仿生撲翼飛行器驅動機構運轉速度波動對比研究
2021-01-27 09:41:24劉光澤劉新杰張博利
機械設計與制造 2021年1期
張 威 ,劉光澤 ,劉新杰 ,張博利
(1.中國民航大學航空工程學院,天津 300300;2.中國民航大學基礎實驗中心,天津 300300;3.中國民航大學航空地面特種設備研究基地,天津 300300)
1 引言
一直以來,鳥類和昆蟲扇動翅膀飛行的模式一直引發著人類極大的興趣,同時也激發著很多飛行器設計者不斷的努力與探索。鳥類在空中飛行時通過拍動或平展雙翼,能夠實現前進、盤旋、滑行以及快速俯沖等一系列飛行動作[1-2],具有很高的靈活性和機動性。正是由于撲翼飛行器具有如此突出的優點,所以探索和研制具有高機動性和低能耗的微型仿生撲翼飛行器具有很好的發展前景[3]。無論是在軍用還是民用領域都發揮著積極的作用:在民用領域,撲翼飛行器可以執行空中視頻拍攝、森林中野生動物的檢測以及實現狹小空間的救援等任務[4];在軍用領域,撲翼飛行器可以執行近距離的電子干擾和壓制、追蹤目標以及在特殊環境下的偽裝偵查等任務[5-7]。
美國是最先進行撲翼飛行器探索和研究的國家,在小尺度撲翼飛行器的研制方面,哈佛大學研制的仿生飛行器是世界上第一款昆蟲大小的撲翼飛行器,它的重量僅有60mg,翼展為3cm,各個部分的構件均采用的是精密加工技術,所以尺寸較小[8-9]。德國Festo 公司研制的撲翼飛行器與哈佛大學的恰恰相反,它主要集中在大尺度撲翼飛行器方面的研究,其研制的仿海鷗撲翼飛行器重量可達485g,翼展為1.96m,它主要是根據蜻蜓進行仿生研制的,采用兩對翅翼相互之間的協調配合拍動來實現空中飛行和機動。它的翅翼主要包含碳纖維框架和薄箔膜,其胸腔內部安裝有九個控制不同功能的伺服電機來操縱翅翼的拍動、扭轉和尾翼的擺動[10]。除此之外,美國Aero Vironment 公司研制的仿蜂鳥撲翼飛行器重量只有19g,翼展16cm,飛行速度可達每小時11 英里,續航時間可達10min。與其它撲翼飛行器不同的是這種飛行器沒有尾翼,主要是依靠翅翼相互之間的拍動和扭轉來實現空中靈活飛行。它最主要的優點是可以進行空中懸停,這是目前大多數仿生撲翼飛行器所不能實現的[11-12]。
對于仿生撲翼飛行器的研究,國內雖然起步相對較晚,但是在科研人員的持續不斷努力下也取得了一些研究成果[13-14]。在飛行機理的研究方面,北京航空航天大學的孫茂團隊提出了撲翼在飛行過程中產生高升力的三個機制:拍動開始階段的快速加速機制、拍動中的不失速機制和拍動結束階段的快速上揚機制,在翅翼進行拍動起始的加速階段以及拍動結束時的快速上仰運動可以產生較大的氣動升力[15-16]。南京航空航天大學的昂海松團隊借鑒德國Festo 公司SmartBird 撲翼鳥,研制出了一種多段柔性體變形撲翼飛行器,它的骨架主要是由碳纖維材料和樹脂塑料等材料加工制作而成,可以實現平飛、爬升、偏航等飛行動作[17-19]。中國民航大學的張威團隊對撲翼機構的剛體運動學以及運動的同步性進行了一定的研究[20-22],同時論證了可在系統中增加柔性裝置來減小電機的峰值轉矩[23]。西北工業大學研制的一款微型仿生撲翼飛行器采用的是聚合物鋰電池作為供能裝置,使用微型電機驅動,機架結構主要由碳纖維材料制成,機翼材料主要是由柔性聚酯薄膜制作而成,重量僅有16.5g,翼展為230mm,續航時間可達(15~21)s[24]。上海交通大學研制的微型撲翼飛行器采用的是壓電陶瓷晶片進行驅動[25],其單側翼展長15mm,翅翼薄膜厚度為1.5μm,由于各部件尺寸很小,因此加工時主要采用微尺度機械加工的方法[26]。
Delaware 大學研制的“Sparrow”撲動機構基本構型,如圖1(a)所示。也即文中所提到的構型一,其主要機構曲柄滑塊機構將圓周運動轉換為直線往復運動,在此機構上不安裝任何柔性裝置;彈簧①②是安裝在翅翼兩側的彈簧,即構型二;彈簧③是安裝在系統頂部的彈簧,即構型三。構型四是彈簧①②③的組合,即在翅翼兩側和系統頂部同時安裝柔性彈簧,如圖1(b)所示。先對機構進行了動力學理論方面的分析,然后在恒壓驅動條件下對機構進行仿真,觀察四種構型中電機轉速的波動變化情況。
2 機構動力學方程
不安裝彈簧的撲翼機構原理圖,如圖1(a)所示;在翅翼兩側或系統頂部安裝彈簧的機構原理圖,如圖1(b)所示;曲柄OA 的質量為m1,對應的轉動慣量為J1,如圖1 所示;連桿AB 的質量為m2,對應的轉動慣量為J2;和連桿相連的滑塊的質量為m3;和左、右翅翼相連的滑塊的質量均為m4;左、右翅翼的質量均為m5,對應的轉動慣量為J3;安裝在翅翼兩側的彈簧①②剛度系數分別為k1,k2,且k1=k2;安裝在系統頂部彈簧③的剛度系數為k3。其余參數標注,如圖1 所示。

