INS/CNS/GNSS機載高性能空中對準技術研究
2021-02-18 07:43:40陳善秋武慶雅吳禹彤張麗玲夏宇強龍騰宇
導航與控制 2021年6期
關鍵詞:信息
陳善秋,武慶雅,吳禹彤,張麗玲,夏宇強,龍騰宇
(1.國防科技大學空天科學學院,長沙 410073;2.北京航天時代激光導航技術有限責任公司,北京 100094)
0 引言
捷聯慣導系統(Strapdown Inertial Navigation Sys?tem,SINS)在進入正常導航工作狀態之前必須進行初始對準。初始對準為SINS工作提供初始姿態航向信息,是影響導航系統性能的關鍵技術之一,在很大程度上決定了慣導系統的工作精度和快速反應能力[1]。一般情況下,載機可以在地面完成靜基座初始對準,但緊急情況下載機可能要隨時起飛,需要在空中通過動基座對準方式完成初始對準。
載機在空中一般通過衛星導航系統(Global Navigation Satellite System,GNSS)提供的速度和位置信息進行對準[2],但實際應用中該方法對準時間長,精度也無法得到保證。近年來,學者們提出了一些新的機載動基座初始對準方法,如利用視覺、 Doppler測速、 雷達等輔助的方法[3?6]。 隨著星敏感器探測能力的提升,大氣層內全天時小視場星敏感器日益成熟,長航時遠程飛機開始配備天文導航設備[7]。 天文導航系統(Celestial Navigation System,CNS)定向精度是目前所有導航系統中最高的,且定位精度次于GNSS。為充分發揮GNSS與CNS各自的優勢,本文提出了一種基于衛星天文輔助的機載慣導空中對準方法。由于GNSS與CNS的輸出頻率不同,且不一定具有整數倍數關系,若使用集中濾波、聯邦濾波或傳統意義上的序貫濾波,則需要對量測信息進行內插外推,不僅計算量大,還會造成一定程度的精度損失。針對此問題,本文采用廣義序貫濾波方法來實現多傳感器的異步信息融合。仿真結果表明,該方法能夠提升機載慣導空中對準精度,同時縮短對準時間,在很大程度上提升了武器裝備的精確打擊能力和快速反應能力,可支持飛機應急起飛等突發性作戰要求,使其在作戰中處于主動地位,具有一定的工程應用價值。
1 衛星天文輔助空中對準模型建立
1.1 坐標系定義
地心慣性坐標系(i系):地心慣性坐標系不隨地球自轉,其坐標原點為地心,OXi軸、OYi軸在地球赤道平面內,OXi軸指向春分點,OZi軸指向地球極軸,由右手定則決定OYi軸方向。
地球坐標系(e系):地球坐標系是固連在地球上的坐標系,隨地球旋轉,其原點為地球中心,OZe軸指向地球極軸,OXe軸通過零子午線,OYe軸指向東經90°方向。
導航坐標系(n系):根據導航系統工作需要選取的導航基準坐標系,本文中選取東北天坐標系,即OXn軸指向東,OYn軸指向北,OZn軸指向天頂。
計算坐標系(n′系):由慣導計算得到的數學平臺,與n系之間有三個平臺誤差角φe、φn、φu。
慣導坐標系(b系):原點在慣導重心,OXb軸、OYb軸、OZb軸分別沿慣導橫軸向右、縱軸向前、立軸向上。
星敏坐標系(s系):原點在星敏感器重心,OXs軸、OYs軸、OZs軸分別沿星敏感器橫軸向右、縱軸向前、立軸向上。
幾個坐標系的位置關系如圖1所示。
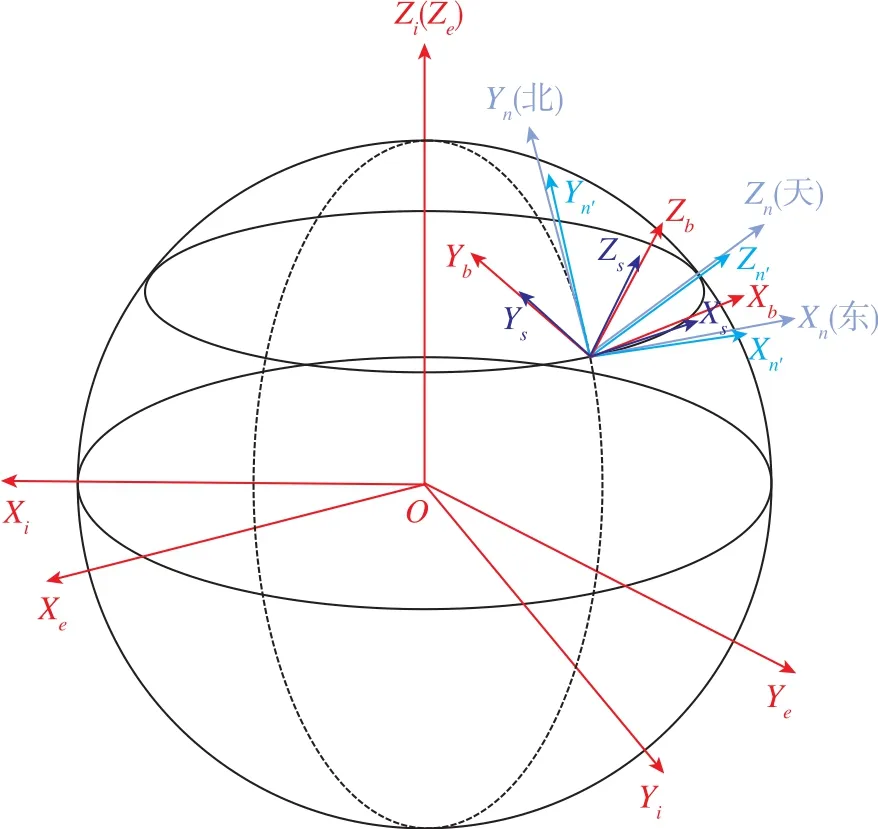
圖1 坐標系間的位置關系Fig.1 Positional relationship between coordinate systems
1.2 慣性導航系統模型
將慣導的誤差量及慣性儀表的常值項誤差作為狀態量,由于慣導高度通道不穩定,需要外部阻尼,在建模時不考慮高度和天向速度,則有

