多工況下車輛非線性懸架滑模控制器設(shè)計(jì)
2021-02-20 15:59:35于志委茍中華何奇
內(nèi)燃機(jī)與配件 2021年2期
于志委 茍中華 何奇

摘要:本文的目標(biāo)是設(shè)計(jì)一種基于觀測器的高階滑模控制器(HOSMC)。為了模擬路面激勵,建立多工況路面狀態(tài)下不同速度的路面激勵模型,之后建立二自由度非線性懸架模型,并考慮了控制力執(zhí)行機(jī)構(gòu)的動力學(xué)特性。該控制器被分解為兩個回路—內(nèi)環(huán)和外環(huán)。在內(nèi)環(huán)中,設(shè)計(jì)高階滑模控制器來跟蹤混合參考模型的期望狀態(tài);在外環(huán)中,設(shè)計(jì)并應(yīng)用了模糊控制器,根據(jù)滑模表面的到達(dá)情況來調(diào)節(jié)開關(guān)控制增益用來減少滑模控制力的振動影響。仿真結(jié)果表明:該系統(tǒng)可以極準(zhǔn)確地反饋所施加的力,即使在不確定性的情況下;此外,所提出的控制器能有效地改善懸架的性能。
關(guān)鍵詞:多工況行駛;非線性懸架;MATLAB/simulink;HOSMC
中圖分類號: U461.4? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文獻(xiàn)標(biāo)識碼:A? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文章編號:1674-957X(2021)02-0012-03
0? 引言
通常車輛懸架系統(tǒng)是由盤簧、減震器、導(dǎo)向機(jī)構(gòu)和一系列機(jī)械結(jié)構(gòu)組成的。則主動懸架系統(tǒng)不僅能提高懸架性能,還能實(shí)現(xiàn)對車輛更好的控制。在過去幾十年的研究中,針對車輛主動懸架系統(tǒng)許多學(xué)者提出一系列主動控制策略,例如線性二次調(diào)節(jié)、控制控制和自適應(yīng)控制。Vu等通過求解基于線性二次型調(diào)節(jié)器的線性最優(yōu)控制問題。Shukla等采用和最優(yōu)控制器消除不同道路輸入下的車輛振動。Na等提出自適應(yīng)估計(jì)和控制方法,保證懸架響應(yīng)的暫態(tài)和穩(wěn)態(tài)。滑模控制因其結(jié)構(gòu)簡單、控制效果好而在車輛動力學(xué)系統(tǒng)中得到了廣泛的應(yīng)用。由于傳統(tǒng)的滑模控制器(SMC)很難應(yīng)用于參數(shù)未知的復(fù)雜系統(tǒng),許多研究集中在不確定系統(tǒng)的控制算法組合上,如一階滑模控制、分?jǐn)?shù)階滑模控制、滑模變結(jié)構(gòu)控制[1]。
