基于分布式協同的雙極直流微電網不平衡電壓控制策略
2021-02-22 05:52:08楊美輝周念成王強鋼廖建權孟瀟瀟
電工技術學報 2021年3期
關鍵詞:一致性
楊美輝 周念成 王強鋼 廖建權 孟瀟瀟
(輸配電裝備及系統安全與新技術國家重點實驗室(重慶大學) 重慶 400044)
0 引言
光伏、儲能等直流型分布式電源的增加促進了直流微電網的發展[1-3]。相比于交流微電網,直流微電網具有結構簡單、控制容易、供電容量大、電能質量高等優點[4-6]。根據是否存在中線,可將直流微電網分為單極和雙極直流微電網[7]。相比于單極直流微電網,雙極直流微電網提供更多電壓等級接口,電壓等級可靈活變換,同時其對 AC-DC變換器的利用率高[8]。此外,當某一極發生故障時,另一極可繼續保持運行,系統具有更高的可靠性和安全性。但正、負極的電源,負荷和線路參數等不平衡會在中線產生不平衡電流,進而增加線路損耗,同時使正、負極母線電壓偏離額定值[9-10]。當某一節點的負荷嚴重不平衡時,不平衡度可能超標,甚至觸發中線的不平衡電壓保護[11]。為靈活調節雙極直流微電網的電壓不平衡度,同時使母線電壓運行在合理范圍內,須采取一定的分布式協同控制策略,保證直流負荷的正常運行。
針對雙極直流微電網的不平衡電壓抑制,目前主要有三種策略[12]:①采用可抑制不平衡電壓的AC-DC變換器;②在AC-DC變換器的出口安裝電壓平衡器;③采用負荷切換開關調整直流負荷的供電極性。文獻[13-14]提出了在雙極直流微電網中,采用三電平變換器抑制直流母線不平衡電壓的控制方法,使直流母線的正、負極電壓達到平衡的同時,實現電網的雙向潮流。文獻[15]和文獻[16]分別針對單端、多端直流微電網,提出了基于電壓平衡器的不平衡電壓抑制方法,并驗證了所提電壓平衡器優異的雙極母線調壓效果。文獻[17]針對雙極直流配電網,提出了一種基于負荷開關在線切換的不平衡電壓抑制策略,該策略比較初始狀態以及負荷開關切換后各節點的不平衡中線電流的大小,確定直流負荷的供電極性,進而在不影響直流負荷電能質量的前提下抑制不平衡電壓。由以上分析可知,雙極直流微電網的不平衡電壓的抑制可從源側和網側出發,通過增加不平衡補償控制環節減小不平衡電流引起的線路損耗和電壓偏差,但均只考慮單個變換器的不平衡電壓抑制,而未考慮不同節點變換器間分布式電源參與不平衡度調節的協調能力。因此應進一步研究雙極直流網絡中不同節點變換器母線電壓及不平衡度的協調控制,當負載和供電功率在大范圍變化時,保證系統穩定運行。
