區分快慢變子系統的柔性機械臂控制方法
2021-01-27 09:41:06孫紹林
機械設計與制造 2021年1期
孫紹林
(貴州大學繼續教育學院,貴州 貴陽 550025)
1 引言
相比于傳統剛性機械臂,柔性機械臂因材質輕、高精度、高速度、低能耗等優勢而應用廣泛,但是柔性機械臂的長時間振動會影響系統定位精度,同時降低系統使用壽命,因此抑制甚至消除柔性機械臂振動意義重大。
柔性機械臂常用的控制方法包括PID 控制、模糊控制、最優控制、反演控制、變結構控制、魯棒控制、能量法等。文獻[1]使用改進PID 控制器抑制柔性機械臂末端振動,取得了一定效果;文獻[2]使用遺傳算法優化模糊控制,抑振效果明顯優于傳統模糊控制;文獻[3]使用反演控制法控制焊接機器人,取得了滿意效果;文獻[4]用變結構控制與Haar 小波結合對工業機械臂位置進行控制,控制精度較高;文獻[5]提出了改進和聲搜索-遺傳算法的魯棒控制器,與其他魯棒控制器相比,在超調量、調節時間上具有優勢;文獻[6]分別使用PID 法和能量法對末端振動進行控制,實驗驗證了能量法的準確性、可行性。當前對柔性機械臂跟蹤精度、振動抑制要求越來越高,單一控制方法已難以滿足要求。
使用奇異攝動法將柔性機械臂系統分解為快慢變兩個子系統,使用反演滑模變結構設計慢變子系統控制器,使用模糊控制設計快變子系統控制器,而后將快慢變控制律組合得到最終控制律。
經仿真驗證,與傳統PID 控制相比,組合控制在轉角誤差、穩定時間、末端振動量、轉角速度等多個方面優勢明顯。
2 柔性機械臂動力學建模
由于柔性機械臂粗長比極小,故機械臂梁模型選用Euler-Be-rnoulli 梁。柔性機械臂彈性變形描述準確性影響動力學模型準確性,鑒于假設模態法計算量小、效率高等優點,使用假設模態法描述柔性機械臂的彈性形變。
2.1 柔性機械臂彈性變形
單桿柔性機械臂示意圖,如圖1 所示。圖中OX0Y0 為慣性坐標系,OX1Y1 為切線坐標系,機械臂一端連接驅動電機,另一端連接質量塊m,u 為控制力矩,Jh為電機轉動慣量,E 為彈性模量,I 為橫截面對中性軸慣量矩,L 為機械臂長度,A 為橫截面積,ρ 為材料密度,θ(t)為剛性轉角,w(x,t)為點 P(橫坐標為 x)在 t 時刻的橫向彈性變形。

圖1 單桿柔性機械臂模型Fig.1 Single Arm Flexible Manipulator Model
由假設模態法可知,機械臂橫向彈性變形量w(x,t)為:

式中:n—模態數;Wi(x)—柔性機械臂固有振型函數;qi(t)—模態坐標。參考文獻[7-8],系統彈性形變主要集中在前2 階模態,故n=2。
2.2 柔性機械臂能量分析
柔性機械臂動能T 由兩部分組成,分別為機械臂動能T1和質量塊動能T2。機械臂自身動能T1為:

質量塊動能T2為:

則柔性機械臂總動能T=T1+T2。
柔性機械臂運動方式為在水平面內做旋轉運動,因此計算勢能時不考慮重力勢能,只考慮彈性勢能,為:

2.3 柔性機械臂動力學模型
使用拉格朗日方程建立柔性機械臂動力學方程,拉格朗日方程描述為:

式中:L=T-U—拉格朗日函數;Q—廣義力;z—廣義坐標變量。將機械臂系統動能和勢能代入式(2),解得動力學方程為:

式中:M—慣性矩陣;G—哥氏力和離心力矩的交叉耦合矩陣;K—剛度矩陣;u—機械臂控制力矩,p=[θ,q1,…,qn]T,F=[1,0,…,0]T。
3 系統組合控制原理
3.1 快慢變子系統分解方法
上節中提到,模態數n=2 較為合適,那么單桿柔性機械臂系統動力學方程可表達為:

由于慣性矩陣M 為正定矩陣,則其逆矩陣必然存在,記為H,則:
對式(4)左乘矩陣H,可得:
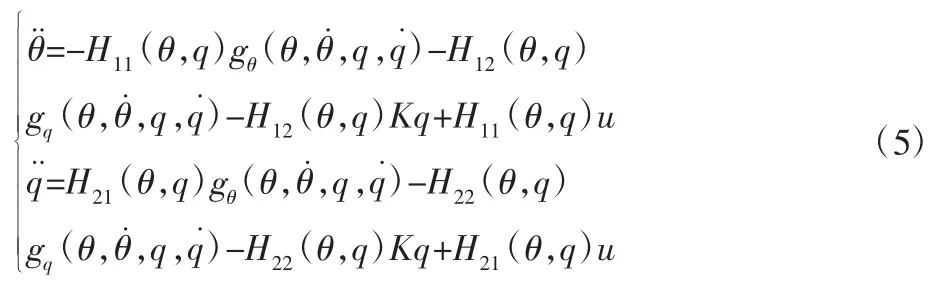

小參數μ 的存在使奇異攝動方程在快變量中顯示邊界層現象。將系統模型進行奇異分解[9],可以將快變子系統與慢變子系統分開。
令μ=0,由奇異攝動模型可以推導出慢變子系統動力學方程為:

其中下標s 表示此量為慢變量。

其中下標f 表示此量為快變量,用于描述柔性機械臂的彈性振動過程。

3.2 快慢變子系統組合控制原理
慢變子系統描述機械臂的剛性轉動過程,快變子系統描述柔性機械臂的彈性振動過程。慢變子系統具有較強的非線性和參數不確定性,滑模變結構控制對參數變化或θ 擾動不敏感,具有很強的魯棒性,但是存在抖振問題;反演控制能夠很好解決滑模變結構抖振問題,因此將反演控制與滑模變結構控制相結合,提出了慢變子系統的反演滑模變結構控制。
快變子系統是非線性時變系統,難以實現較為精確的控制。模糊控制不需要精確數學模型,具有較強容錯能力,特別適用于非線性、強耦合、時變、滯后系統,因此選擇模糊控制用于快變子系統控制。則柔性機械臂組合控制原理,如圖2 所示。

圖2 柔性機械臂組合控制原理Fig.2 Composite Control Principle of Flexible Manipulator
4 快慢變子系統組合控制器設計
4.1 慢變子系統控制器
使用反演滑模變結構控制法設計慢變子系統控制器。為簡化表達,將快變量下標 f 和慢變量下標 s 省略。記 x1=θ,x2=θ˙,那么式(6)可改寫為:

記機械臂期望剛性轉角為xd,要求xd具有二階導數,則誤差為定義虛擬控制量為,式中 c1>0
定義第一個Lyapunov 函數為V1=1/2e21,則:

定義切換函數σ=k1e1+e2,式中k1>0,將虛擬控制量代入切換函數,得:

易知式中 k1+c1>0,當滑模面 σ=0,則異號,則≤0,因此進行下一步設計。
定義第二個Lyapunov 函數為V2=V1+1/2σ2,則:


式中:h、β—常數,且 h>0、β>0;sgn()—符號函數。

4.2 快變子系統控制器
考慮到快變子系統模型不準確,而模糊控制能夠彌補模型不準確的影響[10-11],所以設計了抑制振動的模糊控制器。
記機械臂末端振動誤差值為e、誤差變化率為ec,則模糊控制器輸入量為e、ec,輸出量為uf。
(1)精確量的模糊化。對于模糊控制,等級劃分越細致則控制精度越高,但是計算量也會大大增加。模糊論域采用八段式,即將輸入量和輸出量變換到{NB,NM,NS,NZ,PZ,PS,PM,PB},分別代表負大、負中、負小、負零、正零、正小、正中、正大。確定振動誤差范圍 e∈[-0.15,0.15],單位為 rad,振動誤差變化率范圍 ec∈[-0.05,0.08],單位為 rad/s;控制力矩 uf∈[-10,10],單位為 Nm。將三個變量映射到模糊域[-6,6]中,易知量化因子為kc=40,kec=92.3,比例因子ku=1.67。輸入量和輸出量的三角形隸屬度函數圖,如圖3 所示。
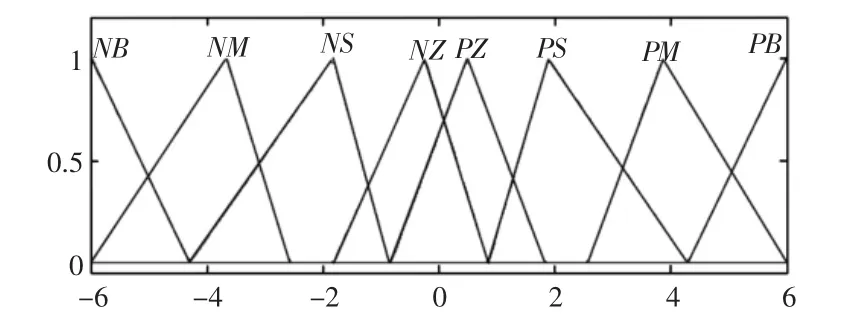
圖3 三角形隸屬度函數圖Fig.3 Triangle Membership Function
(2)制定模糊規則。模糊控制器的輸入量有兩個,輸出量有一個,每個量分為8 個等級,則需要制定64 條模糊規則。控制量的確定以減小振動為目標,即當振動誤差較大時,以快速消除誤差為主;當振動誤差較小時,以控制系統超調量為主。根據這一原則,制定模糊規則,如表1 所示。

表1 模糊控制規則Tab.1 Fuzzy Control Rule
(3)去模糊化。目前常用的去模糊化方法有重心法、最大值法、加權平均法。重心法精度最高,但是計算最復雜;最大值法相對簡單,但是誤差較大;加權平均法兼顧兩種方法優點,因此選用加權平均法進行去模糊化,方法為:

式中:z0—去模糊化后的值;zi—模糊值;μ(cz)i—zi的隸屬度。則快變量的控制量為=ku·z0。
5 仿真驗證及分析
ADAMS 用于機械系統運動學和動力學仿真,但是難以設計復雜控制器,而MATLAB 擁有足夠的控制工具箱,故設計了ADAMS 與MATLAB 聯合仿真的方法,聯合仿真原理,如圖4 所示。兩軟件之間每0.05s 進行一次數據交換。

