基于HTCPN的牽引車動(dòng)態(tài)優(yōu)化調(diào)度
2021-01-20 08:32:34蘇志剛趙松澤郝敬堂
計(jì)算機(jī)工程與設(shè)計(jì) 2021年1期
關(guān)鍵詞:模型
蘇志剛,趙松澤,郝敬堂
(中國民航大學(xué) 中歐航空工程師學(xué)院,天津 300300)
0 引 言
快速增長的航空運(yùn)輸量極大增加了機(jī)場場面的運(yùn)行壓力[1]。目前我國大部分機(jī)場的工作人員是通過目視、語音對(duì)講等方式對(duì)符合條件的車輛進(jìn)行調(diào)度[2],落后的信息獲取方式及決策過程導(dǎo)致航班高峰時(shí)段調(diào)度效率低下,進(jìn)而影響航班的準(zhǔn)點(diǎn)率。地勤保障車輛調(diào)度問題持續(xù)受到國內(nèi)外學(xué)者的廣泛關(guān)注,研究方法主要集中在運(yùn)籌學(xué)方法[3-7]和系統(tǒng)仿真方法[8-12]兩個(gè)方面。
運(yùn)籌學(xué)方法是將車輛調(diào)度問題簡化為多目標(biāo)優(yōu)化模型,再利用啟發(fā)式算法進(jìn)行求解。啟發(fā)式算法主要是對(duì)靜態(tài)調(diào)度問題進(jìn)行優(yōu)化。即假設(shè)在航班計(jì)劃、航班需求時(shí)間窗以及作業(yè)時(shí)間等信息已知并始終不變的前提下,根據(jù)航班的需求規(guī)劃車輛的行駛路徑。實(shí)際情況下影響航班運(yùn)行的隨機(jī)因素較多。當(dāng)隨機(jī)因素對(duì)原有航班計(jì)劃產(chǎn)生影響時(shí),車輛資源需要重新分配。雖然啟發(fā)式算法可以得到可行解,但其不能很好地對(duì)調(diào)度過程中的隨機(jī)因素實(shí)時(shí)響應(yīng)。
系統(tǒng)仿真方法利用離散仿真模型模擬調(diào)度流程,十分適用于機(jī)場車輛調(diào)度這種存在諸多不確定因素的離散動(dòng)態(tài)隨機(jī)過程的分析。采用仿真方法可以很好地模擬調(diào)度過程中的突發(fā)事件,設(shè)計(jì)出針對(duì)不同隨機(jī)問題的解決方案。芝加哥機(jī)場和日本民航局采用TAAM[11](total airspace & airport modeler)對(duì)空域和飛行區(qū)進(jìn)行仿真研究,分析機(jī)場的運(yùn)行方式和空域構(gòu)型。丹佛機(jī)場利用SIMMOD[12]分析現(xiàn)有飛行區(qū)的運(yùn)行狀況以及新的改造措施對(duì)延誤的影響。上述仿真軟件雖然功能強(qiáng)大,但價(jià)格昂貴,且仿真的主要對(duì)象是航空器,僅有少部分功能涉及到車輛調(diào)度過程。
本文運(yùn)用層次賦時(shí)著色Petri網(wǎng)(hierarchical timed colored Petri net,HTCPN)對(duì)牽引車調(diào)度過程進(jìn)行仿真。利用層次Petri網(wǎng)(hierarchical Petri net,HPN)對(duì)系統(tǒng)進(jìn)行模塊劃分,增加模型的可視性;利用著色Petri網(wǎng)(colored Petri net,CPN)對(duì)不同資源進(jìn)行標(biāo)記區(qū)分;利用賦時(shí)Petri網(wǎng)(timed Petri net,TPN)模擬牽引車資源占用和釋放的實(shí)時(shí)情況。