基于一致性理論的分布式協同控制策略結合了集中式控制和分散式控制的優點[18-19],有利于協調多個變換器的不平衡電壓控制。在直流微電網中各單元能夠依據自身和相鄰單元的信息實時更新自身狀態,共同完成協調控制[20-21]。文獻[22]提出了基于一致性理論的單極直流微電網多路直流電力彈簧分布式協同控制策略。該策略不僅實現了平均直流母線電壓的一致,還保持了儲能電池的荷電狀態(State of Change, SOC)平衡。文獻[23]提出了基于一致性理論的多組混合儲能控制方法,不僅有效提升了直流母線電壓水平,還實現了不同類儲能間的功率分配。文獻[24]提出了基于有限時間一致性理論的分布式協同控制策略,實現了直流微電網的電壓穩定以及發電成本最小等多目標控制。文獻[25]針對含有容性負載的直流微電網,基于一致性理論建立了容性負載電壓觀測器,實現了微電網的負載均衡控制。文獻[26]在實現直流母線電壓均值維持在額定值的基礎上,提出了一種PI一致性控制電壓優化策略,保證了各直流微電網中母線電壓偏離額定值的偏差和最小。以上研究均針對單極直流微電網中不同變換器間的協調控制,而未考慮雙極直流微電網結構。雙極直流微電網因其系統結構中含有中性線,極間電壓不平衡成為其特有的電能質量問題,負載功率、網絡結構參數等電氣量的不平衡及中線阻抗上的壓降均會使正、負極電壓進一步偏離額定值,從而對直流母線電壓偏差補償及雙極直流微電網的功率分配產生影響。因此針對雙極直流微電網,還需設計專門的極間不平衡電壓控制器,控制正、負極電壓的不平衡度在合理范圍內,才能保證系統的穩定、可靠運行。
本文將一致性理論應用到雙極直流微電網的不平衡電壓控制中,通過對多個分布式電源變換器的分布式協同控制,實現雙極直流微電網的不平衡電壓控制。文中在雙極直流微電網的一次控制中采用電壓下垂控制,同時根據一致性理論,結合電壓不平衡度與正負極電壓之間的關系,提出雙極直流微電網的分布式協同控制策略。通過設計不平衡電壓觀測器和不平衡度控制器,使母線電壓維持在額定值,并實現了極間電壓不平衡度趨于一致。通過對系統進行穩定性分析,從理論上驗證了所提控制策略的穩定性和可靠性。最后在Matlab/Simulink中建立雙極直流微電網仿真模型,并搭建實驗平臺,仿真及實驗結果表明所提控制策略不僅在電網常規運行中有效,在負載變化和通信網絡變化時同樣具有良好的有效性。
1 雙極直流微電網結構及建模分析
1.1 系統建模
