面向結(jié)腸鏡軟體機器人設計與建模仿真
2021-01-21 05:29:54鄔元富李緣春王依濤
重慶理工大學學報(自然科學) 2020年12期
關(guān)鍵詞:模型
陳 剛,鄔元富,李 偉,李緣春,王依濤
(1.嘉興學院 機電工程學院,浙江 嘉興 314000;2.廣西財經(jīng)學院 經(jīng)濟與貿(mào)易學院,南寧 530007)
當今生活節(jié)奏越來越快、人們的飲食結(jié)構(gòu)和生活方式發(fā)生了較大的變化,癌癥的發(fā)病率也不斷增加,其中結(jié)直腸癌發(fā)病率呈現(xiàn)明顯上升趨勢,在2002—2015年里發(fā)病率由7%上升至13%[1],目前位居我國癌癥發(fā)病率第4位。結(jié)腸鏡檢查是結(jié)腸癌檢測諸多方法中最為可靠、有效的一種,不僅可以進行細胞切片取得病理診斷,而且可以對病灶進行定位、診斷病灶大小。目前的插入技術(shù)迫使外科醫(yī)生在器械的遠端對結(jié)腸鏡末端部進行控制[2]。然而在進行結(jié)腸鏡檢查中,由于結(jié)腸鏡末端部無法實現(xiàn)自主控制,在結(jié)腸鏡推進與取出的過程中,結(jié)腸鏡末端部容易與腸壁發(fā)生不必要的接觸,導致結(jié)腸粘膜的損傷出血甚至腸壁穿孔[3]。
為了減少患者的不適、降低結(jié)腸檢查過程中的操作難度,許多研究者選擇了自動結(jié)腸鏡檢查的方法。在文獻[4]中,作者基于結(jié)腸鏡檢查的2個主要動作,即遠端運動和轉(zhuǎn)向,提出了自動結(jié)腸鏡檢查(也稱為機器人結(jié)腸鏡檢查)的概念。目前,關(guān)于自動結(jié)腸鏡檢查的研究大多集中在利用各種運動機構(gòu)的自推進機器人上,還有一些研究者們致力于研發(fā)無線膠囊結(jié)腸鏡檢查,用于圖像診斷或復雜多參數(shù)檢測[5-11]。其中,蠕動運動的推進方式研究較為廣泛。然而,目前大多數(shù)基于蠕動的機器人系統(tǒng),存在以下2個問題:①結(jié)腸內(nèi)部是一個受限的三維空間,關(guān)于結(jié)腸鏡模型的運動規(guī)劃方面的研究非常少[12];② 結(jié)腸內(nèi)壁表面光滑,在探索結(jié)腸時常表現(xiàn)出較低的運動效率。
針對這些問題,本文提出了一種新型可彎曲結(jié)腸鏡末端結(jié)構(gòu)設計,在相隔120°的方向上各布置一個氣動腔室,以實現(xiàn)各個方向的彎曲;再對該軟體機器人在輸入氣壓作用下的末端部位置進行分析,利用幾何方法建立了其運動學模型,可為軟體機器人控制規(guī)律的設計與路徑規(guī)劃提供控制模型;最后進行三維仿真模擬結(jié)腸鏡軟體機器人彎曲動作,并搭建實驗平臺進行驗證。
1 結(jié)腸鏡機器人末端部結(jié)構(gòu)設計
在設計結(jié)腸鏡機器人末端時,應著重考慮2個方面。第一個方面,此結(jié)構(gòu)應該有足夠的剛度來支撐機器人的運動;第二個方面,結(jié)構(gòu)應具有良好的抗彎性能[13]。考慮到這些問題,本文提出了一種三腔驅(qū)動末端,它是一個可獨立運動的單元,內(nèi)置3個間隔120°的腔體。頂端橫截面外徑為16 mm,小于結(jié)腸的平均直徑。內(nèi)孔直徑為5 mm,用于放置相機等其他照明工具,橫截面結(jié)構(gòu)如圖1所示。每個氣室的內(nèi)部壓力可以使用氣動伺服閥獨立控制。
2 結(jié)腸鏡機器人末端部的運動學分析