搭建動(dòng)態(tài)調(diào)度仿真系統(tǒng),根據(jù)航空器發(fā)送的推出申請完成航空器與牽引車的動(dòng)態(tài)匹配。提出調(diào)度優(yōu)化方案,實(shí)現(xiàn)不同車輛間工作負(fù)荷均衡度最高和車輛行駛總距離最短的優(yōu)化目標(biāo),通過仿真實(shí)驗(yàn)驗(yàn)證了優(yōu)化的有效性。最后完成對(duì)目標(biāo)機(jī)場牽引車保障能力的評(píng)估,預(yù)測在不同航班密度下的牽引車配置數(shù)量。
1 牽引車調(diào)度數(shù)學(xué)模型
1.1 調(diào)度流程分析
針對(duì)牽引車調(diào)度特點(diǎn),將調(diào)度流程簡化為如下步驟:首先按照假設(shè)的規(guī)則隨機(jī)生成離港航班信息,系統(tǒng)根據(jù)每架航空器的預(yù)計(jì)離港時(shí)刻非降序排列所有航班信息形成航空器等待隊(duì)列,每架航空器在其預(yù)計(jì)離港時(shí)刻前TRequest分鐘發(fā)出推出申請;系統(tǒng)按照設(shè)定的動(dòng)態(tài)優(yōu)化調(diào)度目標(biāo)逐一為待服務(wù)航空器分配滿足條件的牽引車前往服務(wù);牽引車在開始推出任務(wù)前判斷與鄰近機(jī)位是否存在推出沖突,如存在沖突則在原地等待;待沖突解脫后牽引車將航空器推出到指定位置,并完成信息的記錄與更新。
1.2 基本假設(shè)
機(jī)場場面運(yùn)行過程中包含諸多隨機(jī)因素,在不影響牽引車和航空器正常運(yùn)行的前提下對(duì)模型做如下假設(shè):
(1)單位時(shí)間內(nèi)離港航空器數(shù)目服從參數(shù)為λ的泊松分布[13,14];
(2)正常情況下,每架航空器在其預(yù)計(jì)離港時(shí)刻前TRequest=15min發(fā)出推出申請;
(3)牽引車推出航空器時(shí)與鄰近機(jī)位發(fā)生推出沖突的概率為PConflict, 若存在推出沖突,牽引車和航空器在原地等待的時(shí)間滿足均值為TConflict的指數(shù)分布;
(4)牽引車推出航空器的作業(yè)時(shí)間服從高斯分布N(μ,σ2)。 作業(yè)時(shí)間的均值μ由被服務(wù)航空器的機(jī)型決定。標(biāo)準(zhǔn)差σ的取值與航空器機(jī)型無關(guān),與推出時(shí)地服人員和飛行員配合的熟練度有關(guān)。
1.3 優(yōu)化目標(biāo)
在現(xiàn)有運(yùn)行模式下,調(diào)度部門收到推出申請后,會(huì)按照車輛序號(hào)順序分配可用車輛。如果存在可用車輛,立刻分配該牽引車從當(dāng)前位置駛向指定機(jī)位進(jìn)行服務(wù)。若所有牽引車當(dāng)前時(shí)刻均處于工作狀態(tài),調(diào)度人員會(huì)根據(jù)反饋信息指派最先完成當(dāng)前任務(wù)的牽引車執(zhí)行該任務(wù)。現(xiàn)行調(diào)度規(guī)則存在以下問題。
(1)每輛牽引車航班任務(wù)分配不均衡;
(2)為航空器分配牽引車時(shí)沒有考慮候選車輛與服務(wù)需求點(diǎn)間的距離。
為解決當(dāng)前調(diào)度模式下存在的問題,需要依次從車輛到達(dá)時(shí)間、車輛工作負(fù)荷均衡度和車輛行駛距離3個(gè)方面進(jìn)行優(yōu)化。
車輛到達(dá)時(shí)間:在實(shí)際運(yùn)行中時(shí)間因素最為重要,要求車輛延誤到達(dá)的時(shí)間最少