本文研究的雙極直流微電網結構如圖1所示。該網絡包含物理層和網絡層,其中物理層包括分布式電源(DG)、直流變換器(DC-DC)、低壓直流負載及正線(P線)、中性線(O線)和負線(N線)三條直流母線。DG經由DC-DC變換器接入直流母線,低壓直流負載接在PO或NO之間。DG及DCDC變換器在實現傳統穩壓功能的基礎上,還可抑制由于電源和負載不平衡導致的功率波動,并減小不同擾動對系統電壓質量的影響。網絡層可方便多個直流變換器進行信息交換,在電壓不平衡度一致性控制中,將正極和負極相對應的直流變換器視為同一個節點,而在母線平均電壓控制中將正、負極的直流變換器視為不同節點。各節點間通過稀疏的通信網絡連接,并與相鄰節點交換控制變量的信息,更新自身控制信息,達到控制變量的全局一致性。
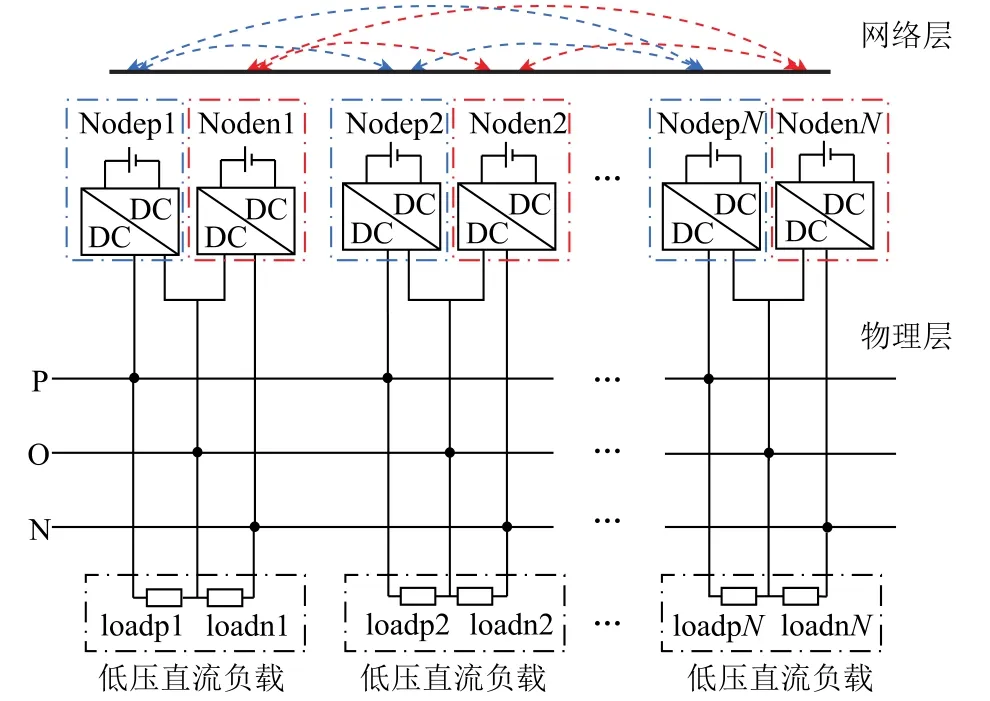
圖1 雙極直流微電網結構示意圖Fig.1 The schematic diagram of bipolar DC microgrid structure
1.2 不平衡電壓分析
當正、負極負荷功率不相等時,正、負極電壓會產生偏差,即電壓不平衡。不平衡度是評估雙極直流微電網電壓不平衡的一項指標,若電壓不平衡度超出設定范圍,可能導致微電網運行損耗增加,同時影響直流負荷的正常工作。為保證雙極直流微電網的穩定運行,根據ANSI C84,建議將電壓不平衡度限制在3%以內[6,27],文獻[6,27]中定義第i個節點的電壓不平衡度為
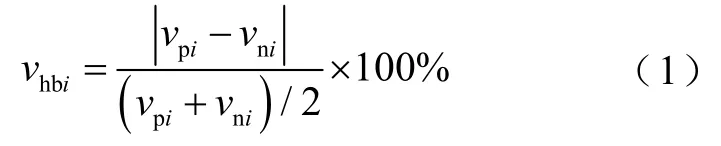
式中,vhbi為第i個節點的不平衡度;vpi、vni分別為正、負極母線電壓,下標p、n分別為正、負極。
為進一步分析電壓不平衡度與雙極直流微電網中系統參數的定量關系,得到正、負極輸出電壓變化與不平衡度的關系,文獻[16]對恒阻抗負載和恒功率負載均進行了不平衡電壓分析。本文以恒阻抗負載為研究對象,采用圖2所示的簡化模型進行分析。
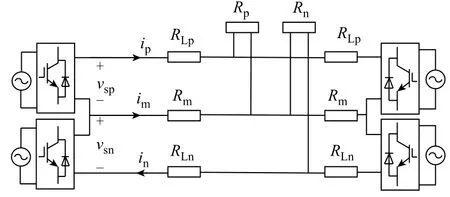
圖2 雙極直流微電網簡化模型Fig.2 Simplified model of bipolar DC microgrid
該簡化模型中節點電壓和電流滿足

式中,Rp、Rn分別為正、負極負載;RLp、RLn、Rm分別為正極、負極、中線線路電阻;ip、in、im分別為正極、負極、中線電流;vsp、vsn分別為正、負極輸出電壓。在本文中正、負極線路阻抗相等,即RLp=RLn=RL。
求解式(2),可得不平衡度與負載、中線電阻及正、負極電源電壓的關系為
令Rp=20Ω,Rn=10Ω,本文雙極直流微電網母線電壓的參考值為 400V,為保證電壓的合理性,使正、負極電源電壓分別在380~420V之間變化。根據式(3),得到雙極直流微電網電壓不平衡度隨正、負極輸出電壓變化的三維圖,如圖3所示。
