助老型機械外骨骼的初步設計
2021-01-22 10:33:45胡志廣,吳楠
今日自動化 2021年12期
關鍵詞:結構設計
胡志廣,吳楠

[摘? ? 要]目前,隨著我國人口老齡化的問題使得人們對幫助老年人的生活起居有著迫切的需求。本文針對未來老齡化的現象提出助老型機械外骨骼的初步設計方案,以幫助正常但行走困難的老年人助力順暢行走。本文設計的助老型機械外骨骼不同于軍事或工業機械外骨骼,它具有質量輕,體積小,價格親民并且穿戴方便的優點。本文通過探究初步設計機械外骨骼機構、工作方式以及材料,并通過分析已有的典型模型加以創新最終形成助老型機械外骨骼的初步設計方案。
[關鍵詞]機械外骨骼;助老;研究現狀;結構設計
[中圖分類號]TP242 [文獻標志碼]A [文章編號]2095–6487(2021)12–00–03
Preliminary Design of the Old-Aid Mechanical Exoskeleton
Hu Zhi-guang,Wu Nan
[Abstract]Nowadays, with the aging of our country's population, people have an urgent need to help the elderly in their daily lives. This article proposes a preliminary design plan for the elderly-assisting mechanical exoskeleton in view of the phenomenon of aging in the future, to help the elderly who are normal but have difficulty walking to help smooth walking. The mechanical exoskeleton designed in this paper is different from military or industrial mechanical exoskeleton. It has the advantages of light weight, small size, affordable price and convenient wear. This paper explores the preliminary design of mechanical exoskeleton mechanisms, working methods and materials, and analyzes existing typical models to innovate and finally forms a preliminary design plan for the old-fashioned mechanical exoskeleton.
[Keywords]Mechanical Exoskeleton; Helping the Elderly; Research Status; Structural Design
根據國家統計局最新在國新辦發布會上發布的第七次全國人口普查關鍵數據,我國人口2021年的老年人數相對于2020年上升了5.44 %,而相對的青少年乃至成年人的人口總數下降了6.79 %。因此,逐年增加的老年群體對養老、醫療、社會服務等方面需求越來越大,老年人體能下降并且容易生病,醫療衛生消費支出壓力也越來越大。基于以上問題,如果有一款穿戴設備可以幫助老年人日趨下降的體能,會很大程度地給老年人帶來幸福,也會給老年人的家人帶來放心。
1 機械外骨骼研究現狀
人體機械外骨骼最早研發于20世紀60年代末用于軍事領域,用來增加士兵的負荷能力,隨著社會的發展逐步進入民用領域、醫療康復領域和工業生產領域。
1.1 國外外骨骼研究現狀