(1)
式中:ti表示第i架航空器因牽引車晚點(diǎn)造成的延誤時(shí)間,式(2)是表示延誤與否的符號(hào)函數(shù)
(2)
車輛工作負(fù)荷均衡度:為保證牽引車的安全使用和駕駛?cè)藛T的合理分配,調(diào)度車輛時(shí)應(yīng)盡量提高不同車輛間工作負(fù)荷的均衡度,本文采用車輛間工作負(fù)荷差的累積和作為表征均衡度的目標(biāo)函數(shù)
C2=min∑i,j∈V|Ni-Nj|
(3)
式中:V表示牽引車的集合,Ni和Nj表示編號(hào)為i和j的牽引車服務(wù)過的航班數(shù)量。
車輛行駛距離:牽引車在不同機(jī)位間往返的距離不可忽略,減少行駛距離可進(jìn)一步保證牽引車的準(zhǔn)時(shí)到達(dá),同時(shí)降低機(jī)場或航空公司的燃油成本
C3=min∑i∈VDi
(4)
式中:Di表示編號(hào)為i的牽引車行駛過的總距離。
2 HTCPN動(dòng)態(tài)調(diào)度仿真系統(tǒng)
2.1 模型描述
建模采用自頂向下的分解原則。首先確定調(diào)度流程的整體功能模型圖,然后再對(duì)頂層模型進(jìn)一步細(xì)化,在子頁中實(shí)現(xiàn)子流程功能,形成分層模型。牽引車動(dòng)態(tài)調(diào)度仿真系統(tǒng)的層次賦時(shí)著色Petri網(wǎng)模型可簡化為以下多元組
HTCPN=(S,SN,SA,PN,PT)
(5)
HTCPN中各參數(shù)的含義分別為:
(1)S代表子頁的有限集合,每個(gè)子頁對(duì)應(yīng)于調(diào)度過程中一個(gè)關(guān)鍵的子流程,依次為航空器推出申請、航空器牽引車實(shí)時(shí)匹配、航空器推出沖突、航空器推出過程。S中的任意子頁s均是一個(gè)非層次的賦時(shí)著色Petri網(wǎng)
s=(CPN,R,r0)
(6)
式中:R是時(shí)間值的集合,稱為時(shí)間戳;r0是R中的元素,對(duì)應(yīng)于調(diào)度過程的起始時(shí)刻。
(2)SN是替代變遷,SN?T,T表示變遷集合,采用變遷代表Petri網(wǎng)結(jié)構(gòu)中的某一模塊,使得網(wǎng)絡(luò)在邏輯上得到簡化,之后在對(duì)應(yīng)的子頁再進(jìn)行更深層次的精細(xì)化建模。
(3)SA是頁分配函數(shù),SA∶SN→S, 表示子頁和替代變遷間的對(duì)應(yīng)關(guān)系。
(4)PN代表端口節(jié)點(diǎn)的集合,PN?P,P表示庫所集合。
(5)PT是端口類型函數(shù),是從PN定義到{In,Out,In/Out,General} 的函數(shù)。
式(6)中的參數(shù)CPN表示一個(gè)非層次的著色Petri網(wǎng),可用如下9元組表示
CPN=(P,T,A,Σ,V,C,G,E,I)
(7)
式中:P表示庫所集合,以橢圓形表示,可以表示動(dòng)態(tài)調(diào)度仿真系統(tǒng)各資源的實(shí)時(shí)狀態(tài);T表示變遷集合,以矩形表示,代表調(diào)度中每個(gè)具體事件的發(fā)生,實(shí)現(xiàn)不同庫所間的信息傳遞;A為有向弧集合,是聯(lián)系庫所和變遷之間的流關(guān)系;Σ為顏色集的非空有限集合;V為變量集合;C為顏色集函數(shù),定義庫所的數(shù)據(jù)類型;G為變遷上的守衛(wèi)表達(dá)式,E為有向弧表達(dá)式,守衛(wèi)表達(dá)式和弧表達(dá)式共同定義了變遷的使能條件;I為初始化函數(shù),定義庫所的初始標(biāo)記。