式(1)中,φe、φn、φu為姿態誤差角,δve、δvn為速度誤差,δλ、δL為經度誤差、 緯度誤差,εx、εy、εz為陀螺儀隨機常值漂移,為加速度計隨機常值偏置,下標e、n、u表示變量在n系三軸的分量,下標x、y、z表示變量在b系三軸的分量。
基于慣導誤差方程,慣導系統的狀態方程可表示為


式(3)中,ωie為地球自轉角速度,vE、vN、vU為東向速度、北向速度、天向速度,L為緯度,h為高度,fE、fN、fU為東向比力、北向比力、天向比力,RM、RN為子午圈半徑和卯酉圈半徑。
1.3 衛星導航系統觀測模型
衛星導航系統能夠提供速度、位置信息,其觀測量為

量測方程如下

式(5)中,Xk即為式(1)所示狀態向量,為衛星量測噪聲。
1.4 天文導航系統量測模型
機載天文導航系統一般采用小視場星敏感器,其輸出為恒星在星敏系和地球系的矢量坐標。選取恒星在慣導系的矢量坐標為濾波觀測量,則有

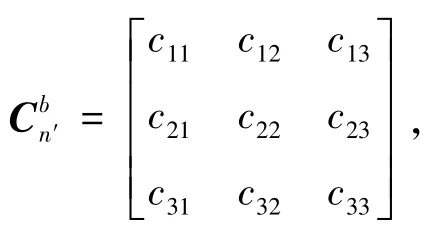
式(6)中,Sb=[SbxSbySbz]T為慣導系矢量,可由星敏感器輸出的星敏系矢量通過安裝誤差矩陣轉換得到;為慣導系矢量真值;VCNS為測量噪聲。 其中,Se=[SexSeySez]T為地球系矢量真值,可通過慣性系矢量和絕對時間計算得到。為慣導姿態矩陣(可由慣導實時解算得到),為導航系到計算系的轉換矩陣,為地球系到導航系的轉換矩陣真值。
可用慣導解算的經緯度λI、LI和經緯度誤差δλ、δL表示,有