圖1 撲翼機構構型原理圖Fig.1 Schematic Diagram of Flapping Wing Configuration
同時根據文獻[23]列出系統的動力學方程,如式(1)所示。

式中:λ1,λ1—拉格朗日乘子;x1—和連桿相連的滑塊運動的距離;x2—和兩側翅翼相連的滑塊運動的長度。而且有:

然后分別對θ1,θ2,θ3進行拉格朗日方程求解得:

τL和τa分別為負載轉矩和氣動轉矩。求得系統的動力學方程可表示為:

由于直流電機與曲柄固連,所以電路可以簡化為一個由電機電樞電動勢、電阻、電感及負載的簡單模型。對該模型采用基爾霍夫電壓定律得到電動勢平衡方程[23]如下:

電機的轉速波動可表示為:

式中:Um—電機上的電壓;Em—電機電樞的感應電動勢;Rm—電機電樞的電阻;Im—流經電機電樞的電流;Lm—電機電樞的電感;τm—電機的轉矩,順時針方向進行旋轉;Ke—感生電動勢系數;Kt—電機轉矩系數,且Kt=Ke;wm—電機電樞旋轉的角速度;τL—電機的負載轉矩,順時針方向旋轉;Jm—電機的轉動慣量。
3 驅動機構速度波動分析
在恒定電壓條件下對系統模型進行仿真得到電機的轉速波動變化情況,如圖2~圖8 所示。
3.1 構型一
為了進行更好的比較和分析,我們首先對“Sparrow”基本結構進行仿真分析,觀察機構運動過程中電機的轉速波動變化情況。構型一,即系統未安裝柔性彈簧時,電機的轉速波動變化曲線,如圖2 所示。

圖2 構型一電機轉速變化曲線Fig.2 Speed Change Curve of Configuration One
從圖2 中可以看出,在一個周期變化過程中,轉速的最大值為300.1268r/min,轉速的最小值為299.8660r/min,轉速的波動范圍大小為0.2608r/min。
3.2 構型二和構型一比較

