基于SVM和LT-IEPF的自動泊車可達空間算法
2021-01-21 05:29:32蔡緒忠
重慶理工大學學報(自然科學) 2020年12期
蔡緒忠,吳 杰
(華南理工大學 機械與汽車工程學院,廣州 510640)
根據國家發改委發布數據,我國大城市汽車和泊車位平均比例約1∶0.8,而中小城市汽車和泊車位比例約為1∶0.5[1]。隨汽車保有量的快速增長,這2個比例逐漸增大,不僅致使城市泊車位資源更加緊張、泊車空間更加狹小,而且導致更多汽車刮蹭、碰撞等安全事故。因此,在惡劣泊車環境中,采用可精準識別可泊車位的自動泊車系統,進而可靠、精準地自動泊車入庫具有重要意義[2]。
目前在自動泊車系統中,有3種主要可泊車位檢測方案:基于自由空間檢測的方法、基于泊車車位標記檢測的方法和基于自由空間檢測與泊車車位標記檢測相結合的方法[3-7]。Jung H G等[3]提出了利用掃描激光雷達檢測矩形拐角和圓形拐角識別車輛之間可泊車位的新穎且具魯棒性方法,該方法可以精準地檢測識別出可泊車位,但激光雷達價格昂貴不適合普及推廣;Suhr JK[4]提出了一種利用RANSAC和倒角匹配算法視覺方案,在地下停車庫和室內環境中檢測平行泊車位,但視覺容易受照明條件和天氣因素影響且必須要求停車場具有車位線;王文飛等[5-6]提出的超聲波傳感器和視覺傳感器相結合的方法,簡單識別可泊車位然后對結果進行融合,但只能提高車位識別率,并不能給出精準可泊車位的可達空間;張莉莉[7]研究了編碼器和超聲波傳感器的車位檢測方法,但其采用的方法并不能解決超聲波存在波束角且不能給出目標方位信息的問題,只能簡單檢測車位占有率,所以不能精準探測可泊車位。
綜上可知,激光雷達、毫米波和超聲波傳感器等受照明條件和天氣因素等影響較小,且超聲波傳感器成本更低[8],因此,采用車輛側邊超聲波進行自動泊車可達空間算法開發。
在超聲波傳感器識別可泊車位的研究中[9-10]:JEONG SH等[9]提出了一種基于超聲波傳感器的并行停車輔助系統的低成本設計和實現方案,僅需要在正面和側面使用2個超聲波傳感器就可以檢測可泊車位,但該方案使用僅限于簡單場景且識別可泊車位的精度極低。為了解決可泊車位檢測精度問題,PARK W J等[10]利用超聲波傳感器的多重回波特性,采用多重回波車位邊緣檢測算法增強可泊車位的邊緣檢測準確性,提高自動泊車可達空間精度。
根據當前智能駕駛中自動泊車車位檢測現狀,并參考人工智能領域研究成果,本文中研究了基于超聲波傳感器的自動泊車可達空間算法。通過機器學習現已成熟的支持向量機方法分類超聲波點云并利用LT-IEPF進行線段擬合,最終確定泊車可達空間,從而得到目標泊車輪廓及位姿。分類及擬合結果表明:該方法可有效提高泊車可達空間。最后,通過實車驗證,該方法可有效提高可泊車位釋放率,提高泊車效率,具有一定的可行性。
1 超聲波傳感器的基本特性
1.1 超聲波傳感器的工作原理
超聲波傳感器是在高頻電壓激勵下壓電晶片發生高頻振動而產生超聲波,當聲波碰在介質傳播中遇到分界面(即停泊車輛或障礙物)時會產生反射形成回波。通過傳播時間可計算與分界面的距離[11]:
式中:L為超聲波傳感安裝位置到障礙物的距離(mm);C為實際超聲波聲速(m/s);T為聲波傳感從發射聲波到接收回波的時間(s)。
1.2 超聲波傳感器的探測能力