一般情況下,衛星導航系統輸出頻率為1Hz,天文導航系統輸出頻率更低,兩者均低于慣導更新頻率。因此,衛星天文輔助慣導空中對準是一種異步多源信息融合問題。對多源信息融合,一般采用集中濾波、聯邦濾波或者傳統意義上的序貫濾波進行處理。這些濾波方法均要求各信息源統一到同一時刻,需要進行內插外推,這不僅會造成精度損失,還會增加算法復雜度和計算量。為此,本文將序貫濾波算法進行推廣,使其在無需對觀測信息進行處理的前提下適用于異步多源信息融合系統。
2 廣義序貫濾波算法
傳統意義上的序貫濾波算法是為降低高維數觀測向量情況下濾波算法的計算量而使用的處理方法。通過將觀測更新中對Zk的集中處理分散為對Zk的各分量組的順序處理,有效地降低了計算量,同時增強了算法可重構性,即當測量裝置中某個或某幾個傳感器突然中斷時,濾波器還可以利用測得的信息繼續工作,實現了量測信息的即插即用。觀測向量的序貫處理只在量測更新中進行,因此要求所有觀測信息在同一時刻[8]。
傳統序貫濾波算法的局限性在于:在濾波時刻僅進行一次狀態更新,然后對多組量測信息進行序貫處理。若可以在任意一組觀測信息到來的時刻均進行一次狀態更新和量測更新,則可避免將所有傳感器信息統一到同一時刻。由于不同量測信息均是針對同一組狀態變量進行估計,該濾波算法本質上依然是對不同時刻的量測信息進行了序貫處理,故在此稱之為廣義序貫濾波算法。
設某個異步信息融合系統有l個量測系統,第i(i=1或2或…或l)個、 第j(j=1或2或…或l)個量測系統分別在k-1時刻、k時刻產生量測信息,將其觀測向量表示為設基于k-2次觀測向量集合可為任意量測系統輸出,在此缺省上標)得到的線性最小方差估計為那么基于估計Xk-1而得到的一步最優線性預報為
其中,符號表示正交投影[8]。 在 獲 得后, 濾波估計為然后到k時刻, 在獲得后,要重新計算狀態更新一步預測值進而從Xk,k-1和計算得到
可見,廣義序貫濾波算法可以通過在量測信息到來時刻順序進行狀態更新和量測更新來實現異步多源信息融合,既解決了時刻統一帶來的精度損失問題,又保留了傳統序貫濾波算法即插即用的優點。在第j個量測系統產生量測信息的k時刻,廣義序貫濾波過程如下
(1)狀態一步預測

