智能交通發展的現狀、挑戰與展望
2021-02-11 15:00:10嚴新平褚端峰劉佳侖蔣仲廉
交通運輸研究 2021年6期
嚴新平,褚端峰,劉佳侖,蔣仲廉,賀 宜
(1.武漢理工大學 智能交通系統研究中心,湖北 武漢 430063;2.武漢理工大學 交通與物流工程學院,湖北 武漢 430063)
0 引言
當今世界正經歷百年未有之大變局,交通系統正在新一輪科技革命推動下發生深刻變革。交通系統由駕駛人、運載工具、基礎設施及交通環境等組成,是一個復雜的、有人參與的“信息-物理-社會”系統(Cyber-Physical-Social System,CPSS),其最終目標是實現安全、便捷、高效、綠色、經濟的現代化交通體系,為人們出行、社會經濟活動、國防建設等提供有力支撐。但是,當前我國的交通系統仍然存在三大難題:交通安全、交通效率和節能減排。
一是交通安全水平仍需提升。公安部交通管理局發布的《道路交通事故統計年報》顯示:2019 年,我國道路交通事故1 247.3 萬起,死亡62 763人,受傷256 101人,直接財產損失13.5億元。從世界范圍內對比來看,在道路交通事故死亡人數、萬車死亡率方面,我國與發達國家仍有較大差距(如圖1所示)。
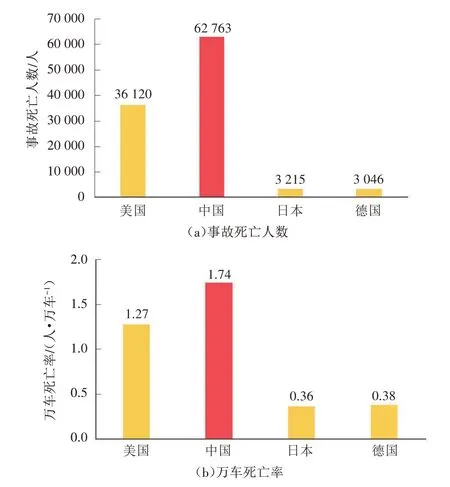
圖1 我國與發達國家的道路交通事故數據對比圖(2019年)
二是交通系統運行效率尚待提高。在道路與水路交通運輸方面,我國存在城市道路交通擁堵常態化、高速公路節假日擁堵加劇、內河航道利用率有待提高等諸多問題。滴滴出行發布的《城市交通出行報告》顯示:2021 年第一季度,我國主要城市的道路交通擁堵時長在1 小時以上,道路交通峰時平均速度低于40千米/小時(見圖2)。

圖2 我國主要城市的道路交通運行狀態統計數據(2021年第一季度)
三是交通系統節能減排任重道遠。根據國家統計局發布的《中國能源統計年鑒2020》測算,2019 年我國交通運輸行業碳排放量約為11.4 億噸,占全國碳排放總量的11%。公路、水運、鐵路、航空是交通領域碳排放主要來源,其中,公路運輸碳排放占比86.76%,是碳排放量最高的運輸方式(如圖3所示)[1]。

圖3 2019年我國不同交通運輸方式二氧化碳排放量
智能交通為上述三大問題的解決帶來了契機。過去,傳統交通系統通過信息采集、處理、發布來提高信息服務水平,完成交通信息化的初級階段。當前,智能交通采用“智聯網聯、協同優化”方式來大幅提升交通安全和效率[2]。未來,通過“智慧綠色、安全高效、融合一體、自主無人”的未來交通系統的實現,達到“零死亡、零排放、碳中和”的交通愿景[3]。下面,本文對智能交通的發展現狀、存在的挑戰和未來的發展方向進行討論。
1 發展現狀
智能交通系統的核心是利用現代信息技術對傳統的運載工具與交通系統進行升級與改造,從而形成智能化、網聯化的新一代交通運輸體系。近年來,在物聯網、大數據、人工智能等新興技術的大力推動下,智能交通系統也有了長足發展。一方面,智能感知、路徑規劃、決策控制等人工智能領域的最新技術正廣泛應用于運載工具之中,促使其朝著協同化、無人化的方向演進[4];另一方面,模式識別、無線通信、信息融合等新興技術極大地促進了交通系統在信息采集、處理和傳輸等方面的便捷性和有效性。
1.1 智能汽車發展現狀