圖3 構型二電機轉速變化曲線Fig.3 Speed Change Curves of Configuration Two
為了得到在機構中增加柔性裝置后電機的轉速波動變化情況,我們在原有的“Sparrow”構型的翅翼兩側安裝柔性彈簧,然后對機構在相同恒定電壓條件進行仿真,得到電機的轉速波動變化曲線,如圖3 所示。
從圖3 中曲線可以看出,和未安裝彈簧的機構相比,在系統中安裝柔性彈簧可以適當降低電機的轉速波動變化。對比表1 中不同彈簧剛度條件下電機轉速的波動變化可以看出,當k1=k2分別為 0.05N/mm、0.07N/mm、0.09N/mm、0.11N/mm 時,一個周期內電機的最大轉速分別為300.1116r/min、300.1064r/min、300.1014r/min、300.1084r/min,電機的最小轉速分別為 299.8854r/min、299.8906r/min、299.8957r/min、299.8822r/min,對應的轉速波動變化范圍分別為 0.2262r/min、0.2158r/min、0.2057r/min、0.2262r/min,轉速減小的百分比13.27%、17.25%、21.13%、13.27%。從中可以看出,當彈簧剛度為0.09N/mm 時,轉速的波動變化最小,和無柔性彈簧的系統相比,轉速波動減小的百分比最大。

表1 構型二不同彈簧剛度條件下電機轉速變化情況Tab.1 Motor’s Speed Changes under Different Spring Stiffness Conditions of Configuration Two
3.3 構型三和構型一比較
由3.2 節中在翅翼兩側增加柔性彈簧后的仿真分析可以得到,在翅翼兩側增加柔性彈簧可以減小電機的轉速波動,為了得到在系統頂部安裝柔性彈簧,即構型三能否減小電機的轉速波動,我們在“Sparrow”構型中的頂部安裝柔性彈簧,然后在相同恒定電壓條件下進行仿真,得到電機的轉速波動變化曲線,如圖4所示。

圖4 構型三電機轉速變化曲線Fig.4 Speed Change Curves of Configuration Three
從圖中可以看出,和不安裝彈簧系統的構型相比,在系統頂部安裝彈簧也可以減小電機的轉速波動。對比表2 中不同彈簧剛度條件下電機轉速波動變化的具體數據可以看出,當彈簧剛度 k3分別取 0.5N/mm、0.7N/mm、0.9N/mm、1.1N/mm、1.3N/mm、1.5N/mm 時,電機的最大轉速分別為 300.1028r/min、300.0936r/min、300.0848r/min、300.0770r/min、300.0833r/min、300.0909r/min,電機的最小轉速分別為 299.8906r/min、299.9000r/min、299.9092r/min、299.9168r/min、299.9101r/min、299.9021r/min,轉速波動變化范圍分別為0.2122r/min、0.1936r/min、0.1756r/min、0.1602r/min、0.1732r/min、0.1888r/min,轉速波動減小的百分比分別為18.63%、25.07%、32.67%、38.57%、33.59%、27.61%。可以看出,當k3=1.1N/mm 時,轉速波動變化最小,相比于未安裝彈簧的構型,轉速波動減小的百分比最大。

