多UAV編隊飛行控制技術
2021-01-22 10:33:45錢騭寰,徐英武
今日自動化 2021年12期
關鍵詞:控制技術
錢騭寰,徐英武

[摘? ? 要]無人機作為一種有效的偵察、作戰工具,近年來被各個國家廣泛運用于軍事和民用領域。信息化時代的到來使得戰場環境也日趨復雜,單無人機探測范圍有限、載荷小等問題也逐漸暴露,為更好的應對各類高難度任務類型,越來越多的學者將目光聚焦于多無人機編隊的研究上,多無人機編隊擁有更好的任務擴展能力與戰場生存概率,故本文旨在研究一種多機編隊飛行控制,并完成仿真驗證。
[關鍵詞]多UAV;編隊飛行;控制技術
[中圖分類號]S252 [文獻標志碼]A [文章編號]2095–6487(2021)12–00–02
Multi-UAV Formation Flight Control Technology
Qian Zhi-huan,Xu Ying-wu
[Abstract]As an effective reconnaissance and combat tool, UAV has been widely used in military and civilian fields by various countries in recent years. With the advent of the information age, the battlefield environment is becoming more and more complex, and problems such as the limited detection range and small load of a single drone are gradually exposed. In order to better cope with various types of difficult tasks, more and more scholars are focusing on In the research of multi-UAV formations, multi-UAV formations have better mission expansion capabilities and battlefield survival probability. Therefore, this article aims to study a multi-aircraft formation flight control and complete simulation verification.
[Keywords]multiple UAV; formation flying; control technology
1 研究背景
無人機編隊飛行(coordinated formation flight,CFF)就是把多架具有自主功能的UAV按照一定的結構形式進行三維空間的排列,讓其在飛行過程中能保持穩定的所需隊形,并且能夠根據外部的不同情況以及任務需求進行實時動態調整,從而提升無人機的作戰能力,實現整個機群的協同一致性的過程。早在20世紀70年代,NASA就針對無人機的編隊飛行進行了大量的風洞、仿真試驗,分析了編隊間距、數量等因素對單體無人機的氣動特性的影響。2004年,波音公司用兩架X-45無人機驗證了雙機編隊飛行,并第一次模擬了雙無人機協作攻擊任務,開創了無人機編隊實機飛行的先河。2012年德萊登分型研究中心用兩架改裝過的RQ-4全球鷹,在13 000 m的高空以緊密編隊的形式完成了空中加油,將全球鷹的飛行時長延伸到160 h,大大提高了該機的作戰半徑與空中停留時間。2017年中國的“彩虹3”無人機編隊亮相巴基斯坦國慶閱兵式,成了首次參加閱兵的現役無人機編隊。