為了控制機器人末端部的形狀,了解機器人頂端的位置與其控制輸入之間的關(guān)系是必要的。本文在幾何學分析與常曲率運動學的基礎上建立其運動學模型,常曲率運動學優(yōu)點在于將運動學轉(zhuǎn)換分解成2個獨立的映射:一個從執(zhí)行器空間到配置空間;另一個從配置空間到任務空間。前者依賴于機器人的實際結(jié)構(gòu)設計,后者則適用于所有符合常曲率假設的設計[14]。當結(jié)腸鏡機器人受力時,會向某個方向彎曲,可以將其中心線與腔室中心線看作若干段常曲率圓弧[15],用φ表示其彎曲的角度,Φ表示其彎曲方向。其中,A所在陰影表面為軟體機器人的上表面,A面與XY平面的夾角為φ,機器人彎曲運動參數(shù)如圖2、3所示,其參數(shù)含義見表1。

表1 參數(shù)含義
當負載影響被忽略并且偏轉(zhuǎn)角度φ處于0<φ<π時,處于彎曲狀態(tài)的的軟體機器人的形狀可被假定為一個圓弧。鑒于這一假設,顯然
結(jié)腸鏡機器人中心線在底面上的投影與Y軸負方向夾角為Φ,底面與上端面A的相交線為l,則底面腔室圓心到相交線l的距離為Ri,如圖2所示。則各腔室中心線相對于彎曲平面的角度為:
利用這些角度,可以將腔室i的曲率半徑描述為:
并結(jié)合方程(3)(4)可推導出方向角:
同時,中心線的曲率半徑和彎曲角φ可表示為:
利用上文確定的運動模型,各腔在壓力變化下的對應長度可以表示為:
因此,可將機器人形狀參數(shù)與輸入壓力的正運動學方程表示為:
在假定機器人的彎曲形狀為圓弧的前提下,通過圓柱坐標變換,可得到機器人在任務空間中末端與機器人彎曲參數(shù)相關(guān)的笛卡爾坐標(x,y,z)
由此可給出該模型的狀態(tài)空間:
其中X=(φ,φ,L)T,QP=(P1,P2,P3)T。
3 三維模型與仿真
3.1 模型選擇
有限元法廣泛地運用于物體的應力、應變分析,模擬物體的物理行為等領(lǐng)域。然而在進行大變形柔性體模擬仿真時,描述應變與位移之間的幾何關(guān)系發(fā)生了變化,因此有限元法在對軟體機器人建模仿真中存在著諸多不便。
本次仿真選用專門用于模擬大變形柔性材料的軟件包VoxCAD。VoxCAD與傳統(tǒng)有限元軟件的主要區(qū)別在于其使用的是質(zhì)點-彈簧法模型,基于“歐拉-伯努利梁理論”,將對象分解為由梁單元所連接的立方體單元,如圖4所示,每個立方體單元儲存有質(zhì)量和轉(zhuǎn)動慣量;梁單元則儲存有平移和轉(zhuǎn)動剛度[16],不僅能夠計算拉伸壓縮,還將所有軸的橫向剪切和旋轉(zhuǎn)考慮進去。
3.2 建立質(zhì)點-彈簧模型
首先建立一個16×16×110的工作區(qū)域,共計28 160個體素。材料模型視作線性材料,具有各向同性,各材料屬性由查詢相關(guān)資料填入,有關(guān)參數(shù)如表2所示。其中,深色體素直接受力,淺色材料不直接受外力,在相鄰體素的彈簧力作用下位置發(fā)生相應改變,最終建立一個具有3個腔體的空心圓柱體,如圖5所示。
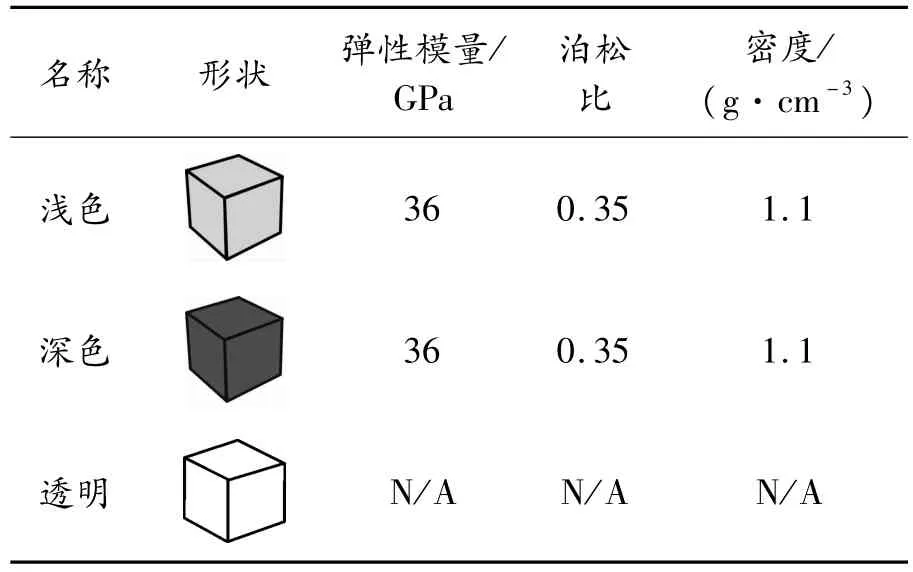
表2 材料參數(shù)
3.3 物理仿真
對氣動軟體機器人彎曲的過程進行仿真,為簡化計算,假定軟體機器人只有單側(cè)腔體處于充氣狀態(tài),因而軟體機器人會因徑向不平衡力發(fā)生彎曲。為此,將三維模型底面固定,即底面所有體素自由度為0。腔體內(nèi)壁體素(所有深色單元)受到垂直于空腔內(nèi)表面的壓力,環(huán)境設置中引入重力。模型變形的運動如圖5、6所示,在0.7 MPa的壓力下,模型最大伸長量為30.7 mm,伸長量與到底面的距離成正相關(guān)。充氣腔室在壓力下向外膨脹,壓力大小與到充氣腔室的距離成負相關(guān),仿真變形結(jié)果如圖6、7所示。仿真模型與運動學模型的數(shù)據(jù)分析將在4.2節(jié)中給出。
4 實物驗證
4.1 實驗平臺的搭建
為驗證三維仿真與運動學模型的有效性,需搭建實驗平臺用以測試。本次實驗通過控制氣動回路內(nèi)部的氣壓來實現(xiàn)軟體機器人的運動,可分為兩大部分:控制回路與氣動回路。實驗平臺系統(tǒng)實物如圖8所示。