由圖3可知:正、負極輸出電壓平衡時,極間電壓不平衡度較小,但隨著輸出電壓不平衡增大,電壓不平衡度隨之增大,甚至超出ANSI C84建議限定范圍的3%,影響雙極直流微電網的穩定運行。為保證雙極直流微電網電壓不平衡度在允許范圍的3%以內,正、負極電壓應在一定范圍內,如圖3中x-y平面陰影部分所示。可以設計相應的分布式協同控制策略,合理調配不同分布式電源參與不平衡度調節,同時調節正、負極輸出電壓,將電壓不平衡度控制在合理范圍或某一限定值。
圖3 電壓不平衡度隨正、負極輸出電壓變化規律Fig.3 The voltage unbalance factor varies with the positive and negative output voltage
2 基于分布式協同的不平衡電壓控制
2.1 電壓下垂控制
在雙極直流微電網中,為了降低因功率不平衡而造成的母線電壓偏差,本文采用一次控制和二次控制相結合的分布式協同控制。完整的分布式協同控制方案如圖4所示。一次控制采用電壓下垂控制,主要調節直流變換器的輸出電壓[28];二次控制則進一步調整一次控制產生的電壓、功率偏差。圖4中i表示雙極直流微電網中的第i個分布式電源,j、k表示與i節點有通信聯絡的相鄰分布式電源,下標p、n分別表示正、負極。
圖4 完整分布式協同控制方案Fig.4 The complete distributed cooperative control scheme
在控制方案中,采用下垂控制作為一次控制,實現多個變換器并聯運行時負荷功率的自動分配,維持系統穩定運行。一次控制包括電壓下垂控制器和虛擬阻抗環,虛擬阻抗環按式(4)設計。
式中,Rdpi、Rdni分別為正、負極虛擬阻抗;ipi、ini分別為正、負極負載電流;vdpi、vdni分別為虛擬阻抗的輸出電壓,即輸出電流的比例部分,能使電壓基準值隨電流的增加而減小。將虛擬阻抗環的輸出電壓vdpi和vdni與電壓的基準值相減,差值通過PI下垂控制器,生成控制 DC-DC變換器開關的占空比d。一次控制中采用虛擬阻抗實現電壓下垂控制,但虛擬阻抗引起的電壓下降會產生電壓偏差,選用較小的虛擬阻抗電壓偏差小,但是易造成微電網的不穩定,因此需合理選擇虛擬阻抗的大小。
2.2 不平衡平均電壓二次控制
電壓下垂控制無法完全消除直流母線電壓偏差,而基于平均動態一致性理論的分布式協同控制可根據自身及相鄰節點數據信息實現協同控制,其基本原理為

式中,iξ和jξ分別為節點i和節點j的狀態變量;aij為節點i和節點j進行信息交換的通信權重。平均一致性算法的通信網絡可用圖表表示,其圖表的拉普拉斯矩陣L=[lij]∈RN×N,滿足