靜止狀態下,通過PVC管對車輛側邊超聲波傳感器進行探測能力試驗。
圖1為超聲波探測能力實驗。由圖1可知,實際情況下超聲波探測范圍并不是理想標準波束角的扇形區域,而是呈不規則形狀,其中每個網格代表100 mm×100 mm的區域范圍。
1.3 超聲波傳感器的可泊車位探測
待泊車輛沿著兩停放的車A、B前進,當車輛停在車B之后時,須探測到滿足可泊車位要求的泊車可達空間,如圖2所示,包括車位的橫向可達空間及其周圍障礙線段,為后續確定精準目標泊車輪廓和位姿做準備(在泊車探測車位過程中平行和垂直停車位性質相同,本文中選取垂直車位進行說明)。
影響泊車可達空間精度的主要因素有:
1)環境因素:溫度、濕度和風速等,其中溫度影響較大。本文中超聲波聲速近似為
式中:C0為零度時的超聲波聲速,即332 m/s;T為溫度(℃)[12]。
2)車輛行駛因素:尋找車位時的行駛速度和與目標車位的距離等因素對可泊車位邊緣檢測效果影響較大,本文中將尋找車位的車速控制在12 km/h之內,與目標車位的側邊距離控制在0.3~2 m。
3)超聲波自身因素:聲波在介質中傳播會存在能量損失,另外由探測能力試驗可知,由于超聲波探測范圍的不規則性容易出現邊緣誤差較大情況(如圖2中邊緣誤差E1和E2),容易導致可泊車位橫向可達空間的縮小,這也是本文中提出算法的原因之一。
2 自動泊車可達空間算法設計
2.1 SVM自動標注分類算法框架
SVM自動標注分類算法的總體框架如圖3所示,依次分為4個階段。
2.1.1 SVM算法求解原理
1995年CORTES和VAPNIK首先提出支持向量機[13](SVM),主要思想是找尋一個分類最優超平面,將目標樣本與非目標樣本快速且準確地分開。
設D={(Xi,yi),i=1,2,…,N,yi∈{+1,-1},Xi∈Rd}為超聲波點集,N為點集數量,yi為各點類別,找到以下超平面方程對點集進行精準的分類:
式中:ω∈R和b∈R分別為垂直于分類超平面的法向量和位移量,函數Y為最終分類類別。
求解支持向量機且滿足:yi(ω·Xi+b)≥1-ξi。由拉格朗日乘子法及KKT條件得到對偶問題:
式中:C是懲罰參數;ξi≥0為分類的松弛變量。
將式(5)轉化為對偶二次規劃問題,即:
本文中采用適用性最強的高斯核函數:
式中,σ>0為高斯核寬帶。
最終得到SVM分類方程:
2.1.2 數據采集與預處理
采用HOKUYO公司URG系列的2D激光雷達,臨時安裝在車輛右側中柱上(圖4藍點13),測量角度范圍為180°,指向角為90°,采集實際泊車場景數據標注樣本數據類型,即確定訓練樣本的類型;超聲波傳感采用SensorTec公司系列型號,并按照圖4所示,在車身前后規定位置各安裝4個短距超聲波(圖4紅點5~12),用于泊車中避障檢測;在車身左右規定位置各安裝2個長距超聲波(圖4紅點1~4),用于泊車中探測可泊車位。本文中泊車可達空間算法主要用到兩側邊4個超聲波雷達。
實車按圖2找車位流程以10 km/h車速,側邊距離為1.5 m沿停車位勻速直線行駛,并將該過程中各傳感信號采集下來。預處理所得數據、界定并剔除有效范圍外的異常數據,同時補償零點數據以及通過濾波算法濾除必要噪點,最后通過MATLAB將泊車場景數據進行可視化,如圖5所示。
2.1.3 橢圓模型自動標注
