基于機械手搬運工件的自動化系統設計
2021-01-20 12:02:18劉凱
甘肅科技縱橫 2021年9期
關鍵詞:設計
劉凱

為了提升機械手搬運工件自動化系統科學性和智能性應用質量,滿足運動學應用要求,提高工業企業智能化發展水平,積極推動工業改革轉型進程,要對機械手的運動過程予以全面分析。結合工作原理以及控制系統設計要點分析機械手的整體設計方案,并有效評估硬件設計內容和軟件設計內容的具體處理細節,分析主控單元、電機驅動單元、系統電源、運動控制模塊以及PLC控制模塊的具體內容,利用Matlab軟件分析運動軌跡,以便于建立對比分析和處理框架。通過仿真分析模塊,驗證出機械手搬運工件自動化系統的應用能大幅度降低人工勞動量,減少企業用人成本,也能提升工作人員的工作質量,避免人工操作危險性較大作業時的危險概率,保障人身安全。
?????
伴隨著市場經濟的不斷發展,工業企業要想提升市場核心競爭力,就要建構完整的技術分析模式,全面提高機械手相關運動軌跡的研究水平,發揮技術優勢,打造智能化、自動化轉型方案,實現經濟效益和社會效益的和諧統一。
1.1 工作原理
機械手主要的組成部分包括驅動裝置、控制系統等,總體結構設計要按照先后順序完成相應模塊的工作內容。利用電動推桿驅動機械手的抓臂,能完成貨物的搬運管理,推桿在最短收縮位置時末端執行結構會將相應獲取下降到指定的位置,然后驅動機械抓手和導桿帶動右邊的小抓手,開放到適當的角度和距離就能完成相應的工作。另外,機械手底座電動推桿驅動平行四邊形結構制定搬運指令,保證初始位置搬運到指定的重點位置。除此之外,機械手還能結合貨架的實際高度完成升降調控,在重復動作的過程中完成貨物的搬運。
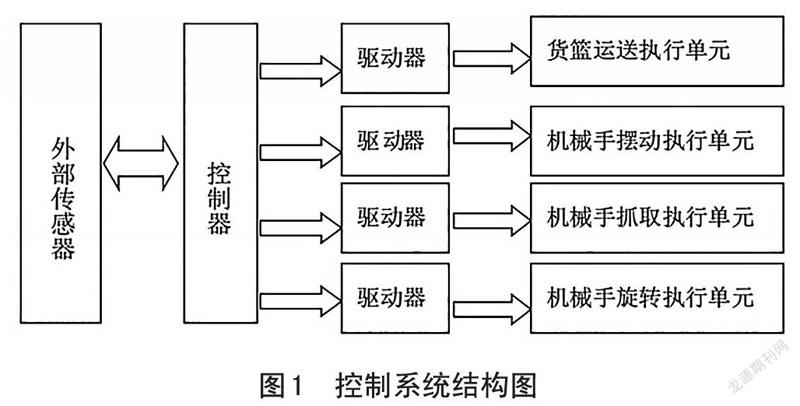
1.2 控制系統設計
在控制系統中,外部傳感器和控制器的相互作用,能有效維持驅動器的應用效果,匹配“貨籃運送執行單元”、“機械手擺動執行單元”、“機械手抓取執行單元”、“機械手旋轉執行單元”,就能建構完整的控制器處理框架。
首先,外部傳感器能及時完成貨籃實際位置信息的讀取和分析,并且將檢測有效的信息數據轉變為中央控制器獲取的電信號,維持綜合應用流程的規范性,確保處理效果滿足預期。
其次,控制器能對相應的模塊予以識別處理,并且配合機械手完成處理工作,促進機械手快速完成搬運處理工作。機械手的相關動作過程圖配合電磁閥門,結合PLC輸出繼電器控制模式,使用輸出端維持整體應用效果。
最后,利用延時控制回路就能對繼電器等相關元件予以實時性管理,特別是在一些易燃易爆和粉塵環境中,處理模式能更好地維持應用效果。
2.1 控單元
2.1.1 數據存儲模塊
選擇AT24C04數據存儲模塊,能有效實現數據信息的及時性富集和儲存管理,保證電路連接的合理性和規范性,并且,信號端還能配合SDA建立主動單元連接機制,設計中符合16位回應要求。
2.1.2 復位模塊
為了維持機械手搬運工件應用的規范性,機械手的X軸、Z軸和U軸、V軸都要設置發光元器件,復位時結合槽型光耦點維持遮光效果。需要注意的是,因為機械手在實際操作中無法回到原點位置,因此,輸出的電壓一般都是高電平,以保證電磁干擾環境的適應性和合理性。另外,工業設備會對光耦采集信號數據產生影響,所以,要結合傳感器輸入信號的隔離處理。
2.1.3. 編碼器模塊
在實際操作工序中,為了全面提升電機系統旋轉角度的速度測試的合理性,就要配合增量編碼器維持功能性電機速度和位移測試工作,匹配不同相處理要求,盡量提升引腳配置的合理性。
1)在編碼器輸出端輸入A相和B相。
2)借助10K電阻維持電源DC5V的應用,保證部分關鍵引腳處于懸空狀態。