二次控制在為一次控制提供參考電壓的同時,還需協調電壓不平衡度和母線平均電壓趨于一致,以減小功率波動較大時電壓失衡。由于線路阻抗的存在,不同直流變換器接入點的母線電壓不同,為獲得直流母線電壓的平均值,構建如圖4中所示的不平衡電壓觀測器。對圖1所示的雙極直流微電網,根據平均一致性算法,第i個直流變換器直流母線平均電壓為
式中,j節點為一致性算法通信網絡中與i節點關聯的節點;vavgpi、vavgpj和vavgni、vavgnj分別為正、負極第i個和第j個電壓觀測器輸出的母線平均電壓。
不平衡電壓觀測器可結合自身和相鄰單元的信息實時更新下一時刻的平均電壓輸出量,進而有效估計雙極直流微電網的母線平均電壓。將直流母線額定參考電壓vref與母線平均電壓vavgpi、vavgni間的誤差項通過比例積分控制器處理,生成母線電壓的修正項。
2.3 不平衡度二次控制
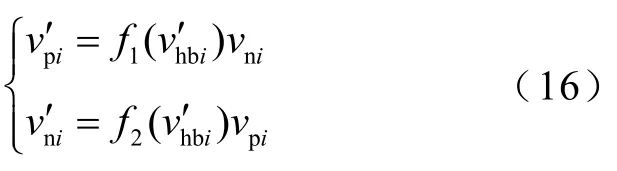
為使電網中各節點在運行過程中的電壓不平衡度趨于一致,減小電壓不平衡度對雙極直流微電網穩定運行的影響,設置如圖4所示的不平衡度控制器。根據平均一致性算法,可以得到期望的電壓不平衡度為

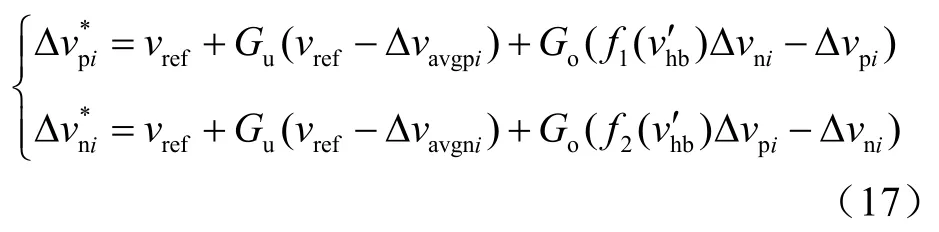
將不平衡電壓觀測器和不平衡度控制器得到的兩個修正項加到母線額定參考電壓,可得雙極直流微電網電壓下垂控制的參考電壓為
3 雙極直流微電網小信號穩定分析
為研究雙極直流微電網系統的小信號穩定性,本文建立控制策略的小信號模型,并通過根軌跡及 Nyquist圖分析所提控制策略對系統穩定性的影響。
在雙極直流微電網中,分布式電源通過DC-DC變換器接入直流母線,在忽略變換器開關損耗后,其輸入輸出特性為
式中,vspi、vsni分別為i節點正、負極電源電壓;iLpi、iLpi分別為i節點正、負極電感電流;rspi、rsni分別為i節點正、負極電源內阻;C0為濾波電容。對式(13)進行線性處理可得
式中,vopi、voni分別為系統穩定時的正、負極母線電壓;iopi、ioni和iLopi、iLoni分別為系統穩定時的正、負極負載電流和電感電流。
根據式(14)可得控制系統的一次控制動態結構圖如圖5a所示。該系統以參考電壓電流Δipi(或Δini)為輸入量,母線電壓Δvpi(或Δvni)為輸出量,化簡框圖,再根據歐姆定律可得到以為輸入,Δvpi(或 Δvni)為輸出的一次控制的傳遞函數為
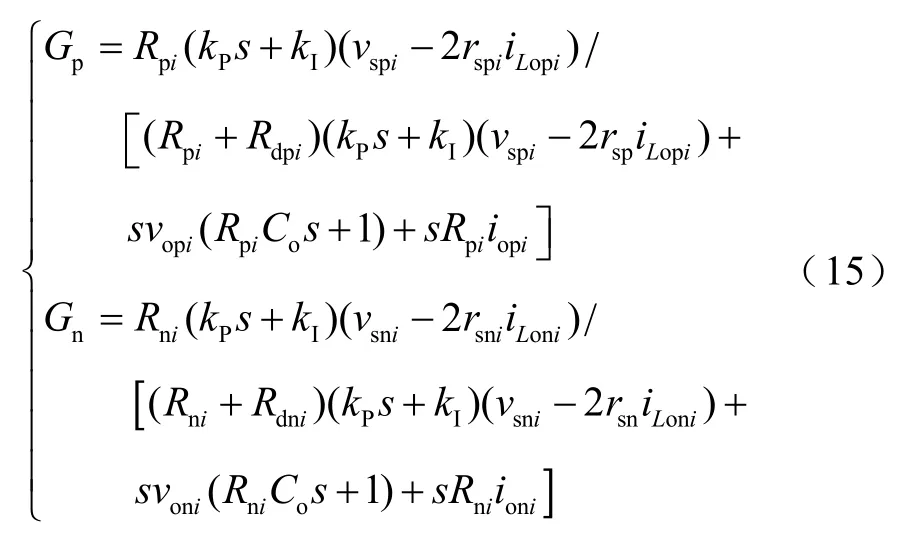