針對具有非線性動力學(xué)特性的主動懸架系統(tǒng),本文提出了基于低階滑模控制的高階控制,并將控制系統(tǒng)分成兩個回路構(gòu)建。針對執(zhí)行器模型固有的非線性和不確定性,采用一種新的自適應(yīng)模糊控制執(zhí)行器的外環(huán),以保持執(zhí)行器力跟蹤期望力軌跡。針對內(nèi)環(huán),設(shè)計(jì)一種基于低階滑模控制的高階滑模控制器;考慮到車懸架模型的非線性,采用無跡卡爾曼濾波(UKF)為外環(huán)控制器提供必要的狀態(tài)變量信息,以減少參考模型和實(shí)際模型的狀態(tài)跟蹤誤差,在適當(dāng)?shù)目刂屏ψ饔孟拢瓜到y(tǒng)達(dá)到期望的狀態(tài)。
1? 多工況路面激勵模型
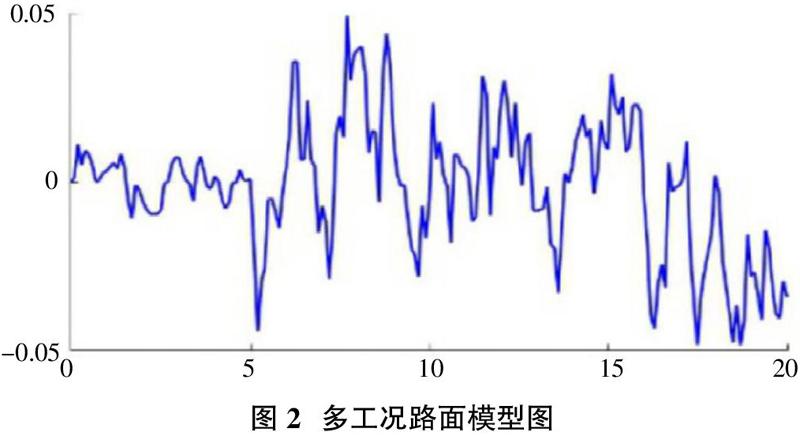
在空間域內(nèi),路面粗糙度可以看作是一個平穩(wěn)的信號,確定路面粗糙度擾動的PSD值如下:
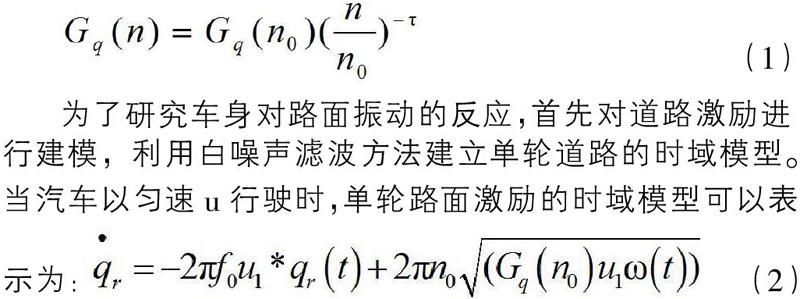
為了研究車身對路面振動的反應(yīng),首先對道路激勵進(jìn)行建模,利用白噪聲濾波方法建立單輪道路的時域模型。當(dāng)汽車以勻速u行駛時,單輪路面激勵的時域模型可以表示為:
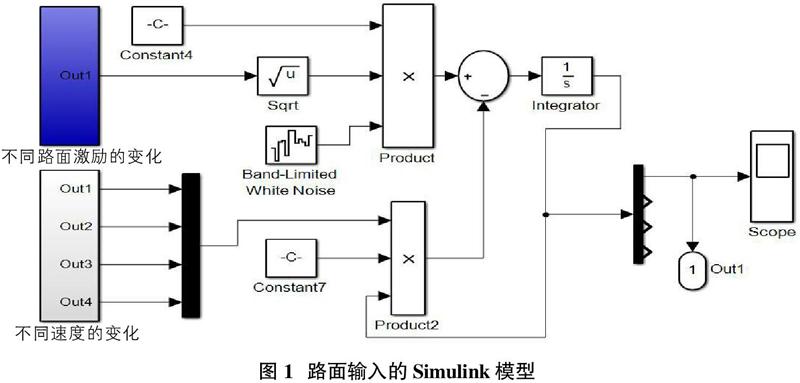
為了更能準(zhǔn)確描述路面模型,本文的路面輸入模型利用clock模塊進(jìn)行不同的路面激勵和速度變化的仿真,路面輸入的Simulink模型如圖1和圖2。
2? 非線性懸架動力學(xué)模型的建立
建立如圖3所示的二自由度汽車垂向振動模型。ms車身質(zhì)量,mu車輪質(zhì)量,k1懸架系統(tǒng)彈簧常數(shù),k2為車輪輪胎彈簧常數(shù),c0為懸架系統(tǒng)阻尼常數(shù),q為路面不平度激勵,xu為車輪垂直位移,xs為車身垂直位移,u為執(zhí)行器力。
懸架彈簧為非線性剛度彈簧,令?著為非線性彈簧系數(shù),則彈簧力為:
選擇懸架的靜止?fàn)顟B(tài)為坐標(biāo)原點(diǎn),從而確定系統(tǒng)的廣義坐標(biāo)。則車輛垂直振動模型的方程為:
將懸架系統(tǒng)的狀態(tài)向量定義為:
轉(zhuǎn)化成狀態(tài)方程為:
式(8)中,X是二自由度主動懸架系統(tǒng)的狀態(tài)矩陣,包括輪胎動載荷、懸架動撓度、簧下質(zhì)量速度和簧載質(zhì)量速度。Y為輸出矩陣,包括車體加速度、輪胎動載荷、懸架動撓度。E是控制力矩陣。其中G(x)是非線性向量函數(shù),Q是外部路面速度激勵干擾矩陣,用于二自由度主動懸架系統(tǒng)建模。A、 B、C、D、E是系數(shù)矩陣。
3? 控制器的設(shè)計(jì)
總體控制算法框圖如圖4所示,內(nèi)環(huán)為基于UKF狀態(tài)觀測器的高階滑模控制,主要目標(biāo)是降低以減少參考模型和實(shí)際模型的狀態(tài)跟蹤誤差,在適當(dāng)?shù)目刂屏ψ饔孟拢瓜到y(tǒng)達(dá)到期望的狀態(tài)。將期望力傳遞到內(nèi)環(huán),通過跟蹤期望力,執(zhí)行器輸出的實(shí)際力滿足外環(huán)的期望力。
3.1 內(nèi)環(huán)控制器的設(shè)計(jì)
內(nèi)環(huán)采用高階滑模控制方法設(shè)計(jì)控制規(guī)律,定義滑模面為:
式中:x1f(t)和x3f(t)是x1(t)和x3(t)的理想?yún)⒖架壽E,滑模面的表達(dá)式如下:
其中,?茁1、?茁2、?茁3、?茁4是滑模面參數(shù),需滿足赫維茨條件,即?茁1,?茁2,?茁3,?茁4>0。 又因?yàn)樵诨C嫔蠞M足是s(t)=0和■(t)=0,則
實(shí)際系統(tǒng)中存在許多不確定性,反饋回路往往受到環(huán)境噪聲的干擾[3],導(dǎo)致實(shí)際系統(tǒng)不能單獨(dú)由等效控制器進(jìn)行控制。引入以下切換控制來克服系統(tǒng)不確定影響:
利用系統(tǒng)方程(4)、等效控制方程(11)和切換控制方程(12),計(jì)算HOSMC主動四分之一車輛懸架系統(tǒng)的內(nèi)環(huán)控制信號如下:
3.2 外環(huán)控制器的設(shè)計(jì)
模糊控制器的解是面積重力法。在模糊控制輸出的情況下,切換控制增益的控制調(diào)整規(guī)則選擇為:
其中G為增益系數(shù)的調(diào)整因子,滿足G>0。
4? 仿真與結(jié)果分析
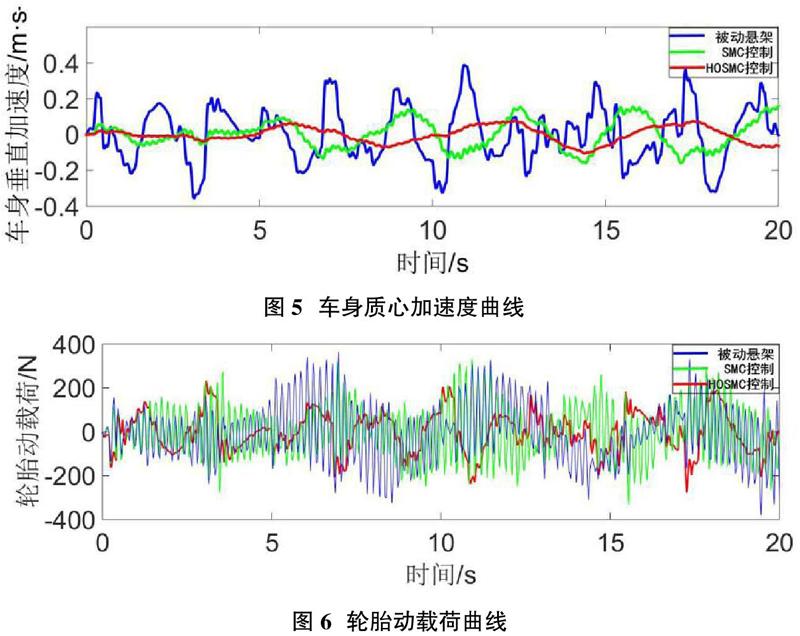
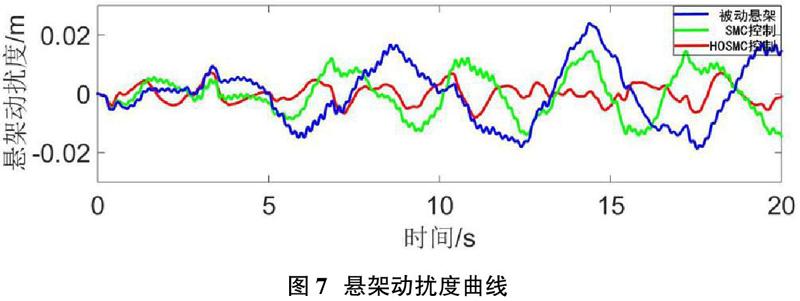
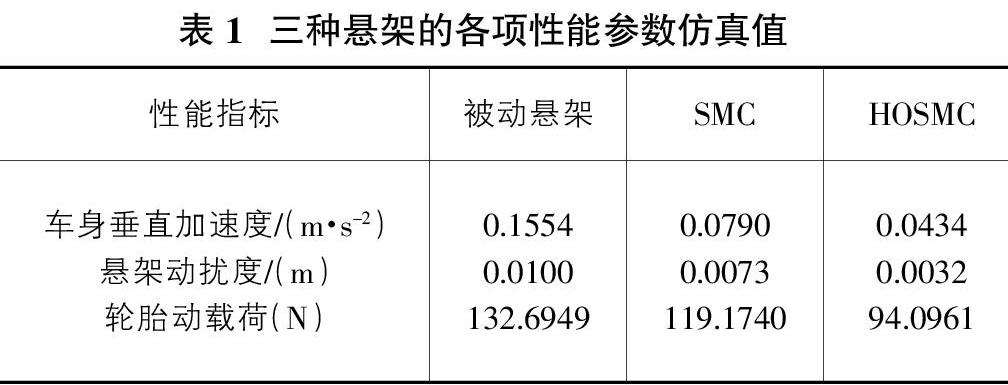