表2 構型三不同彈簧剛度條件下電機轉速變化情況Tab.2 Motor’s Speed Changes under Different Spring Stiffness Conditions of Configuration Three
3.4 構型四和構型一比較
從構型二和構型一,構型三和構型一的比較分析過程我們可以得到當在翅翼兩側安裝彈簧或者在系統頂部安裝彈簧均能在一定程度上減小電機的轉速波動。為了探究兩種構型的組合是否可以更大程度的減小電機的轉速波動,我們對兩種構型的組合彈簧取不同剛度值進行了仿真分析,觀察電機的轉速波動變化情況。一條曲線均為未安裝彈簧時電機的轉速波動變化曲線,如圖5~圖7 所示。從圖中數據可以看出,當在翅翼兩側和系統頂部同時安裝彈簧也可以減小電機的轉速波動,但是兩種構型的彈簧選取不同的剛度值時,電機的轉速波動情況也不盡相同。從圖5 中的曲線變化,可以看出,當k1=k2=0.1N/mm,k3分別取0.9N/mm、0.7N/mm、0.5N/mm、0.3N/mm、0.1N/mm 時,電機的轉速最大值分別為 300.1536r/min、300.1407r/min、300.1280r/min、300.1155r/min、300.1033r/min。電機轉速的最小值分別為 299.8366r/min、299.8466r/min、299.8625r/min、299.8752r/min、299.8876r/min,轉速波動大小分別為 0.3170r/min、0.2941r/min、0.2655r/min、0.2403r/min、0.2157r/min。從中可以看出,當 k1=k2=0.1N/mm,k3=0.1N/mm 時,電機的轉速波動范圍最小,為0.2157r/min。從圖6 中電機的轉速波動變化可以看出,當k1=k2=0.09N/mm,k3分別取0.4N/mm、0.2N/mm、0.1N/mm、0.08N/mm 時,電機轉速的最大值分別為300.1104r/min、300.0987r/min、300.0958r/min、300.0969r/min。電機轉速的最小值分別為 299.8805r/min、299.8924r/min、299.8982r/min、299.8993r/min。轉速波動大小分別為0.2299r/min、0.2063r/min、0.1976r/min、0.1976r/min。從中可以看出,當 k1=k2=0.09N/mm,k3=0.08N/mm 時,電機的轉速波動范圍最小,為0.1976r/min。
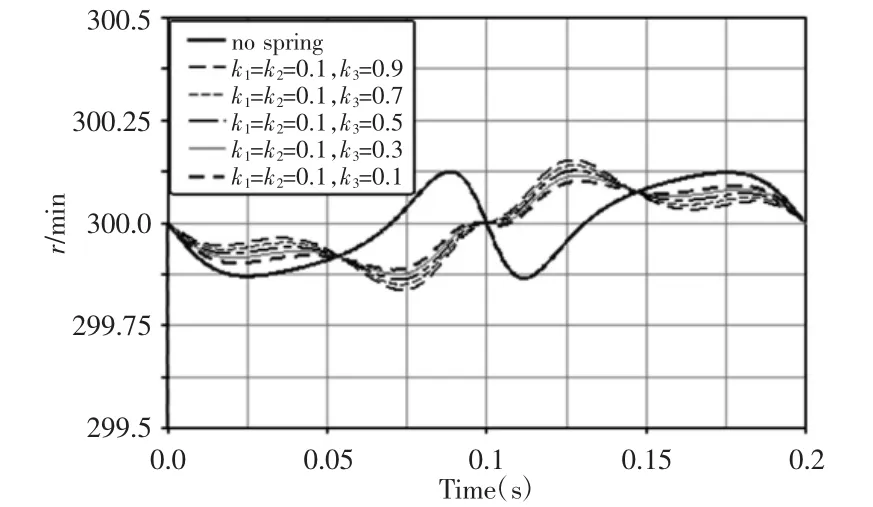
圖5 k1=k2=0.1N/mm 保持不變,k3 取不同值時轉速的變化曲線Fig.5 The Speed Variation Curves When k1=k2=0.1N/mm Remains Unchanged,and k3 Takes Different Values
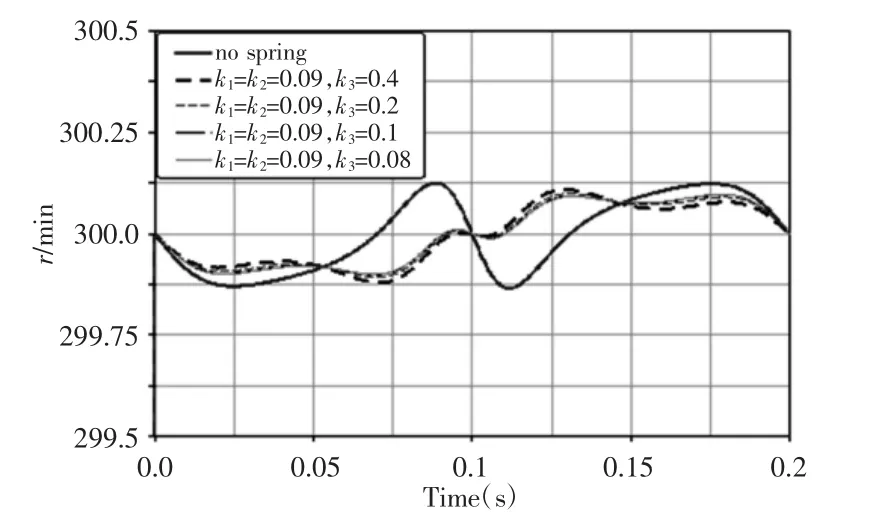
圖6 k1=k2=0.09N/mm 保持不變,k3 取不同值時轉速的變化曲線Fig.6 The Speed Variation Curves When k1=k2=0.09N/mm Remains Unchanged,and k3 Takes Different Values

