基于BP神經網絡的電纜溝監控模式識別方法
2021-01-20 06:42:52趙曉暉宋耀華陳子涵胡雨晗時亨通邱方馳皮昊書
光學儀器 2020年6期
趙曉暉,宋耀華,陳子涵,胡雨晗,時亨通,邱方馳,皮昊書,彭 毅,吳 中,宋 杰
(1.深圳供電局有限公司,廣東 深圳 518000;2.廣東復安科技發展有限公司,廣東 東莞 523000;3.復旦大學 材料科學系,上海 200433)
引 言
電纜溝是市政地下設施的重要組成部分,常面臨偷盜和野蠻施工的破壞行為。對這些設施進行全天候監控,可極大提高城市設施的安全性,減少盲目施工造成的經濟損失和社會影響,避免人身傷害。因而需要引入一種智能的電纜溝線路監控技術,在電纜溝面臨威脅時可以快速預警定位,而且針對不同的威脅行為能有效區分,為巡查維護工作提供參考[1-4]。電纜溝安全監控系統是基于分布式光纖傳感技術,并利用光纖實時采集周遭環境信號。通過對采集到的信號進行分析與模式識別,可以及時發現電纜溝中潛在的問題,判斷入侵行為危險性的大小,實現有效預警、迅速采取措施,減少電纜溝破壞帶來的安全隱患和經濟損失。
模式識別是根據樣本的特征用計算的方法將樣本劃分為不同的類別。目前在光纖傳感領域應用的模式識別方法種類較多:從數據預處理與特征提取的角度來分,應用到的技術有濾波[5]、小波分析[6]、經驗模態分解[7]、MFCC[8]等;從分類器的角度來分,主要有神經網絡[9]、支持向量機[10]、隨機森林算法[11]等。雖然很多報道中的模式識別方法都可以達到不錯的識別率,但是很多方法存在著數據處理、運算步驟過于復雜的問題,另外一些模式識別方法與實際的報警系統結合并不緊密。針對以上問題,本文提出了一種簡單有效的光纖傳感信號模式識別方法,即基于BP神經網絡的電纜溝監控模式識別方法。
1 基本原理
1.1 分布式光纖傳感技術
光纖傳感是近年來迅速發展的新型傳感技術,它利用光纖中光的相位、強度、偏振等會受外界條件影響的特性,對外界的振動、溫度、應力、位移等參數進行測量。由于其獨特的傳感機理,分布式光纖傳感器可以實現對沿傳感光纖連續分布空間內的應力、溫度、振動等信息的監測,用這種方法可以替代成千上萬個單點式傳感器[12-13]。
外界振動通過“光彈效應”對光波的相位進行調制,光相位的變化可以通過構建Sagnac、M-Z、Michelson等結構的干涉光路進行檢測。干涉信號的解調往往使用3*3耦合器法[14],干涉光通過3*3耦合器進入兩個光電探測器,隨后光電探測器將光信號轉化為電信號,并且在硬件上進行去直流處理。由兩個光電探測器探測得到的電信號具有如下形式:
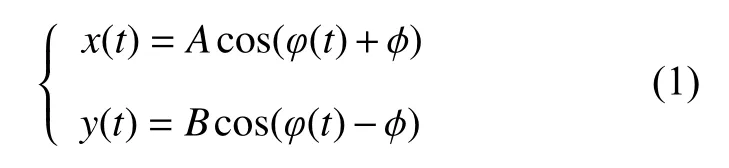
式中:A、B為振幅;為外接振動對相位的調制;為3*3耦合器引入的固定相位,為[15-16]。通過特定的相位還原算法以及定位算法可以實現擾動信號的實時解調與定位[17]。
1.2 樣本的生成與預處理
樣本預處理的流程為:首先,得到1 s內的相位還原信號的時域波形圖,對其進行特定的圖像生成程序轉化,生成一張分辨率為320*160的三通道彩色圖像,圖像的深色部分為信號,淺色部分為空白背景,如圖1所示;然后,將該原始圖像裁減至310*70大小并轉化為單通道黑白圖像,目的是去除過多的無用空白區域,減少冗余數據。通過重新調整圖像矩陣維度將新生成的310*70灰度圖像轉化為維度為(1, 21 700)的向量,該向量經過歸一化(使向量的模為1)后生成最終的樣本,該樣本就是輸入BP(back propagation)神經網絡的樣本,其維度對應了BP神經網絡輸入層的神經元數量。整個樣本預處理的流程如圖2所示。
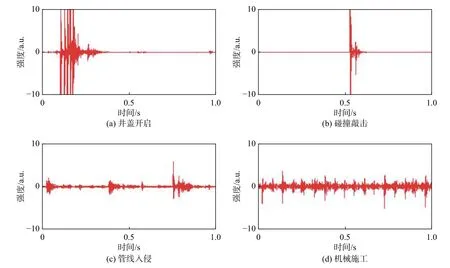
圖1 4 種擾動模式對應信號Fig. 1 Corresponding signals of the four disturbance modes
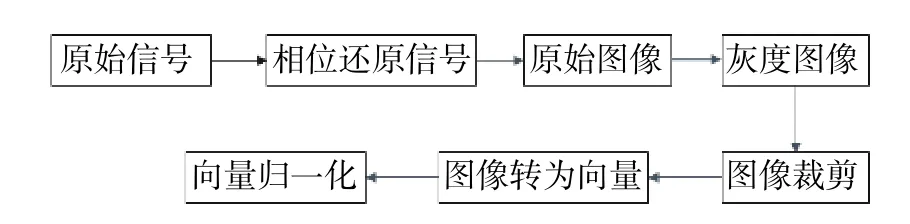
圖2 樣本的生成與預處理流程圖Fig. 2 Flow chart of sample generation and preprocessing
1.3 構建 BP 神經網絡
BP神經網絡[18]是一種按照誤差逆向傳播算法訓練的多層前饋神經網絡,是目前應用最廣泛的神經網絡,可以用于模式識別、數據擬合等場景。使用最基本的全連接型BP神經網絡可以完成上述樣本的分類,BP神經網絡結構由輸入層、多層隱含層(中間層)、輸出層構成,如圖3所示。
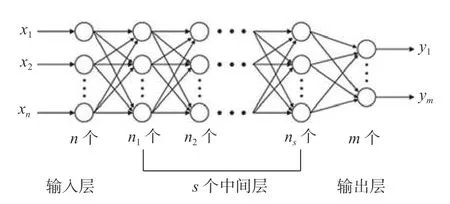
圖3 BP 神經網絡的拓撲結構Fig. 3 Topological structure of BP neural network
在本研究中選取的結構為兩層隱含層的BP神經網絡,從輸入層至輸出層的神經元數量依次為21 700、100、50、4,其中21 700對應了樣本的維度。最終樣本被分為4類,對應了輸出層的4個神經元y1、y2、y3、y4,當y1為其中的最大值時,對應井蓋開啟的模式,y2、y3、y4分別對應了碰撞敲擊、管線入侵、機械施工。
