四柱式力傳感器固有頻率提升研究
2021-02-11 04:15:02呂浩然趙印明王敏寧黎永前
計測技術 2021年6期
呂浩然,趙印明,王敏寧,黎永前
(1.航空工業北京長城計量測試技術研究所,北京 100095;2.西北工業大學空天微納系統教育部重點實驗室,陜西 西安 710072)
0 引言
目前,應用于工程的傳感器主要有電阻應變式傳感器、壓電式力傳感器和壓阻式力傳感器。電阻應變式傳感器之中的四柱式電阻應變式力傳感器因測量原理的不同,相較其它力學傳感器具有優越的靜態性能,但動態性能較差。研究與提升四柱式電阻應變式力傳感器的動態性能成為其發展與應用中的關鍵技術問題。
國外對于力傳感器動態特性的研究多集中于慣性補償和濾波消噪方面[1-8],國內則集中在動態測試中的噪聲處理、傳感器的動態補償和解耦方面[9-14],力傳感器自身結構對固有頻率的影響以及改進方法還未形成系統性的研究,四柱式傳感器作為一種新式結構的力傳感器,相關研究則更少。傳感器最重要的動態特性指標是固有頻率,它是研究與優化其他動態性能參數的基礎。本文對四柱式傳感器固有頻率進行研究與優化,開展四柱式傳感器的固有頻率與結構參數的關系分析與研究,提升應變式傳感器固有頻率,進而提升傳感器的動態性能。
1 固有頻率理論研究
1.1 固有頻率理論
固有頻率理論包含兩點重要結論[15-17],這兩點結論與傳感器剛度分布和質量分布結合,是固有頻率模型建立的重要理論依據。
1)固有頻率是物體的固有屬性,由物體自身的性質(如質量、材質等)決定,與外界條件(如受力狀態、約束狀態以及空間狀態等)無關。
2)固有頻率僅與物體的剛度分布與質量分布有關,用公式表示為

式中:ω為物體的固有頻率,rad/s;kp為剛度分布,N/m;mp為質量分布,kg。
1.2 傳感器建模分析
四柱式傳感器的結構外形如圖1所示,四根立柱與上下端面為一體化結構,下端面作為固定端受到約束,上端面作為自由端受力。從形式上,每根立柱都可以簡化為一個一端簡支、一端自由的梁,可將其視為一個獨立的測量單位[1]。