圖7 k1=k2=0.08N/mm 保持不變,k3 取不同值時轉速的變化曲線Fig.7 The Speed Variation Curves When k1=k2=0.08 N/mm Remains Unchanged,and k3 Takes Different Values
從圖7 中可以看出,電機的轉速波動變化曲線可以看出,當k1=k2=0.08N/mm,k3分別為 1N/mm、0.8N/mm、0.6N/mm、0.4N/mm、0.2N/mm、0.1N/mm 時,電機轉速的最大值分別為300.0969r/min、300.1236r/min、300.1116r/min、300.1002r/min、300.0927r/min,電機轉速的最小值分別為299.8993r/min、299.8673r/min、299.8794r/min、299.8911r/min、299.9022r/min、299.8988r/min。轉速波動大小分別為 0.1976r/min、0.2563r/min、0.2322r/min、0.2091r/min、0.190 5r/min、0.1995r/min。從中可以看出去,當k1=k2=0.08N/mm,k3=0.2N/mm時,電機的轉速波動最小,為0.1905r/min。
比較以上三種組合中轉速波動的最小值0.2157r/min、0.1976r/min、0.1905r/min。可以得到,在翅翼兩側安裝彈簧和在系統頂部同時安裝彈簧的各種彈簧剛度組合中,電機轉速波動的最小值為0.1905r/min,此時對應的彈簧剛度值為k1=k2=0.08N/mm,k3=0.2N/mm。
3.5 全構型比較

圖8 四種構型電機轉速最小波動變化曲線比較Fig.8 Comparison of Minimum Fluctuation Curves of Four Configurations
由構型二和構型一、構型三和構型一、構型四和構型一的比較分析可得,三種增加柔性裝置的構型均可以在一定程度上減小電機的轉速波動。為了得到究竟何種構型可以最大限度地減小電機的轉速波動,我們分別將三種構型中電機轉速波動最小時的彈簧剛度值提取出來進行比較,得到電機的轉速變化曲線,如圖8所示。

表3 四種構型電機轉速最小波動變化情況Tab.3 Minimum Fluctuation of Rotational Speed of Four Configurations
從以上四種構型的轉速波動變化曲線和表3 進行比較分析可得,構型三,即在系統頂部安裝彈簧時,電機的轉速波動最小,相比于未安裝彈簧的構型,轉速波動減小的百分比為38.57%。
4 振動沖擊力對比分析
轉速波動的變化會直接影響撲動機構運動過程中的沖擊力。對于恒定轉速過程中的沖擊力變化作者于之前的研究過程中已做過分析[23],但是在恒定電壓條件下,電機轉速的波動必然導致各運動副處的沖擊力與恒定轉速條件下的沖擊力有所不同。為此在恒定電壓條件下進行著重分析。由前面的仿真分析得到了各構型中轉速波動最小時的彈簧剛度值,為了驗證各構型沖擊力的變化情況,我們對各運動副處的振動沖擊力進行了仿真分析,如圖9~圖11 所示。