目前,美國在外骨骼軍事化領域方面較為領先,俄羅斯、法國、德國等國也在進行積極地研發。而在民用領域,美國、日本、以色列、韓國等都具有較強的研發能力,也具有顯著的研究成果及實際應用成果。其中較為有代表性的企業有美國EKSO公司、日本Cyberdyne公司、美國SuitX公司、以色列ReWalk Robotics公司、美國Parker Hannifin公司、韓國現代公司等。美國SuitX公司與加州大學伯克利分校的機器人及人體工程學研究室進行合作,并于2016年研發推出輕量級可負重外骨骼系統SuitX Phoenix,主要為脊髓病人服務,可以幫助行走障礙的人獨立站立并行走,售價4萬美元,電池續航約8 h。SuitX公司隨后還推出MAX系統,主要幫助工人承受作業時的重負荷,已有碼頭、建筑工地、倉庫、甚至飛機制造商波音公司成為其客戶,其MAX系統的三個模塊BackX 、ShoulderX和LegX的售價分別是3 000美元、3 000美元和5 000美元,如圖1、圖2所示。
1.2 國內外骨骼研究現狀
我國對機械外骨骼的研究起步較晚,但在軍事與醫療領域的研究也比較突出,國家自然科學基金863計劃和科技支撐計劃等都已經開始著重關注這方面的研究。例如,浙江大學研究的可穿戴式下肢輔助行走外骨骼機構、基于肌電信號控制的康復醫療下肢外骨骼、懸掛式下肢協助康復外骨骼、踝關節外骨骼原型系統等;哈爾濱工業大學的外骨骼研究針對上肢和下肢的康復訓練;海軍航空院已研制出有動力驅動的外骨骼助力腿樣機;電子科技大學研制的基于電機驅動和液壓驅動的助力型外骨骼系統能實現行走、轉體、下蹲等動作,并通過多通道智能人機交互技術和分布式實時控制技術大幅提升樣機性能的穩定和可靠性;中科院也已研制出一種下肢外骨骼機器人,在單條機械腿上配置了6個自由度(機械髖關節3個,機械膝關節1個,機械踝關節1個,足底1個);清華大學、陸軍第二炮兵學院、中科院合肥智能研究所、東南大學、南京理工大學、上海大學、東南大學、中國科學技術大學等科研單位都已經涉入外骨骼技術的研究。
2 機械外骨骼結構初步設計
2.1 設計要求
下肢助行外骨骼機器人需要與穿戴者緊密結合能夠隨身體運動,并且為下肢各個關節提供助力的一體化設備。
(1)安全性。最基本的要求就是保證穿戴者的安全,因此需要采用具有一定強度的且輕便的材料來保證安全性。
(2)適應性。由于不同人的腰圍和腿的長度等參數各有差異,所以設計的外骨骼需要可以根據不同人的身體特征調節自身尺寸,確保在使用的過程中不會出現不匹配的情況;為了增強外骨骼穿戴的舒適程度,還需要外骨骼具備一定仿生性。
(3)合理性。外骨骼作為助力的主要來源不僅需要輸出足夠大的扭矩,還要具有質量小,節奏緊湊,體積輕便于攜帶和拆卸的特點。所以選擇外骨骼驅動方式是設計關鍵。
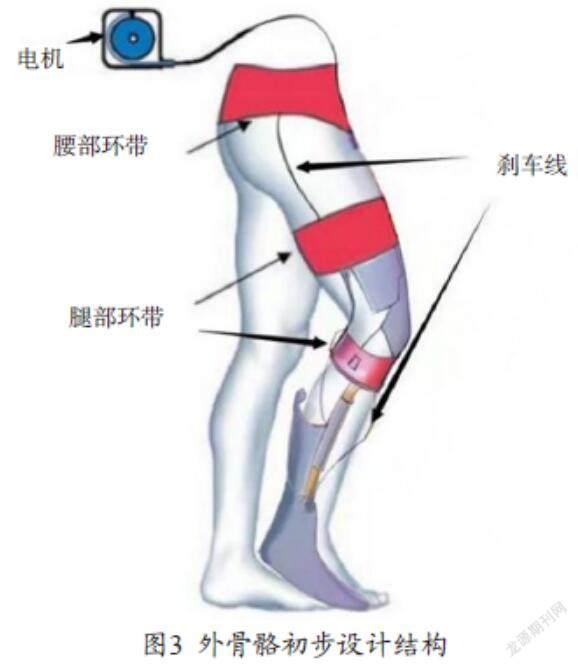
2.2 結構初步設計
采用電機、帶輪、剎車線作為主要結構,如圖3所示。
2.3 步態分析
以下步態階段劃分過程中右腿腳后跟剛開始接觸作為初始時刻進行分析;
第一階段:觸地開端,表示右腳后跟向前揮動至與地面接觸的時刻,可以被定義為步態周期的起始階段。
第二階段:體重傳遞,表示右腳腳掌和地面的接觸面積慢慢增大,直到右腳腳尖即將離開地面開始擺動的狀態過程,此時身體重心逐漸從左側下肢轉移到右側下肢。
第三階段:支撐中期,左腳離開地面,開始向前揮動,將從后向前超越右腿位置直至左側小腿與地面垂直,此時身體重心將從后傾狀態轉換為前傾狀態。
第四階段:支撐末期,左腿繼續揮動,直到腳后跟接觸地面,該時期身體軀干隨著左腿向前傾斜。
第五階段:擺腿準備,左腿腿掌逐漸與地面完全接觸,直到右腿腳后跟抬起,只剩下腳尖接觸地面。
第六階段:擺腿開端,該階段右腿開始揮動,從離開地面揮動至左腿靠攏。
第七階段:擺腿中期,右腿將從靠近左腿位置揮動至右側小腿與地面垂直。
第八階段:擺腿末期,右腿將從小腿與地面垂直位置揮動至腳后跟,再次與地面接觸,完成一個步態周期。
2.4 工作邏輯
外骨骼整理由電機啟動,由電機帶動帶輪使剎車線做收縮和延伸的動作,大腿和小腿分別用兩根剎車線所固定,當邁步時電機通過帶輪使大腿端剎車線進行收縮,同時帶動小腿剎車線收縮完成抬腿動作,此時另一條腿固定不動,當檢測到抬起的腳完全落在地面上時,另一條腿開始運轉,如此往復實現行走的運動。
3 機械外骨骼驅動方式分析