3)結合STM32單片機應用要求,輸入引腳內容,完成配置。
2.1.4 串口屏驅動模塊
結合實際調研數據分析,目前串口屏幕以及TFT屏幕的應用較為廣泛,為了維持STM32單片機應用的效果,要匹配總線線路連接結構,提升液晶顯示屏幕應用質量。在選取屏幕線路排線的過程中,要維持線路距離為20cm,不僅要考量工業現場的生產環境,也要全面分析傳輸距離等,從而基于FPGA技術進行串口應用系統的綜合處理,維持串口指令的合理性和規范性,依據單片機發送的指令就能建立貼合串口通信協議的數據連接和傳輸模式。
2.2 電機驅動單元
在電機驅動單元設計過程中,要按照X軸、Z軸和U軸共同處理的方式予以控制,其中,U軸電機為57步進電機,其余皆為42步進電機。本文選取的是THB6128驅動芯片,配合電壓220V、信號電壓5V/24V脈沖信號,能維持較好的低導通電阻性能,并且具備較好的耐壓數值(40V)。進電機選取的是混合步進電機,結合永磁式步進電機和反應式優勢。
另外,系統在選擇電阻參數的過程中,要確保互動電阻器能匹配電阻值,維持在K級電阻模式,設置對應的地線維持連接模式。與此同時,高速光耦和電阻的連接能在提升單片機信號處理效果以及抗干擾水平。
2.3 系統電源
在整個機械手搬運工件自動化系統硬件模塊內,為了維持其穩定性、安全性,要匹配較好的電源,本文選定5V電源作為電源模塊,利用LM2575芯片。并且,要選取系統電流恒定模式,確保電路輸出電流不會受到影響。
2.31. 單片機選型
采取的是![]() 型號32位單片機,其實際的電壓參數選取范圍[2.0:4.6],一般是利用4.3V,能在提升穩定性的同時,減少電源系統對單片機造成的影響。
型號32位單片機,其實際的電壓參數選取范圍[2.0:4.6],一般是利用4.3V,能在提升穩定性的同時,減少電源系統對單片機造成的影響。
2.3.2 主控單元電源
因為主控單元電源模塊在實際應用中具有重要的作用,因此,要維持串口屏驅動模塊、復位模塊、編輯器模塊等子模塊的應用效果。在基礎電源結構設計過程中,要在維持主控單元模塊電流量最小的同時,配合使用USB接口維持電源應用質量。一方面,輸入端輸出的濾波和網絡連接,確保芯片的濾波轉化過程有序開展。另一方面,在完成連接的同時,選取參數對應性。
2.4 機械手設計單元
2.4.1 曲柄連桿結構設計
為了提升機械手搬運工件自動化系統中機械手單元的靈活性和可靠性,就要結合運動學規律對曲柄連桿結構的應用要求予以分析,為此機械手臂的規范性。因為,本文設計的是平行四邊形機械手臂結構,因此,要想提升其穩定性和應用效果,就要在設計過程中對主要施加部位予以處理,維持剛度和強度參數的同時,保證其處于長時間工作狀態下依舊能及時完成動作指令。另外,在設計材料選擇的過程中,一般是選取工業鋁型材料,能借助氧化處理提升耐久性,且清洗護理較為方便,能選定固定角件完成配置安裝和處理工作。
2..4.2 抓手設計
抓手設計也是機械手設計單元中較為關鍵的環節,是機械手搬運工件自動化系統和獲取直接接觸的位置,此時,為了保證機械手設計實效性,就要整合拾取和夾緊動作設計的流程,維持貨物穩定性。盡管機械手抓結構是依據人體工程學相應功能完成設計的,但是畢竟和人手動作存在差異,要利用不同部件連接方式完成指定動作。一方面,結合使用功能和機械手手部結構維持傳遞的規范性。另一方面,能匹配電動推桿驅動兩岸結構,滿足抓取和放下功能需求。
2.4.3 驅動裝置設計單元
