壓電自供電紅外遙控器設計*
2021-01-29 07:37:40王立強陳晨曦
科技與創新 2021年2期
王立強,陳晨曦,辛 峰
(武漢理工大學自動化學院,湖北 武漢 430070)
1 研究背景與意義
1880 年,法國居里兄弟發現壓電效應,即某些電介質在沿一定方向上受到外力的作用而變形時,其內部產生極化現象,同時在它的兩個相對表面上出現正負相反的電荷;當外力去掉后,它又會恢復到不帶電的狀態,這些物質也被稱為壓電材料。壓電效應對于能量的轉換具有重要意義,因此也被應用到諸多領域。日常生活中的打火機、煤氣點火器、汽車胎壓報警器、雷達系統的壓電陀螺等都用到了壓電材料的壓電效應。而近幾年關于壓電發電技術的創新也越來越多,其中利用壓電材料的正壓電效應將機械能轉化為電能為微電子設備供電是應用壓電技術發電的重要課題。
遙控器在生活中是非常常見的,在工業領域也應用較廣。目前大多數遙控器主要由電池供電。但干電池的生產和廢棄一直是資源浪費和環境污染的重要原因。據不完全統計,目前國內家電遙控器每年消耗干電池28 億節,一節廢棄的干電池會污染1 m3土地和12 m3水。現如今人們環保意識逐漸增強,對于綠色能源的研究也逐漸深入。尋找一種替代電池的綠色電源為遙控器供能已成為一個重要研究方向。本研究將壓電發電技術應用于遙控器,設計一種壓電式自供電紅外遙控器,對環保和能源問題具有重要意義。
2 壓電發電模塊的研究設計
2.1 壓電振子結構設計
壓電發電模塊的發電量是壓電自供電無線遙控器能否發射信號的關鍵,主要取決于壓電材料、壓電振子結構和表面受力等。目前市面上主要采用PZT 即鋯鈦酸鉛壓電陶瓷片作為壓電材料,通過比較選擇各項參數都較為均衡的PZT-5A,且擬采用性能突出、合適安裝的矩形雙晶壓電陶瓷片。因此,決定壓電發電模塊發電效率的主要因素是壓電振子的結構。
關于壓電振子,其結構模型主要可簡化為簡支梁和懸臂梁兩種,為適應自供電紅外遙控器的供能需要,需要從理論和實驗兩方面來進行壓電振子結構的選擇。通過力學及壓電學的相關知識和歐拉伯努利法,分別對懸臂梁、簡支梁兩種結構進行理論建模和仿真,分析其開路電壓與產生的電能。
懸臂梁模型如圖1 所示。
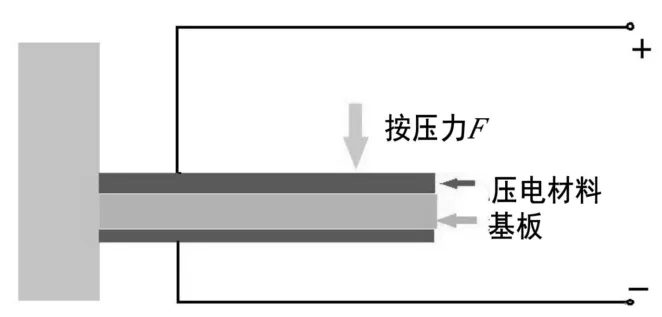
圖1 懸臂梁結構模型