為了更好比較高階滑模控制的魯棒性,在此基礎(chǔ)上引用狀態(tài)觀測器控制。在MATLAB/simulink中建立主動懸架結(jié)構(gòu)模型,連接不同路面不平度,并和被動懸架、一階滑模控制相對比。得到仿真結(jié)果如圖5至圖7所示。
從圖5可以看出,無論是現(xiàn)有的HOSMC控制還是SMC控制,都能明顯減小車身垂直振動加速度,且HOSMC控制減小幅度更大;從圖6可以看出,相對被動懸架,兩種主動懸架的動載荷均有所減少,但減少幅度并不大;從圖7可以看出,相對被動懸架,兩種主動懸架的動擾度均大幅降低,且HOSMC控制振幅更小。
為更精確直觀地反映兩種主動懸架和被動懸架在各工況路面上的各性能指標(biāo),在MATLAB中通過計(jì)算得到了各指標(biāo)的均方根值。
從表1可知HOSMC控制懸架相對現(xiàn)有SMC懸架身垂直加速度減小了20.06%,輪胎動載荷減少2.35%,懸架動擾度則降低了10.98%。
5? 結(jié)論
本文設(shè)計(jì)了一種基于抗擾動的模糊滑模控制邊界層的控制器,并構(gòu)造了觀測器成功地估計(jì)了懸架狀態(tài)。用模糊邏輯控制調(diào)節(jié)滑模控制器的滑模面。所有模型的建立都是為了保持高度非線性的系統(tǒng)穩(wěn)定。在某種程度上,李亞普諾夫穩(wěn)定性得到了保證。一個擴(kuò)展的狀態(tài)觀測器來估計(jì)未知干擾和參數(shù),假設(shè)的外部干擾幾乎被完全隔離。實(shí)驗(yàn)結(jié)果表明,該方法能夠很好地跟蹤動態(tài)輸入信號,能夠抑制輸出擾動和參數(shù)變化,抖振幾乎為零。
參考文獻(xiàn):
[1]秦武,上官文斌,呂輝.非線性二自由度主動懸架滑模控制方法的研究[J].機(jī)械工程學(xué)報(bào),2020,56(01).
[2]高坤明,秦志昌,郭宗和,馬馳騁,馬迎坤.基于多目標(biāo)遺傳算法的主動懸架滑模控制器設(shè)計(jì)[J].三峽大學(xué)學(xué)報(bào)(自然科學(xué)版),2020,42(03):106-112.
[3]Van-Nam Giap,Shyh-Chour Huang. Euuectiveness ou uuzzy sliding mode control boundary layer based on uncertainty and disturbance compensator on suspension active magnetic bearing system[J]. Measurement and Control,2020,53(5-6).