結合相關內容和設計要求可知,機械手驅動裝置是電動模式,其質量直接影響機械手的搬運效率和質量,因此,要結合指令要求完善其設計內容,確保指令操作匹配度符合預期。若是電動推桿的推力不足,機械手就不能完成相應的搬運作業,若是推力較大,則會消耗過多的資源,造成資源浪費的同時也會提高系統設計成本。綜上所述,要選取合適的電動推桿,保證其最大推力能在貨物最大負載力以上。基于此,本文選取24V,空載為200mm/s的手臂電動推桿結構。
在明確工藝整體流程的同時,調控各個模塊信息,維持工藝流程的同時,優化其操作質量。整體設計原理見圖2:
3.1 PLC控制電路
3.1.1 PLC直接控制電動推桿
在機械手臂應用過程中,電動推桿具有非常重要的作用,主要是負責手臂抓取和驅動處理,在導通對應節點后,機械手臂就會在推桿電機的作用下接通電流,此時,電動推桿形成收縮趨勢,擺動到固定的角度位置,這個動作能實現機械手臂移動。另外,在導通其他特定節點后,機械手臂就能在電動推桿電機的作用下形成收縮,然后建立抓手夾緊操作,循環重復就能維持控制效果。
3.1.2 PLC直接控制步進電機
若是機械手臂完成了貨物籃抓取操作作業,為了避免其移動到其他位置,就要利用旋轉手臂維持其處于固定的位置區域,從而保證后續動作的規范性。首先,建立CP1HPLC模塊,按照對應的連接處理方式予以聯動處理。其次,在發送脈沖指令到步進電機驅動器后,就要完成相應的指令分析和信息處理。最后,供電給步進電機,完成相應作業操作。
3.1.3 PLC控制直流電機
在傳送帶運轉的過程中,運輸貨物籃要匹配對應的指令內容,在機械手臂所處位置的光電傳感器感應參數后,才能建立識別和處理系統,維持驅動器的應用規范性,并依據指定區域內相應指令標準完成操作。
3.2 運動控制模塊
3.2.1 電機驅動模塊
主要包括電機端口配置單元、電機方向設置單元等,在初始化模塊處理過程中,和電機驅動模塊予以電氣連接,維持驅動合理性,就能更好地提升脈沖信號的處理效果。基于此,為了實現電機驅動芯片的應用目標,要在掌握電平值的同時,結合細分數據設置不同的細分模塊,以便于實時性了解驅動狀態。
3.2.2 梯形加減速模塊
要依據定時器、步數計算器、開關脈沖單元以及頻率單元等進行全面分析,從而維持機械手搬運工件自動化系統軟件結構的合理性。
總而言之,在機械手搬運工件自動化系統設計過程中,要結合總體設計方案的應用要求,強化對硬件、軟件的處理水平,匹配對應型號的設備和軟件系統,也要結合PLC控制理念,保證控制體系總體工藝設計內容和參數模型等都能符合實際要求,從而提升參數處理效果,確保機械手臂運動的流暢性,也為工業企業實現可持續發展奠定基礎。
[1]林偉,赫英歧. 基于FX2N PLC的工件機械手搬運系統設計[J]. 冶金與材料,2017,37(6):18,20.
[2]帖秋菊. 基于機械手搬運工件的自動化系統設計[D]. 四川:電子科技大學,2019.
[3]何玉輝,王海旭,苗玉剛,等. 生產線搬運機械手控制系統設計[J]. 自動化技術與應用,2020,39(6):140-143.
[4]汪嵐,程永強,陳育明. 基于PLC與觸摸屏的工業搬運機械手控制系統設計[J]. 中原工學院學報,2018,29(3):61-65.
[5]黃培. 基于S7-200的搬運機械手的控制系統設計[J]. 辦公自動化,2016(11):44-46.
[6]趙丹丹,黃越,郭寧,等. 機械手搬運機器人機電一體化設計[C]. 2016年海峽科技專家論壇暨海峽兩岸智能制造(泉州)研討會論文集. 2016:18-24.
[7]趙春云. 基于PLC的礦用搬運機械手的安裝控制研究[J]. 機械管理開發,2019,34(6):231-233.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