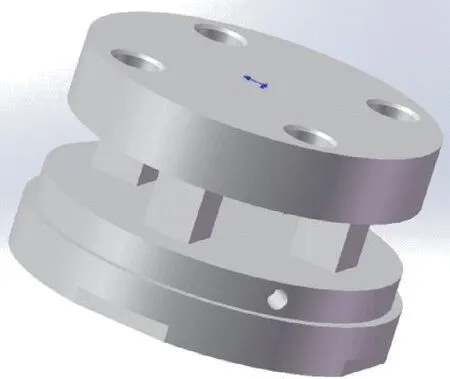
圖1 四柱式傳感器外形示意圖Fig.1 Outline diagram of four-column sensor
研究傳感器的測量原理可知,外部載荷傳遞到彈性體上的最終結構為貼片的四根立柱,四柱式彈性體的動態性能主要與四根立柱的動態性能有關。
分析圖2所示的傳感器的模態仿真結果可知,彈性體下端面不參與頻率響應過程,上端面模態頻率響應復雜且不穩定,均無法作為彈性體固有頻率模型建立的主要對象;而四根立柱模態分析結果顯示其固有頻率響應集中且穩定,對頻率響應分析起主導地位,可作為四柱式傳感器固有頻率模型建立的主要對象。
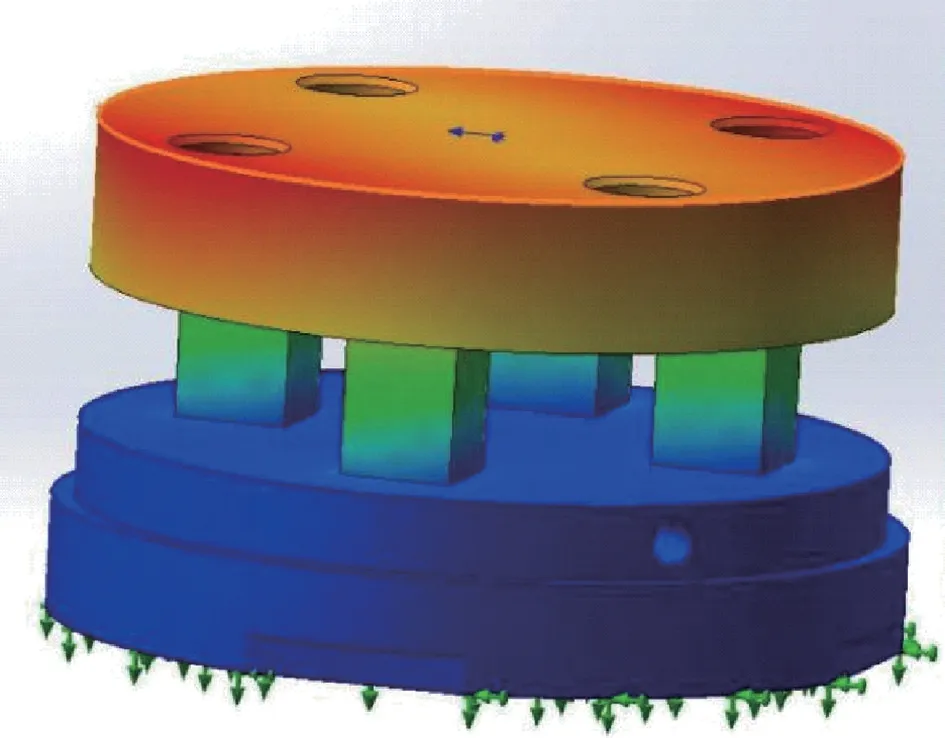
圖2 四柱式傳感器模態頻率分析圖Fig.2 Modal frequency analysis diagram of four-column sensor
綜合上述分析可知,傳感器固有頻率模型建立的主要對象為其四根立柱,最重要的建模步驟為將等效梁模型與傳感器的質量分布與剛度分布分析相結合,得到四柱式傳感器固有頻率模型。
分析四柱式傳感器的質量分布與剛度分布,建立起傳感器整體固有頻率與單立柱等效梁模型的固有頻率的關系。四柱式傳感器的立柱與上下端面為一體化連接,四根立柱相當于彼此“并聯”,增加了其整體剛度。該結構并聯形式為胡克定律中的彈簧串并聯問題的外延范疇[18-20],整體并聯系統的剛度為各子系統的剛度之和[18-20],故可知:彈性體的剛度分布約為每根立柱剛度分布的4倍。由圖2所示的仿真圖像可知,該結論正確。