式中,Gp、Gn分別為正、負極一次控制的傳遞函數;kP和kI分別為一次控制中 PI的比例系數和積分系數;Rpi和Rni分別為i節點正、負極負載。
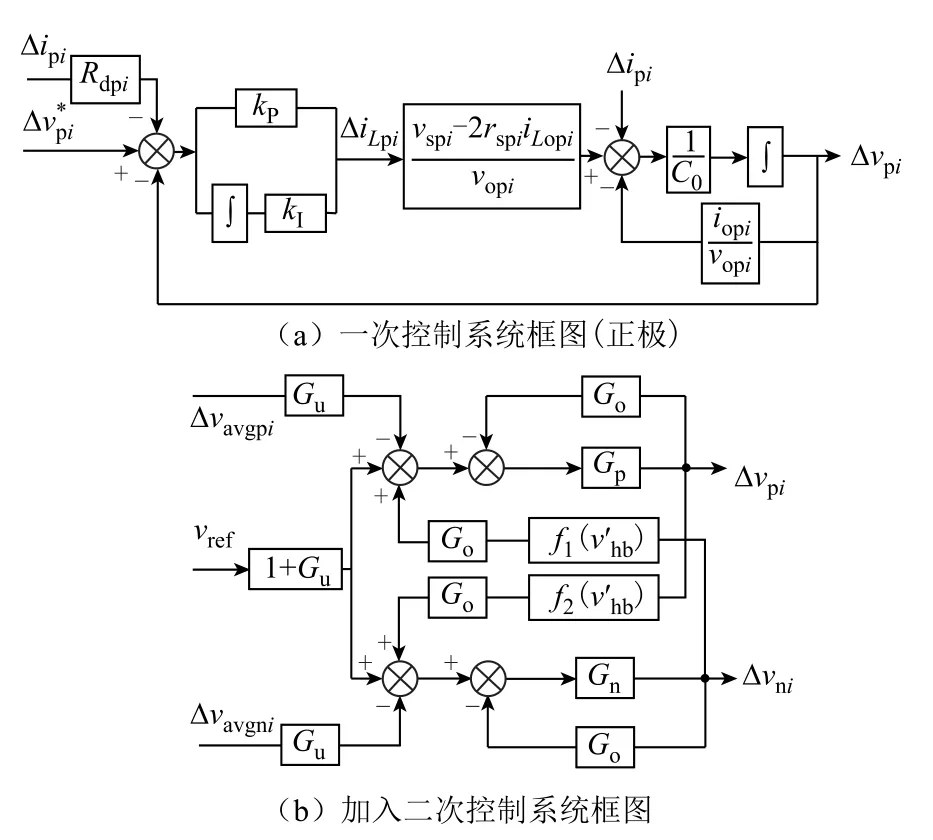
圖5 控制系統框圖Fig.5 The structure of control system
由式(8)、式(11)、式(12)和式(16)可知一次控制中的輸入量為
式中,Gu和Go分別為平均電壓觀測器和不平衡度控制器的PI傳遞函數,且滿足
式中,kPV、kIV分別為不平衡電壓觀測器的比例系數和積分系數;kPhb、kIhb分別為不平衡度控制器的比例系數和積分系數。
聯立式(15)、式(17)、式(18)并化簡可得雙極直流微電網加入二次控制后的系統框圖如圖5b所示。由系統框圖可知,雙極直流微電網中正、負極之間存在耦合,結合式(7)中平均母線電壓與母線電壓的關系,通過化簡可得以vref為輸入,Δvpi(或Δvni)為輸出的系統傳遞函數,并進行小信號穩定性分析。
依次在二次控制中加入平均電壓觀測器和不平衡度控制器,得到以vref為輸入,Δvpi(或Δvni)的控制系統的根軌跡和Nyquist圖如圖6和圖7所示。由圖6可知,其根軌跡系統零極點均位于負半平面,且遠離虛軸;由圖7所示,不平衡度控制器加入前后系統的Nyquist圖不包圍(-1,j0)點,系統穩定。
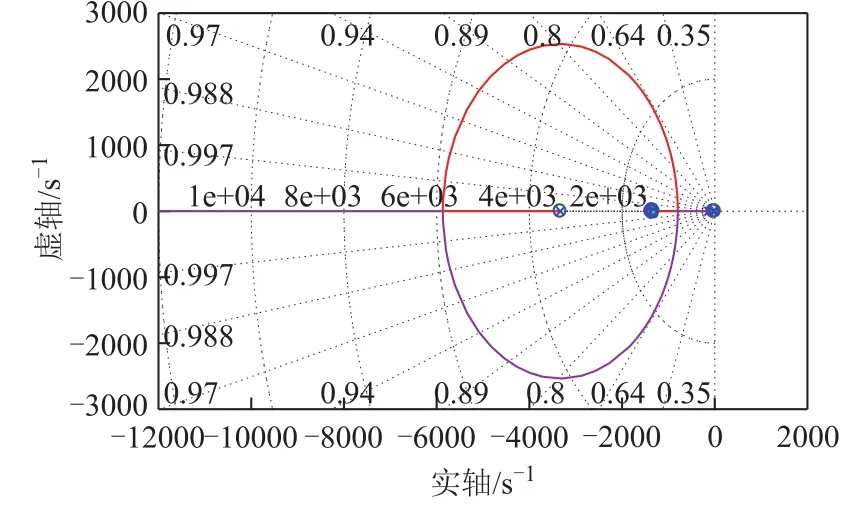
圖6 加入平均電壓觀測器而未加不平衡度控制器時根軌跡Fig.6 Root locus when the average voltage observer is added without the unbalance factor controller
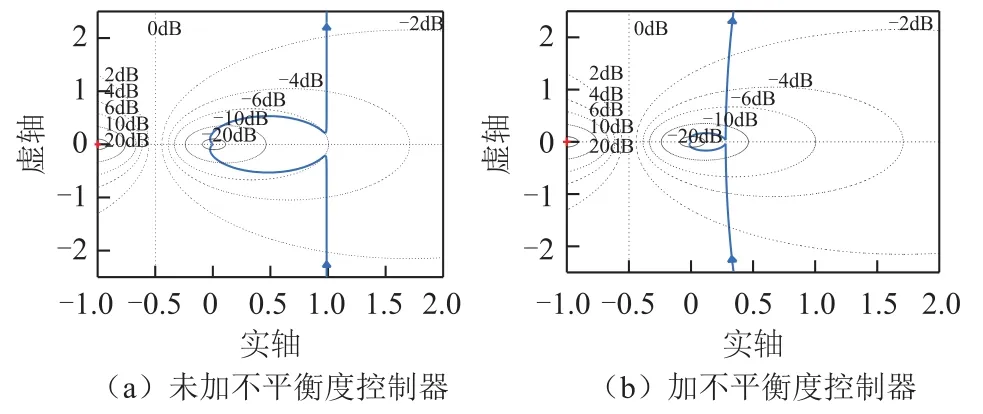
圖7 加入平均電壓觀測器的控制系統Nyquist圖Fig.7 The figure of Nyquist with average voltage observer
4 仿真及實驗驗證
4.1 仿真驗證
為驗證所提控制策略的有效性,在 Matlab/Simulink中搭建圖8所示的仿真模型,其中母線平均電壓、不平衡度一致性控制(不平衡度參考值xref為0.5%)的通信拓撲分別如圖9a、圖9b所示。通信拓撲采用雙向環形拓撲,在某一通信鏈路失效時依然能夠保證通信的可靠性[19-20]。

圖8 仿真結構示意圖Fig.8 The schematic diagram of simulation structure