通過對懸臂梁模型進行建模和仿真,可以得出其發電量與壓電振子受力點的位移增加量成正相關。當壓電振子所受應力過大,直至最大工作應力大于壓電材料的極限應力,會導致材料脆性失效。因此懸臂梁壓電振子最大應力出現在其固定端的上表面邊緣。
簡支梁結構模型如圖2 所示。
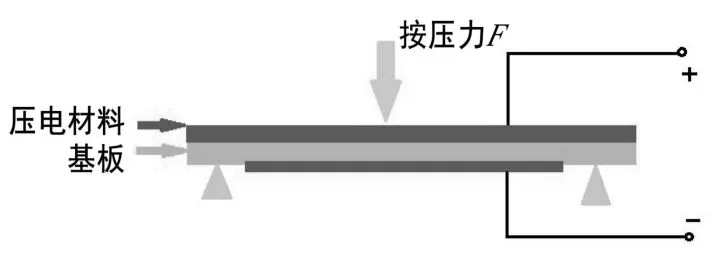
圖2 簡支梁結構模型
通過對結構進行模擬仿真可知,壓電振子的最大工作應力受力點在上表面的中點,與懸臂梁模型相比,簡支梁能夠布置更多按鍵,適合用于多鍵壓電供電遙控器。但由于簡支梁結構壓電振子的按壓變化量小于懸臂梁結構,因此其發電量也小于懸臂梁結構,因此懸臂梁模型宜作為遙控器的供能裝置。但由于懸臂梁結構的最大應力與外力或末端位移的增加量成正相關,當施加的壓力過猛,致使受力點的位移增加沖量過大,會導致材料的損壞失效。因此,在懸臂梁結構中還需要加入限位裝置。由前面對懸臂梁結構的仿真模擬可以得到,在同一橫截面內,固定端所受的應力最大,隨著位移x的增加應力減小,直到自由端應力減為0;當應力減小,壓電模塊的發電功率也減小。因此擬設計一種等應力懸臂梁結構,使其應力大小不隨位移變化而變化。其結構模型如圖3 所示。
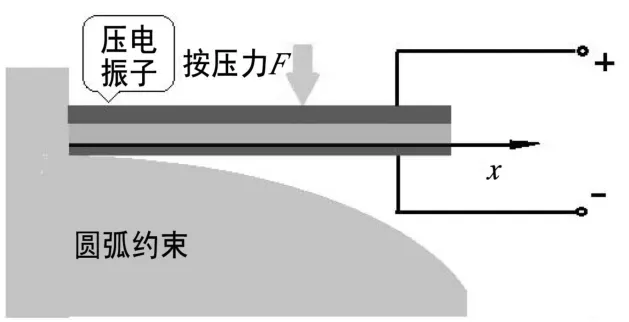
圖3 等應力懸臂梁結構模型
等應力懸臂梁結構在懸臂梁結構基礎上增加了圓弧約束裝置,由彈性材料制作而成。當壓電振子自由端受到壓力F時,振子沿約束塊表面彎曲。通過仿真模擬,在同一橫截面內,壓電振子各處的應力為常值,即受力端與固定端的應力大小相等,這樣既能夠保證壓電模塊的發電量,又能避免因為不可控的外力導致壓電材料脆性失效。
2.2 功率可行性分析
為使壓電發電裝置能更方便地為遙控器供電,發電裝置每次受到激勵所產生的電能需大于等于每次發射紅外信號所需要的能量,這也是壓電自供電遙控器可行性的關鍵所在。
2.2.1 壓電模塊發電功率分析
根據正壓電效應,當懸臂梁壓電振子自由端受外力作用而產生彎曲變形時,其表面便有電荷生成。壓電物體所受應力與表面產生的電荷及形成的開路電壓的關系可表示為:

式(1)中:a、b和c分別為壓電振子的長度、寬度和厚度;F為所受應力;g 為壓電電壓常數;δ為電壓振子的剛度和自由端形變量。
由式(1)可知,發電量與振子的長、寬、厚度均有關系,而在遙控器內,壓電振子的尺寸和形變量不宜過大。據以往實驗研究,當振子尺寸為20 mm×20 mm×20 mm 時,一次脈沖激勵可產生1.3 mJ 電能,信號傳輸距離達15 m 以上。而本設計采用的等應力壓電發電裝置因其壓電振子將沿圓弧約束塊彎曲,受力端與固定端應力大小相等,使得發電能力有所提高,因此其實際供電能力將大于上述1.3 mJ 電能。