可將四柱式傳感器的每根立柱視為一個“獨立的傳感器”[1],該形式同樣屬于胡克定律中的并聯系統運動問題外延范疇[18-20],結合傳感器立柱貼片測量的方式,忽略維間微小耦合,假設工作時每根立柱自由振動不受其他立柱的狀態影響,則傳感器整體的質量為每根立柱自身的質量分布。圖2所示的仿真圖像表明,四柱式傳感器的結構形式符合上述理論。
綜合上述剛度分布與質量分布的分析,由固有頻率定義式可知,彈性體整體的固有頻率ωn與每根立柱的固有頻率ω0的關系為

式中:k0為立柱剛度分布,N/m;m0為立柱質量分布,kg,mp=m0。
由式(2)可得傳感器整體的固有頻率約為每根立柱的2倍。
如圖3所示,將沿徑向方向的立柱橫截面邊長參數定義為長度參數l,沿周向方向的邊長參數定義為寬度參數w,垂直于上下端面方向的柱體高度參數定義為高度參數h。
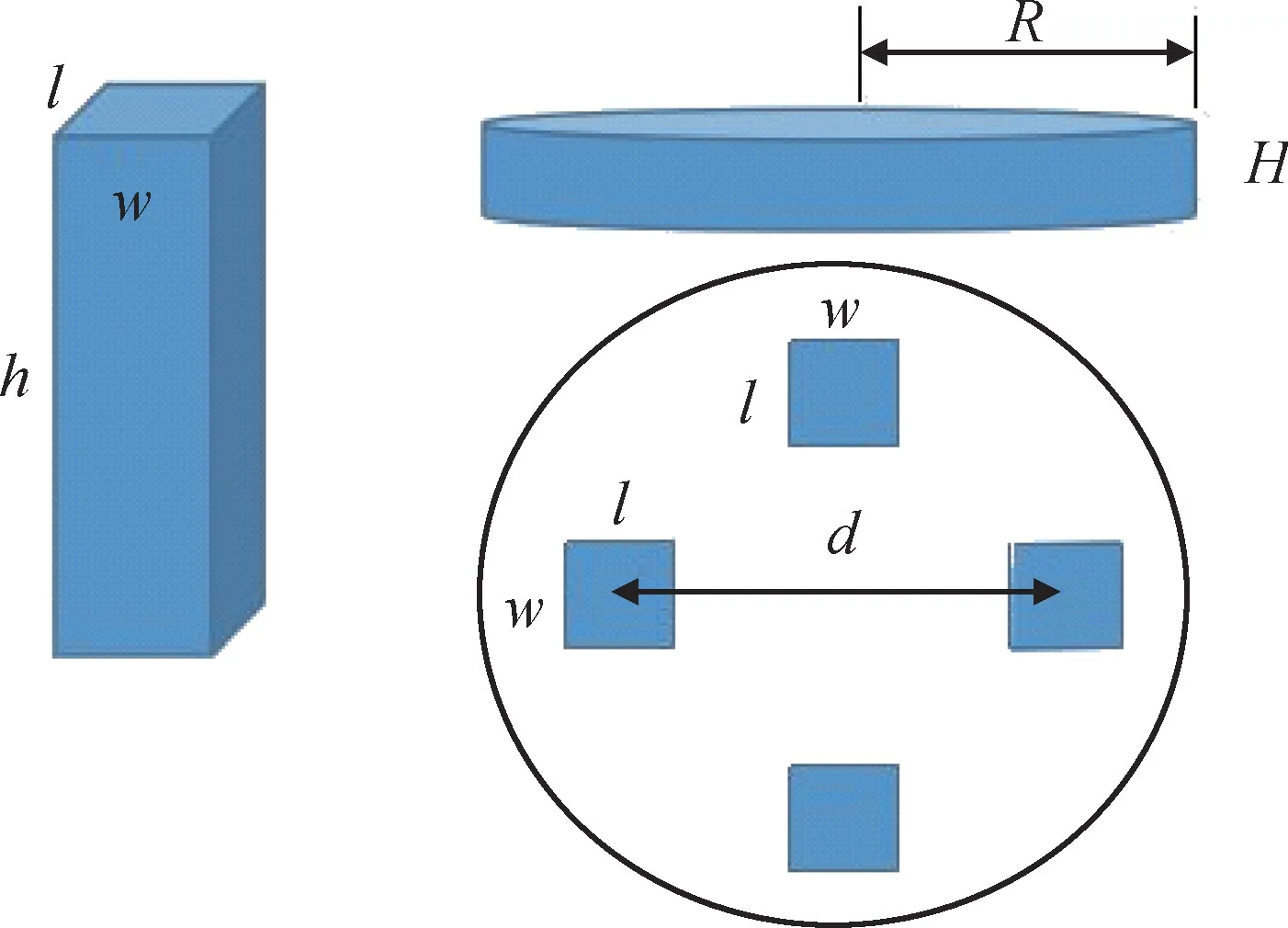
圖3 四柱式傳感器結構示意圖Fig.3 Structure diagram of four-column sensor
建立等效梁模型的固有頻率模型時,參照了胡海昌[21]的變分法研究過程,并應用在四柱式傳感器固有頻率模型的研究中。
線性彈性體在沒有外力作用的情況下作固有振動,設應力分量的振幅為σx,σy與σz,位移分量的振幅為u,v和w,圓周頻率為ω,運動方程為
進行變分法求解可得線性彈性體的各階固有頻率計算式為
式(4)的最小極值與一階固有頻率唯一對應,其極值從小到大依次排列即為物體的各階固有頻率。
在得到了一般線性彈性體的固有頻率公式后,可再對其引入一般線性均勻直梁的約束條件,進而獲得一般線性均勻直梁的固有頻率公式。再通過對其加入相應的等效梁模型的約束條件,最終獲得等效梁模型的固有頻率公式為

由前述結論,彈性體整體的固有頻率約為每根立柱的2倍,將角頻率公式轉化為圓頻率公式,并將截面慣性矩式展開,得到彈性體的固有頻率模型為

式中:f為四柱式傳感器固有頻率,Hz;l為四立柱長度參數,m;w為寬度參數,m;h為高度參數,m;E為材料彈性模量,Pa;ρ為密度,kg/m3。