采用一種橢圓模型標注算法(如圖6所示)對超聲波數據進行自動標注以提高前期數據標注質量和后期模型訓練精度,同時減少人工標注數據的工作量和避免手動標注錯誤,達到數據標注的統一化。
其中a>b>0,?(xi,zi)∈R,為采集激光雷達點云坐標集。分別選取a=0.4 m,b=0.05 m對泊車場景全部數據進行批量自動標注,如圖7所示。
2.1.4 SVM特征向量及參數選取
選取有效的特征指標是SVM訓練有效模型得到精準的泊車位邊緣的關鍵。根據超聲波輸出屬性列表選取表1所示的6個超聲波屬性作為SVM模型訓練的特征向量。
采用高斯核函數進行模型訓練,必須選取最優的懲罰系數C及核函數內部的參數σ,通過交叉驗證和格網搜索結合的方法最終確定最優參數C=8及σ=0.02。將最優參數及標注好的超聲波數據集作為SVM分類器的輸入,對分類器進行訓練,將得到的模型進行快速驗證,預測待驗證樣本。

表1 SVM模型特征向量
2.2 LT-IEPF線段擬合算法
2.2.1 LT-IEPF線段擬合算法框架
傳統的LT算法直線跟蹤性能較好,但對閾值選取較敏感,且其不考慮線段合并問題[14]。而IEPF算法雖然包含了分割和合并兩過程,但容易出現過分割和過合并現象,且其不考慮公共分割點問題[15]。本文中結合LT和IEPF兩算法特點得到的LT-IEPF線段擬合算法更具有適應性,算法框圖如圖8所示。
2.2.2 超聲波點集分割階段
步驟1:利用算法[15]原理,將 超 聲 波 點 集的起始點X1和XN連接,遍歷點集找到離X1XN線段最大距離的點XM,若該點到X1XN的距離dM比初定閥值δ大,則將XM作為斷點并分割為M+1,…,N}2個點集,否則不進行分割。對需要分割的情況,通過:
判斷斷點XM歸屬點集。以此類推,遞歸遍歷整個超聲波點集,直到所有點集不需再分割為止(圖9)。
步驟2:利用LT算法[14]理論,遍歷所有分割及更新后的點集,并對相鄰點集中新產生的端點如Xj+1,到點集所擬合線段的距離dj+1再次進行閥值判斷,如果滿足閥值要求,則將其分入該點集并從另一個點集剔除;否則不做改變(圖10)。
步驟3:重復步驟2,直到沒有新端點產生終止。
2.2.3 超聲波點集合并階段
步驟1:對上一步分割后的相鄰超聲波點集所擬合的直線Lc,m和Lm+1,k進行夾角 ψm,m+1求解,并與閥值ψthd比較,若 ψthd>ψm,m+1則進行步驟2,否則兩線段不做合并,繼續遍歷下一組相鄰線段,直至遍歷完所有線段為止。
步驟2:應用最小二乘法擬合相鄰數據集合并計算擬合誤差平方和E2與預設閥值比較,若比閥值小,合并線段,否則不做合并操作且繼續遍歷下一組相鄰線段,重復步驟1(圖11)。
2.3 目標泊車輪廓及位姿
由于超聲波的探測能力限制,根據超聲波點云初步設定泊車輪廓縱向深度為5 m,泊車輪廓方向由擬合線段方向確定,由此確定目標泊車輪廓ABCDF及目標泊車位姿G[16],如圖12所示。
3 結果與分析
3.1 SVM分類結果
將采集的3 032組超聲波數據樣本,通過橢圓模型自動標注法分好標簽并將標注好的數據集保存分為訓練樣本和驗證樣本。通過訓練樣本訓練得到SVM模型并在驗證樣本數據上進行驗證,結果如圖13所示。圖13中,(a)~(c)是驗證樣本數據中對超聲波點云分類的3個場景,從圖中可看出:與作為實際場景真值的激光雷達點云相比,大部分超聲波點云被準確地分為2類,其分類結果貼近實際泊車場景。