圖4 聯合仿真原理Fig.4 Unite Simulation Principle
機械臂參數為:機械臂長度L=1200mm,截面寬度為4mm,面高度為60mm,彈性模量 E=2×1011N/m,材料密度 ρ=7.8×106kg/m3,末端質量塊m=1kg。
使用階躍響應驗證組合控制對柔性機械臂的控制效果。柔性機械臂在水平面內轉動,起始角度設為0,目標角度值設置為30°,仿真時間為 20s。
分別使用傳統PID 控制器與組合控制器控制柔性機械臂,PID 控制技術已經成熟,在此不再贅述,使用極點配置法求解PID參數,分別為 KP=100,Ti=2,Td=10。組合控制中慢變子系統控制器參數為h=0.5,k1=0.3,c1=1.2。PID 控制器與組合控制器作用下的轉動角,如圖5 所示。
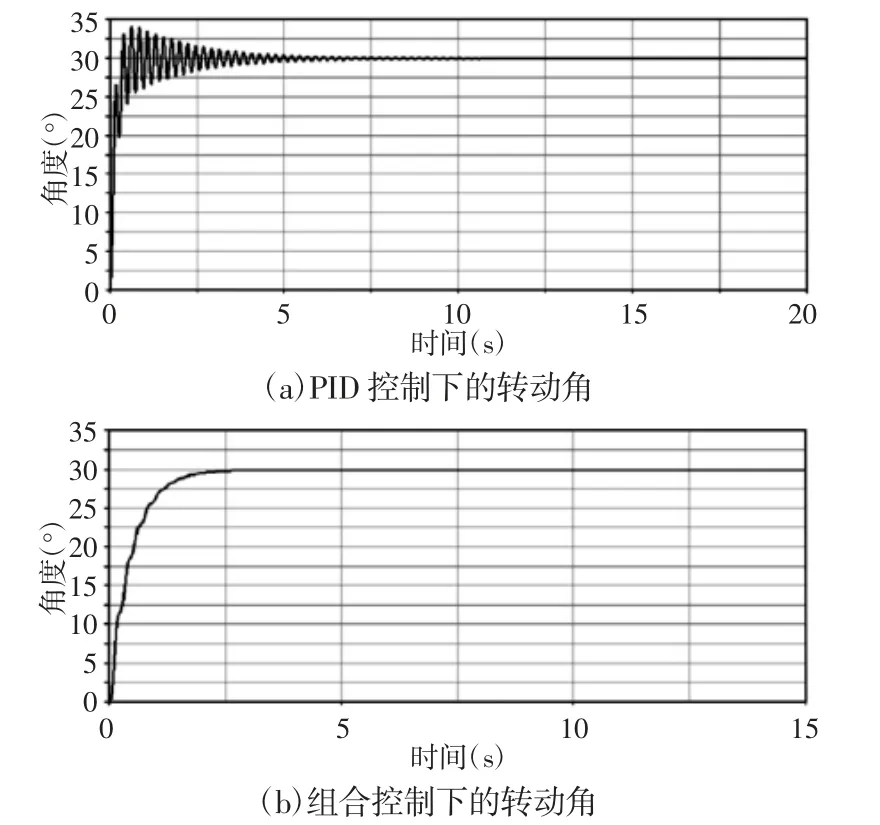
圖5 兩種控制器控制下的轉動角Fig.5 Rotating Angle under the Two Controllers
兩控制器控制下的轉動角速度,如圖6 所示。
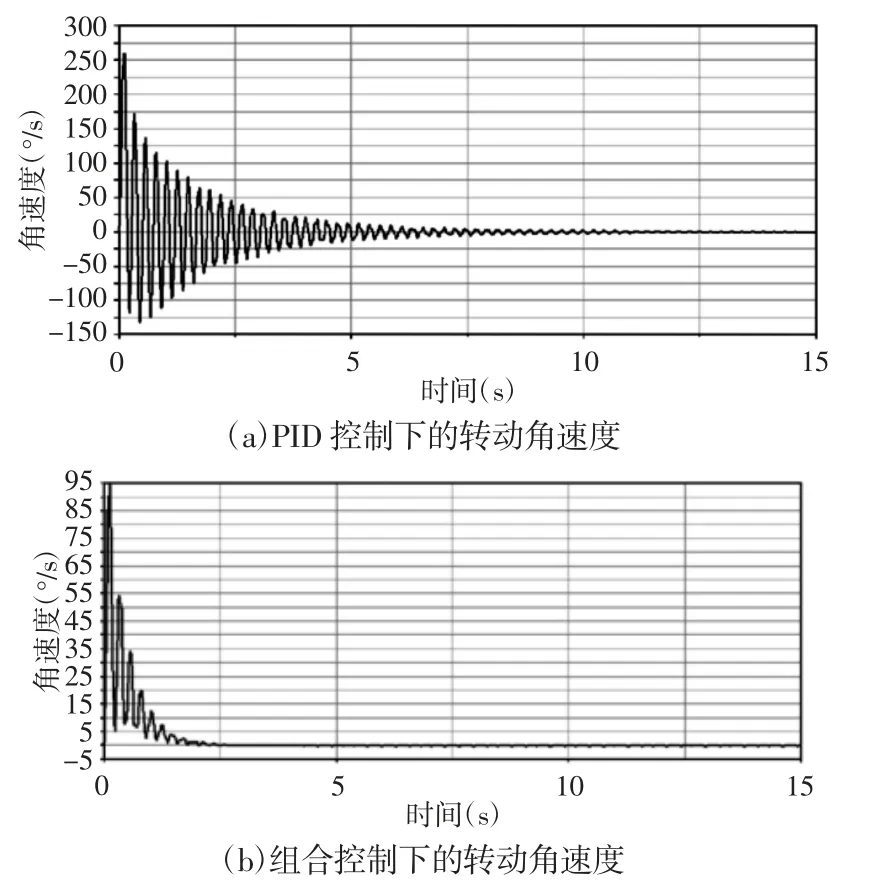
圖6 兩種控制器控制下的轉動角速度Fig.6 Rotating Angle Speed under the Two Controllers
兩控制器控制下的末端振動,如圖7 所示。
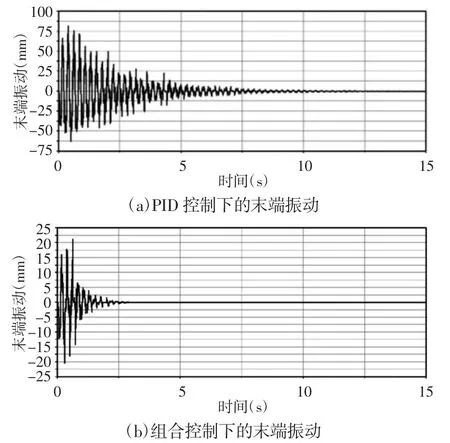
圖7 兩種控制器控制下的末端振動Fig.7 End Position Vibration Under the Two Controllers
兩控制器控制下的控制力矩,如圖8 所示。

