一種用于海洋環境立體監測的數據傳輸系統
2021-02-03 07:43:42姚钘,李云,劉瓊
數字通信世界 2021年1期
姚 钘,李 云,劉 瓊
(1.桂林航天工業學院電子信息與自動化學院,廣西 桂林 541004;2.國營長虹機械廠,廣西 桂林 541004)
0 引言
海洋大約占據著地球面積的71%;而其中的水更是占據總水量的97%。它是人類賴以生存的重要組成部分,是社會可持續發展的寶貴財富[1]。近年來國家對海洋的關注度越來越高,《中國海洋經濟發展報告2020》中指出“2019年,我國海洋生產總值超過8.9萬億元,海洋經濟對國民經濟增長的貢獻率達到9.1%”[2],海洋在國家經濟社會發展中的地位和作用日益突出。然而仍有部分人只注重短期的經濟發展,以犧牲海洋生態環境為代價,“鼓了自己的錢袋,毀了美麗的生態”,海洋環境的破壞程度令人觸目驚心,海洋環境的實時監測迫在眉睫。2017年5月4日,國家發展改革委、海洋局聯合發布《全國海洋經濟發展“十三五”規劃》,規劃中明確指出要提升海洋公共服務業,推進高新信息技術與海洋產業深度融合,加強海洋信息化體系建設,推進國家海洋環境實時在線監控系統和海外觀(監)測站點建設,逐步形成全球海洋立體觀(監)測系統,加強對海洋生態的觀測研究[3]。而目前現行的海洋環境監測系統大都以浮標為主,這類系統存在著較大的缺陷,例如部分系統中的浮標采集后僅能存儲在本地,而后等待人力回收進行處理,遺失較多且人力成本較高;部分浮標雖配備了BD/GPS或4G/5G 等回傳通信模塊,但在遠海區域信號質量較差,往往無法回傳造成失效,如何解決此類問題成為現下需要解決的關鍵任務,本文介紹的數據傳輸系統正是在上述背景下應運而生的。
1 設計思路
本系統是以現有海洋浮標系統為基礎進行的升級改造,以形成“天 -地-海”一體化的海洋環境立體監測能力的數據傳輸系統,響應國家建設全球海洋立體監測系統的規劃目標。該系統主要分為四大部分:浮標子系統(若干遠海浮標 +若干近海浮標)、水下無人航行器、水面無人船、地面控制站。浮標子系統在原有浮標系統新增水聲通信鏈路,組成浮標數據網,由于遠海浮標信號質量較差,因而通過浮標組網將部分監測數據傳輸至近海浮標,而近海浮標則通過4G 移動基站(或北斗衛星報文系統,優先4G 網絡)與地面控制站通信;由于浮標間隔距離問題,浮標間監測存在空白,水下無人航行器和水面無人船定期進行固定航跡巡游,以此類機動平臺解決監測存在空白區域的問題,同時以類似“蜜蜂采蜜”方式采集浮標的大數據量信息,解決水下生態圖片、視頻等數據采集問題;地面控制站負責監測數據的接收和處理以及相關控制指令的下發,從而完成人機系統的閉環。本系統的整體架構圖如圖1所示。