另外,本文中對分類結果進行評估和統計,將每個超聲波數據樣本作為分類質量參考對象,采用準確率作為分類的評價指標:
式中:TP和FP分別為正確和錯誤識別為+1的數量;TN和FN分別為正確和錯誤識別為-1的數量。
另外,本文中還選取其他核函數進行模型訓練并對比分類精度,結果見表2。可知,選取高斯核函數作為分類器的分類精度較好,所得精度可達92.47%。
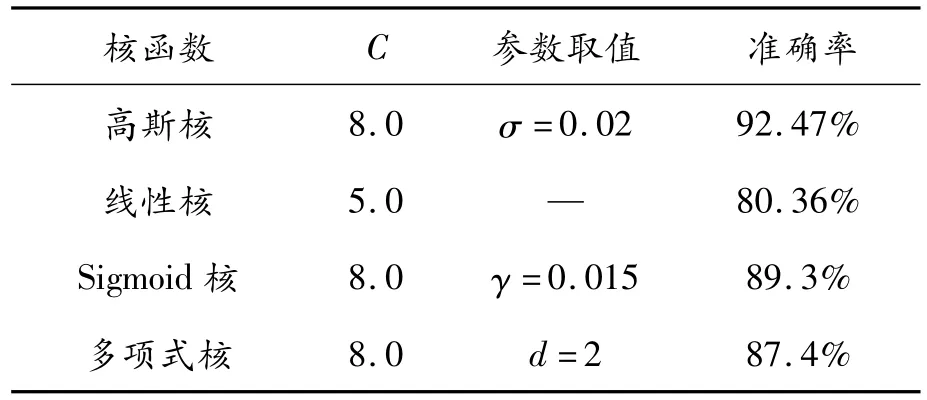
表2 基于不同核函數的SVM訓練效果
3.2 LT-IEPF擬合結果
通過SVM分類得到精準的泊車場景超聲波點云,采用本文中算法對這些有效的超聲波點云進行擬合,并將本文中LT-IEPF擬合算法與LT和IEPF算法進行比較,結果如圖14所示。圖14中,(a)~(c)分別為LT、IEPF和本文中的LT-IEPF算法擬合結果,由(a)可知,LT算法需從起點到終點貫序進行擬合,對閾值選取敏感容易出現過擬合現象。由(b)可知,IEPF算法不能準確確定起點和終點,在擬合車頭弧線部分容易出現過合并現象。由(c)可知,本文中的LT-IEPF算法不僅能準確選取擬合線段的起點和終點,同時避免了過擬合現象。
另外,本文中求出各段的擬合均方根誤差,采用平均誤差作為擬合的評價指標:
式中:RMSEi為第i線段的均方根誤差;n為擬合的線段數目。
由表3可知,本文中采用的算法擬合平均誤差降低到36.55 mm,有較好擬合效果。
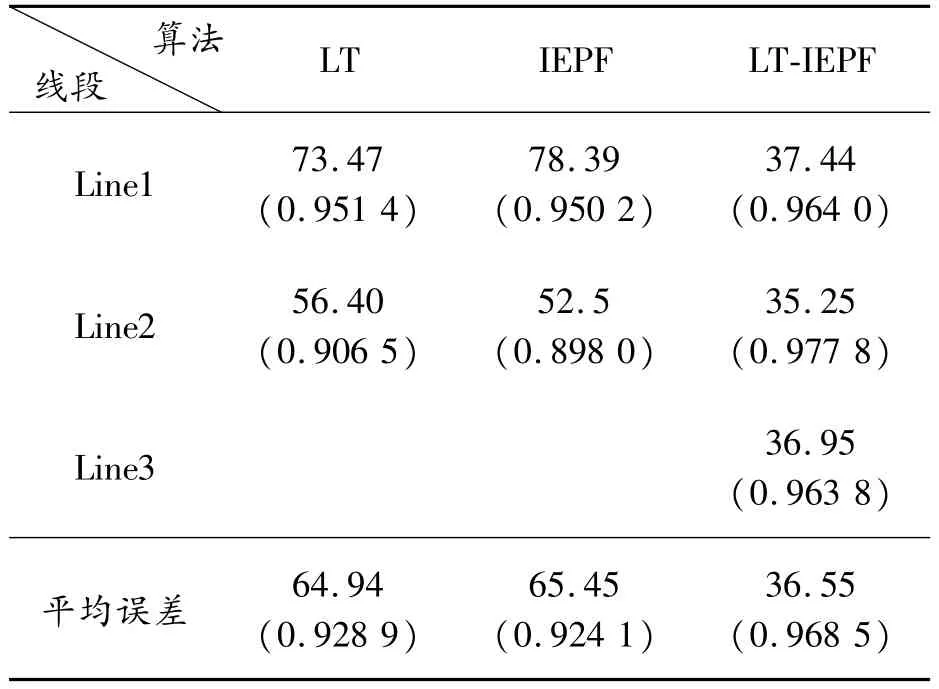
表3 線段擬合均方根誤差結果
3.3 泊車可達空間結果
任意選取6個車位進行算法前后比較。圖15為其中一個車位,在有無停泊車輛區域的超聲波點云被準確分類為o(即分類結果為1)和*(即分類結果為1)。從圖15可看出:不進行點云分類時得到的可達空間L2明顯比實際場景的可泊車位小;采用本文中算法進行分類得到的可達空間L1明顯比大。而E1和E2分別為算法前的左右邊緣誤差。
通過本文中算法分類并擬合確定目標泊車輪廓及目標泊車位姿,最終得到左右邊緣誤差明顯縮小,可達空間明顯擴大,平均可達空間由2.71 m增大到3.09 m,平均可達空間率提高14%。
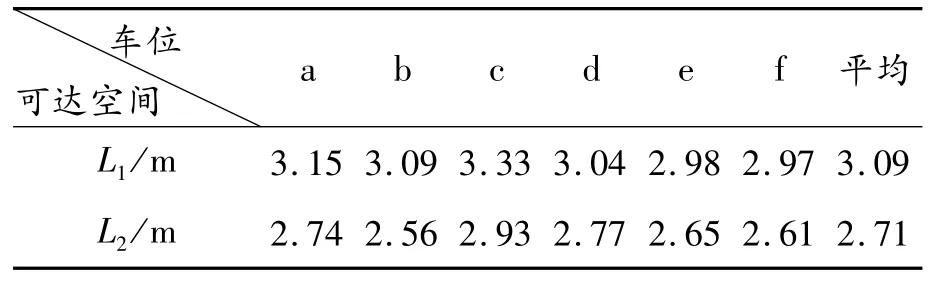
表4 可達空間對比
4 結論
首先以SVM作為分類器建立分類模型對超聲波點云進行分類,再利用LT-IEPF算法對分類后的超聲波點云進行線段擬合,由此得到目標泊車輪廓及目標泊車位姿。選擇高斯核函數并確定最優懲罰因子和核參數σ,模型的分類準確率達到92.47%;且有較好的線段擬合效果;選取的6組車位可達空間率提高14%。經實車驗證,采用新算法后,車位釋放率提高明顯,目標車位橫向可達空間的增大有效降低實時路徑規劃中重規劃的次數,減少泊車中途避障暫停現象,有效提高泊車效率。
在本文中規定的車速和與目標車位側邊距離內的變化對分類的影響可忽略不計。但針對本文中規定范圍外的因素變化,以及車輛非勻速行駛、找車位過程轉向等因素對算法產生的影響,將需要對該算法進一步研究并優化。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46