托肯(token)表示分配給庫所的資源,在Petri網(wǎng)模型的執(zhí)行過程中會(huì)發(fā)生個(gè)數(shù)和位置的變化。牽引車和航空器是模型中兩種不同類型的資源,分別對(duì)其著以不同的顏色進(jìn)行分類。變遷觸發(fā)后會(huì)從其輸入庫所移出托肯,同時(shí)向輸出庫所增加托肯, 從而引起模型狀態(tài)的改變。航空器與牽引車的顏色集見表1。
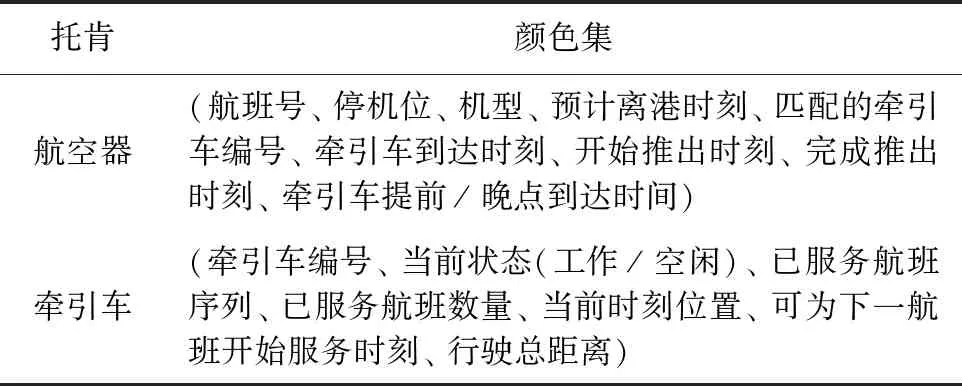
表1 航空器與牽引車顏色集
航班號(hào)、停機(jī)位、牽引車編號(hào)等初始屬性的作用是對(duì)托肯的活動(dòng)進(jìn)行約束,牽引車到達(dá)時(shí)刻、牽引車已服務(wù)航班序列、牽引車當(dāng)前位置等屬性則會(huì)隨系統(tǒng)的運(yùn)行實(shí)時(shí)更新,更新后的結(jié)果將成為后續(xù)運(yùn)行中新的約束條件。
2.2 頂層模型
動(dòng)態(tài)調(diào)度仿真系統(tǒng)的頂層模型如圖1所示。替代變遷用雙框矩形表示,各替代變遷的含義見表2。

表2 頂層模型中替代變遷及其對(duì)應(yīng)子過程
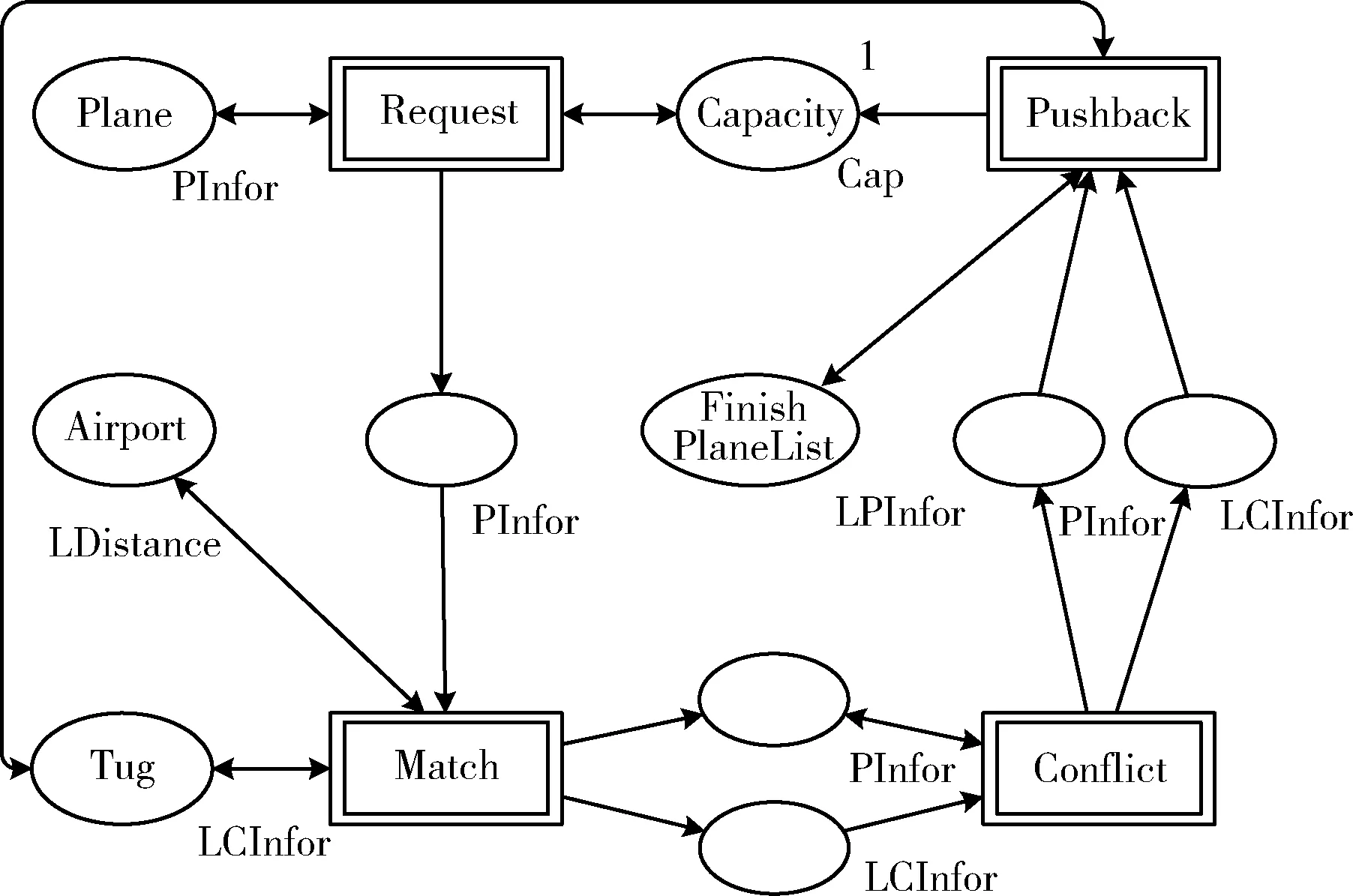
圖1 牽引車調(diào)度頂層模型
庫所右下方的標(biāo)識(shí)代表顏色集,根據(jù)容納的資源類型分為4類:航空器狀態(tài)庫所(PInfor)、航空器隊(duì)列狀態(tài)庫所(LPInfor)、牽引車集合狀態(tài)庫所(LCInfor)和約束類庫所(LDistance,Cap)。
庫所Plane存儲(chǔ)系統(tǒng)隨機(jī)生成的航班信息,庫所Tug存儲(chǔ)機(jī)場內(nèi)初始時(shí)刻所有牽引車的信息,庫所Airport對(duì)應(yīng)于機(jī)坪不同位置點(diǎn)距離的錄入,以上3個(gè)庫所是模型中初始信息的輸入窗口。所有航空器會(huì)依次通過4個(gè)替代變遷,最終回到Finish PlaneList庫所中,該庫所的作用是記錄每架航空器被推出后的最終狀態(tài)。此外,庫所Capacity對(duì)航空器等待隊(duì)列起到容量約束的作用。在庫所和替代變遷的共同作用下,調(diào)度過程的HTCPN模型形成一個(gè)閉環(huán)反饋結(jié)構(gòu)。
2.3 航空器推出申請
頂層模型中表示航空器推出申請的替代變遷(Request)展開后可得到如圖2所示的子頁模型。
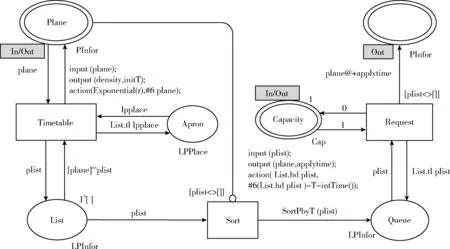
圖2 航空器推出申請模型
系統(tǒng)首先通過Timetable變遷在一定規(guī)則下隨機(jī)生成航班數(shù)據(jù)。該變遷守衛(wèi)表達(dá)式中的density用于模擬服從泊松分布的航班流。庫所Apron中存儲(chǔ)系統(tǒng)自動(dòng)生成的離港航空器所在停機(jī)位編號(hào),分配時(shí)采取隨機(jī)原則,同時(shí)確保同一機(jī)位在2小時(shí)內(nèi)不會(huì)被再次分配。生成的航班信息在List中以列表的形式存儲(chǔ)。List中的航班列表再通過Sort變遷完成按預(yù)計(jì)離港時(shí)刻的非降序排列,在Queue中形成航班的等待隊(duì)列。最后通過Request變遷逐一發(fā)出推出申請。