編隊隊形保持是多無人機編隊飛行的重點與核心,常用的隊形控制方法有Leader-follow法、虛擬結構法等。
1.1 Leader-follower法
Leader-follower法最早由Desai在1988年提出,其基本思想是指定一架無人機為長機,其余為僚機。在執行任務時,長機負責航跡跟蹤,僚機的任務是保持與長機及鄰機的相對位置保持不變。該方法原理簡單,是最常用的一種編隊方式。這種方式簡化了編隊系統的控制且易于編隊拓撲與工程實現。但不足之處在于一旦長機被破壞,整個編隊任務就會失敗。此外,如果編隊采用鏈式結構,誤差會在層級間累計疊加,當編隊受到較大擾動時,會導致僚機編隊失敗。
1.2 虛擬結構法
虛擬結構法是指選取虛擬點作為長機位置,并通過控制每一架無人機與虛擬點的相對位置實現編隊的整體控制。該方法通過設置一個具有運動參數的虛擬長機來模擬實際飛機的飛行行為,編隊中所有無人機的位置都由虛擬長機點實時解算給出,因此這種方法很好地避免了長機缺失而引起的編隊難以保持的缺陷,但由于整個編隊需要傳遞和共享大量狀態信息,因此對通信質量提出了很高要求。
2 模型建立
2.1 編隊數學模型建立
通過上文對不同編隊控制策略的分析對比,本文選取“Leader-follower”這種易于工程應用的編隊控制策略來對無人機編隊飛行控制系統進行研究,各僚機通過實時計算當前位置與長機當前的位置間距確定自身的位置,并通過實時跟蹤間距指令實現隊形的保持。根據兩架編隊無人機的相對運動關系,首先考慮平面上的橫縱向編隊距離與偏航角的關系,x、o、y為地面坐標系,選取固連于僚機的氣流坐標系作為編隊參考坐標系來對兩機間的相對運動關系進行建模描述,定義長機相對于僚機的坐標為。
由無人機的相對運動關系可以看出,對于長機和僚機分別有:
(1)
其中,i=L,W;Xi,Yi分別表示長機或僚機在慣性系中的位置坐標,依據三角幾何關系,可以得到長機在慣性系中的位置坐標,如式(2)所示:
(2)
對二式兩邊同時求導可得式(3):
(3)
將式(1)帶入式(3)可得到式(4)與式(5):
(4)
(5)
將式(4)左右兩邊同時乘以,式(5)左右兩邊同時乘以,將兩式相加,可得式(6):
(6)
同樣,將式(4)左右兩邊同時乘以-,式(5)左右兩邊同時乘以,最后得到的兩個式子相加可得式(7):
(7)
高度方向的相對運動可以看作長機和僚機的高度差Zw=ZL-ZW,故可將上述狀態方程整理為飛機的編隊運動雪模型如式(8)所示:
(8)
通過對一架僚機與一架長機的相對運動關系進行分析,就可以得到兩架無人機在編隊飛行過程中的數學模型,并且這個模型具有很好的可拓展性,可以拓展到任意數量的無人機編隊飛行中。
2.2 編隊保持控制系統設計
編隊飛行過程中長機的飛行航跡由飛行計劃提供,長機獨立飛行不受僚機影響,與單架無人機控制方法相同,長機可以根據飛行計劃,提取航段,將航段劃分為直線和圓弧段進行跟蹤。在側向,無人機將當前的位置與所設定航線的側偏距離計算偏差,再把偏差作為制導指令輸入飛行控制系統中,實時解算無人機副翼以及方向舵舵偏角,再通過無人機的滾轉動作改變飛行方向,產生側向速度,消除側偏;在縱向通道,無人先解算自身位置與當前高度的偏差,解算升降舵的舵偏操縱量,進行高度的調整;在速度通道,通過與期望航線理想速度做差,獲取速度偏差,通過調整油門的開度,實現跟蹤航線飛行。