神經網絡的訓練通過Google的Tensorflow框架[19]實現(使用Python語言編寫),使用softmax函數作為輸出層激活函數,交叉熵函數作為損失函數,使用梯度下降法[20-21]進行優化。損失函數的表達式如下:
1.4 模型在實時報警系統中的應用
實驗所用的電纜溝線路安全監控系統主要包括傳感光路、數據采集模塊與監控軟件。光感光路中包含光源、光模塊、傳感光纖等,當傳感光纖受到擾動時,包含擾動信息的光信號經過數據采集卡轉換為電信號,然后監控軟件讀取該電信號并進行相應的數據處理與模式識別。當線路中出現異常情況時,系統會發出報警信息,軟件界面如圖4所示。該軟件是基于LabVIEW編寫的其中的模式識別功能是通過主程序調用子vi文件實現的。因此將訓練好的神經網絡模型編寫為子vi,即可將模式識別功能嵌入到電纜溝線路安全監控系統中,以實現實時的模式識別與報警。

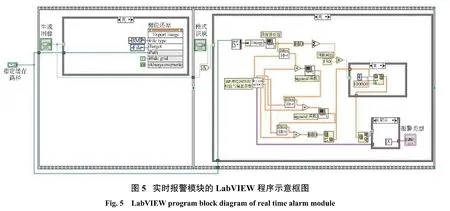
具體的實現方法:首先將訓練好的神經網絡的權值與偏置參數從Python中導出,保存為vi文件,命名為para.vi;然后在LabVIEW中重建數據預處理程序與神經網絡的結構,保存為vi文件,命名為pattern.vi,該vi程序可以對輸入的信號進行模式識別,其程序框圖如圖5所示。在該程序中設定報警的閾值,可以實現無擾動或輕微擾動時不報警,只有擾動信號大到一定程度后才進行識別。電纜溝線路安全監控系統的主程序對兩路光信號進行實時采集、實時相位還原,每采集一秒鐘的信號就會生成一張圖片,這張圖片會傳遞至pattern.vi中,pattern.vi對圖片進行模式識別,并將報警信息傳遞到監控軟件的界面上,即可完成實時報警。
2 實驗結果與分析
本文訓練集與測試集采用均分的方式,每種樣本選取25個作為訓練集,25個作為測試集,共200個樣本參與到BP神經網絡的訓練過程中。經過將近1 000次的梯度下降運算,最終訓練集準確率為100%,測試集準確率為99%,訓練集與測試集的損失函數分別為3.177、7.532,梯度下降的過程如圖6所示。最終測試集的準確率達到了較高的水平,并且損失函數下降到了比較低的水平,說明該模型能夠較好地實現對4種數據的分類。
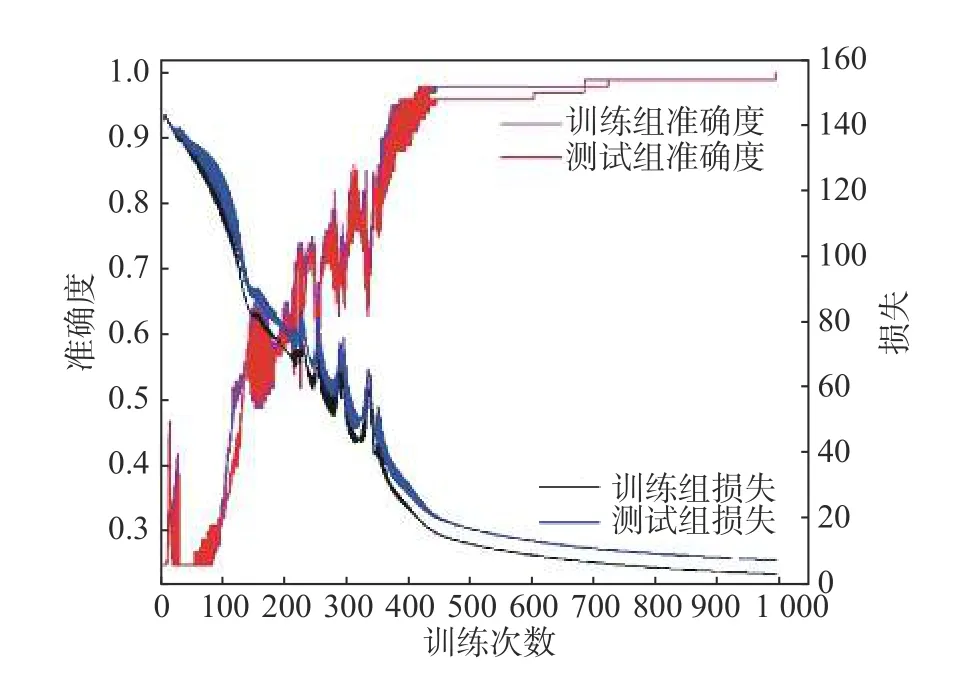
圖6 BP 神經網絡的訓練過程Fig. 6 Training process of BP neural network