圖9 構型一各運動副所受沖擊力Fig.9 The Impact Force of Configuration One
由上面的仿真分析可得,當給系統增加柔性彈簧后可以減小電機的轉速波動。為了驗證轉速波動的減小是否可以減小系統中各運動副處的振動與沖擊,我們對各運動副在一個運轉周期內的沖擊力進行仿真分析,如圖9 所示。其中JOINT_1 為電機與曲柄之間的旋轉副,JOINT_2 為曲柄與連桿之間的旋轉副,JOINT_3 為連桿與豎直方向運動滑塊之間的旋轉副,JOINT_4、JOINT_5 分別為左、右翅翼與豎直方向運動的滑塊之間的旋轉副,JOINT_6、JOINT_7 分別為左、右翅翼與水平方向運動的滑塊之間的旋轉副。
從圖中分析可得,運動副JOINT_1 與JOINT_2 處所受到的沖擊力相比于其它運動副來說較大,因此我們將四種構型中轉速波動最小時受到沖擊力較大的運動副JOINT_1 與JOINT_2在一個周期內的變化曲線進行比較,以分析得到沖擊力最小的構型。
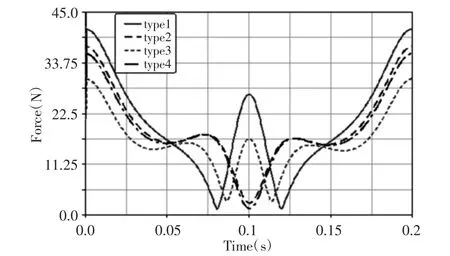
圖10 四種構型中運動副JOINT_1 受到的沖擊力變化曲線Fig.10 The Impact Force Variation Curves of JOINT_1 in Four Configurations
從圖10 四種構型中運動副JOINT_1 受到的沖擊力變化曲線可以得到,構型一、構型二、構型三、構型四運動副JOINT_1 受到的沖擊力的最大值分別為 41.3491N、37.4575N、30.2807N、35.8763N。因此可以得到構型三,即在系統頂部安裝彈簧時運動副受到的沖擊力最小,為30.2807N。
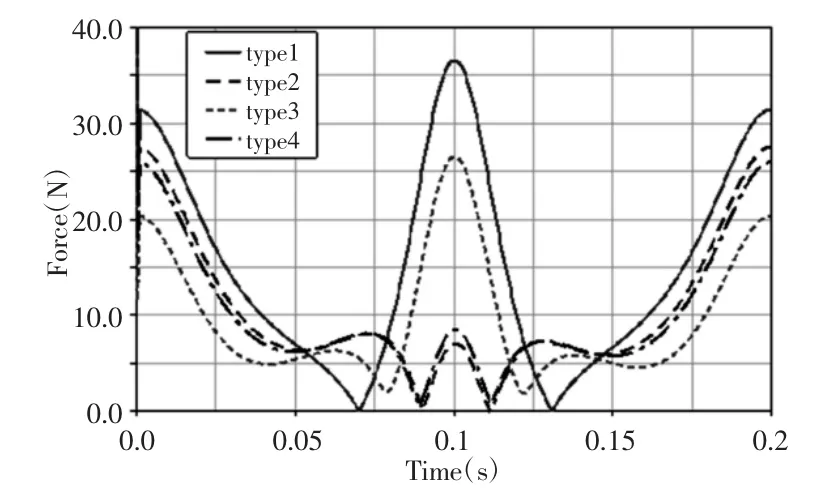
圖11 四種構型中運動副JOINT_2 受到的沖擊力變化曲線Fig.11 The Impact Force Variation Curves of JOINT_2 in Four Configurations
從圖11 四種構型中運動副JOINT_2 受到的沖擊力變化曲線可以得到,構型一、構型二、構型三、構型四運動副JOINT_2 受到的沖擊力的最大值分別為 36.6268N、27.6206N、26.5691N、26.0394N。因此可以得到構型三,即在系統頂部安裝彈簧時運動副受到的沖擊力最小,為26.0394N。
5 結論
對四種構型撲翼驅動機構中的電機轉速在恒定電壓條件下進行了對比分析,發現安裝柔性彈簧的構型,能夠有效減小撲動機構在運轉過程中電機的轉速波動大小。同時對安裝柔性彈簧系統的三種構型進行進一步分析,得出能夠使電機轉速波動最小的構型為構型三,即在系統頂部安裝柔性彈簧可以最大限度地減小電機的轉速波動,此時電機的轉速波動最小,為0.1602r/min。
其次對三種安裝柔性彈簧的構型轉速波動最小時各運動副的沖擊力與未安裝柔性彈簧的構型進行了對比分析,發現轉速波動最小時,各運動副處的沖擊力明顯減小,進一步分析得到四種構型中的構型三運動副處的沖擊力最小,此時運動副JOINT_1受到的最小沖擊力為30.2807 N,JOINT_2 受到的最小沖擊力為26.0394 N,這與轉速波動最小的構型對應。
總之,在撲翼驅動系統中安裝柔性彈簧不僅可以減小電機的轉速波動,使得電機不致因為過載而受到損害,而且也可以減小機構中各運動副的沖擊力,延長機構的使用壽命,降低運行過程中的振動與沖擊,達到減震和較低噪聲的目的,提高了飛行器在戰場環境下的生存率,使之更加符合實際應用環境的需要。
