配電網電能質量治理設備協調控制研究
2021-01-24 14:27:34王昕揚
科技創新與應用 2021年4期
王昕揚
(上海電力大學,上海 201306)
引言
隨著電動汽車技術的改進,對于電能質量的要求向多元化和差異化發展,電能質量問題的復雜性也因此增加。為了滿足用戶電能質量的需求,往往采用多種電能質量治理裝置綜合治理配電網電能質量[1-2]。
隨著各類電能質量治理裝置的接入,由于各電能質量調節裝置種類不同,響應速度不同,各裝置之間的調控目標可能會相互影響,從而使動態性能下降。因此,需要采用主動的控制手段協調各個設備的輸出和動作,以防止電能質量調制效果不佳[3]。
為了避免配電網中各電能質量治理設備相互干擾,文中綜合考慮解決配電網諧波畸變和高低電壓等常見電能質量問題,依據電網參數和配電網運行情況,基于基波和諧波潮流計算各控制節點對被控節點的諧波靈敏度和電壓-無功靈敏度,以各APF 和SVG 為中心劃分其影響區域,以區域內被控節點為目標,針對性計算各控制節點的協調系數,從而實現APF 和SVG 的協調運行。
1 電能質量治理裝置的控制策略分析
按照電能質量擾動現象的特征,電能質量問題被分成連續型和事件型兩類。連續型是指在較長的時間范圍內持續的不在正常狀況的現象,主要包括電壓偏差、頻率偏差、三相電壓不平衡、電網諧波、電壓波動和閃變等[4-5],是文中主要考慮的電能質量問題。處理這類問題的電能質量治理設備主要有APF 和SVG。
1.1 多 APF 裝置并聯
對于多臺APF 的并聯,共用電流互感器檢測負載電流。

式中,ici為各臺APF 輸出電流,iLh為負載電流中的諧波成分,iL1為負載電流中的基波成分。
設若每臺APF 輸出電流都能完美跟蹤指令電流,即

式中,SAPFi為各臺 APF 額定容量,SAPF為總額定容量。
由上述可知,給每個APF 按容量比重分派任務。若有APF 故障或加入新的APF,只要即時更換均流系數即可。
將各臺APF 的均流系數傳遞給各APF 模塊,則有指令電流為上文所述彌補直流電壓有功損耗的有功電流)。該方法擴展能力強,系統維護替換方便,較集中控制更為方便,可以滿足不同的容量需求[6]。
1.2 APF 和SVG 裝置的協調運行
根據上述APF 的并聯運行,可在APF 和SVG 的控制器中的指令生成模塊增加一個協調系數KD,可以通過協調系數KD進一步協調分配各APF 和SVG 的輸出諧波和無功。該系數的大小取決于各控制節點對被控節點的靈敏度指標,從而使各APF 和SVG 在全局進行協調運行。
2 靈敏度指標
在配電網具有諧波源的情況下,將生成基波潮流和各次諧波潮流。諧波潮流是經由非線性負荷的基波潮流變換而成的,在所有潮流中占比很小,且與基波潮流相互耦合。諧波潮流的改變會影響基波功率,而基波潮流的變化對諧波潮流的作用更大。
諧波潮流等式約束如下[7]:

在計算基波潮流時由于諧波的作用,主要為對各節點產生的k 次諧波功率,即

式中 Pi、Qi為節點 i 總有功及無功功率為節點i 的基波有功及無功功率為節點 i 的 k 次諧波有功及無功功率。
基于諧波電壓對諧波電流的作用,諧波源的注入電流可以根據節點基波電壓和諧波源特性得到:

由于諧波參數基本不變,各諧波源節點的諧波電流與節點基波電壓幅值成比例,當節點基波電壓變化時,各諧波源節點的諧波電流也相應改變。由此可以通過上述公式(3.2)和(3.3)表現基波與諧波的相互作用。
配電網中的無功主要與各節點電壓大小有關,且J矩陣中的各元素很小,可簡化得:

將系數L 轉換為節點導納矩陣的形式:

B 為配電網的導納陣[8]。
定義任一被控節點i 的節點電壓Ui對SVG 控制節點j 處輸出無功功率Qj的電壓-無功靈敏度:

由電壓-無功靈敏度可以大致得到SVG 注入無功電流時,各節點基波電壓的變化情況。
由式(3.1),任一節點i 的h 次諧波電壓對控制節點j處h 次諧波注入電流的諧波靈敏度為