由式(6)可知,提高四柱式傳感器固有頻率的方法有兩類:改進四柱式傳感器的結構參數和改進制成傳感器材料參數,其中第一類方法為本研究的重要內容,第二類方法屬于其他學科范疇,不作為本文研究內容。
2 仿真研究
為驗證理論研究結論的正確性即(增大四立柱長度參數l,增大四立柱寬度參數w,減小四立柱高度參數h可使四柱式傳感器固有頻率提升,反之亦然),通過Solidworks有限元仿真軟件對四柱式傳感器固有頻率與其結構參數的關系進行分析,整個仿真工作對下端面進行固定約束,各結構參數變化時,不會出現柱體相交接觸等問題。
2.1 仿真研究對象
以某型四柱式傳感器的四柱式彈性體為仿真研究對象,其初始結構尺寸(四立柱的長×寬×高)為15×15×20 mm,上端面尺寸為直徑105 mm,厚度H=20 mm。四立柱間距d=65 mm。
四柱式彈性體的材料為合金材料40GrNiMoA,該材料具有低滯彈性與低蠕變特性。其彈性模量E為2.09×1011Pa,密度ρ為7830 kg/m3。
2.2 初始結構仿真
對初始結構的四柱式傳感器固有頻率進行有限元仿真計算,以該仿真結果作為后續仿真研究的對比對象與評價傳感器結構參數改進后固有頻率提升效果的基準。四柱式彈性體固有頻率的仿真結果與其實驗經驗結果相近,如表1所示,并且理論結果與仿真結果間的相對誤差較小,理論模型的研究結論可作為仿真研究的指導。
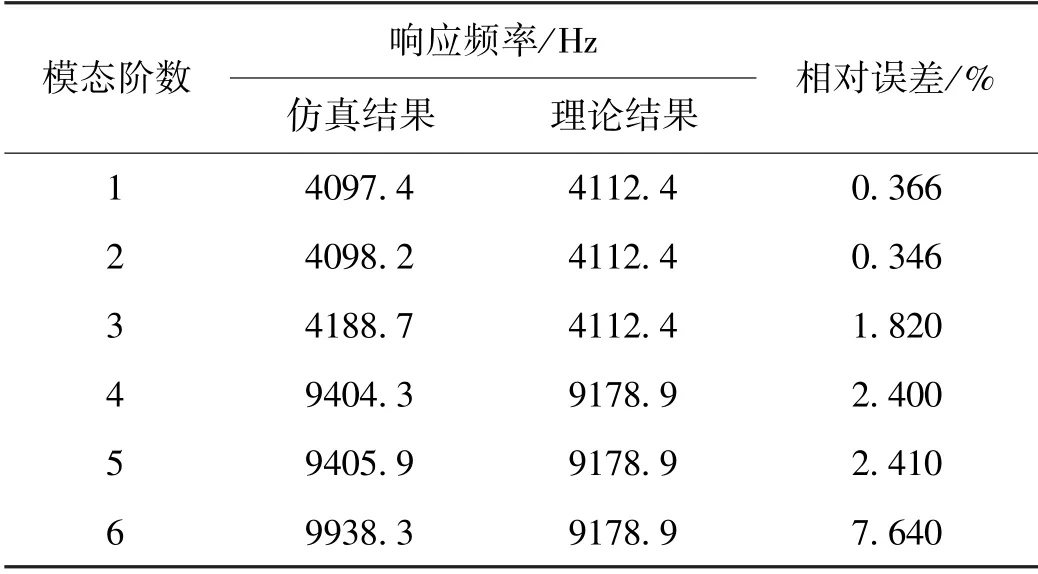
表1 四柱式彈性體各階響應頻率Tab.1 Response frequency of four-column elastomer at each order
2.3 長度參數變化仿真
四柱式彈性體的立柱外形較為簡單,忽略導角類結構,可將其簡化為一根長方形柱體。研究四立柱結構參數改變時其固有頻率變化,應考慮四立柱對稱,對其進行相同的結構參數變化。