汽車智能駕駛是智能交通非常活躍的一個發展方向。目前,汽車正處在由“功能汽車”到“智能網聯汽車”“自動駕駛汽車”的進程中[5]。國外,特斯拉作為汽車空中下載(Over The Air,OTA)技術的先驅,率先讓汽車可以像智能手機一樣在云端進行系統升級。國內,百度“Apollo平臺”通過向汽車行業及自動駕駛領域的合作伙伴提供一個開源、開放、完整的軟件平臺,打造類似于智能手機Android 平臺的智能汽車生態[6]。同時,國內外幾乎所有的汽車廠商、“造車新勢力”與汽車零部件供應商都在努力研發智能汽車及其零部件,致力于自動駕駛系統的早日大規模商用。
自動駕駛是智能汽車發展的高級階段,它涵蓋了電子信息、自動控制、計算機、地理信息、人工智能、車輛工程等多個技術領域,是當今智能交通領域最前沿的研究方向。自動駕駛系統賦予汽車以感知、決策和控制等綜合能力,獨立、自主地完成駕駛任務,而不需要人類幫助。自動駕駛系統主要利用各種車載傳感器,如計算機視覺、激光雷達、毫米波雷達、全球衛星導航系統(Global Navigation Satellite System,GNSS)、慣性測量單元(Inertial Measurement Unit,IMU)等,獲取車輛周邊的環境信息,基于信息融合方法,對采集到的交通環境與行車狀態等原始信息進行精確認知[7],再通過智能決策規劃方法,為自動駕駛汽車規劃出安全、高效的預期軌跡與速度,最后通過對自動駕駛汽車進行縱橫向運動控制,自動調節油門、剎車、檔位和轉向等[8],實現對預期軌跡與速度的實時跟蹤[9],從而使得汽車能夠安全、高效地行駛。
一個理想的自動駕駛系統應該像熟練的人類駕駛員一樣,能對車輛運動及環境變化作出準確的判斷,實時地改變車輛運動,完成駕駛任務[10]。然而,限于自動駕駛在感知、融合、決策、規劃、控制等多方面的技術難題,以及成本、可靠性等方面的束縛,當前,大規模量產的智能汽車仍處于L2 級及以下的駕駛輔助階段,L3 級及以上的自動駕駛仍未跨越。圖4 所示為工業和信息化部發布的《汽車駕駛自動化分級》(GB/T 40429—2021)作出的描述。
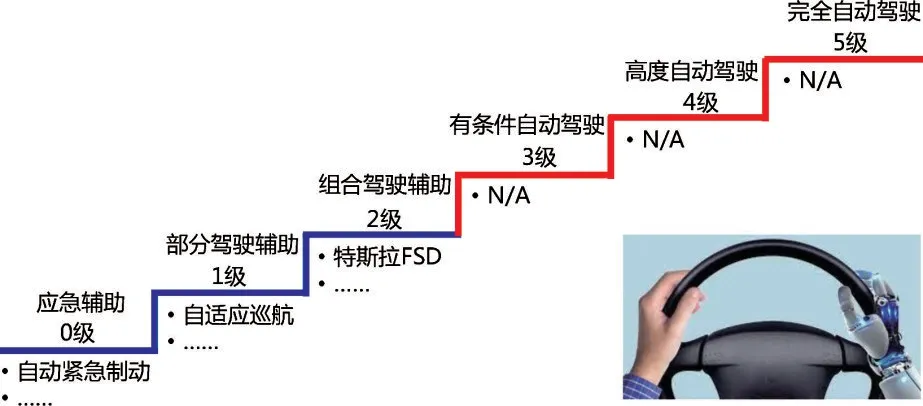
圖4 汽車駕駛自動化分級
當前,甚至未來較長一段時間內,普通開放道路中的自動駕駛技術可能仍難以大規模商用。但是,在一些特定場景中的自動駕駛正在逐步規模化應用,例如,港區集裝箱運輸、礦區貨物運輸和農業機械等,無人化的自動駕駛技術,變革了它們原有的低效、繁重、高成本的工作模式,顯著提升了運營效率和經濟性。
港區集裝箱運輸為半封閉式的低速運營模式,是自動駕駛率先商用的典型場景之一,國家也出臺了相關政策來指導這一應用。交通運輸部等九部門聯合印發的《關于建設世界一流港口的指導意見》提出:到2025年,部分沿海集裝箱樞紐港初步形成全面感知、泛在互聯、港車協同的智能化系統。目前,國內應用自動駕駛進行集裝箱運輸的港口主要包括上海港、青島港、天津港、寧波舟山港等。
采礦業是我國國民經濟的基礎和支柱產業,用工難、運輸成本上升是推動礦山智慧化的主要因素,因而礦區自動駕駛具有典型的代表意義[11]。海外礦區自動駕駛的主要代表是大型工程機械公司,如卡特彼勒、小松、日立等。其中,卡特彼勒和小松已進入商用階段。國內礦山自動駕駛發展相對較晚,但技術更新和應用較快,三一重工、徐工、航天重工等在白云鄂博礦、哈爾烏素煤礦、城門山銅礦等開展了規模應用,取得了良好效果。
1.2 智能船舶發展現狀
智能船舶作為未來航運的載體,其自身發展需突破船舶感知、認知、決策、執行、測試等多個維度的關鍵技術,實現船舶由小到大、由內河到外海、由近海到遠海逐步智能化、自主化的發展[12]。“航行腦”系統技術體系與理論架構(如圖5所示),即利用一套由人工智能系統構建的“機器腦”替代傳統駕控人員的“大腦”,實現對船舶的自主駕控[13]。目前,智能船舶仍然處在研發過程中,“航行腦”系統是面向智能船舶的人工智能系統,由感知、認知、決策和執行等功能空間組成,促進傳統船舶駕駛逐步向增強駕駛、輔助駕駛、遠程駕駛、自主駕駛等不同功能階段演進。