通過Capacity庫所可以使系統(tǒng)逐一地接收航空器隊(duì)列發(fā)出的推出申請,從而實(shí)現(xiàn)對(duì)航空器等待隊(duì)列的容量約束。端點(diǎn)為空心圓的弧為抑制弧,作用是設(shè)置變遷發(fā)生的優(yōu)先權(quán)。當(dāng)庫所Plane中存在托肯時(shí),變遷Sort無法發(fā)生,通過抑制弧使排隊(duì)過程在航班信息生成后進(jìn)行,從而可以自主控制仿真實(shí)驗(yàn)中的航空器數(shù)目。Request變遷輸出弧上的applytime是航空器發(fā)出推出申請的時(shí)刻,作為每架航空器初始狀態(tài)下攜帶的時(shí)間戳。
2.4 航空器牽引車實(shí)時(shí)匹配
基于貪婪算法設(shè)計(jì)了航空器牽引車實(shí)時(shí)匹配算法。貪婪算法是以當(dāng)前情況為基礎(chǔ)追求局部最優(yōu)解,可以針對(duì)航空器隊(duì)列發(fā)出的推出申請逐一完成牽引車的分配,對(duì)動(dòng)態(tài)調(diào)度問題有一定的解決能力,航空器牽引車實(shí)時(shí)匹配算法如圖3所示。
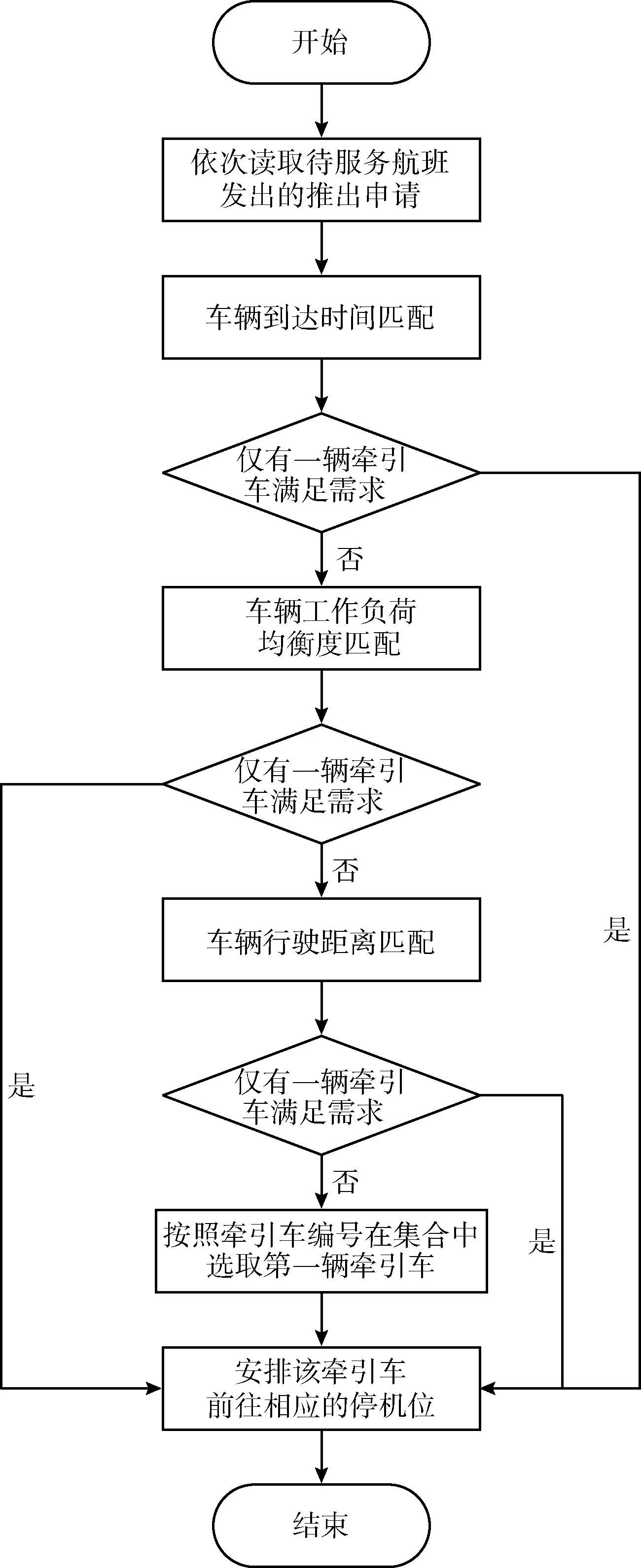
圖3 航空器牽引車實(shí)時(shí)匹配算法
系統(tǒng)在讀取待服務(wù)航空器發(fā)出的推出申請后,依次以車輛到達(dá)時(shí)間、車輛工作負(fù)荷均衡度以及車輛行駛距離為判據(jù)篩選出滿足條件的牽引車集合。
首先實(shí)現(xiàn)車輛到達(dá)時(shí)間的匹配,篩選出當(dāng)前時(shí)刻處于空閑狀態(tài)的牽引車集合,如若沒有空閑車輛,則選定完成當(dāng)前任務(wù)時(shí)刻最早的牽引車。車輛工作負(fù)荷均衡度匹配是對(duì)每輛牽引車服務(wù)過的航班數(shù)進(jìn)行非降序排列并篩選出服務(wù)航班數(shù)最少的牽引車集合。最后再對(duì)每輛牽引車行駛總距離完成非降序排列,篩選出行駛總距離最少的牽引車,從而實(shí)現(xiàn)車輛行駛距離的匹配。若此時(shí)滿足條件的牽引車仍多于一輛,則按照車輛序號(hào)順序隨機(jī)指派一輛牽引車前往服務(wù)。
基于上述算法建立了如圖4所示的航空器牽引車實(shí)時(shí)匹配模型。

圖4 航空器牽引車實(shí)時(shí)匹配模型
模型中從上至下的3個(gè)替代變遷分別對(duì)應(yīng)于流程圖中的車輛到達(dá)時(shí)間匹配、車輛工作負(fù)荷均衡度匹配和車輛行駛距離匹配。每個(gè)替代變遷后的節(jié)點(diǎn)庫所分別表示航空器的最新狀態(tài)和經(jīng)過篩選后的牽引車集合狀態(tài)。
發(fā)出推出申請后的航空器首先與牽引車集合Tug同時(shí)綁定于Arrival Time替代變遷,目的是篩選出滿足時(shí)間要求的牽引車集合。經(jīng)過第一步篩選后的牽引車集合和航空器同時(shí)綁定于Load Balance替代變遷,篩選出服務(wù)航班數(shù)輛最少的牽引車集合。Airport以鄰接矩陣的格式存儲(chǔ)目標(biāo)機(jī)場內(nèi)不同位置點(diǎn)間的距離,通過Distance替代變遷搜索出每輛牽引車當(dāng)前位置與待服務(wù)航空器間距離并計(jì)算出行駛到目的點(diǎn)的時(shí)間。經(jīng)過3個(gè)替代變遷篩選后產(chǎn)生唯一滿足條件的牽引車,系統(tǒng)安排該牽引車前往相應(yīng)的停機(jī)位進(jìn)行服務(wù)。