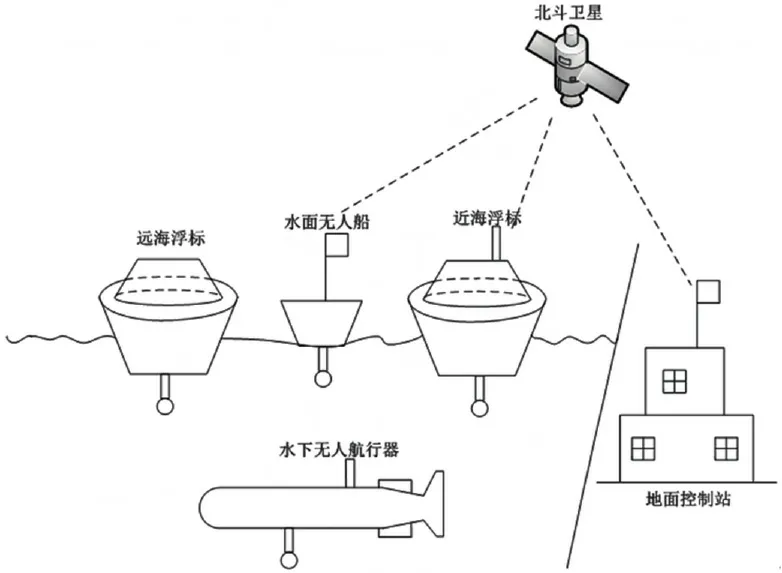
圖1 數據傳輸系統整體架構圖
2 技術實現方案
本系統的組成如上節所述,主要由四個部分組成:浮標子系統、水下無人航行器、水面無人船、地面控制站,其中人員是與地面控制站進行交互,因此,以地面控制站為主體進行本系統的工作過程劃分,主要分為下發指令和收集數據兩類任務。
下發指令的工作過程:地面控制站(控制指令源)根據信號質量情況選擇使用4G 移動基站或北斗衛星將控制指令發送至近海浮標,近海浮標轉發該控制指令至整個浮標網,當該消息包 ID 與某浮標相符時則該浮標執行指令,從而達到控制的目的;地面控制站對于水下無人航行器的控制是由近海浮標接收后通過浮標網轉換為水聲信號發送,當消息ID 與水下無人航行器設定 ID一致時,水下無人航行器則執行該條指令;水面無人船與地面控制站的通信有兩類途徑:一類與水下無人航行器類似,一類是通過4G 移動基站或北斗衛星傳輸控制指令,這類方法僅在近海適用。上述下發指令工作過程的信號流向圖如圖 2所示。
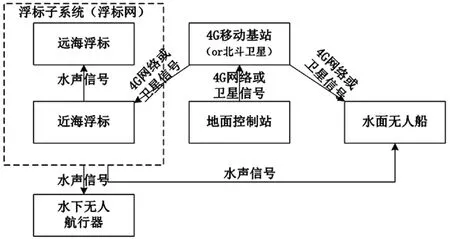
圖2 下發指令工作過程的信號流向圖
采集海洋環境數據主要由浮標子系統負責,這其中包括小數據量的水質參數等數據,大數據量的水下生態圖片視頻等數據,針對這兩類數據系統采取兩類不同的方法進行收集。具體收集數據工作過程的信號流向圖如圖3所示。
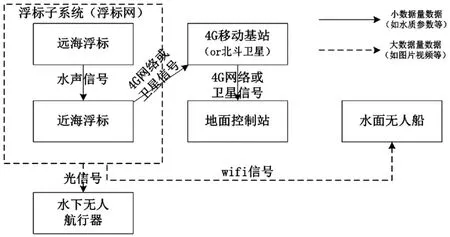
圖3 收集數據工作過程的信號流向圖
收集小數據量數據(水質參數等)的工作過程:浮標子系統中的遠海浮標和近海浮標共同負責收集數據,近海浮標直接通過4G 移動基站或者北斗衛星將數據送回至地面控制站,而遠海浮標由于4G 等信號較差無法直接將數據送回,轉而通過水聲信號借助浮標網轉發至近海浮標后,使用4G 移動基站或者北斗衛星將數據送回至地面控制站,以此實現收集數據的目的,至此所有浮標采集的小數據量數據均能傳回地面控制站。
收集大數據量數據(圖片視頻等)的工作過程:近海浮標可通過4G 移動基站直接將大數據量數據傳回,而遠海浮標由于水聲信號的速率限制,僅幾kbps,無法直接傳回大數據量數據。因而使用水面無人船、水下無人航行器按照“蜜蜂采蜜”的原理,使得水面無人船按照固定航線定點航行至遠海浮標附近使用 Wi-Fi 信號接收遠海浮標數據存儲至內部SD 卡后返回,同樣水下無人航行器至遠海浮標附近后利用光信號接收該浮標數據存儲至內部 SD 卡后返回,至此即可完成收集所有浮標采集的大數據量數據。