僚機在編隊飛行過程中,受到長機與周圍僚機的影響,為了自主協同與長機形成編隊,僚機首先根據長機的位置與隊形要求實時計算出理想的編隊位置坐標,在此基礎上,為了消除僚機編隊的前向、側向以及高度3個方向上的位置誤差并且能快速跟蹤長機機動,設計了具有線性混合器的三通道編隊保持控制系統,分別為速度通道、航向通道和高度3個通道。根據編隊飛行控制系統整體架構,線性混合器通過相對運動學方程結合隊形任務目標生成僚機三通道控制指令。
以速度通道為例,描述僚機的控制器結構,線性混合器是長機與僚機i的水平速度誤差和x方向上的期望位置誤差的線性組合,為僚機的油門輸出一個虛擬控制指令,如式(9)所示:
(9)
式中:kvi,kxi分別為前向偏差與兩機前向速度偏差的反饋系數。xdi為兩機在編隊坐標系下的x方向期望相對位置,由期望編隊隊形給出。將線性混合器的輸出作為僚機油門通道的輸入,得到僚機的速度控制器結構如式(10)所示:
(10)
3 仿真試驗
本文旨在完成一個三機編隊的飛行仿真,模擬實際飛行中三機編隊做定滾轉角盤旋運動,以5°滾轉角的飛行模態為例,結合各機的狀態參數,分析編隊飛行的效果。
編隊飛行各無人機的初始狀態,見表1。
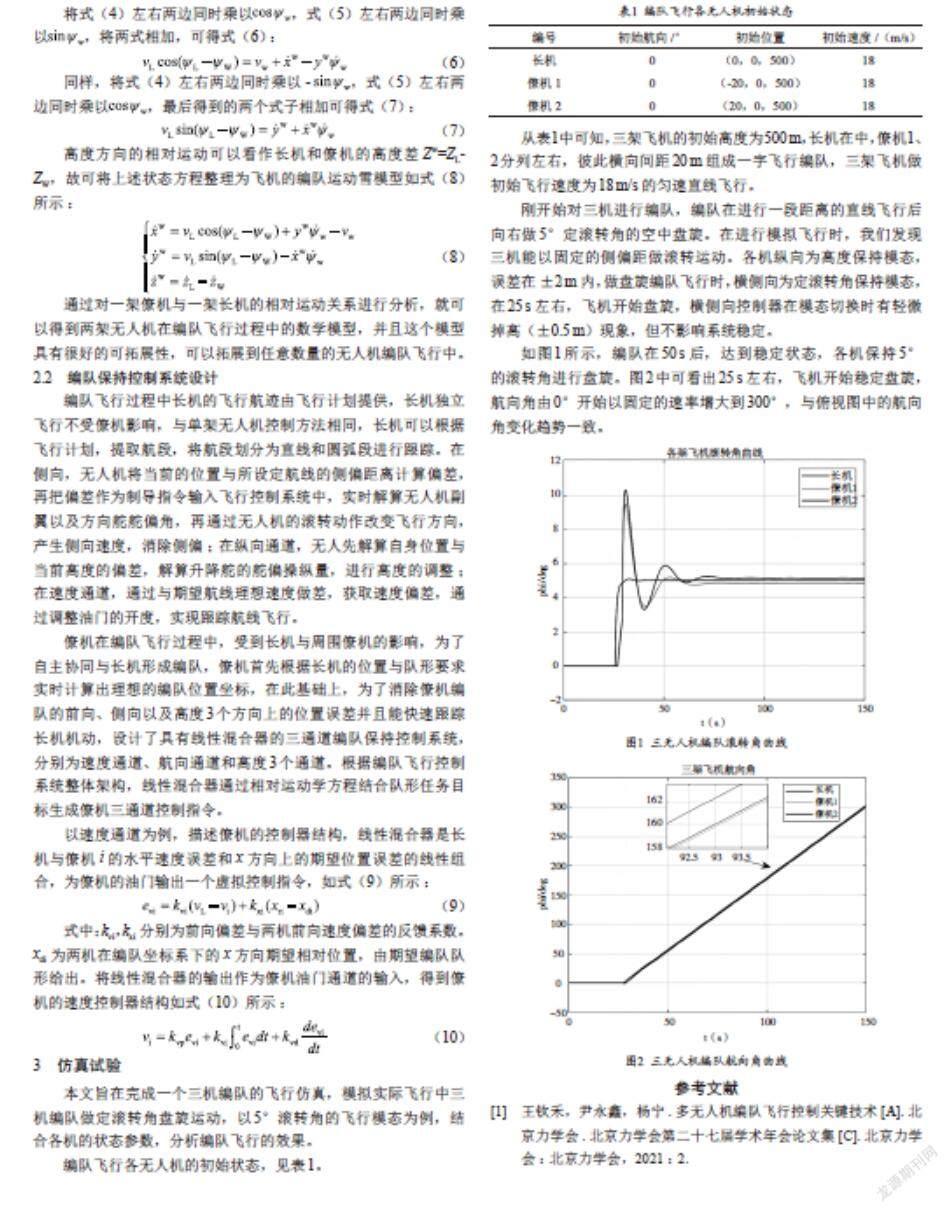
從表1中可知,三架飛機的初始高度為500 m,長機在中,僚機1、2分列左右,彼此橫向間距20 m組成一字飛行編隊,三架飛機做初始飛行速度為18 m/s的勻速直線飛行。
剛開始對三機進行編隊,編隊在進行一段距離的直線飛行后向右做5°定滾轉角的空中盤旋。在進行模擬飛行時,我們發現三機能以固定的側偏距做滾轉運動。各機縱向為高度保持模態,誤差在±2 m內,做盤旋編隊飛行時,橫側向為定滾轉角保持模態,在25 s左右,飛機開始盤旋,橫側向控制器在模態切換時有輕微掉高(±0.5 m)現象,但不影響系統穩定。
如圖1所示,編隊在50 s后,達到穩定狀態,各機保持5°的滾轉角進行盤旋。圖2中可看出25 s左右,飛機開始穩定盤旋,航向角由0°開始以固定的速率增大到300°,與俯視圖中的航向角變化趨勢一致。
參考文獻
[1] 王欽禾,尹永鑫,楊寧.多無人機編隊飛行控制關鍵技術[A].北京力學會.北京力學會第二十七屆學術年會論文集[C].北京力學會:北京力學會,2021:2.
猜你喜歡
機電安全(2022年1期)2022-08-27 02:15:16
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2019年7期)2019-04-25 13:16:50
電子測試(2018年14期)2018-09-26 06:04:44
上海大中型電機(2017年4期)2017-02-06 05:27:06
山東工業技術(2016年15期)2016-12-01 05:30:51
照明工程學報(2016年3期)2016-06-01 12:17:56
水電站機電技術(2014年4期)2014-10-13 08:30:07
水電站機電技術(2014年1期)2014-09-26 11:59:46
導航定位與授時(2014年2期)2014-04-27 13:41:08