2.5 航空器推出沖突
在機(jī)場運(yùn)行高峰時(shí)段,鄰近停機(jī)位航班常會(huì)因離港時(shí)間過近而引發(fā)沖突。當(dāng)航空器側(cè)向推出時(shí)與同側(cè)鄰近停機(jī)位上另一正要推出的航空器由于安全間隔而產(chǎn)生沖突[15],發(fā)生推出沖突后的解決方案是后機(jī)在原地等待,只有當(dāng)前機(jī)推出并滑行通過推出安全點(diǎn)后,后機(jī)才能開始推出,推出沖突會(huì)導(dǎo)致牽引車使用時(shí)間的增加以及實(shí)際推出時(shí)間的延遲,推出沖突的模型如圖5所示。
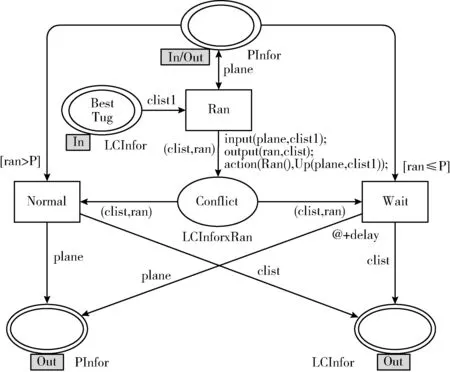
圖5 航空器推出沖突模型
待服務(wù)航空器與上一步篩選出的牽引車同時(shí)綁定于變遷Ran,通過Ran在庫所Conflict中產(chǎn)生隨機(jī)數(shù)ran,再根據(jù)Normal和Wait上的守衛(wèi)函數(shù)判斷航空器推出沖突事件是否發(fā)生。當(dāng)ran>P時(shí),變遷Normal使能,航空器正常推出;當(dāng)ran≤P時(shí),沖突產(chǎn)生,變遷Wait使能。P表示發(fā)生推出沖突的概率。時(shí)間延遲delay表示產(chǎn)生推出沖突后航空器和牽引車需要在原地等待的時(shí)間。
2.6 航空器推出過程
航空器推出后伴隨著牽引車和航空器信息的更新,航空器推出過程模型如圖6所示。
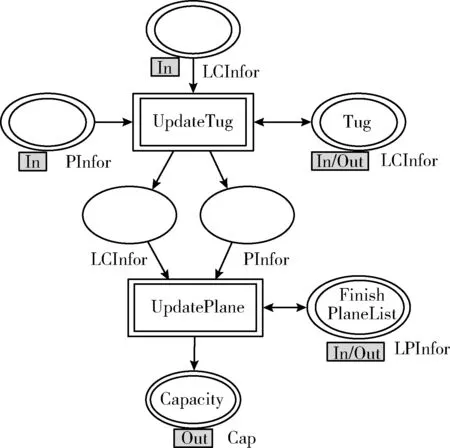
圖6 航空器推出過程模型
首先通過替代變遷UpdateTug,代表牽引車的托肯重新回到牽引車資源庫所(Tug),此時(shí)牽引車服務(wù)過航班序列、當(dāng)前時(shí)刻位置、可為下一航班開始服務(wù)時(shí)刻、行駛總距離等屬性隨之更新。下一步再通過替代變遷UpdatePlane完成航空器信息的更新,代表航空器的托肯進(jìn)入已被推出航空器隊(duì)列庫所(Finish PlaneList),記錄航空器被服務(wù)后的最終狀態(tài),包括匹配的牽引車編號(hào)、牽引車到達(dá)時(shí)刻、開始推出時(shí)刻、完成推出時(shí)刻等屬性。推出任務(wù)完成后容量庫所中的托肯也完成更新,服務(wù)對(duì)象轉(zhuǎn)變?yōu)橄乱患馨l(fā)出推出申請的航空器。
3 系統(tǒng)仿真分析
選定天津?yàn)I海國際機(jī)場作為研究對(duì)象,驗(yàn)證HTCPN動(dòng)態(tài)調(diào)度仿真系統(tǒng)解決實(shí)際問題的有效性。機(jī)場停機(jī)位布局如圖7所示,特種車輛需嚴(yán)格按指定路線行駛,即圖中各停機(jī)位之間的連接線,牽引車的停車場位于118號(hào)和201號(hào)停機(jī)位之間。
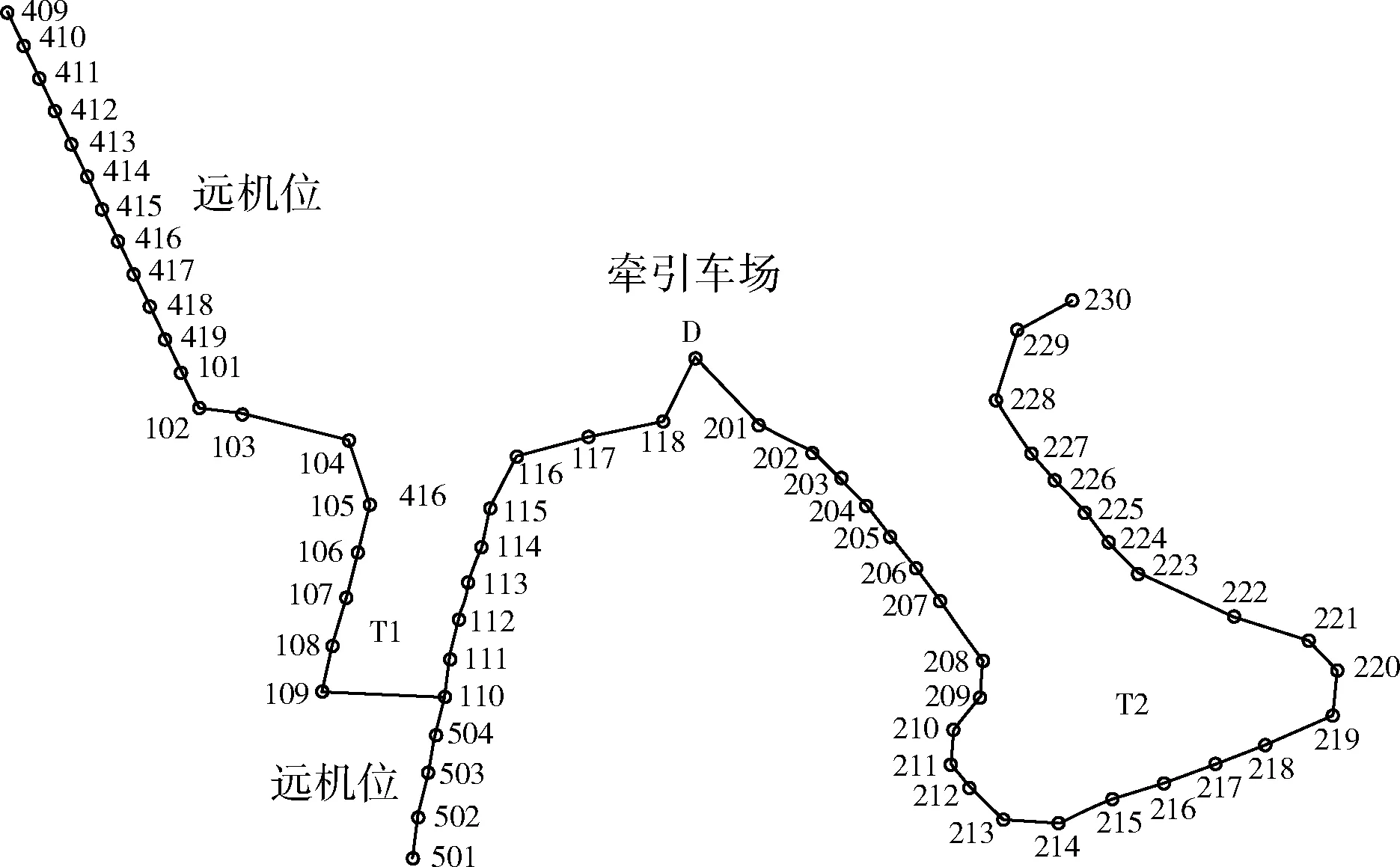
圖7 天津機(jī)場停機(jī)位布局
根據(jù)地理位置可以得出不同地面點(diǎn)間的鄰接關(guān)系,并計(jì)算出任意兩個(gè)地面點(diǎn)之間的最短距離。根據(jù)文獻(xiàn)[16]中的通用配置方法可估算出天津機(jī)場牽引車?yán)碚撆渲脭?shù)量為12輛。表3為仿真實(shí)驗(yàn)中假設(shè)的推出作業(yè)時(shí)間均值與機(jī)型的關(guān)系。