圖5 “航行腦”理論架構與技術體系
船舶的智能化可分為L0 級到L5 級的6 個等級(如圖6所示)。目前,智能船舶應用還處于輔助駕駛階段,要完全實現自主航行,還有很長的路要走。隨著人工智能和大數據等高新技術的進步,通過與新基建建設同步、與水路運輸模式和航運轉型發展結合,未來智能船舶的遠程遙控、人機共駕、網聯協同和自主航行等功能會日臻完善[14]。

圖6 智能船舶的智能化等級
船岸協同是智能船舶發展中一個非常重要的理念[15]。船岸協同由岸端與船端系統構成,是實現智能船舶實際運營的應用基礎。日本、歐盟等國家和地區都開展了這方面的探索和實驗。日本國土交通省拖輪遠程駕駛項目通過拖輪配備傳感器和攝像設備,實時監測航行態勢,通過船岸協同與試驗船舶建立信息共享,實現協同控制。比利時SEAFAR 駁船遠程駕駛項目融合船側/基礎設施側多源信息,實現協同感知,并遠程實時分析船舶動態,進行多船舶集中管理和操作。我國在這方面也開展了積極探索:“筋斗云0號”小型無人貨船項目于2019 年12 月在珠海順利完成遠程遙控和自主航行試驗;“智飛號”智能航行集裝箱運輸商船于2021 年10 月安裝我國自主研發的智能航行系統,具有人工駕駛、遠程遙控駕駛和無人自主航行等三種駕駛模式。
在船舶輔助駕駛方面,國內首艘應用人工智能并投入實際營運的汽渡船舶[16],搭載了基于“航行腦”架構開發的“汽渡智能輔助駕駛系統”,可實現兩大功能:①船端智能感知,通過融合雷達和AIS 數據實現對水中動靜態障礙物的識別,增強了夜航、霧航、雨天等不良自然條件下的感知能力;②岸基智能監管,可對航行船只和監管水域實現全程監控、遠程監控,提供分米級精度的船間距離監測,為駕駛員提供精確預警并推薦優化航線。這一系統目前在南京板橋汽渡、舟山普陀山汽渡得到應用。
1.3 道路智能交通系統發展現狀
道路交通系統是由汽車、道路基礎設施、運輸基礎設施、信息和人組成的一個共同完成汽車客貨運輸的系統[17]。該系統包括自然與人造、實體與概念、靜態與動態、控制與行為等系統,衍生到城市大腦、智慧城市、全息交通感知等應用場景。
(1)阿里云城市大腦系統
目前,國內外都在積極探索道路交通系統的智能化。國內比較典型的是“阿里云城市大腦系統”。該系統包括城市交通治理解決方案、智慧交通運輸綜合解決方案、智慧停車綜合解決方案、智慧城管解決方案、智慧應急綜合解決方案、政務數據中臺等多個解決方案。城市大腦系統是整個城市的智能中樞,可對城市進行全局實時分析,利用城市的數據資源優化調配公共資源,最終將進化成能夠治理城市的超級智能。
(2)華為智慧城市系統
華為智慧城市平臺是結合了人工智能、物聯網、大數據、地理信息系統、視頻、云、融合通信和安全的一個綜合性應用系統。它的兩大關鍵能力是:面向城市交通的關鍵業務場景、為生態伙伴提供差異化價值。智慧城市將New ICT 技術深度融入政府業務服務和城市應用服務中,推動數字經濟的發展,改善人民的生活水平,實現興業、善政、利民的目標。
(3)全息交通感知系統
武漢理工大學自主研發了全息交通感知系統,包括利用仿真系統對交通基礎設施的安全性進行評價,在道路交通基礎設施建設過程中預設光纖傳感器,利用光纖傳感器實時獲取道路交通流狀況信息及路面變化信息。同時,利用路側和路面的交通基礎設施提供有關信息,為行車安全提供更好的支持和服務。如圖7 所示,該系統包括道路系統運行仿真系統、智慧公路模擬系統和智慧公路全息感知決策控制平臺等。