對四立柱長度進行變化的方法主要包括內擴和外擴兩類,如圖4所示,保持四立柱內側面位置不變,沿上下端面半徑方向向外增大l,稱為外擴;保持四立柱外側面位置不變,沿上下端面半徑方向向內增大l,稱為內擴。
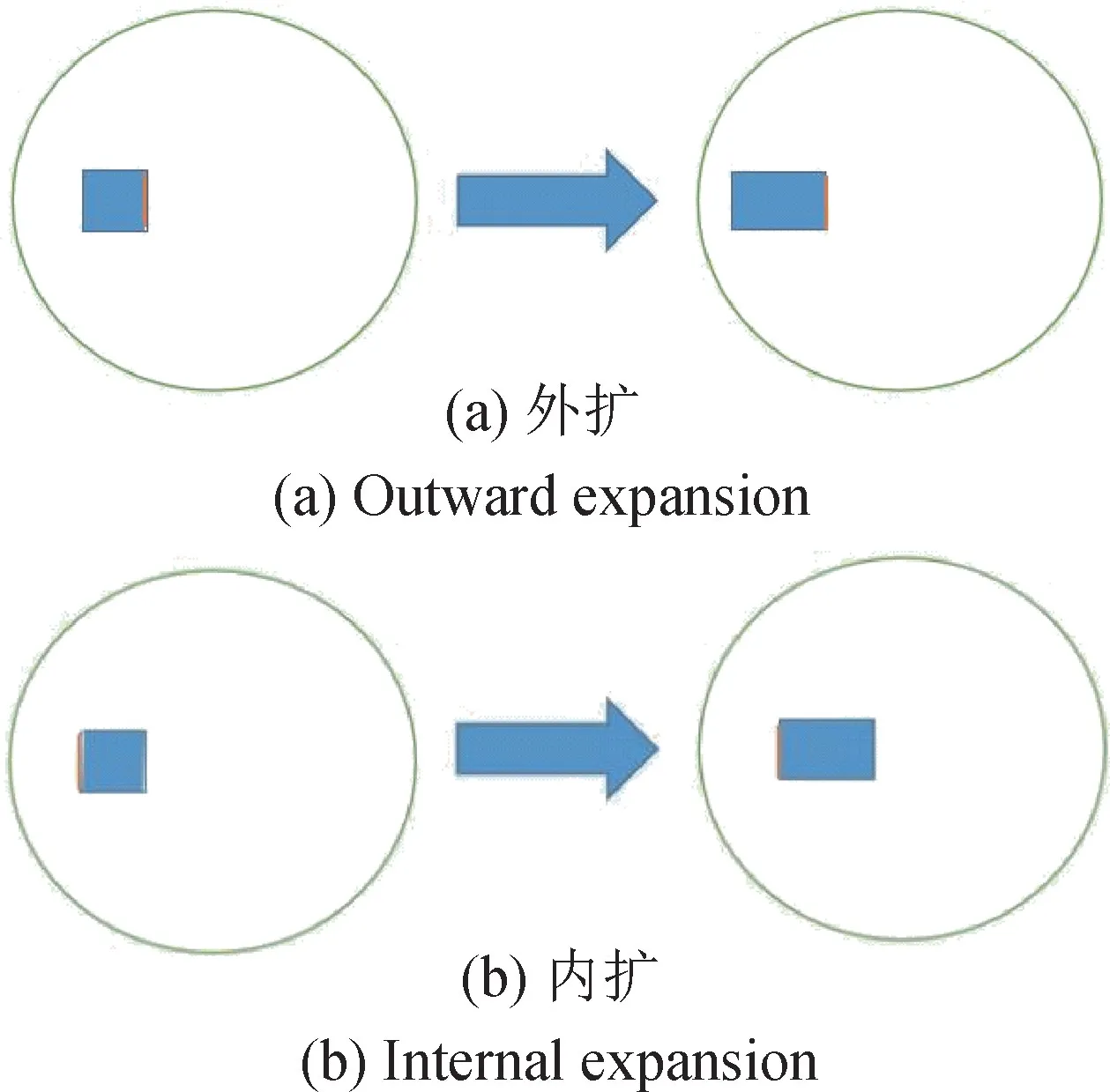
圖4 立柱長度參數變化示意圖Fig.4 Schematic diagram of column length parameter change
為研究外擴及內擴條件下傳感器固有頻率的變化,分別外擴5 mm與10 mm,內擴5,10,15 mm,并在Solidworks仿真軟件中畫出相應結構的四柱式傳感器模型,并對其進行有限元仿真,分析其各階固有頻率。外擴仿真結果見表2。
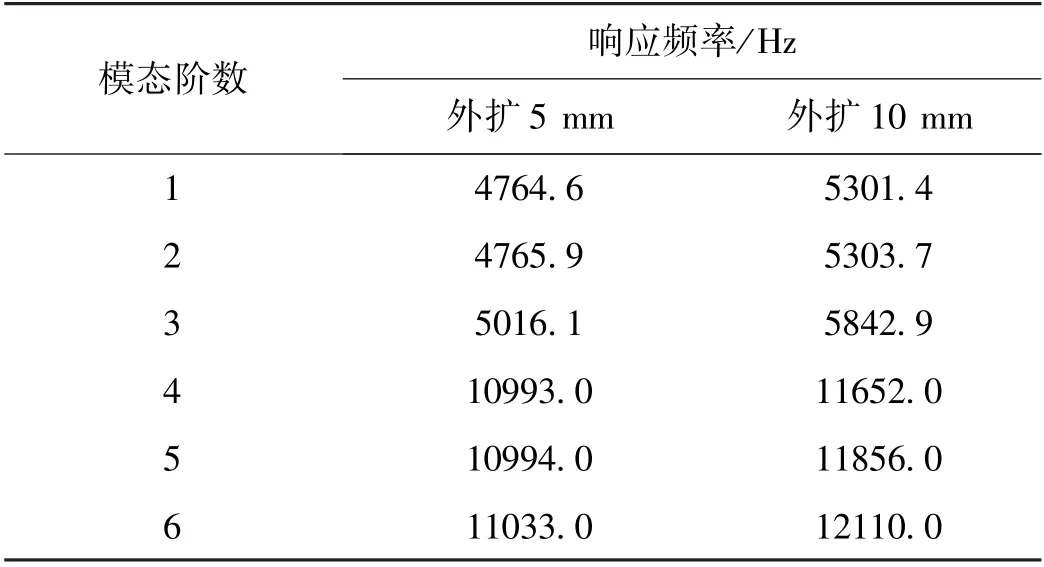
表2 外擴后的各階響應頻率Tab.2 Response frequency of expanded at each order
由仿真結果可知,外擴后的四柱式傳感器與原結構的傳感器相比,固有頻率得到了提高。且外擴10 mm條件下,四柱式傳感器的各階固有頻率提高更多。圖5所示的固有頻率隨外擴參數變化示意圖也顯示,四柱式傳感器的固有頻率隨外擴參數的增加而增加。
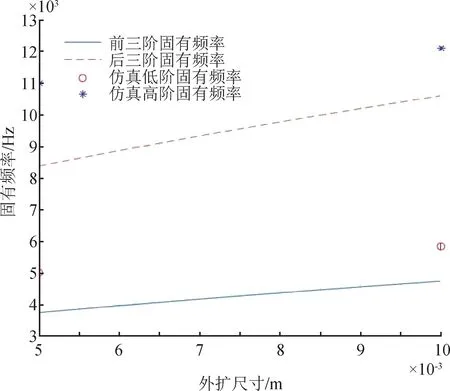
圖5 固有頻率隨外擴參數變化示意圖Fig.5 Schematic diagram of natural frequency variation with external expansion parameters
表3為內擴5,10,15 mm后三款四柱式傳感器的各階固有頻率。
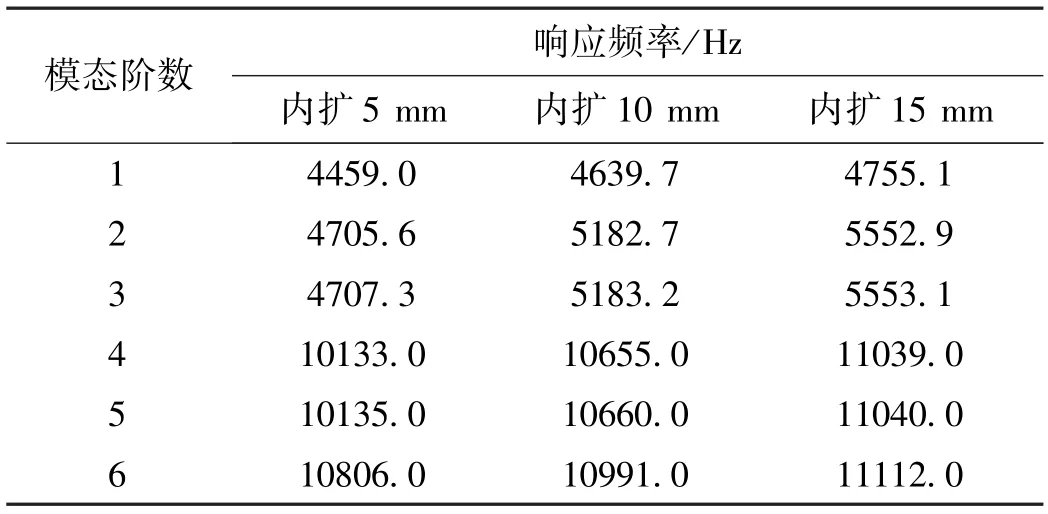
表3 內擴后的各階響應頻率Tab.3 Response frequency of internal at each order