則由諧波靈敏度可知,當APF 注入諧波電流時,各節點諧波電壓的情況。
3 控制策略設計
配電網電能質量設備的協調控制,主要由監控主站,區域協調控制器和本地控制器構成,具體過程如下:
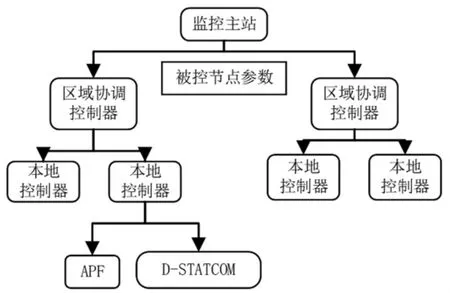
圖1 控制流程
(1)計算各控制節點電能質量治理裝置參數對各被控節點參數的靈敏度,即SVG 控制節點注入無功對各被控節點電壓的電壓-無功靈敏度和APF 控制節點注入諧波電流對各被控節點諧波電壓的諧波靈敏度。
(2)根據控制節點裝置容量和被控節點靈敏度等指標綜合考慮發生擾動時的各控制節點配置。對于APF,協調系數為各控制節點對該被控節點的諧波靈敏度與總諧波靈敏度之比;對于SVG,協調系數為各控制節點對該被控節點的電壓-無功靈敏度與總電壓-無功靈敏度之比;對于APF 和SVG,先忽略不同類控制節點相互之間的影響,根據上述只有一類控制節點時的分配方法配置SVG參數,再根據各被控節點對控制節點的電壓-無功靈敏度、諧波靈敏度和Kin(諧波電流與節點基波電壓之比)計算APF 的協調系數。
(3)監控主站實時監測各節點支路電流畸變率和電壓波動,基于各被控節點靈敏度指標計算各控制節點的協調系數,對各區域控制節點參數進行進一步優化配置。控制節點參數由區域控制器發送到各本地控制器。當區域協調控制器故障時,本地控制器基于下一條線路參數得到補償電流,協調系數置為1,轉發給控制節點。
4 仿真驗證
文中以文獻[9]的仿真算例為基礎,形成如圖2 所示15 節點配電網。分別在節點3、11、14 接諧波源,在節點5、9、13 接無功負荷。同時在節點 2、14 安裝 APF,在節點5 安裝 SVG。當 SVG 和 APF 自行調節時,節點 2、3、4、5、8、13、14 的電能質量指標如表1 所示。協調運行的各節點電能質量指標如表2 所示。
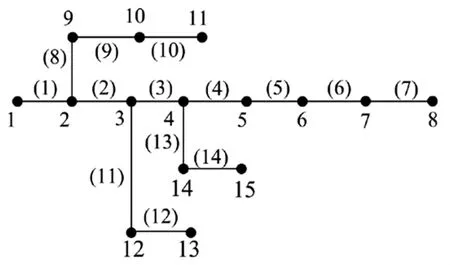
圖2 15 節點配電網網絡拓撲圖
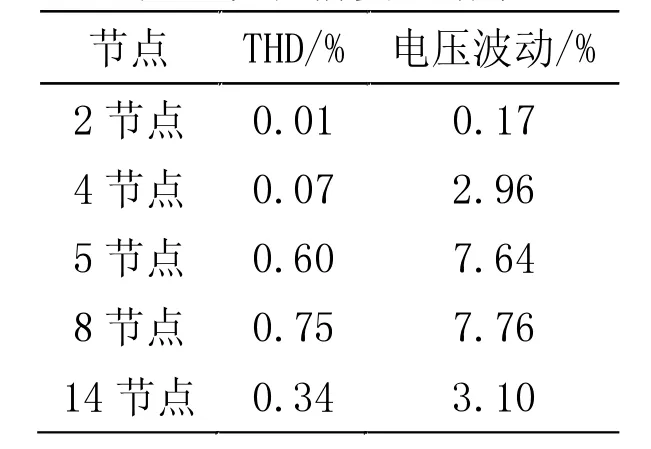
表1 優化前實驗結果
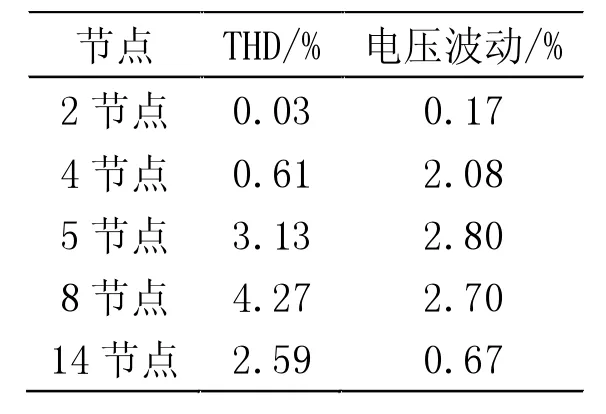
表2 優化后實驗結果
由表1、表2 數據可知,協調運行后在犧牲電流畸變率的情況下,電壓波動范圍得到改善,在應用時需要有所取舍。
6 結束語
文中通過監控主站的實時監測,基于各控制節點的靈敏度指標通過區域協調控制器設置協調系數,本地控制器基于協調系數調節各控制節點。從仿真結果來看,對于調節效果需要作出一定的取舍,進行進一步改善。在控制過程中,僅考慮了APF 和SVG 的諧波補償和無功補償能力,實際上兩類裝置都兼具更多功能,因此可以在更多方面進行配合協調控制。
猜你喜歡
奧秘(創新大賽)(2020年1期)2020-05-22 02:42:38
小學科學(學生版)(2019年10期)2019-11-16 08:55:02
小哥白尼(趣味科學)(2019年12期)2019-06-15 10:56:32
經濟技術協作信息(2018年32期)2018-11-30 01:43:16
通信電源技術(2018年3期)2018-06-26 06:34:18
人大建設(2018年2期)2018-04-18 12:17:00
電子制作(2016年23期)2016-05-17 03:54:05
電測與儀表(2016年5期)2016-04-22 01:14:14
河南電力(2016年5期)2016-02-06 02:11:24
電測與儀表(2015年13期)2015-04-09 11:57:38
