自適應(yīng)神經(jīng)模糊推理的方向駕駛員模型研究
2021-01-27 09:41:08曹艷玲
機(jī)械設(shè)計與制造 2021年1期
曹艷玲,張 琦
(河南科技大學(xué)車輛與交通工程學(xué)院,河南 洛陽 471003)
1 引言
近年來隨著我國汽車保有量的增加,交通事故總量也逐年增加,汽車安全問題已經(jīng)引起了人們高度重視。然而這些交通事故的背后實際上與駕駛員對車輛的操縱有直接的關(guān)系。研究結(jié)果表明,80%的交通事故是由駕駛員誤判造成的[1]。駕駛員對車輛的操縱實際上受到許多因素的影響。例如:駕駛技術(shù)水平、駕駛員對車況、路況的掌握情況、駕駛員生理、心理等因素。這些因素實際上是很難控制的。因此,針對駕駛員模型的應(yīng)用是很有必要的,會降低人為原因引起的交通事故。
隨著控制理論及傳感器技術(shù)的發(fā)展,有效的推動了駕駛員模型的發(fā)展,將現(xiàn)代控制技術(shù)應(yīng)用到駕駛員模型中是未來汽車行業(yè)的熱門研究方向。根據(jù)建模的方法分為經(jīng)典控制理論、基于模糊邏輯、神經(jīng)網(wǎng)絡(luò)等非線性控制理論及基于認(rèn)知架構(gòu)的駕駛員行為建模[2]。國內(nèi)外很多學(xué)者均作出貢獻(xiàn):文獻(xiàn)[3]建立的預(yù)瞄時間自適應(yīng)的最優(yōu)預(yù)瞄駕駛員模型,根據(jù)建立的優(yōu)化函數(shù),恰當(dāng)?shù)倪x取預(yù)瞄時間使得車輛穩(wěn)定通過測試路徑。文獻(xiàn)[4]于1982 年提出了預(yù)瞄-跟隨系統(tǒng)理論,將決策部分為預(yù)瞄和補(bǔ)償跟隨兩個階段,并建立了預(yù)瞄最優(yōu)曲率模型。MACADAM CC 用BP 神經(jīng)網(wǎng)絡(luò)訓(xùn)練建立駕駛員模型[5]。文獻(xiàn)[6]用遺傳算法優(yōu)化BP 神經(jīng)網(wǎng)絡(luò),并建立了預(yù)瞄優(yōu)化神經(jīng)網(wǎng)絡(luò)駕駛員模型。文獻(xiàn)[7]基于遺傳算法離線整定和神經(jīng)網(wǎng)絡(luò)在線整定的駕駛員模型,能夠?qū)壽E進(jìn)行很好跟蹤。文獻(xiàn)[8]以車輛航向角和橫向位移偏差對車輛方向進(jìn)行控制,并用遺傳算法優(yōu)化駕駛員模型參數(shù),仿真顯示所建立駕駛員模型能夠有效跟隨路徑。文獻(xiàn)[9]通過優(yōu)化傳統(tǒng)增量式PID 控制算法,提出了一種新型增量式PID 控制算法對車輛進(jìn)行控制,車輛能夠很好的對預(yù)期路徑進(jìn)行跟蹤且響應(yīng)速度較快。文獻(xiàn)[10]設(shè)計了二階自抗擾控制器對轉(zhuǎn)向系統(tǒng)進(jìn)行控制并結(jié)合建立的七自由度非線性車輛模型進(jìn)行仿真,仿真結(jié)果顯示二階自抗擾控制器具有較高的控制精度。文獻(xiàn)[11]提出了一種基于方向預(yù)瞄的內(nèi)模駕駛員模型。仿真結(jié)果表明,所建立的內(nèi)模駕駛員模型能夠有效地用于汽車轉(zhuǎn)向控制,并體現(xiàn)駕駛員對不確定參數(shù)的適應(yīng)性。
駕駛員模型分為速度駕駛員模型和方向駕駛員模型,前者是通過節(jié)氣門及剎車系統(tǒng)對車輛縱向速度進(jìn)行控制,后者是通過操縱轉(zhuǎn)向系統(tǒng)讓車輛沿著目標(biāo)軌跡行駛。以方向駕駛員模型為研究對象,首先在車輛動力學(xué)仿真軟件Carsim 中采集道路參考線到預(yù)瞄點的橫向偏差及道路參考線和車輛X 軸之間面積偏差數(shù)據(jù)。在Matlab/Simulink 中用自適應(yīng)神經(jīng)模糊推理系統(tǒng)對采集的仿真數(shù)據(jù)進(jìn)行訓(xùn)練,將提取出的If-Then 規(guī)則讀取到Fuzzy 控制器中并與車輛動力學(xué)仿真軟件Carsim 中的車輛模型進(jìn)行聯(lián)合仿真。仿真結(jié)果顯示跟蹤軌跡誤差較小且車輛的操縱穩(wěn)定性較好,證明了基于自適應(yīng)神經(jīng)模糊推理系統(tǒng)建立的駕駛員模型具有良好的軌跡跟蹤能力和良好的車輛操縱穩(wěn)定性能。
2 車輛整車模型建立
2.1 Carsim 軟件的簡介
CarSim 是專業(yè)的車輛動力學(xué)的仿真軟件其模型運算速度快,主要對車輛的操縱穩(wěn)定性、制動性、平順性、動力性和經(jīng)濟(jì)性進(jìn)行仿真。近年來隨著無人駕駛汽車的推動,CarSim 也用于無人駕駛汽車控制系統(tǒng)的開發(fā)。CarSim 具有160 多個可導(dǎo)入的輸入變量560 多個輸出變量,可以靈活的和Matlab/Simulink、Labview等仿真軟件進(jìn)行聯(lián)合仿真。在Carsim 的主界面,其中左側(cè)為車輛各組成部分的參數(shù)及仿真工況,中間部分是數(shù)學(xué)模型求解部分,最右側(cè)是仿真動畫和參數(shù)輸出。
2.2 車輛模型建立
車輛整車模型包括:車體部分、空氣動力學(xué)部分、傳動系統(tǒng)、制動系統(tǒng)、轉(zhuǎn)向系統(tǒng)、前后懸架系統(tǒng)、車輪,如圖1 所示。仿真所用車輛參數(shù)均采用默認(rèn)值。