為了進一步驗證該模型的有效性,將該模型嵌入到實時報警系統中進行識別。實驗共采集了272個樣本,其中井蓋開啟信號68個,碰撞敲擊信號52個,管線入侵信號64個,機械施工信號88個。如表1所示,所有樣本中最終只有5個判斷錯誤,總體識別成功率為98.16%。判斷錯誤的樣本中主要是將井蓋開啟信號誤識別為碰撞敲擊信號,經過分析得出這可能是采樣不完整導致的。通過端點檢測[22]等技術重新調整采樣開始的時間,避免同一個井蓋開啟信號出現在兩幀不同的圖像中,就可以有效解決該問題。
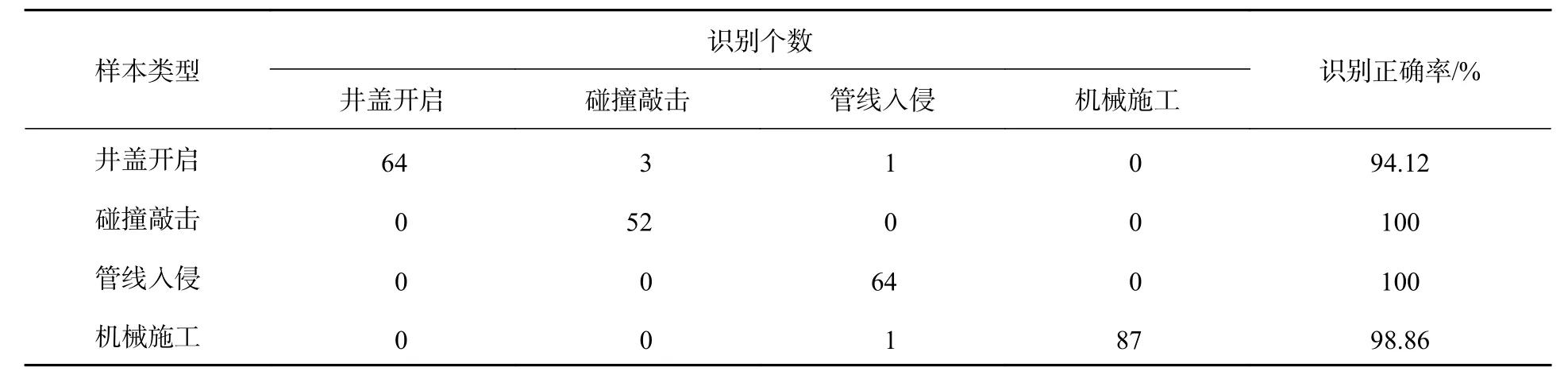
表1 四種樣本的識別結果及正確率Tab. 1 Recognition results and accuracy of the four kinds of samples
在識別時間方面,該方法單個樣本識別時間僅在0.023 s左右,加上信號采集的時間以及重新調整采樣時間,單個樣本的報警時間可以控制在2 s內,符合行業標準GA/T 1217—2015中光纖振動報警器的報警時間要在3 s以內的要求[23]。
該方法的本質是利用了光纜振動信號的時域特征進行模式識別。在該實時報警系統中,采樣率是1 s內包含500 000個采樣點,而該方法實際上相當于對原始相位還原信號進行了降采樣,最終輸入神經網絡時只用到21 700個點,同時保留了信號的特征。用于訓練的樣本就是通過信號生成的圖像,所以該方法具有簡單、直觀的特點。但該方法也忽略了振動信號的頻域信息,導致多種振動模式疊加時容易出現誤報的問題。在實際應用中,采用圖像方法結合頻域特征進行識別會使識別更加準確。
3 結 論
本文基于分布式光纖傳感技術并結合圖像分析與BP神經網絡,提出一種有效的電纜溝安全監控模式識別方案。通過圖像生成程序將每一秒的相位還原信號轉化為圖像,圖像經過簡單的處理后輸入到BP神經網絡中進行訓練與識別,將訓練好的神經網絡模型嵌入到基于LabVIEW的實時報警系統中,即可實現四種模式的實時報警。該方法本質上是利用了光信號的時域信息進行識別,通過一些常用的算法就實現了較高的識別率,具有實現方法簡單、識別速度快等優點,能對井蓋開啟、碰撞敲擊、管線入侵、機械施工這幾種行為進行有效識別,實驗測試的總體識別成功率為98.16%。該識別方案還可應用到周界安防、光纖油管狀態監測等領域。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
電子測試(2017年23期)2017-04-04 05:06:50
智能系統學報(2017年5期)2017-01-22 11:21:30
意林原創版(2016年10期)2016-11-25 10:28:30
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56