仿真結果表明,分別內擴5,10,15 mm后的四柱式傳感器,與原結構的四柱式傳感器相比,其各階固有頻率均得到了提高,并且,圖6所示的固有頻率隨內擴參數變化示意圖也表明,四柱式傳感器的內擴尺寸越大,其固有頻率越高。
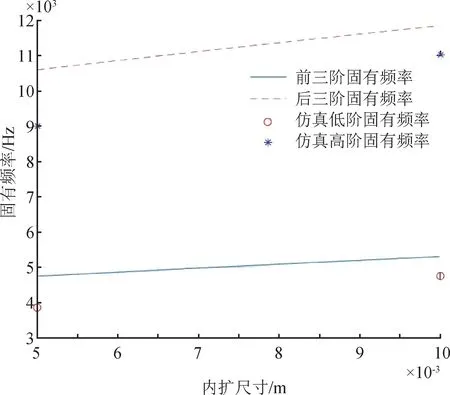
圖6 固有頻率隨內擴參數變化示意圖Fig.6 Schematic diagram of natural frequency variation with internal expansion parameters
綜上所述,無論內擴還是外擴,只要傳感器立柱長度參數l增大,傳感器的固有頻率就會提高,并且傳感器的固有頻率隨立柱長度參數l增大而增加,這與理論研究的結論相同。
2.4 寬度參數變化仿真
對四立柱進行寬度參數w變化的仿真研究,以驗證其對固有頻率的影響。將w分別增大15 mm和25 mm,仿真分析各階固有頻率,結果如表4所示。
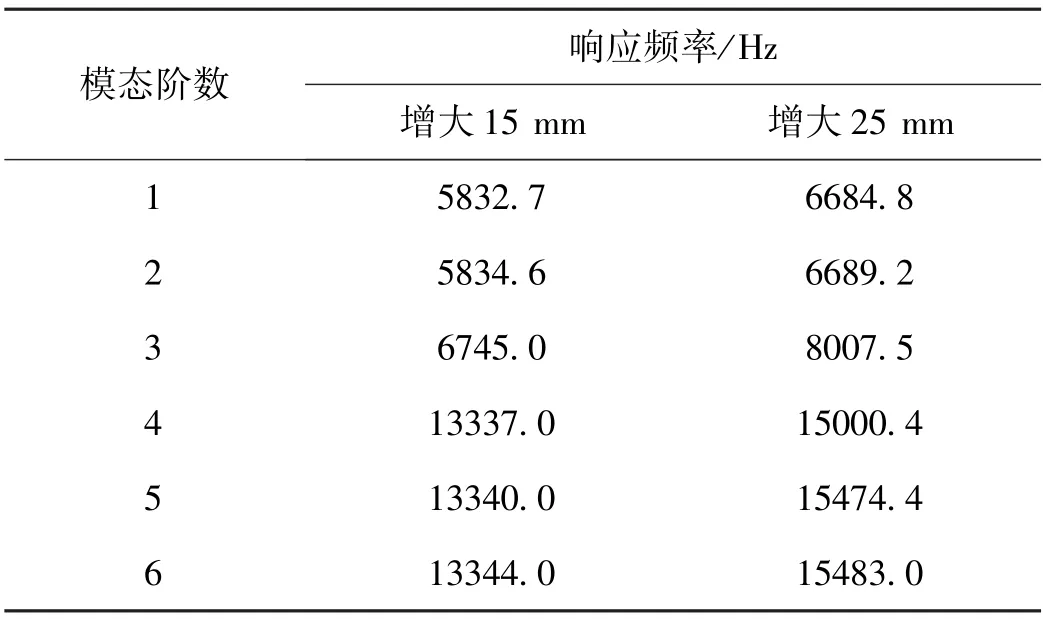
表4 w增大后的各階響應頻率Tab.4 Response frequency of increase w at each order
仿真結果與圖7所示的固有頻率隨寬度參數變化示意圖表明,傳感器固有頻率隨著立柱寬度參數w增大而提高。該仿真研究的結論與理論研究結論一致。
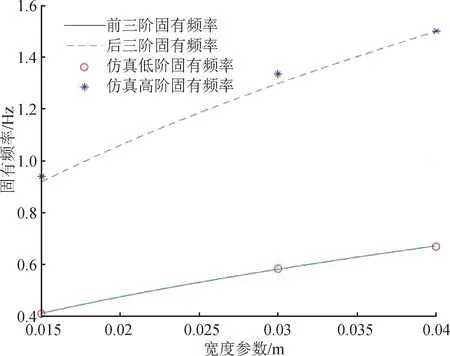
圖7 固有頻率隨寬度參數變化示意圖Fig.7 Schematic diagram of variation of natural frequency with width parameters
2.5 高度參數變化仿真
通過改變四立柱的高度進行相應結構參數下的固有頻率仿真,驗證立柱高度參數變化對各階固有頻率的影響。對立柱高度參數h分別抬高與降低10 mm后的四柱式傳感器進行有限元仿真分析,各階仿真固有頻率結果如表5所示。