圖7 全息交通感知系統
1.4 智慧海事監管系統發展現狀
由國際運輸工人聯合會和世界海事大學共同制作發布的題為《交通運輸2040:自動化、技術與就業》的報告預測,到2040年左右,有人監控下的自主船舶將達到15%左右,包括未來搭載了不同智能功能的船舶,比如智能貨物管理、智能船體、智能集成信息平臺等,也包括安全輔助駕駛和在開闊水域控制等高級自主功能[18]。因此,智能船舶對智慧海事監管系統的發展提出了迫切的需求。
(1)瑞士海區整體監管系統
瑞士的海區整體監管系統(Maritime Area Integral Supervision,MAIS)建立了一系列集成各種技術的信息層,以監控海區中船舶作業的授權情況,以更好地對轄區內船舶進行管理和控制。MAIS 可以幫助港口禁區、生物保護區和漁場防止入侵者和非法捕魚。
(2)江蘇段航運系統智能管控平臺
我國也在積極開發航運系統的智能管控平臺。江蘇段航運系統智能管控平臺基于江蘇海事全要素感知云服務數據中心,構建了水路交通場景數字化平行仿真模型,可推演預測多尺度條件下的交通流態勢,可及時動態調整資源分配實現對通航要素的干預,致力于由“人盯死守”的傳統海事監管方式向以智慧管理為核心的現代方式轉變(如圖8所示)。

圖8 江蘇段航運系統智能管控平臺邏輯架構
(3)長江水上應急指揮平臺
長江水上應急指揮平臺基于數字孿生技術,可展示事故現場處置情景,智能化記錄搜救過程,提供智能指揮搜救、分析研判和決策功能,打造科學高效和快速反應的“指揮-現場”聯動體系,實現由被動響應向主動預見的轉變。
智能交通的發展涉及運載工具、交通基礎設施、光電子信息、互聯網等多個行業與技術領域的交叉、融合,其大規模應用需要多個行業和部門聯動推進和協同發展。
2 技術挑戰
盡管智能交通在交通運輸工程領域的一些典型場景中得到了應用,但目前仍然面臨巨大的技術挑戰,主要體現在三方面:一是人工智能技術水平很難滿足智能交通發展的需求;二是智能交通系統可靠性的驗證;三是智能交通系統法規標準體系的建立和完善。
2.1 人工智能技術發展水平
人工智能(Artificial Intelligence,AI)的概念最早源于1956年在美國達特茅斯學院舉辦的夏季研討會。近年來,得益于大數據和深度學習的發展,人工智能在單一的抽象博弈智能層面克服了人類社會的“知識積累性壁壘”局限[19],通過在規則活動中構建系統、嚴謹的認知模式,在交通、機械等領域實現了大規模應用,深刻影響了人們的工作和生活模式。
從功能水平來說,人工智能可分為弱人工智能、強人工智能和超級人工智能[20]。弱人工智能:執行基礎的、特定場景下的角色型任務,例如,Siri 聊天機器人、AlphaGo 下棋機器人。強人工智能:執行人類水平的復雜任務,涉及機器的持續進化與學習。超級人工智能:比人類更聰明的機器智能。盡管人工智能技術已經在天氣預報、自然語言處理、生物特性識別、醫學檢測分析等方面取得很好的應用效果,但仍然屬于弱人工智能,其推理能力有限。2016年,特斯拉CEO 馬斯克表示,汽車在任何路況下進行自動駕駛的能力在兩年內就可以實現。直到2021年,馬斯克又表示,通用自動駕駛是一個如此艱難的任務,需要解決很大一部分現實世界的AI問題。事實上,當前的智能決策技術在面對復雜的駕駛任務時,與人類駕駛水平相比還有很大差距。
2.2 智能系統的可靠性驗證
智能系統進入快速發展階段依舊存在可靠性問題。系統可靠性一般是指規定時間和工況下,完成規定功能的能力/概率。統計數據顯示:自2013 年起至筆者撰稿時,特斯拉汽車共發生交通事故218 起,造成14 人死亡,82 人受傷;谷歌報告顯示在14個月的測試中,智能汽車共“主動脫離自動駕駛狀態”272 次,69 次選擇取消自動駕駛狀態。快速、有效、準確的系統可靠性測試和評估技術,是保證智能系統發揮核心功能、降低系統不可預知風險的重要前提[21]。系統可靠性研究已得到智能系統領域學者的廣泛關注。
