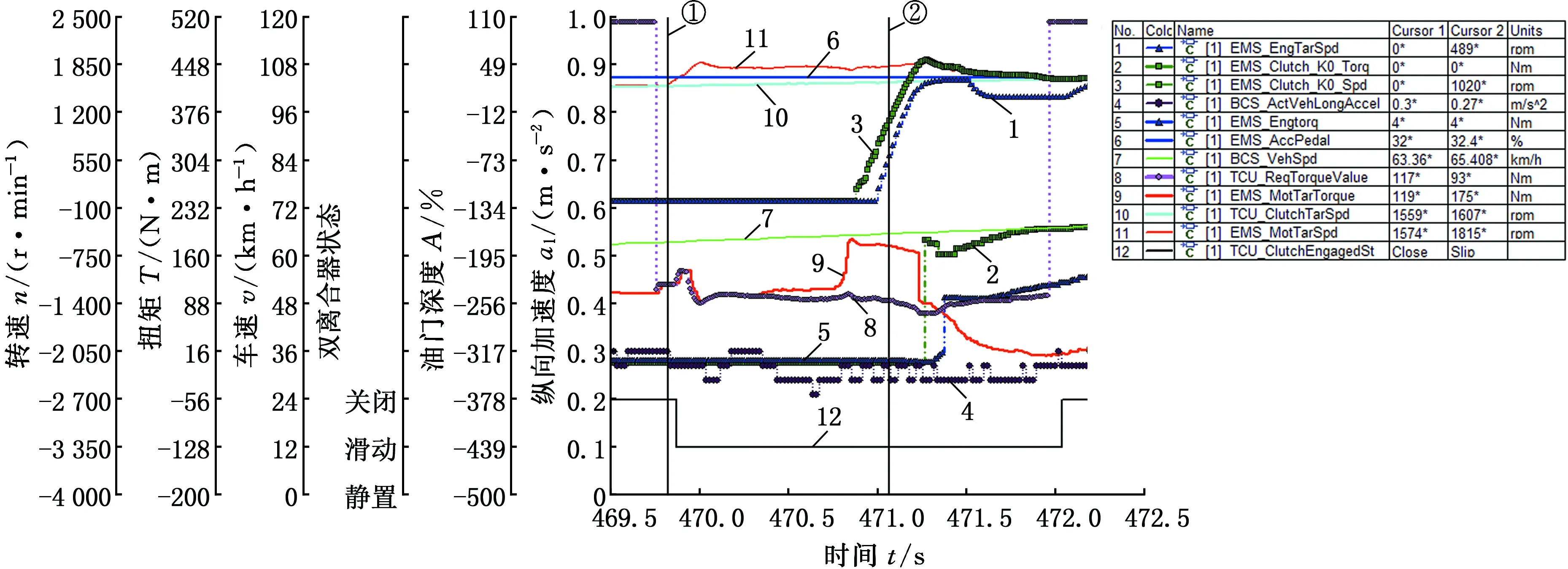
圖8 行車工況發動機啟動實測數據Fig.8 Engine start test data in driving operation
5 結語
本文從P2混合動力結構的剛性車輛動力模型出發,結合發動機實際啟動的需求設計了啟動過程控制策略,給出了相應過程控制動力計算公式并進行了仿真分析。然后結合實際項目的開發情況,將P2混合動力發動機啟動策略應用到具體的整車項目上,通過對啟動過程控制理論的探討、控制計算、實例仿真以及實車測試可知,該控制策略有效地實現了發動機在各工況下的啟動功能,同時由實車測試車輛縱向加速度曲線的變化可知,所提控制策略保證了車輛非常優異的平順性性能。目前該控制策略已成功應用于新車輛且已得到了良好的評價。
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
汽車維修與保養(2020年11期)2020-06-09 05:42:06
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
汽車維護與修理(2016年3期)2016-02-28 13:16:54
汽車維修與保養(2015年1期)2015-04-17 03:25:30
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年6期)2014-02-27 12:10:49
汽車與新動力(2014年5期)2014-02-27 12:10:41
汽車與新動力(2014年2期)2014-02-27 12:10:15