圖1 車輛模型建立Fig.1 Vehicle Modeling
3 自適應(yīng)神經(jīng)模糊推理的結(jié)構(gòu)
由于模糊技術(shù)不需要建立精準(zhǔn)的數(shù)學(xué)模型,因此在工程領(lǐng)域當(dāng)中應(yīng)用十分廣泛。其實際上是將人們長時間工作的控制經(jīng)驗轉(zhuǎn)化為相應(yīng)的控制規(guī)則表,工作過程中根據(jù)需求輸出相應(yīng)的規(guī)則對被控對象進(jìn)行控制。但是模糊控制器規(guī)則的確定和隸屬度函數(shù)的調(diào)整通常需要長時間的工作經(jīng)驗或者專家知識,這些通常具有一定的主觀性。因此模糊規(guī)則的確定及隸屬度函數(shù)的調(diào)整往往成為建立模糊控制器的主要難題。神經(jīng)網(wǎng)絡(luò)是模擬人腦建立起來的數(shù)學(xué)模型,具有一定的人腦功能,如:模式分類、聯(lián)想記憶、信息處理、自學(xué)習(xí)。其中自學(xué)習(xí)功能是是神經(jīng)網(wǎng)絡(luò)的最大優(yōu)勢,從而使其具有一定處理信息及推理能力。綜上所述,如果將模糊控制技術(shù)及神經(jīng)網(wǎng)絡(luò)控制技術(shù)融合在一起,就能有效降低人們在設(shè)計模糊控制器過程當(dāng)中遇到的困難,例如:隸屬度函數(shù)的選取及調(diào)整、模糊規(guī)則的確定、人的主觀因素對模糊規(guī)則的影響等。
自適應(yīng)神經(jīng)模糊推理系統(tǒng)能夠有效解決上述問題,神經(jīng)網(wǎng)絡(luò)技術(shù)能夠從大量的輸入輸出數(shù)據(jù)中自動建立模糊推理系統(tǒng)(FIS),其中模糊規(guī)則的提取和隸屬度函數(shù)的選取及優(yōu)化是使用神經(jīng)網(wǎng)絡(luò)技術(shù)計算得出,讓人們從建立模糊控制器的難題中脫離出來。
3.1 自適應(yīng)神經(jīng)模糊推理系統(tǒng)的結(jié)構(gòu)
自適應(yīng)神經(jīng)模糊推理系統(tǒng)以Takagi-Sugeno 模型為基礎(chǔ),ANFIS 結(jié)構(gòu)圖,如圖2 所示。對于一階Takagi-Sugeno 模糊具有如下If-then 規(guī)則。