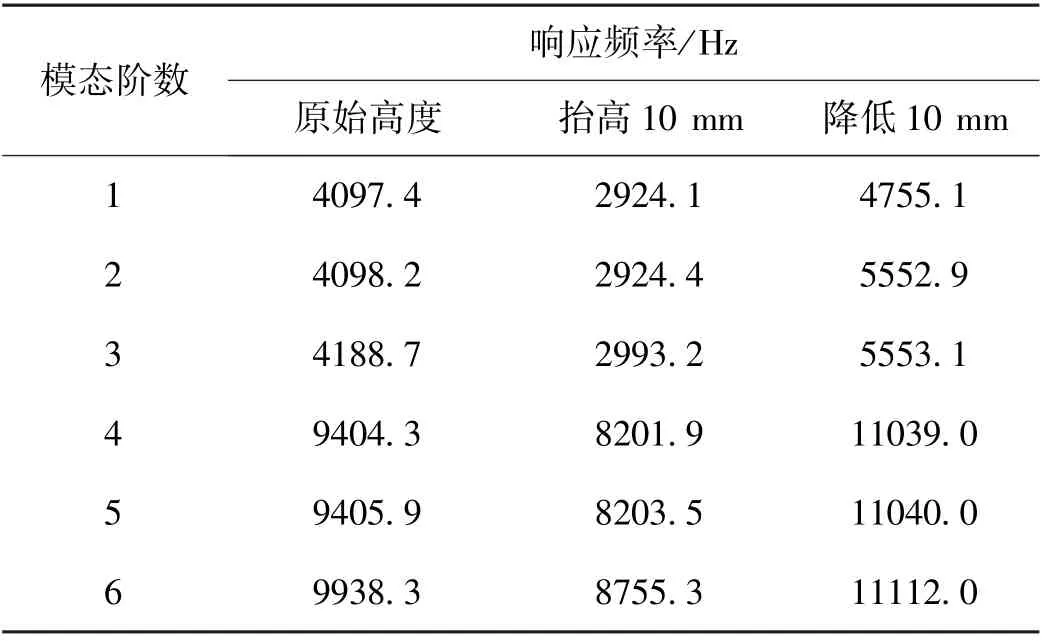
表5 h變化后的各階響應頻率Tab.5 Response frequency of h column at each order
由表5所示的仿真結果與圖8所示的固有頻率隨立柱高度參數變化的示意圖可知,傳感器固有頻率隨著立柱高度參數h減小而提高。該結論與理論研究結論一致。
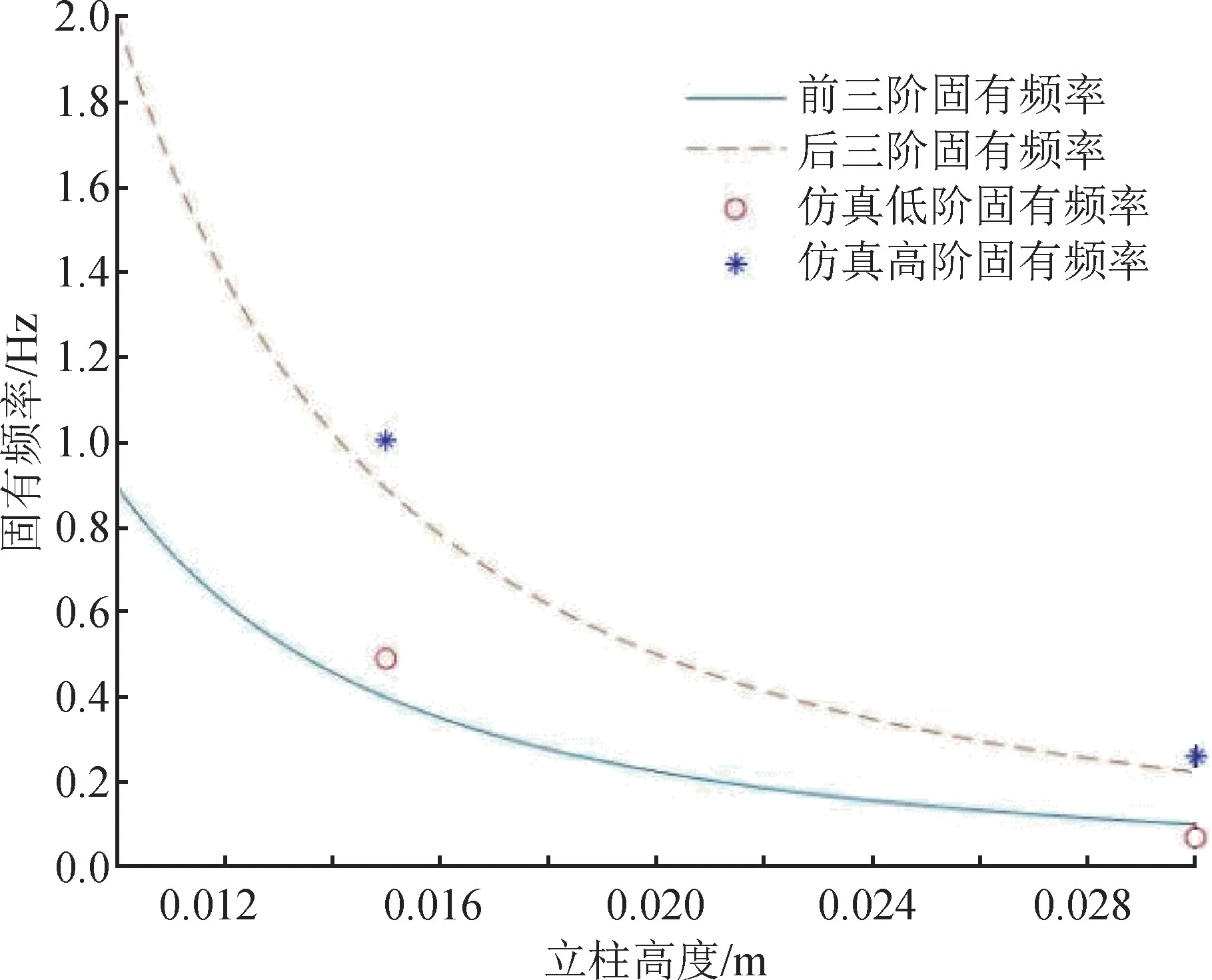
圖8 固有頻率隨高度參數變化示意圖Fig.8 Schematic diagram of variation of natural frequency with height parameters
3 實驗驗證
基于理論與仿真研究結論,對現有四柱式彈性體進行了改進研制,設計上增大了其四立柱橫截面邊長(即長度參數l與寬度參數w),減小了四立柱高度參數h,改進前后各結構參數如表6所示。
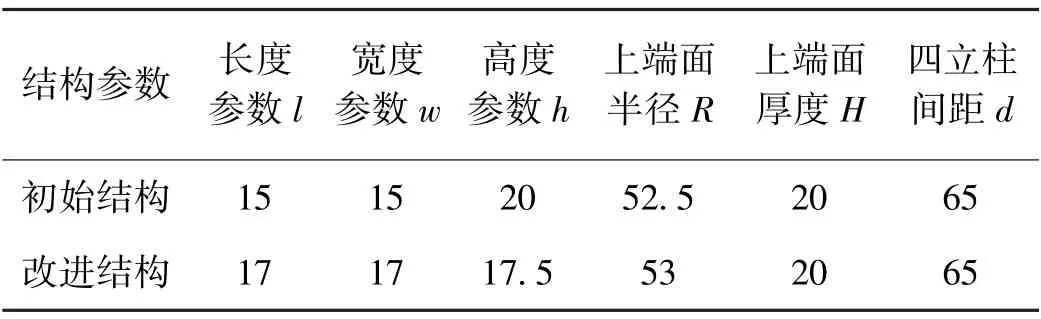
表6 改進前后結構參數對比Tab.6 Comparison of structural parameters before and after improvement
對改進前后的四柱式傳感器進行標準錘擊法實驗,標準錘擊法的原理為通過力錘敲擊獲取脈沖激勵信號,來對傳感器進行激勵與測量。實驗測試了對傳感器動態性能影響最大的Z軸振蕩固有頻率(第六階固有頻率),改進后的四柱式傳感器實驗響應波形曲線如圖9所示。測試得到的四柱式傳感器改進前后的固有頻率與理論固有頻率的相對誤差分析如表7所示。
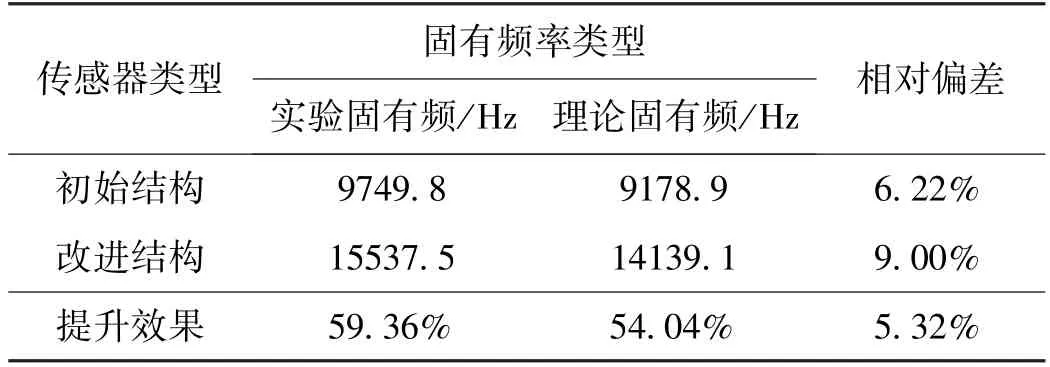
表7 初始結構與改進結構固有頻率對比與分析Tab.7 Comparison and analysis of natural frequencies between initial structure and improved structure