(2)狀態一步預測均方誤差

(3)進行量測更新
將廣義序貫濾波應用于衛星天文輔助空中對準,當衛星或天文導航系統在不同時刻獲得量測信息后,系統都會在上一次更新的基礎上進行更新,從而使得每個輔助系統的量測信息都在狀態估計中發揮作用。廣義序貫濾波可實現衛星、天文導航系統的優勢互補,使狀態量在較短時間內達到最小方差估計。本文所提出的衛星天文輔助空中對準算法,其廣義序貫濾波過程如圖2所示。
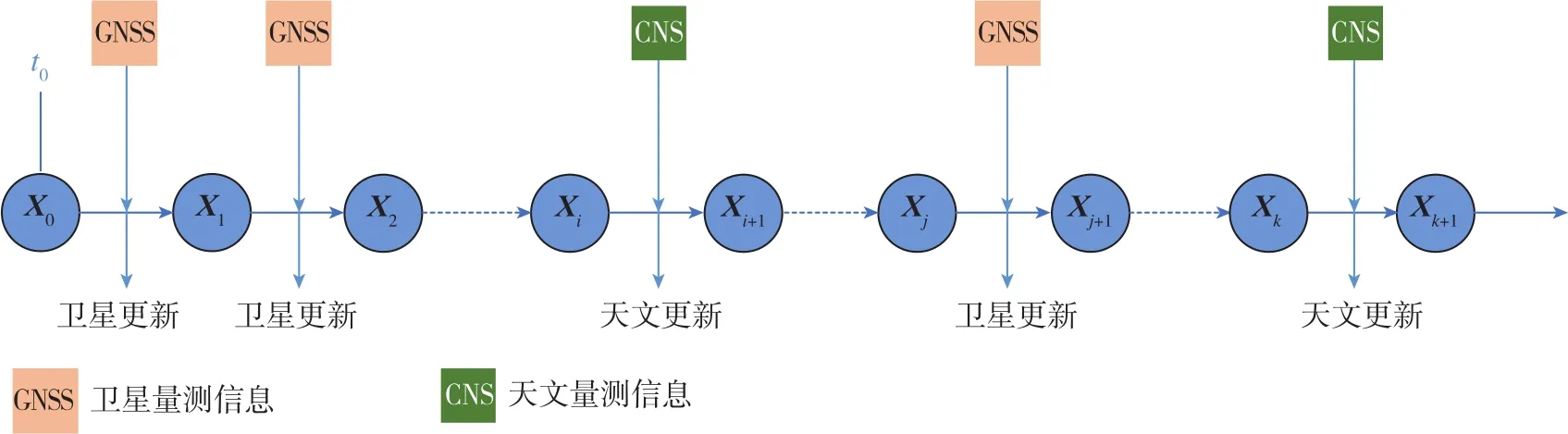
圖2 INS/CNS/GNSS廣義序貫濾波示意圖Fig.2 Schematic diagram of generalized sequential filter in INS/CNS/GNSS
3 仿真驗證
由于星敏感器一般在載機巡航階段及平臺角速度小于5(°)/s的情況下工作,故選用飛行較為平穩的一段真實飛行數據進行空中對準仿真,所采集的飛參數據包含載機姿態角、航向角、慣性導航速度和位置、衛星導航速度和位置等信息。仿真時,使用起始時刻姿態角、航向角、衛星導航速度和位置信息作為初值,使用姿態角、航向角、衛星導航速度的變化率作為軌跡發生器的輸入,來生成陀螺儀和加速度計的輸出以及飛行參數的基準值。載機飛行曲線如圖3所示,飛行軌跡特征點信息如表1所示。設定:陀螺儀常值漂移為 0.008(°)/h,白噪聲為 0.004(°)/h,加速度計常值零偏為5×10-5g;衛星導航系統輸出周期為1s,位置精度為20m,速度精度為0.2m/s;天文導航系統輸出周期為3.5s,星矢量精度為3″,星敏感器視場為2°×2°,星敏感器與慣導安裝誤差標定后殘余誤差為5″。
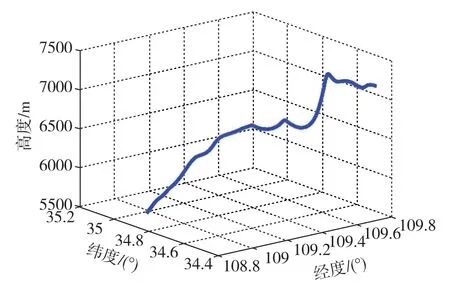
圖3 載機空中飛行曲線Fig.3 Curve of aerial flight

表1 飛行軌跡特征點信息Table 1 Feature point information of flight trace
星敏感器需要慣導為其提供精度0.05°之內的水平姿態信息和視場范圍內的航向信息才可觀測恒星。因此,所提對準算法的仿真分為兩個階段:1)大失準角修正階段,利用衛星導航系統將俯仰角誤差、橫滾角誤差修正到0.05°之內,將航向角誤差修正到2°之內,采用分段修正的方式,總時間設置為90s;2)INS/CNS/GNSS 精對準階段,同時使用衛星信息和天文信息對慣導誤差進行精確修正,時間設置為30s。經過多次Monte Carlo仿真,對比于表1中的基準信息,對準誤差統計如表2所示。