2.2.2 遙控器耗電功率分析
以常見數字電視機遙控器為例,其電路框圖如圖4 所示。

圖4 電視機遙控器電路框圖
各部分電路分別消耗功率約占總功率10%、30%、10%、50%。電路電源電壓U=3 V,工作電流I=40 mA,工作周期為108 ms。則可以計算功率及總能量消耗分別為:

據以上對壓電發電功率及普通電池供電遙控器功率的分析,經優化的壓電發電系統可以對目前常見的無線發射系統供電。而本項目具有更低功耗的無線發射系統,更保障了自供電的可靠性和實用性。
3 無線發射與信號接收系統
目前的壓電裝置主要用于壓電傳感器,大部分壓電裝置的輸出功率還不足以驅動現有的商品遙控器。如果要提高壓電紅外遙控器的實用性和轉化效率,需要提高壓電發電模塊的供電能力并且降低紅外信號發射的功耗。本文所設計的發射裝置需在無任何外界電源情況下,可以通過壓電片自發電、供電和無線發射同步進行。從實際使用的角度出發,優化了無線發射系統、信號接收系統,為實物研制提供了理論依據。
3.1 無線信號發射模塊
紅外信號發射模塊主要由整流部分、控制器部分,紅外發射部分組成。整流部分將壓電模塊產生的電能轉化為平穩直流電,控制部分產生信號,發射部分實現信號傳輸。
3.1.1 電源轉接部分
整流電路如圖5 所示。
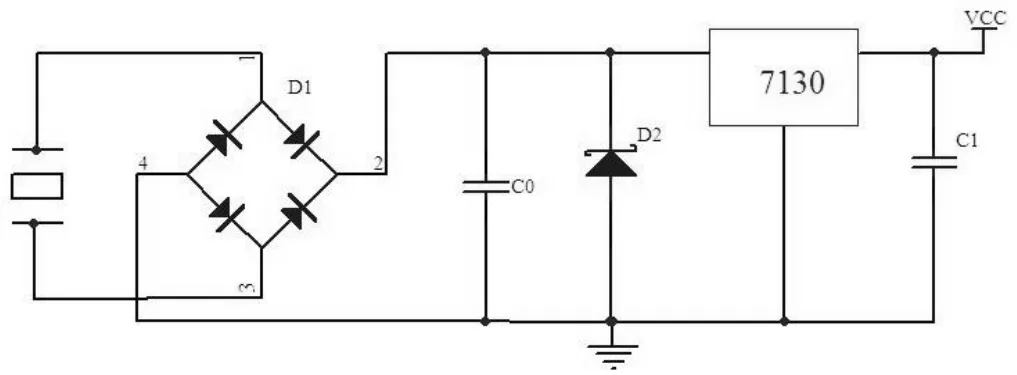
圖5 整流電路
壓電效應產生的瞬間電流具有電壓高、電流大、交流電的特點,無法直接為控制部分供能,可通過整流電路轉換為相對平穩的直流電。整流電路整個電路有整流橋D1、濾波器C0 和C1、穩壓二極管D2、三端穩壓塊7130。C0、C1為濾波電容,使輸入到7130 穩壓模塊的直流電更為平穩,穩壓二極管對7130 起保護作用。
3.1.2 控制部分
控制部分是整個裝置主要的能耗部分,因為壓電效應產生的電量有限,還要驅動芯片進行編譯,所以要求選擇低功耗的控制器。本設計選擇TI 公司的MSP430F1101A 單片機作為微控制器,F05P 作為無線發射模塊。
控制部分電路如圖6 所示。
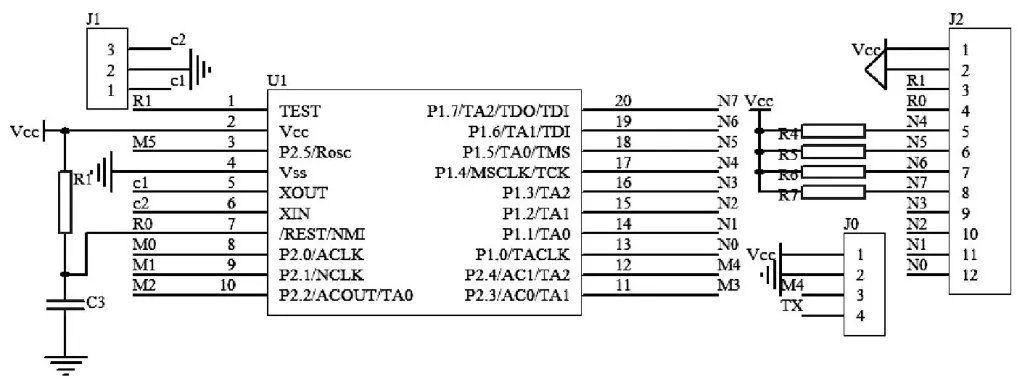
圖6 控制部分電路圖