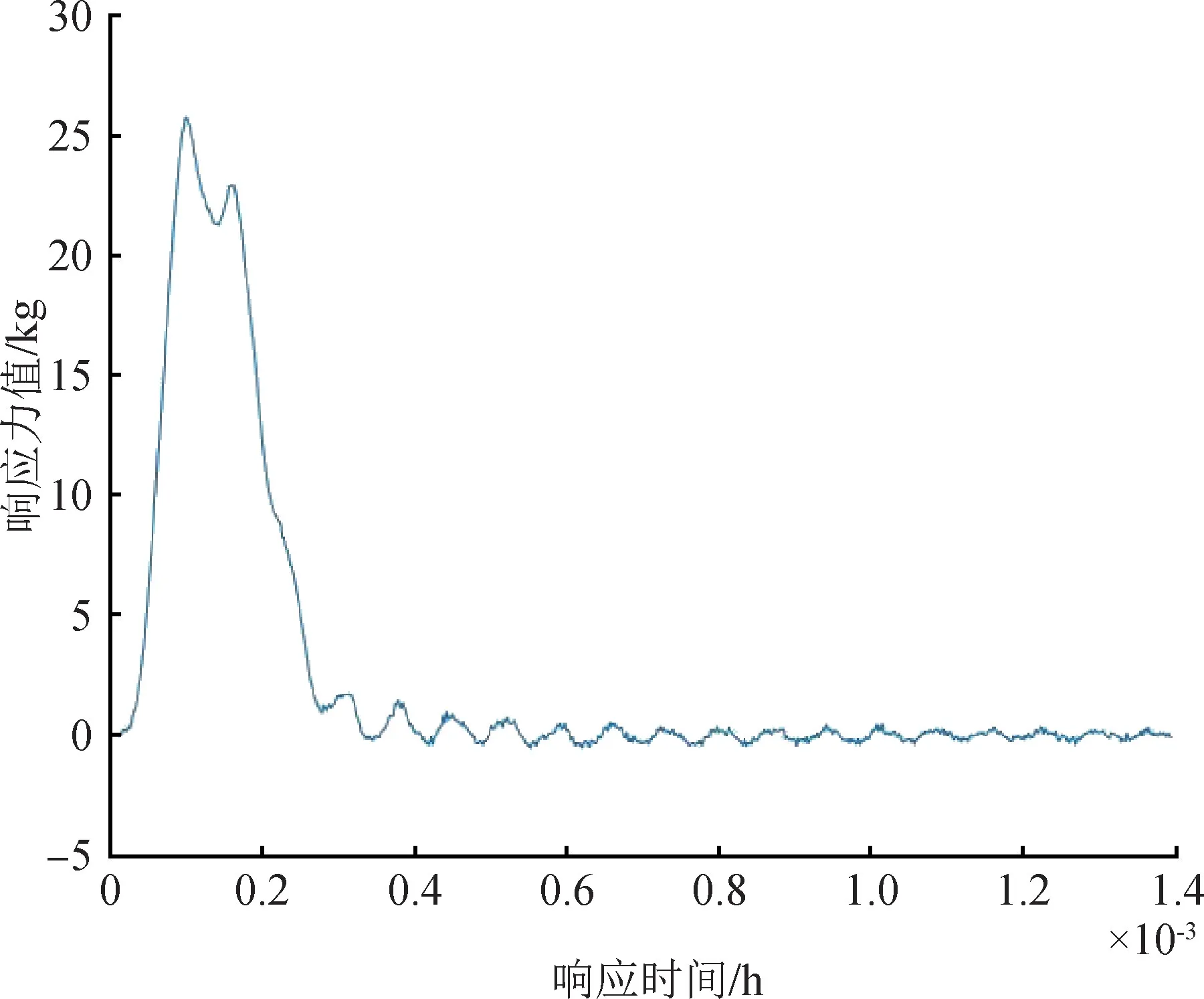
圖9 實驗響應波形圖Fig.9 Experimental response waveform
該實驗結果驗證了理論與仿真研究結論的正確性,在保證不犧牲傳感器大量靜態性能的前提下,將四柱式傳感器的固有頻率由9749.8 Hz提升至15537.5 Hz,即提升了近50%的固有頻率,進而使動態測試的工作頻率范圍與動態力值變化的跟隨性能得到了提升。
4 結論
本文通過改進四柱式力傳感器的結構參數來提升傳感器固有頻率,結合理論分析、仿真研究與實驗研究,提出了通過改變四柱式力傳感器結構參數和材料參數的方法來提升固有頻率,為今后改進、設計高動態性能四柱式傳感器奠定了基礎。由于目前應用的四柱式力傳感器材料的性能符合靜態力學指標,故不能通過更換材料的方法來提升傳感器動態性能,且材料改進研究也不屬于本學科研究內容,故改進材料參數的研究結論可作為輔助手段與進一步優化應用的方向。
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
哲學評論(2021年2期)2021-08-22 01:53:34
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
數學小靈通(1-2年級)(2020年9期)2020-10-27 03:24:18
科技傳播(2019年22期)2020-01-14 03:06:54
當代貴州(2019年41期)2019-12-13 09:28:56
中華詩詞(2019年7期)2019-11-25 01:43:04
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
中國共青團(2015年7期)2015-12-17 01:24:38