表2 對準誤差統計Table 2 Statistical results of alignment error
圖4給出了 INS/CNS/GNSS空中對準誤差估計曲線。
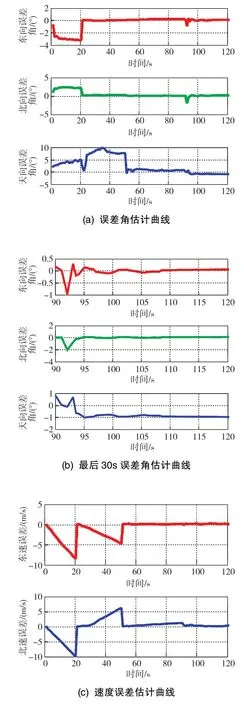
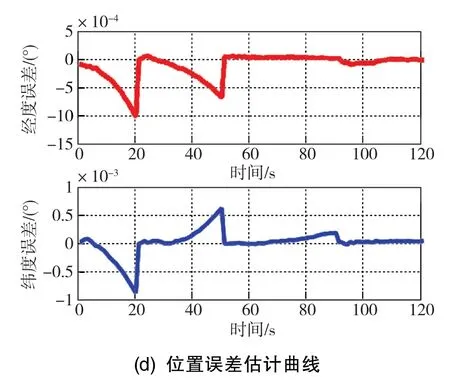
圖4 衛星天文輔助空中對準誤差估計曲線Fig.4 Error estimation curves of CNS/GNSS aided in?flight alignment
可見,本文提出的基于廣義序貫濾波的衛星天文輔助空中對準方法可在2min內完成高精度對準,俯仰角、橫滾角和航向角對準誤差均控制在0.004°之內。在第一階段利用衛星輔助對準修正后,三個角度誤差滿足星敏感器觀星條件。在引入天文量測信息之后,誤差角快速收斂。
衛星天文共同輔助對準算法只有在滿足星敏感器觀星條件的飛行狀態、天氣情況下可達到所論述的對準性能,若對準過程中出現由于云層遮擋等原因造成天文量測信息不可用的情況,慣導依然可以在衛星輔助下完成空中對準,不會造成對準失敗,這是由于算法采用了廣義序貫濾波來處理多源信息融合,使得該對準算法具有較強的可重構性。然而,若此時第二階段依然為30s,則失準角估計無法收斂,對準誤差過大。表2中列出了 2min的 INS/GNSS對準誤差,圖 5給出了2min對準第二階段30s有無天文信息估計曲線對比情況。基于此,在天文量測信息不可用時,須將整個對準時間至少延長至5min。經過多次Monte Carlo仿真,INS/GNSS對準誤差統計于表2中,估計曲線如圖6所示。需要說明的是,圖6中速度誤差和位置誤差估值并非未收斂,而是在跟蹤誤差變化趨勢。

圖5 衛星天文輔助與衛星輔助誤差估計曲線對比Fig.5 Comparison of error estimation curves between CNS/GNSS aided and GNSS aided

圖6 衛星輔助空中對準誤差估計曲線Fig.6 Error estimation curves of GNSS aided in?flight alignment
可見,相比于傳統衛星輔助方法,本文提出的新方法大大提升了對準性能,對準時間縮短至2min。同時,對準精度也提高了1個數量級。
4 結論
在長航時遠程飛機開始配備天文導航設備的背景下,為提升機載慣導空中對準性能,本文提出了一種基于廣義序貫濾波的衛星天文共同輔助慣導進行空中對準的方法。廣義序貫濾波算法一方面解決了衛星導航系統與天文導航系統異步輸出的問題,另一方面也使算法有了較強的可重構性。本文首先建立了衛星天文輔助慣導空中對準的系統模型,然后對廣義序貫濾波算法進行了說明,最后在真實飛行軌跡條件下進行了仿真。仿真結果表明,本文提出的方法能夠將對準時間縮短為2min,同時將對準精度提高了1個數量級,在很大程度上提升了武器裝備的快速反應能力和精確打擊能力,具有較高的工程應用價值。
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
大眾創業(2009年10期)2009-10-08 04:52:00
數字社區&智能家居(2009年7期)2009-09-29 08:16:48
數字社區&智能家居(2009年11期)2009-06-25 04:30:34
數字社區&智能家居(2009年3期)2009-04-21 03:09:04
數字社區&智能家居(2009年2期)2009-03-27 04:33:44
數字社區&智能家居(2009年12期)2009-02-03 07:50:48
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32