式中:x、y—系統(tǒng)兩個的輸入;fi—系統(tǒng)的唯一輸出;Ai、Bi—模糊集;pi,qi,ri—訓(xùn)練過程中確定的參數(shù),每層節(jié)點具有相同的函數(shù)。

圖2 ANFIS 系統(tǒng)結(jié)構(gòu)Fig.2 ANFIS System Structure
第一層:對x 和y 兩個輸入變量進(jìn)行模糊化。

式中:x、y—輸入;μAi-2、μBi-2—隸屬度函數(shù)。
第二層:本層的固定節(jié)點用于計算每條規(guī)則的適用度,將所有輸入信號相乘并輸出。

第三層:本層的固定節(jié)點對每條規(guī)則進(jìn)行歸一化計算。

第四層:本層節(jié)點是自適應(yīng)節(jié)點用于計算各條規(guī)則的輸出。

式中:ωi—激勵強(qiáng)度;{pi,qi,ri}—結(jié)論參數(shù)。
第五層:本層為一個固定節(jié)點,將上層所有輸入進(jìn)行求和作為系統(tǒng)的總輸出。

4 基于ANFIS 的方向駕駛員模型
4.1 訓(xùn)練數(shù)據(jù)采集
訓(xùn)練數(shù)據(jù)通常通過試驗采集或者仿真采集,訓(xùn)練數(shù)據(jù)由車輛在車輛動力學(xué)軟件Carsim 中進(jìn)行典型路況的仿真來獲得。選取道路參考線到預(yù)瞄點的橫向偏差及道路參考線和車輛X 軸之間面積偏差兩個變量作為自適應(yīng)神經(jīng)模糊推理系統(tǒng)的訓(xùn)練數(shù)據(jù),仿真共獲得1200 組數(shù)據(jù)。
4.2 自適應(yīng)神經(jīng)模糊推理的方向駕駛員模型的訓(xùn)練
4.2.1 調(diào)用Anfis 編輯器
以Matlab R2016b 版本來進(jìn)行ANFIS 的設(shè)計及訓(xùn)練。首先啟動Matlab 在主窗口輸入Fuzzy 點擊回車出現(xiàn)FIS 編輯界面,在FIS 的界面菜單中點擊File→New FIS→Sugeno 彈出FIS 編輯器(Sugenon)界面。因為輸入數(shù)據(jù)為兩組故需添加一個輸入變量使之成為雙輸入單輸出的結(jié)構(gòu),點擊菜單File→add Variable→Input。再點擊File→Export→To Work space 將控制器名字改為“jiashiyuanmoxing”,將兩個輸入變量的名字改為L 和A 輸出變量名字改為SW。
4.2.2 導(dǎo)入仿真數(shù)據(jù)
在FIS 的界面菜單中點擊Edit→Anfis 彈出Anfis(jiashiyuanmoxing)界面,并載入1200 組仿真數(shù)據(jù)用于訓(xùn)練,并選取偶數(shù)行數(shù)據(jù)作為測試數(shù)據(jù)并分別命名為“jiashiyuanxunlianData”“jiashiyuanceshiData”。
4.2.3 模糊推理系統(tǒng)初始化及訓(xùn)練
在編輯窗口的Generate FIS 區(qū)域選取Grid partition,點擊Generate FIS 進(jìn)行初始化設(shè)計,隸屬度函數(shù)選取三角函數(shù)(trimf)型并將隸屬度函數(shù)設(shè)置為(8 8)輸出類型選取linear。然后在Train一欄中將Optim.method 設(shè)置為hybrid,Error Tolerance 誤差精度設(shè)置為0,Epochs 設(shè)置為最大次數(shù)50 次。點擊Train Now 進(jìn)行訓(xùn)練,得到模糊規(guī)則,如圖3 所示。最后將自適應(yīng)神經(jīng)模糊推理得到的Fis 讀取到Fuzzy 控制器中,將其作為方向駕駛員模塊并命名為“jiashiyuanmoxing”。
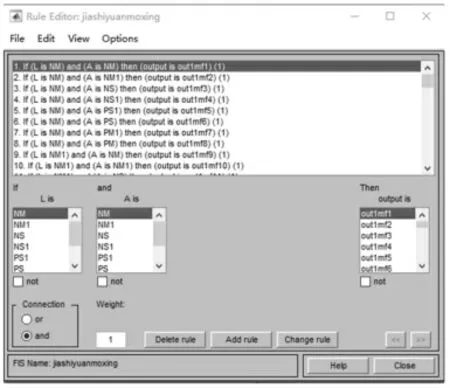
圖3 規(guī)則查看器Fig.3 Rule Viewer
5 聯(lián)合仿真
方向駕駛員模型和整車動力學(xué)模型聯(lián)合仿真結(jié)構(gòu)圖,如圖4所示。其中“jiashiyuanmoxing”為方向駕駛員模塊。“CarSimS-Function”為第二章所建立的整車動力學(xué)模塊。其中“jiashiyuanmoxing”模塊根據(jù)道路參考線到預(yù)瞄點的橫向偏差及道路參考線和車輛X 軸之間面積偏差兩個輸入變量決策出最優(yōu)的方向盤轉(zhuǎn)角SW,在輸入到CarSim S-Function 整車動力學(xué)模塊中對車輛轉(zhuǎn)向進(jìn)行控制,Carsim 將求解出來的兩個車輛變量再輸入到“jiashiyuanmoxing”方向駕駛員模塊中以此循環(huán)對車輛實時控制。聯(lián)合仿真的優(yōu)點是直接調(diào)用Carsim 中的車輛動力學(xué)模型省去了搭建物理樣機(jī)實驗的周期且仿真數(shù)據(jù)獲取方便。