首批試駕谷歌智能汽車的美國Medium 科技總編Steven Levy 表示:“無人駕駛汽車的大規模應用,我們現在也許到了95%,但最后的5%將會是漫長的路途”。這最后的5%,正是人工智能的“長尾問題”(Long-tail Problem)導致的。在自動駕駛領域,特殊天氣條件下的部分感知信息缺失、特殊路段的部分傳感器不穩定等不常見駕駛場景導致的“長尾問題”,限制了自動駕駛的可靠性及其量產應用,亟待提出完善的可靠性驗證手段予以解決。
任何智能系統都面臨不斷更新和迭代的問題,既要通過實際應用發現問題所在,也需要結合可靠性驗證手段來完善其性能。以船舶的可靠性驗證為例,傳統船舶性能測試方法主要包括虛擬仿真、模型試驗、實船實驗等三種,但智能船舶的測試驗證方法體系尚處于構建階段[22]。考慮到船舶自身的高價值屬性、實船測試的風險性、模型試驗的尺度效應等因素,智能船舶測試驗證以虛擬測試為主、模型測試為輔;構建“人-船-環境”精細化模型,是提升虛擬測試精度的重要途徑。因此,如何兼顧智能系統測試的可靠性和高效性、典型測試工況和極端事件場景,是智能船舶測試驗證方法體系發展中需要重點思考的問題[23]。
2.3 智能車、船系統法規標準體系
近年來,智能車、船系統的關鍵技術取得了長足進步,但配套的法規標準體系研究仍然面臨巨大挑戰[24]。智能車、船系統在運行中形成了“現實層-數據層-知識層-現實層”的閉環,由于智能車、船系統的不確定性可能導致安全問題,智能車、船系統對傳統責任體系產生重大沖擊,面臨人工智能倫理規范挑戰。人工智能是否具有法律主體地位,是學術界爭論的重要話題[25]。目前,人工智能研究領域兩大基本范式(功能主義的問題求解范式、聯結主義的機器智能學習范式)均否認了其主體地位。因此,亟需堅守人的價值主體地位,構建面向智能車、船系統的完善的法規標準體系,促進智能車、船系統穩定有序地發展,造福人類生產和生活。
3 未來展望
交通系統正朝著綠色化、高效化、智能化和人性化的方向發展。綠色化,是指實現高能效、低排放的新一代交通系統;高效化,是指實現更便捷的融合交通系統,提高交通效率;智能化,是指突破載運工具、基礎設施智能化關鍵技術,實現自主式交通系統;人性化,是指實現交通出行的定制化、一鍵化,提升交通出行的舒適性。
智能交通系統的未來發展趨勢是自主式交通系統,即在沒有足夠的人類監督的情況下,可在變化的、不可預測的交通環境中“理性地行動”,或能在經驗中學習,利用數據提升系統性能。自主式交通系統是由智能運載工具、智慧基礎設施和云端智能交通組成,具有感知、交互、學習和執行能力,是一種協調完成單體智能、群體協同和整體優化的交通系統。
未來,須在《交通強國建設綱要》和《國家綜合立體交通網規劃綱要》的政策指引下,統籌各方力量,推動我國自主式交通系統發展,實現安全、便捷、高效、綠色、經濟的綜合交通運輸體系。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
商界(2019年12期)2019-01-03 06:59:05
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
IT經理世界(2018年20期)2018-10-24 02:38:24
小康(2017年16期)2017-06-07 09:00:59