圖8 兩種控制器控制下的控制力矩Fig.8 Control Moment Under the Two Controllers
為了更加精確地比較PID 控制器與組合控制器對柔性機械臂的控制效果,統計兩控制器的性能參數,如表2 所示。

表2 兩控制器控制效果對比Tab.2 Control Effect of the Two Controllers
從圖5~圖8 和表2 可以看出,與傳統PID 控制器相比,在組合控制下,柔性機械臂振動明顯減小,穩定時間明顯變短,加速度最大值遠遠減小,末端振動幅值遠遠減小,力矩值遠遠減小,在節省能量同時,維護了系統穩定,可以極大地保護系統。
組合控制器在柔性機械臂控制中性能遠遠優于PID 控制,這是因為組合控制器針對快慢變子系統各自的特性,有針對性地分別設計了控制器,在減小柔性機械臂振動的同時,提高了控制精度。
6 結論
經過分析和仿真驗證,可以得出以下結論:(1)奇異攝動法可以有效地將機械臂系統分解為快變子系統和慢變子系統,其中慢變子系統描述旋轉過程,快變子系統描述振動過程;(2)反演滑模變結構可以精確控制機械臂慢變子系統的旋轉過程,模糊控制器可以有效抑制機械臂快變子系統的振動過程;(3)與傳統PID控制器相比,在組合控制器的控制下,柔性機械臂轉動角誤差下降了99%,穩定時間減少了75%,最大末端振動量減少了74.1%,充分證明了組合控制器在柔性機械臂控制中的有效性。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
天天愛科學(2020年6期)2020-09-10 07:22:44
當代工人(2020年8期)2020-05-25 09:07:38
數學物理學報(2017年6期)2018-01-22 02:26:40
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
科技知識動漫(2016年8期)2016-07-29 20:40:09
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44
