基于烴類石油熒光效應原理的溢油檢測設計
2021-01-20 13:43:58陳翀
石油化工應用 2020年12期
陳 翀
(中海油信息科技有限公司湛江分公司,廣東湛江 524000)
海洋面積約為3.6×108km2,其約占地球表面積的71 %。近幾十年來,工業發展取得了輝煌的成就,而海洋的污染問題日益加重,水體水質遭到破壞,這不僅不利于海里生物的生存生長,而且影響人類的身體健康。海上溢油是全球海洋的主要污染之一,石油污染會在海面形成很大一層油膜,使得海內的浮游生物,魚蝦和貝類等生物缺氧甚至大量死亡,其死亡后產生的毒素可以通過食物鏈毒害人體,導致經濟的嚴重損失和人體健康的損害[1,2]。為保證及時發現溢油情形并且準確處理溢油事故,就需要對采油附近海面進行溢油檢測,及時做出預警,以減少溢油事故造成的海洋破壞。劉丙新[3]提出了一種基于光譜特征的決策樹溢油和MNF 的決策樹溢油的信息提取方法,他認為可以根據水體、表面油膜的光譜特征,再利用遙感影像進行溢油檢測。該方法適用于出現溢油后,再進行處理,無法在溢油事故初期做出預警。聞心怡等[4]研制出一種能夠掛在AUV上的溢油檢測系統,該系統可以實現與AUV 無縫連接,可以對海底輸油管道進行泄漏檢測。Rudolf Ressel等[5]提出了一種采用相干雙極化的技術進行溢油檢測處理,首次將傳統和極化特征相結合應用于溢油檢測中。黃徽[6]提出了基于三維熒光光譜的溢油檢測方法,他根據交替三線性分解,平行因子分析和自加權交替三線性分解三種方法提出了一種應用組合算法(ACM),通過該算法對油污進行分辨與檢測。
上述幾種檢測溢油的方法雖然在現場環境使用中取得了較為準確的檢測效果,但是有些檢測方法操作起來比較復雜,有些計算量比較大,在某種程度上可能延長發現溢油事故的時間,從而無法及時處理。針對該類問題,本文提出一種基于烴類石油熒光效應原理的溢油檢測方法,用熒光峰值的熒光法對水面溢油進行檢測,采用長焦鏡頭實現較遠距離目標圖像非接觸捕捉,采用基于局部極值的分水嶺算法進行目標提取與圖像識別,從而建立一個完整的溢油檢測系統。該方法流程簡單,計算簡單準確,能夠及時處理海洋溢油事故。
1 熒光檢測原理
1.1 熒光的產生
當光照射到某一物質上時,光的能量能夠使該物質周圍的一些電子從原來的軌道躍遷到更高能的軌道,即由基態躍遷到第一個激發或者第二個激發的單線態等。該單線這種激發態是不穩定的,持續數秒后,它們還會恢復到基態,當電子從第一激發單線態回到基態時,能量將以光或者熱的形式釋放出來,進而產生熒光[7]。
1.2 熒光檢測方法
石油是由碳氫化合生成的烴類物質,而烴類物質具有很高的熒光效率,因此熒光檢測方法對于海洋溢油檢測具有重要意義。利用石油中烴類物質的熒光特性進行溢油檢測,具有靈敏度高和穩定性強、非接觸性檢測等優點。當激光(波長小于290 nm)激發到含有礦物質油的油水混合物中時,它的熒光峰值波長大約在350 nm~400 nm,254 nm 為其最有效的激發波長[8]。由于激光的能量集中,其純度高而且反射光容易被濾除,為最理想且適用于溢油檢測的照射光源,因此采用半導體激光器搭建激光發射光路,解決激發光源問題。
2 圖像提取與目標識別
圖像提取與目標識別是將傳入的信息與系統中儲存的信息作比較,進而對圖像進行識別。系統需要將傳入的信息做圖像預處理、圖像分割與特征提取。圖像濾波是在保證圖像特征的情形下對目標圖像進行降噪,為圖像后期處理和分析的可靠性提供重要保證。采用輪廓檢測和斑點檢測算法[9]對圖像進行識別,基于局部極值的分水嶺算法實現斑點檢測。為去除目標圖像中的噪聲點,首先用一個高斯低通濾波對目標圖像進行卷積處理,模型如下所示:
目標圖像f(x,y)用高斯核(方差為σ)進行高斯濾波,對目標圖像進行降噪。

目標圖像的拉普拉斯圖像為:
進而有:

該算法中,目標圖像中的二值化斑點,在σ=r/2時,高斯拉普拉斯的響應會達到最大值;當目標圖像中的圓形斑點呈黑白反向時,在σ=r/2 時,高斯拉普拉斯的響應會達到最小值。達到峰值的σ 值即為特征尺度。
在空間和尺度上均達到峰值的點為期望得到的斑點。當檢測二位圖像時,計算該目標圖像在各個尺度的拉普拉斯響應值,同時查看空間中的各個點,當該點的拉普拉斯響應值均大于或者小于除此之外的立方空間領域(27 個)的值即為被檢測目標圖像的斑點。
3 溢油檢測系統設計
溢油檢測系統的設計主要包括五大部分(時間精確校準、有序采樣、信息傳輸、聲光報警和手動復位)。首先,溢油檢測系統要設計時間校準模塊,保證該系統時間的準確性,以免在出現溢油事故時收到錯誤通知,系統要求每天對程序時間進行一次校準,確保與GPS時間一致,該模塊每天自動執行,能有效的避免因錯誤指令導致工作人員工作混亂,提前或延后收到溢油警報。其次,設計采樣模塊,設置程序保證相機每間隔一定時間進行一次海面圖片采樣工作,其中相機采樣間隔為1 s~60 s 可調,默認10 s,時間間隔可根據實際工作條件調整,易溢油區域設置間隔可在10 s 以內,不易溢油區域可調整到15 s 以上,該模塊可提高相機的使用價值。然后,設計系統自動將相機采樣的圖片傳送到PC 端,完成目標提取,采用特定的圖像算法濾除環境光和風浪引起的浪花干擾問題,進行圖像識別。進而,設計聲光報警模塊,當識別圖像中有溢油情形發生,立即啟動聲光報警信號燈,并且鎖定報警位置,通知工作人員立即處理。最后,當溢油事故處理完成后,手動復位,保證系統正常運行。該系統適用于油膜檢測厚度為20 μm 以上。溢油檢測的工作流程(見圖1)。
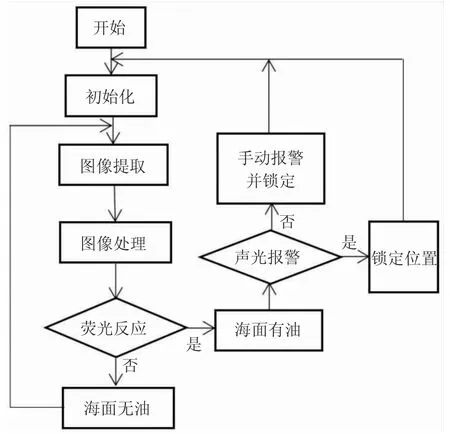
圖1 溢油檢測流程圖
本文采用Vs2015 c#軟件對系統進行編程。該程序可實現上述所示功能,本系統將用于海洋石油平臺上。
4 溢油檢測測試
構建實驗環境,陽光充足的某天,風速3~4 級,選擇一處沒有任何遮擋的室外空間,在地面上放置四個大型水槽模擬海面,其中三個水面有油稱為B、C、D,一個水面無油稱為E,將檢測設備吊裝在水槽上方,檢測設備與水面距離可以調整,本實驗將檢測設備吊裝在距離水槽水面3 m 的位置。實驗分別選在清晨(A1)、上午(A2)、中午(A3)、下午(A4)、傍晚(A5)和晚上(A6)具有不同光線照射情況的六個時間段進行采樣。檢測結果按照三種情況進行記錄,檢測成功為X,檢測失敗為Y,不確定為Z。檢測標準為激光照射浮油產生的圓形光斑亮度遠遠大于周圍水面亮度,也大于激光照射普通水面產生的光斑亮度可判斷為有溢油否則無。測得的溢油實驗情況(見表1)。檢測結果為不確定事件的原因是相機鏡頭有污漬。

表1 溢油檢測實驗情況分布表
由表1 實驗結果可以看出,針對不同光線照射的六個時間段,檢測出的溢油情況除相機鏡頭有污漬均為準確事件,即工作中,應注意時刻保持鏡頭無污染。實驗表明溢油檢測系統具有很高的準確性和實用性,可以應用到海洋溢油檢測中。
5 結論
該溢油檢測裝置,采用半導體激光器搭建激光發射光路;高速工業相機,配合長焦鏡頭實現較遠距離目標圖像;采用基于局部極值的分水嶺算法進行目標提取與圖像識別,濾除干擾等問題,開發相應操作程序完成溢油檢測并實時報警。實驗驗證了該溢油檢測方法的可行性與實用性。在海洋采油工作平臺上使用該溢油檢測方法能夠及時且準確的處理海面溢油事故,為確保生態環境以及人類健康做出重要保障。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34