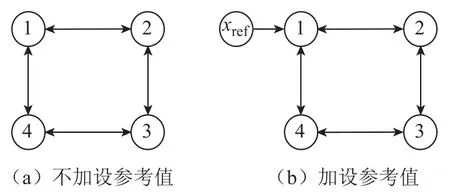
圖9 通信拓撲結構Fig.9 Communication topology
在平均電壓一致性控制設計中,采用 0-1權重的鄰接矩陣為
由于不平衡度一致性控制中增加了電壓不平衡度參考值,其0-1權重的鄰接矩陣為
初始時刻,正極各節點的負載分別為Rp1=10Ω、Rp2=20Ω、Rp3=20Ω、Rp4=20Ω,負極各節點的負載分別為Rn1=20Ω、Rn2=40Ω、Rn3=20Ω、Rn4=5Ω,仿真模型和控制器的相關參數見表1。
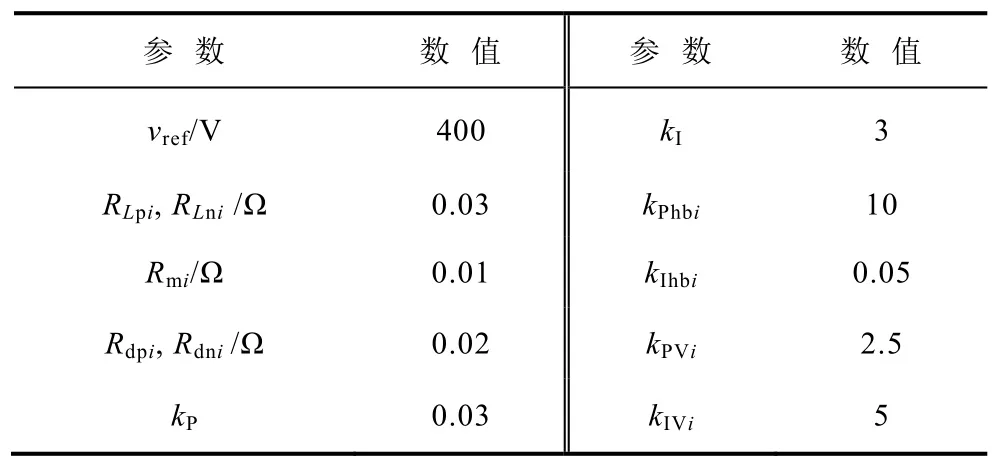
表1 系統參數Tab.1 The system parameters
算例1:本文所提出的基于一致性算法的二次控制本質上是對下垂控制的改進,通過動態平均電壓和不平衡度一致性算法,用以補償下垂控制的初始參考電壓,并通過相鄰節點間的通信達到雙極直流微電網平均電壓和不平衡度的一致。在下垂控制的改進方法中,有通過算術平均法求取系統狀態量均值,再利用偏差信號進行調節的輸出補償。文獻[29]基于算術平均法動態調節下垂控制參考電壓,實現了直流微電網中分布式儲能單元SOC均衡以及負荷功率的動態分配。為驗證本文控制方案的有效性,系統采用電壓下垂控制作為一次控制,首先在二次控制中僅投入本文不平衡電壓觀測器,不平衡度控制器未投入;然后采用文獻[29]中的控制算法作為二次控制投入;最后在雙極直流微電網中投入本文所提出的完整二次控制策略,即同時投入不平衡電壓觀測器和不平衡度控制器。各仿真結果如圖 10所示。
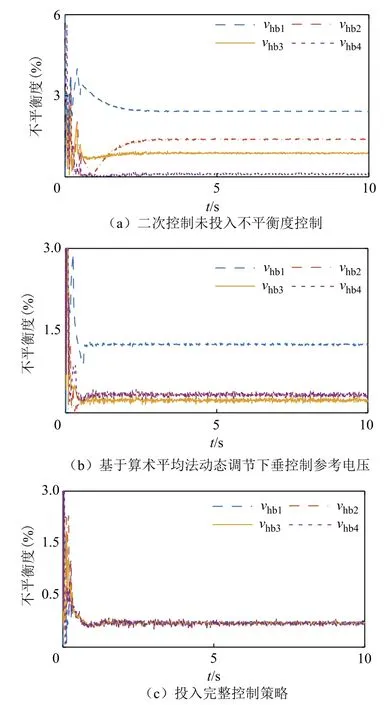
圖10 不同控制下系統電壓不平衡度Fig.10 The voltage unbalance factor of system under different control
由圖10a可知,由于二次控制中僅投入電壓觀測器,沒有電壓不平衡度控制器,各正、負極節點的不平衡度不收斂,且節點1的電壓不平衡度遠大于其他節點,甚至接近不平衡度的限制 3%。由圖10b可知,采用基于算術平均法動態調節下垂控制的參考電壓,各正、負極節點的不平衡度得到調節,各節點間不平衡度在限定范圍內差值減小,但仍存在偏差且不趨于一致。由圖10c可知,本文控制策略完全投入后,在電壓不平衡度控制器作用下,各正、負極節點的不平衡度趨于一致,且能收斂于參考值0.5%,與圖10a與圖10b相比,極間電壓不平衡明顯得到改善。