目前我國穿戴式外骨骼機器人驅動器結構主要有電機、氣壓、液壓等。氣壓驅動通過大氣直接獲得,處理方便,不會對環境造成污染,使用操作也相對安全,便于實現過載保護,但目前氣動系統壓力不高,所以輸出壓力不會很大,而且傳動效率比較低,排氣噪聲較大。液壓驅動雖然具有較為廣泛的應用,能夠輕易實現自動化借助各種控制閥特別是液壓控制和電氣控制結合使用時,能容易地實現復雜的工作循環,而且可以實現遙控,但液壓系統中的漏油等因素影響運動的平穩性和正確性,使得液壓傳動不能保證嚴格的傳動比,而對油溫變化比較敏感。溫度變化使液體黏性發生變化,使得工作的穩定性受到影響,所以不宜在溫度變化很大的地域穿戴,液壓驅動要求有獨立的能源不能像電源那樣方便。電機結構簡單,便于拆卸,運動精度高,沒有煙塵,無氣味,不污染環境,噪聲小。耗能低工作效率能達到95 %以上。后期維護方便,雖然大推力的電機驅動成本較高,但用于助老外骨骼機械是絕佳選擇,因此電機是應用最為廣泛的外骨骼驅動器。
4 驅動電機及剎車線型號選擇
在電機的選用采取通過對步進電機和伺服電機進行比較,探究最適合可穿戴外骨骼的驅動裝置。步進電機的輸出力矩隨轉速升高而下降,并且會在較高轉速時急劇下降,所以其最高工作轉速一般在300~600 r/min,而交流伺服電機為恒力矩輸出,轉速一般為2 000~3 000 r/min,兩者都能輸出額定轉矩,在額定轉速以上為恒功率輸出。步進電機在低速時易出現低頻振動的現象,振動頻率與負載和驅動器有關,這種步進電機的工作原理所造成的低頻振動現象對機器正常運轉很不利。交流伺服電機運轉非常平穩,即使在低速時也不會出現振動現象,交流伺服系統具有共振抑制功能,也便于調整。通過探究步進電機和伺服電機的過載能力雖然步進電機沒有伺服電機那么有過大的過載能力,不過在人體穿戴的助老機械外骨骼裝備不需要那么大的力矩,避免出現力矩浪費的現象。
步進電機停轉時具有最大的轉矩(當繞組激磁時),而且精度在3 %~5 %,不會將一步的誤差積累到下一步。因而有較好的位置精度和運動的重復性,同時步進電機具有優秀的啟停和反轉相應,將負載直接連接到電機的轉軸上也可以極低速的同步旋轉,但由于速度正比于脈沖頻率,因而有比較寬的轉速范圍。伺服電機無電刷和換向器,因此工作可靠,對維護和保養要求低。而且定子繞組散熱比較方便,慣量小,易于提高系統的快速性也適用于高速大力矩工作狀態。不過伺服電機在運作時會出現電刷磨損的粉末,無法在干凈的環境下使用,電刷有消耗還需要保養。
由于伺服電機及其驅動器的制造成本和技術含量相對較高,因此價格也比步進電機高了不少,尤其是伺服電機價格差距更大。近年來國產伺服電機發展很快,有了不少品種的伺服電機可供選擇,性價比也較高。交流伺服系統在許多性能方面都優于步進電機。但在一些要求不高的工作場景也經常用步進電機來做執行電機。步進電機可能會成為主要的助老型機械外骨骼驅動電機。
剎車線的選用,采取市場普遍的剎車線即可。禧瑪諾,佳威的尊爵都是不錯的選擇。
5 結束語
隨著我國老齡化進程的加快和肢體殘障人員數量增多,機械外骨骼能夠幫助人們提高生活質量這一明顯優勢顯示出巨大的應用前景,相關研究也在不斷深入。相信在不久的將來,機械外骨骼在推動人類社會進步、幫助人們節省體力、改善生活品質等方面會起到相當重要的作用。本文對助老型機械外骨骼的機構進行了初步的設計,但是還不夠完善,期待后期盡快完善設計并市場化,盡快地給老年人帶來方便和幸福。
參考文獻
[1] 趙新剛,談曉偉,張弼. 柔性下肢外骨骼機器人研究進展及關鍵技術分析[J].機器人, 2020,42(3):365-384.
[2] 歐陽小平,范伯騫,丁碩.助力型下肢外骨骼機器人現狀及展望[J].科技導報,2015,33(23):92-99.
猜你喜歡
建材發展導向(2023年6期)2023-03-31 02:51:38
建材發展導向(2022年6期)2022-04-18 08:17:26
建材發展導向(2021年11期)2021-07-28 06:57:42
建材發展導向(2021年7期)2021-07-16 07:07:28
防爆電機(2020年4期)2020-12-14 03:11:14
中國核電(2017年1期)2017-05-17 06:10:04
電子制作(2016年1期)2016-11-07 08:43:05
專用汽車(2016年5期)2016-03-01 04:14:49
專用汽車(2016年5期)2016-03-01 04:14:48
中國房地產業(2016年2期)2016-03-01 01:25:23