MSP430 系列具有超低功耗,工作電壓為1.8~3.6 V,有高達60 KB 的閃存和各種高性能模擬及智能數字外設,可以應用于本控制電路。
控制部分電路圖如圖7 所示,R1=120 kΩ,電容C3=0.15 μF,電阻R1 和電容C3 組成復位電路。
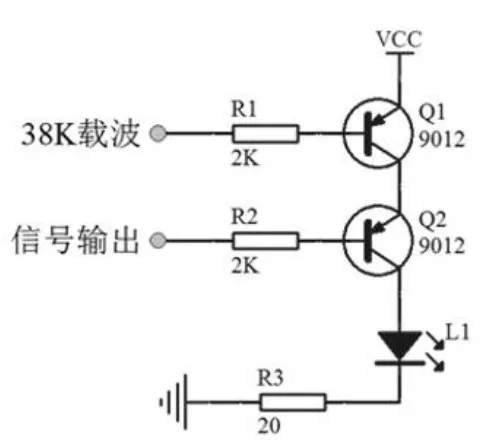
圖7 紅外發射原理圖
3.1.3 紅外發射部分
紅外發射器具有低功率,適用范圍廣,傳輸信號效率高的特點。設計采用的是TSAL6200 型紅外發射管,可以適用于多種遙控器。紅外發射的主要原理是將信號通過編碼,經三極管Q1、Q2 放大調變,再將該電信號經紅外發射管(940 nm 波長)轉變為光信號發射出去。
3.2 信號接收模塊
信號接收系統如圖8 所示。
紅外接收頭內部主要由光電二極管與紅外接收芯片構成,其主要原理是光電二極管接收到紅外發射管發射出的光信號后轉換為電信號,該電信號輸入到接收芯片內部經過放大、增益、濾波、解調、整形還原后,還原紅外發射器給出的原始編碼,再通過信號輸出腳輸入到后面的代碼識別電路。
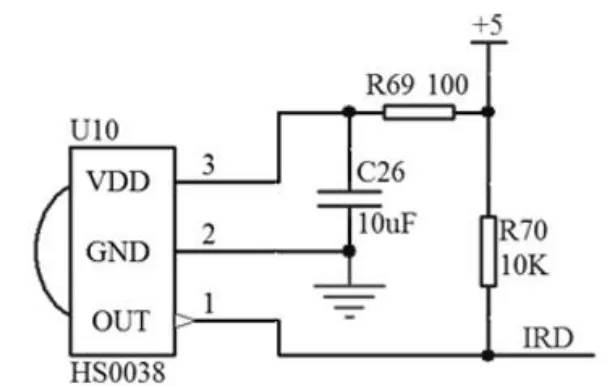
圖8 信號接收系統
4 結論與展望
4.1 結論
本研究通過理論分析和實驗驗證,創新性將壓電技術應用于紅外遙控器,實現家用遙控器的無電池供電。通過設計新型懸臂梁壓電發電裝置和無線發射系統,將手指按壓遙控器時產生的機械勢能轉化為電能,在瞬間驅動發射電路完成信號的發射,以此方式取代電池供電。將壓電自供電技術應用在紅外遙控器,能夠使裝置結構更簡單,操作更方便,并且無電磁干擾,具備可靠性與實用性。
4.2 展望
按市面上普遍使用的遙控器七號電池電能計算,中國每年家電遙控器約消耗28 億節,以每節電池能量值為800 mA·h 計算,工作電壓為1.5 V,則年耗電量為:W=2.8×109×1.5×800×10-3=3.36×106kW·h。
按照每戶家庭平均每月用電80 kW·h計算,相當于3 500戶中國家庭全年的用電量。因此,若能制作并全面推廣和使用壓電自供電無線遙控器,能極大節約能源和保護環境,因而本課題的研究也具有廣泛的市場價值和實用價值。
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
現代企業(2015年9期)2015-02-28 18:56:50