控制回路:上位機編寫程序上傳至Arduino板卡,Arduino板卡輸出開關(guān)信號至繼電器,由繼電器輸出12 V電壓控制電磁閥開閉,從而控制軟體機器人的3個并聯(lián)氣體腔室的通氣與否。Arduino板卡輸出PWM信號,經(jīng)過電壓轉(zhuǎn)換模塊轉(zhuǎn)變?yōu)?~12 V的電壓控制電氣比例閥,比例閥可輸出對應氣壓來達到控制軟體機器人運動的效果。
氣動回路:氣體從空氣壓縮機進入氣動三聯(lián)件,先經(jīng)過調(diào)速閥以調(diào)節(jié)流速大小,再經(jīng)過電氣比例閥調(diào)節(jié)出口壓力,最終得到滿足實驗所需的氣體接入3個3位五通電磁換向閥,每個電磁閥各自與一個腔室相連,由換向閥控制軟體機器人空腔的進氣與放氣。
4.2 實驗結(jié)果的分析
在壓力范圍0~0.12 MPa的條件下進行實驗,每隔0.03 MPa記錄一次氣壓與末端位置,共5個位置。為了更為直觀地對比理論位置與實際位置的差異,可以用5個離散點得到一個連續(xù)曲線用以比對,由于實驗采集離散點較少,且目標曲線的部分自變量對應2個應變量,因此無法用初等函數(shù)將曲線標書出來,故放棄使用函數(shù)來擬合或逼近,選用多項式樣條插值法。本文通過Matlab三次樣條插值得到其樣條曲線[17]。
實驗樣機運動軌跡如圖9所示,各模型末端軌跡如圖10所示。圖中樣條曲線穿過5個離散點經(jīng)樣條插值法所得,理論曲線為第2節(jié)中的運動學模型在0~0.12 MPa下所得機器人末端坐標的樣條曲線,仿真曲線為VoxCAD中模型在壓力范圍0~0.12 MPa下的末端運動軌跡。
如圖10所示,在壓力范圍0~0.03 MPa下,實驗樣機曲線、運動學模型曲線基本相同;在氣壓逐漸增大后,樣機位置漸漸偏離理論位置,但趨勢大致相同。造成上述誤差的主要原因有:軟體機器人材料并非均質(zhì)材料,液態(tài)硅橡膠攪拌過程中難以做到絕對均勻,且在凝固過程中不均勻部分與雜質(zhì)部分會在重力作用下發(fā)生沉淀,進一步導致材料的密度不均。因此,軟體機器人的運動誤差會隨著氣壓的增大而累積。另外,實物模型充氣腔室的位置誤差也會對其運動結(jié)果造成影響。
質(zhì)點-彈簧模型曲線與運動學模型曲線大致吻合,這進一步驗證了理論的正確性。但誤差仍然存在,且有著隨壓力增大而增大的趨勢,主要原因在于等曲率模型僅從運動學層面進行研究,在實驗樣機與三維模型中,會引入重力、彈性變形力等動力學因素,其軸線并不嚴格符合弧線的假設[18]。
5 結(jié)論
本文中設計了一種新型的可彎曲結(jié)腸鏡機器人,末端的外徑為16 mm,小于結(jié)腸的平均直徑(20 mm),建立了運動學模型,利用彈簧-質(zhì)點法建立了三維模型并進行可視化仿真,驗證了運動學模型的正確性。提出了新的方法對軟體機器人進行可視化仿真,展示了軟體機器人末端在單腔驅(qū)動情況下的運動結(jié)果,解決了以往大變形柔性體難以仿真的問題。
軟體機器人具有良好的柔性與適應性,十分適用于醫(yī)學診斷檢測、勘探偵查等領(lǐng)域。軟體機器人建模與控制方法關(guān)乎其形狀控制精度,目前分段常曲率法是軟體機器人運動學建模領(lǐng)域最常用的方法,但此方法僅從運動學層面進行研究,沒有考慮彈性變形力、重力等動力學因素的影響,無法應用到結(jié)構(gòu)形狀更加復雜的軟體機器人建模,還存在較大改進空間。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數(shù)學備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數(shù)學備考)(2020年9期)2021-01-04 00:25:14
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19