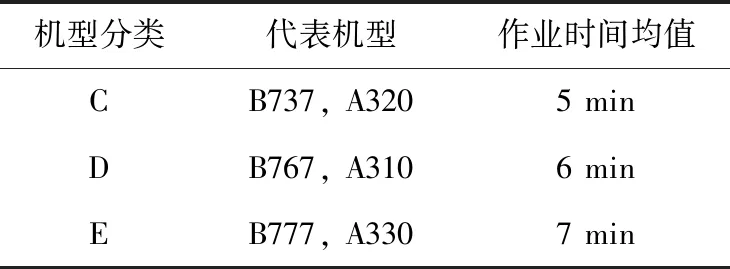
表3 作業(yè)時(shí)間均值
基于蒙特卡洛方法[17]對(duì)高峰時(shí)段的牽引車動(dòng)態(tài)調(diào)度進(jìn)行仿真分析,仿真系統(tǒng)中初始設(shè)定航班密度λ=25架次/小時(shí),牽引車行駛速度v=20km/h,作業(yè)時(shí)間的標(biāo)準(zhǔn)差σ=0.5min,推出沖突發(fā)生概率PConflict=20%, 原地等待時(shí)間均值TConflict=5min。 在不同的服務(wù)航班數(shù)量下分別進(jìn)行100次獨(dú)立實(shí)驗(yàn),圖8和圖9顯示了牽引車工作負(fù)荷均衡度和牽引車平均行駛總距離優(yōu)化前后結(jié)果的對(duì)比。
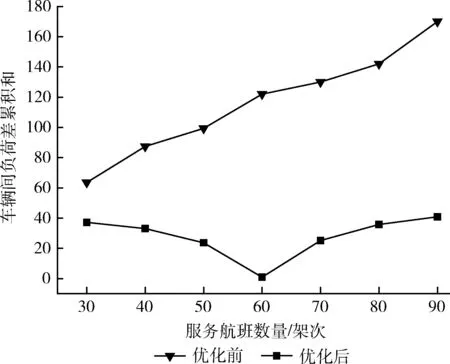
圖8 車輛間工作負(fù)荷差累積和
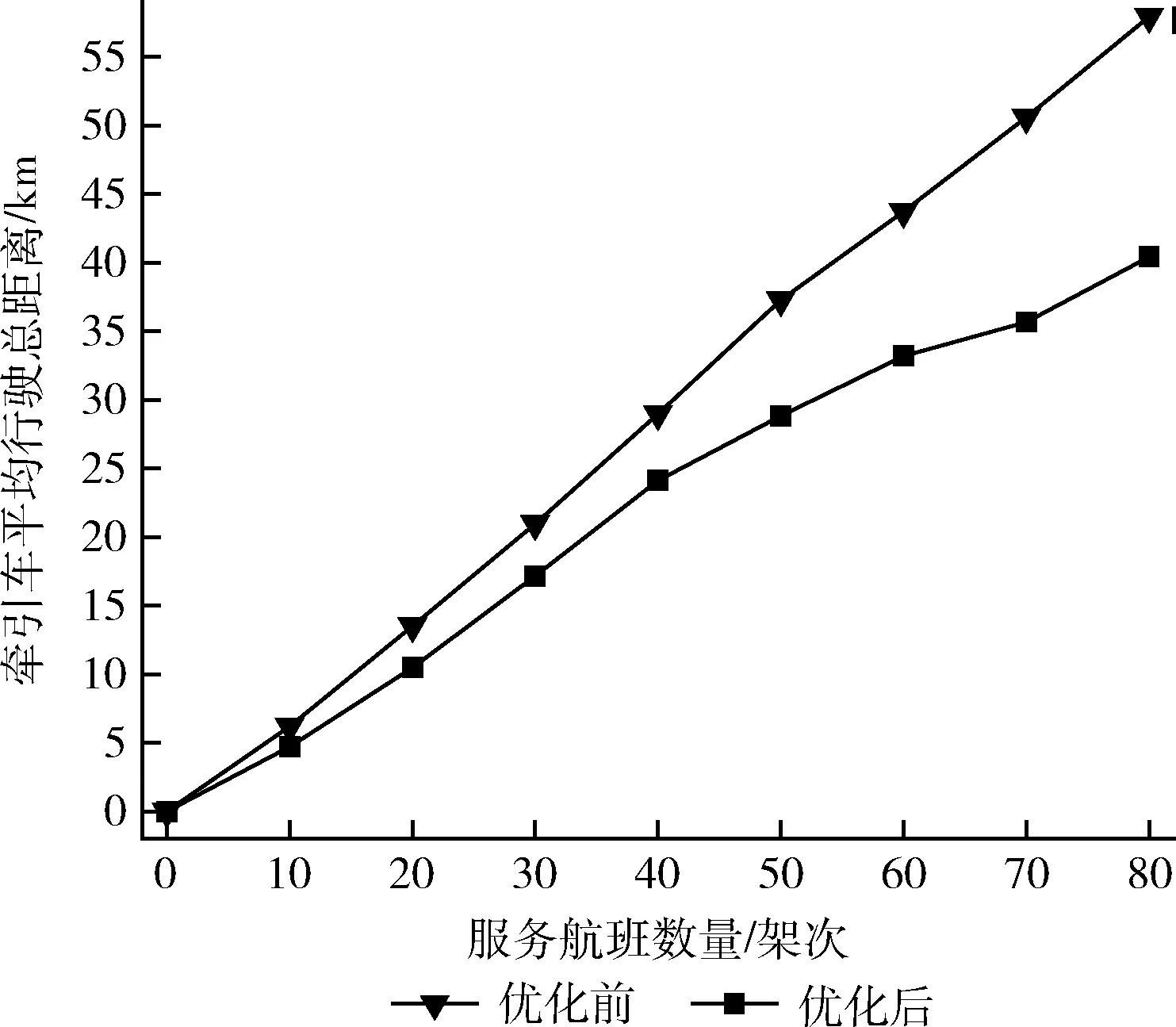
圖9 牽引車平均行駛總距離
圖8的縱軸是表征不同車輛工作負(fù)荷均衡度的負(fù)荷差累積和∑i,j∈V|Ni-Nj|, 優(yōu)化前車輛負(fù)荷差累計(jì)和與服務(wù)航班數(shù)量呈現(xiàn)正相關(guān)的趨勢。優(yōu)化后的結(jié)果大幅降低,負(fù)荷差累計(jì)和隨航班數(shù)量的增加近似周期性變化,在服務(wù)航班數(shù)量為60時(shí)達(dá)到最低點(diǎn),由于實(shí)驗(yàn)中12輛牽引車被分配的任務(wù)數(shù)幾乎相等,所以車輛間工作負(fù)荷差累積和趨近于0。
由圖9可見,場面內(nèi)所有牽引車平均行駛總距離與服務(wù)航班數(shù)量的關(guān)系。隨著服務(wù)航班數(shù)量的累加,行駛總距離的優(yōu)化結(jié)果會(huì)更為顯著。
為體現(xiàn)仿真系統(tǒng)對(duì)隨機(jī)變化的動(dòng)態(tài)反應(yīng),在保證離港航班信息相同的前提下,可以將系統(tǒng)中一些隨機(jī)化處理的數(shù)據(jù)轉(zhuǎn)化為固定的常量再次實(shí)驗(yàn)后進(jìn)行對(duì)比分析。在對(duì)照組實(shí)驗(yàn)中,將發(fā)生航空器推出沖突的概率設(shè)置為0,牽引車推出航空器的作業(yè)時(shí)間不再服從高斯分布,所有航空器的推出時(shí)間均為5 min。
表4中分別羅列了引入常量數(shù)據(jù)和隨機(jī)數(shù)據(jù)每輛牽引車依次服務(wù)過的航班序列。
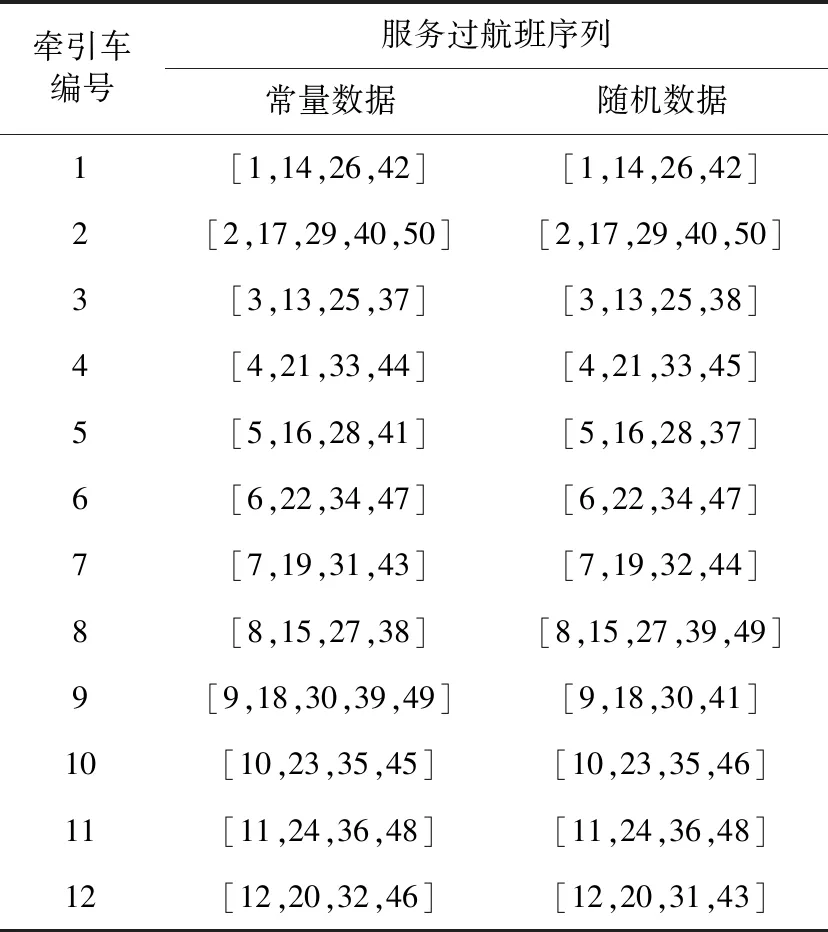
表4 牽引車服務(wù)過航班序列
結(jié)合每個(gè)航空器托肯最終狀態(tài)下攜帶的牽引車到達(dá)時(shí)刻、開始推出時(shí)刻和完成推出時(shí)刻分別繪制了兩次實(shí)驗(yàn)結(jié)果對(duì)應(yīng)的甘特圖,如圖10和圖11所示。
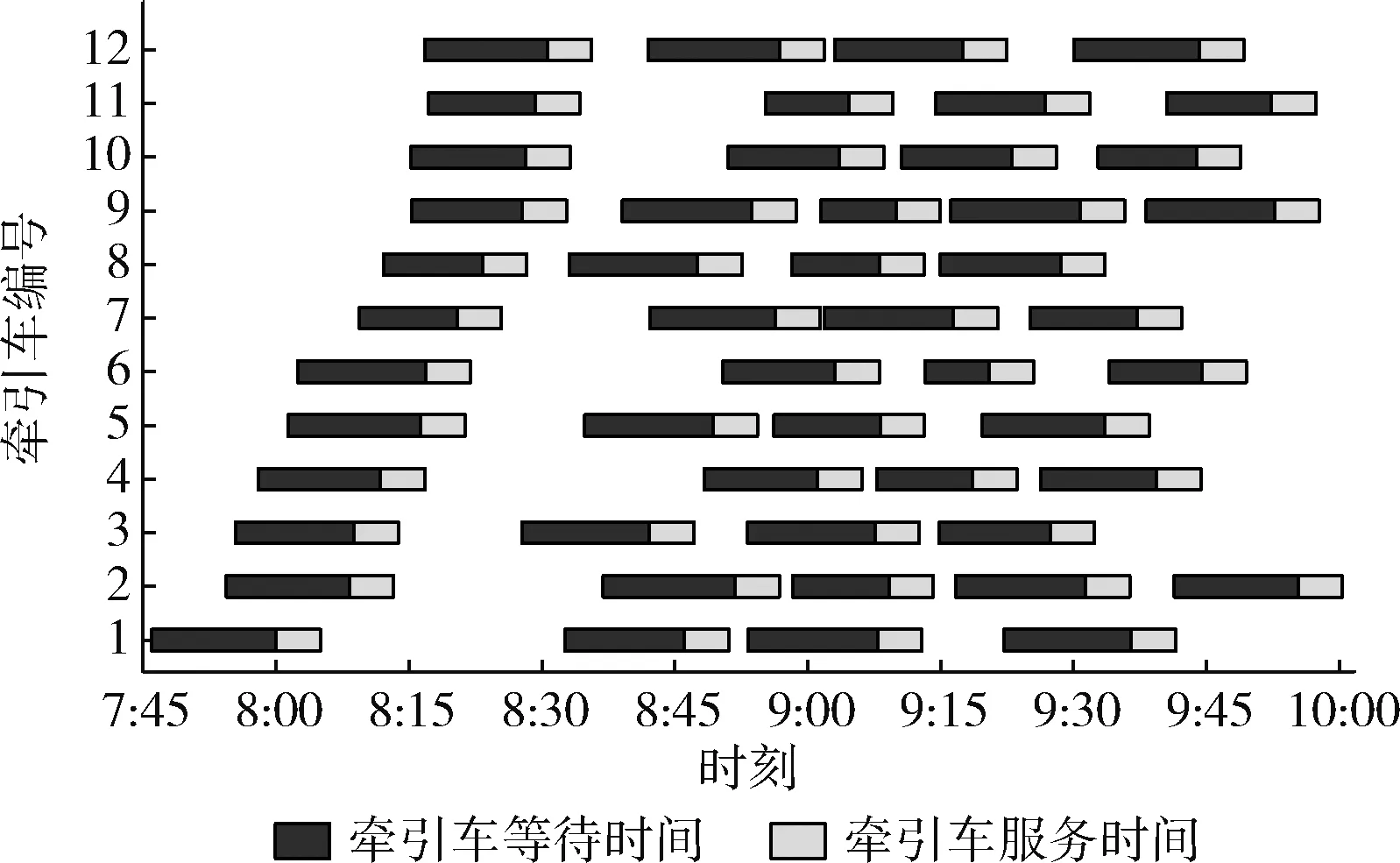
圖10 采用常量數(shù)據(jù)時(shí)牽引車調(diào)度結(jié)果
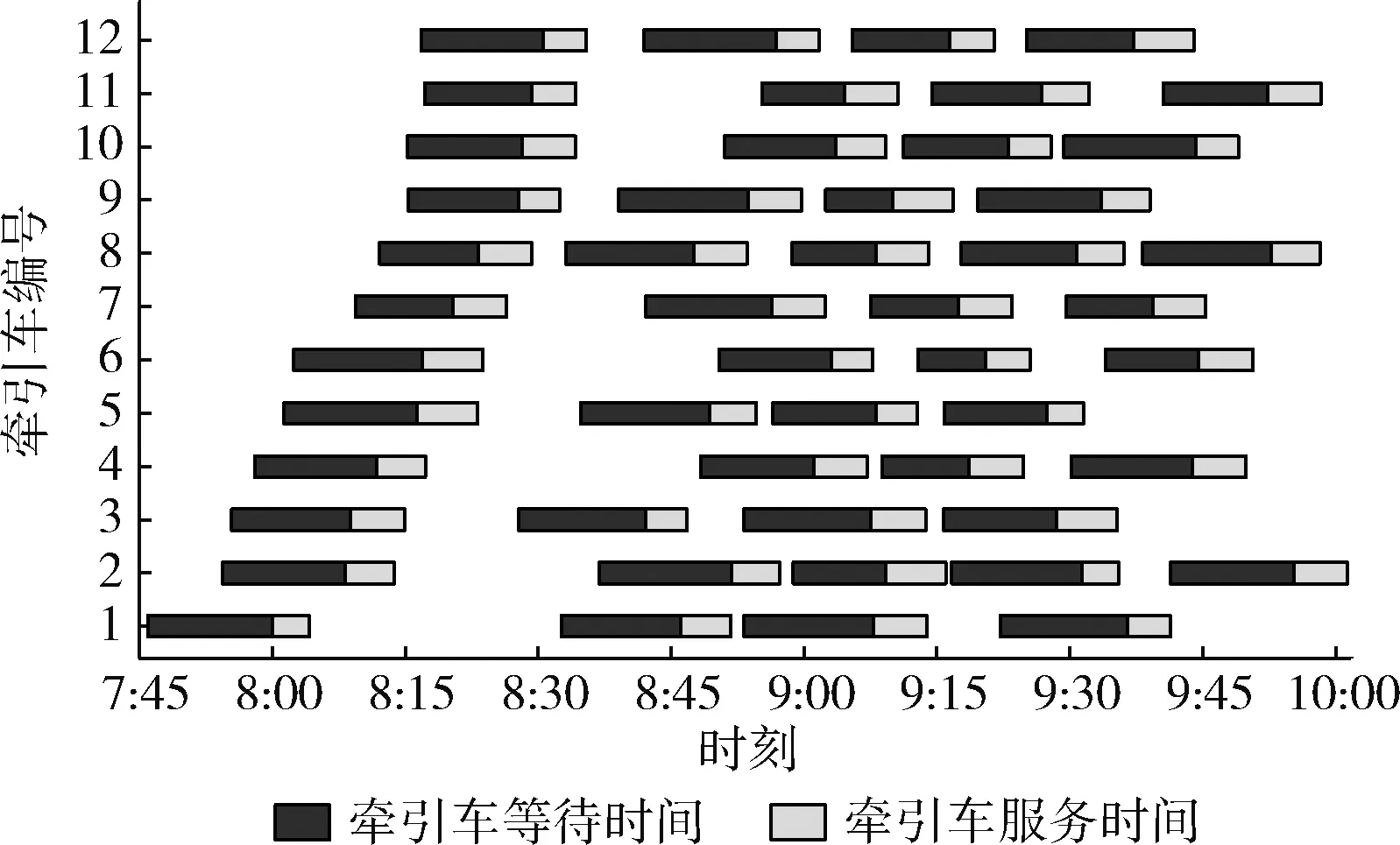
圖11 采用隨機(jī)數(shù)據(jù)時(shí)牽引車調(diào)度結(jié)果