通過上述的流程即可實現對海洋環境的立體監測,而用以支撐此流程的組成部分具體硬件實現方案如下所述(以浮標子系統為例)。
浮標子系統主要分為兩類:遠海浮標和近海浮標,遠海浮標的硬件方案較近海相對簡單,下面分別對這兩類的硬件結構進行介紹。
遠海浮標硬件結構包括 STM32F405模塊、水聲通信模塊、 Wi-Fi 模塊、 CTD 傳感器、相機、光通信模塊、 SD卡、電源轉換八個部分。其中電源轉換將浮標電源 16 V 轉換為系統所需的 5 V、3.3 V、12 V 電壓,供給其他七個部分使用; STM32F405模塊作為主控,與水聲通信模塊通過 UART 接口連接,用于將相關信息轉換成水聲信號傳輸;與 CTD 傳感器通過 UART 接口連接,相機通過 I2C 接口連接,用于獲取水質參數及水下生態圖片視頻等;與 Wi-Fi 模塊、光通信模塊均分別通過 SPI 接口連接,用于將相關信息轉換無線信號、光信號傳輸;與 SD 卡通過SDIO 接口連接,用于存儲CTD 傳感器、相機產生的水質相關數據。遠海浮標的硬件結構圖如圖4所示。
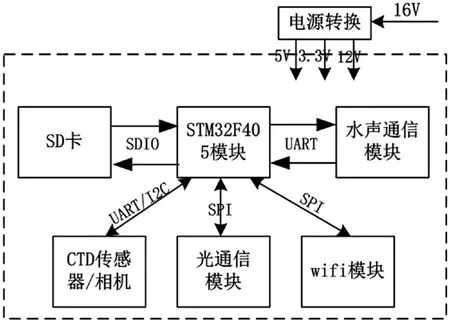
圖4 遠海浮標硬件結構圖
近海浮標硬件結構與遠海浮標類似,僅比其多2個模塊:4G 通信模塊和北斗模塊,這兩個模塊均通過UART 接口與STM32F405主控模塊連接,用于將水質參數等小數據量信息轉發至地面控制站,也將地面控制站的相關控制指令傳至STM32F405主控模塊進行后續處理。近海浮標的硬件結構圖如圖5所示。
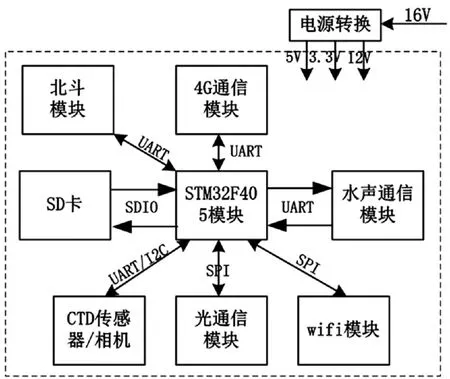
圖5 近海浮標硬件結構圖
3 結束語
習總書記曾在調研時指出“發展海洋經濟、海洋科研是推動強國戰略重要方面,一定要抓好,關鍵的技術要靠自主研發,海洋經濟的發展前途無量”[4]。作為對于海洋經濟有著重要影響力的海洋環境,一種對其進行實時而準確監測的系統將是后續發展的必然需要。本文介紹的數據傳輸系統正在在此領域的一次探索,主要從系統總體設計思路以及各組成部分的實現方案兩個方面分別進行了詳述,其數據傳輸實時性較現有系統有所提升且使用方便,同時可對海事部門布放的原有浮標系統進行升級改造,因而成本相對較低,有較強的實際應用價值。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