圖4 聯(lián)合仿真結(jié)構(gòu)圖Fig.4 Joint Simulation Structure Diagram
6 仿真結(jié)果分析
為了證明建立的自適應(yīng)神經(jīng)模糊推理的方向駕駛員模型的路徑跟蹤的有效性,設(shè)定在雙移線工況進(jìn)行聯(lián)合仿真,路面附著系數(shù)設(shè)定為0.85,仿真位移設(shè)定為210m。由于進(jìn)行單一方向仿真,故車速設(shè)定為恒速120km/h。仿真結(jié)果分析:方向駕駛員模型的輸出變量方向盤轉(zhuǎn)角,如圖5 所示。路徑跟蹤結(jié)果,如圖6 所示。根據(jù)仿真結(jié)果顯示:基于自適應(yīng)神經(jīng)模糊推理的方向駕駛員模型的橫向位移誤差在(-0.15~0.1)m 跟蹤誤差較小,我國公路規(guī)定的寬度為3.75m[12],根據(jù)仿真輸出數(shù)據(jù),所產(chǎn)生的跟蹤誤差小于道路單側(cè)寬度。綜上所述:基于自適應(yīng)神經(jīng)模糊推理的方向駕駛員模型具有良好的跟蹤性能。

圖5 方向盤轉(zhuǎn)角Fig.5 Steering Wheel Angle

圖6 路徑跟蹤Fig.6 Path Tracking
7 結(jié)論
為了提高方向駕駛員模型對目標(biāo)路徑的跟蹤精度,進(jìn)行了以下工作與創(chuàng)新:(1)在Carsim 中建立了整車模型,仿真出一臺較為真實的整車模型提高了被控對象的精度,使控制結(jié)果更加準(zhǔn)確。(2)將自適應(yīng)神經(jīng)網(wǎng)絡(luò)的模糊推理系統(tǒng)用于方向駕駛員模型領(lǐng)域。仿真結(jié)果表明,將神經(jīng)網(wǎng)絡(luò)技術(shù)能夠有效的用于完成模糊規(guī)則的提取、隸屬度函數(shù)的選取及優(yōu)化,提高了方向駕駛員模型的建模精度。
綜上所述,建立了一種基于自適應(yīng)神經(jīng)模糊推理的方向駕駛員模型,根據(jù)道路參考線到預(yù)瞄點的橫向偏差及道路參考線和車輛X 軸之間面積偏差兩個變量,決策出最優(yōu)的方向盤轉(zhuǎn)角對車輛進(jìn)行轉(zhuǎn)向控制。根據(jù)仿真結(jié)果可得以下結(jié)論:所建立方向駕駛員模型具有良好的非線性能,能較好的對目標(biāo)路徑進(jìn)行跟蹤,能夠真實模擬駕駛員對車輛的操縱行為。
猜你喜歡
汽車實用技術(shù)(2022年14期)2022-07-30 06:13:42
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
汽車實用技術(shù)(2022年4期)2022-03-07 06:07:20
計算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
數(shù)學(xué)小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
計算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
計算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學(xué)報(哲學(xué)社會科學(xué)版)(2016年9期)2017-01-15 13:52:02
公民與法治(2016年4期)2016-05-17 04:09:26