綜合表4、圖10和圖11可以發(fā)現(xiàn),當(dāng)考慮到航空器發(fā)生推出沖突的可能性以及推出時(shí)間分布的隨機(jī)性后,牽引車的等待時(shí)間和服務(wù)時(shí)間會(huì)相應(yīng)地受到影響,此時(shí)系統(tǒng)會(huì)以當(dāng)前情況為基礎(chǔ)追求局部最優(yōu)解,因此航空器與牽引車的匹配方案較采用常量數(shù)據(jù)時(shí)產(chǎn)生了較大的變化。
民航局相關(guān)文件規(guī)定,牽引車應(yīng)在待服務(wù)航空器預(yù)計(jì)離港時(shí)刻前5 min到位,否則將被視作晚點(diǎn)到達(dá)。由圖10和圖11可見,每個(gè)航班任務(wù)的牽引車等待時(shí)間均大于5 min,表明沒有延誤發(fā)生,且優(yōu)化后每輛牽引車的任務(wù)量得到了合理的分配。
調(diào)整航班密度λ和牽引車數(shù)量N進(jìn)一步評(píng)估天津機(jī)場牽引車的保障能力。在每組參數(shù)下進(jìn)行200次蒙特卡洛實(shí)驗(yàn),牽引車晚點(diǎn)率隨λ和N的變化關(guān)系如圖12所示。
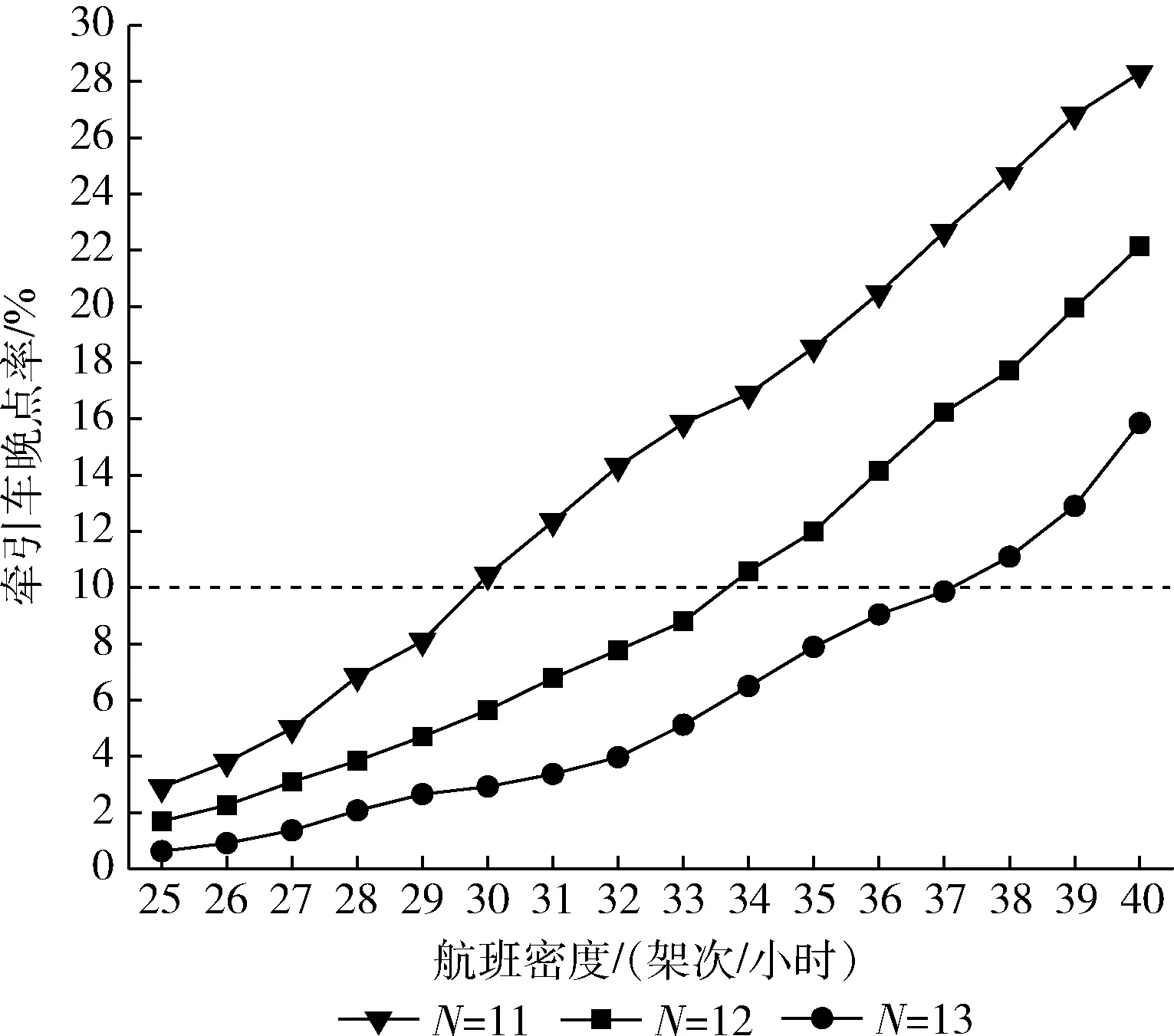
圖12 牽引車晚點(diǎn)率變化曲線
選擇以晚點(diǎn)率10%作為評(píng)估保障能力合格與否的臨界值。從圖中可以發(fā)現(xiàn),當(dāng)λ≤29架次/小時(shí),11輛牽引車就可以將晚點(diǎn)率控制在10%之下,表明機(jī)場當(dāng)前配置的12輛牽引車是冗余的,此時(shí)可適當(dāng)減少場面內(nèi)牽引車的使用數(shù)量;當(dāng)30架次/小時(shí)≤λ≤33架次/小時(shí),當(dāng)前機(jī)場配置剛好滿足準(zhǔn)點(diǎn)要求,牽引車數(shù)量應(yīng)當(dāng)維持現(xiàn)狀;當(dāng)34架次/小時(shí)≤λ≤37架次/小時(shí),現(xiàn)有配置已無法滿足需要,配置13輛牽引車才可使得晚點(diǎn)率降低到10%以下;當(dāng)λ繼續(xù)增大時(shí),在現(xiàn)有配置下增加兩輛牽引車才可有效改善牽引車的延誤問題。
4 結(jié)束語
基于層次賦時(shí)著色Petri網(wǎng)理論搭建了機(jī)場牽引車動(dòng)態(tài)調(diào)度仿真系統(tǒng)。根據(jù)航空器實(shí)時(shí)發(fā)送的推出申請完成牽引車的動(dòng)態(tài)分配。同時(shí)考慮了運(yùn)行過程中各個(gè)環(huán)節(jié)的隨機(jī)性以及高峰時(shí)段可能發(fā)生的推出沖突問題。在還原機(jī)場現(xiàn)有調(diào)度模式的基礎(chǔ)上,對(duì)調(diào)度過程進(jìn)行了多目標(biāo)優(yōu)化,首先實(shí)現(xiàn)航班延誤最少這一基礎(chǔ)目標(biāo),之后依次實(shí)現(xiàn)不同車輛間工作負(fù)荷均衡度最高和車輛行駛總距離最短的優(yōu)化目標(biāo)。以天津?yàn)I海國際機(jī)場為例,通過蒙特卡洛實(shí)驗(yàn)驗(yàn)證了優(yōu)化的有效性,同時(shí)驗(yàn)證了本方法可以對(duì)目標(biāo)機(jī)場的牽引車保障能力進(jìn)行評(píng)估,最后通過本方法預(yù)測出在不同航班密度下必要的牽引車配置數(shù)量。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19