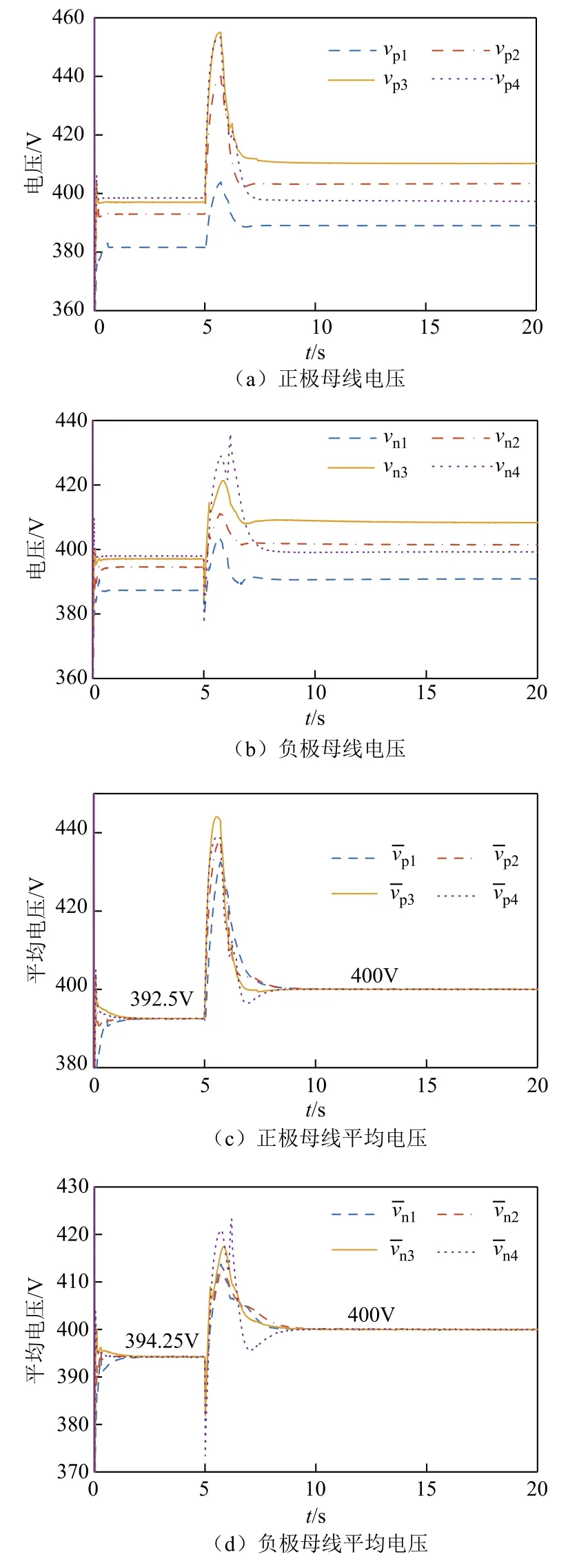
圖11 二次控制投入系統電壓響應Fig.11 The voltage response of the system with secondary control input
算例2:0~5s,系統僅采用電壓下垂一次控制;5~20s時,投入本文所提出的完整二次控制。在上述模型參數的設置下,仿真結果如圖11所示。由圖11可知,0~5s,由于存在直流線路阻抗,正、負極直流母線電壓均偏離額定值400V,此外,正極母線平均電壓為 392.5V,負極母線平均電壓為 394.25V。由圖11a和圖11b可知,在5s投入二次控制后,正、負極母線電壓均上升,但由于線路阻抗的存在,正、負極母線電壓與額定值不同,但均接近于額定值400V。由圖11c和圖11d可知,在二次控制投入后,由于各母線電壓的抬升,正、負極母線平均電壓可以穩定在額定值400V,平均電壓偏差減小到0。
算例3:6s時將負載A(160kW)并聯投入正極第4個節點,13s時將負載B(32kW)并聯投入到負極第2節點,仿真結果如圖12所示。由圖12a可知,負載變化時,不平衡電壓觀測器輸出的母線平均電壓均會收斂于額定值。由圖12b可知,不平衡度控制器能夠在正、負極負載發生變化時快速響應,將網絡中各節點的不平衡度收斂于同一值,即參考值0.5%,實現正、負極直流母線電壓的平衡。
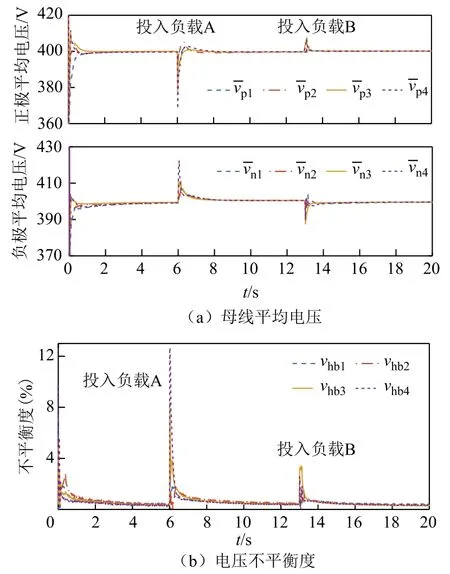
圖12 負載變化系統響應Fig.12 System response to load changes
算例4:一致性算法中,通信權重aij不僅能有效反映雙極直流微電網中的節點信息,還會影響系統狀態變量一致性的收斂速度。為驗證通信權重aij對電壓不平衡控制的影響,在其余系統參數均相同的條件下,改變通信權重aij值,得到其與系統相應調節時間的關系如圖13所示。由圖13可知,通信權重aij越大,系統調節時間越短,收斂速度越快。取通信權重aij值分別為2和10,并且5s時在正極第4個節點并聯增加32kW的負載。此時系統電壓不平衡度曲線和正極母線平均電壓如圖14所示。由圖14a和圖14b可知,當負載發生變化時,aij=10時電壓不平衡度曲線和母線平均電壓的收斂速度更快,更容易趨于一致。
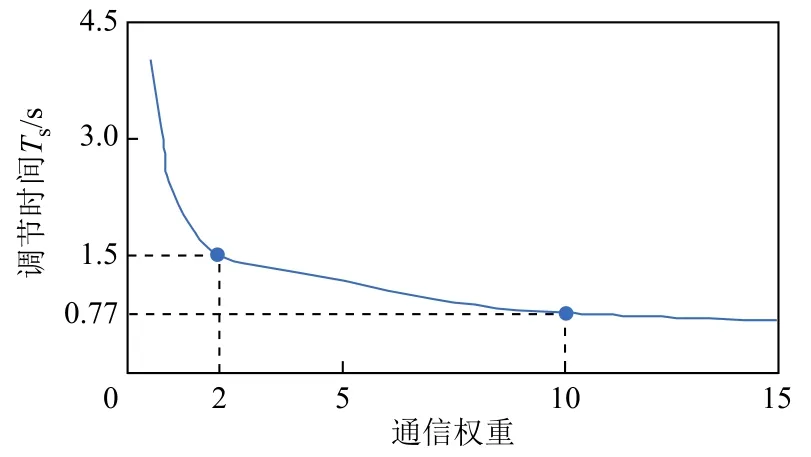
圖13 通信權重與調節時間關系Fig.13 The relationship between communication weight and adjustment time
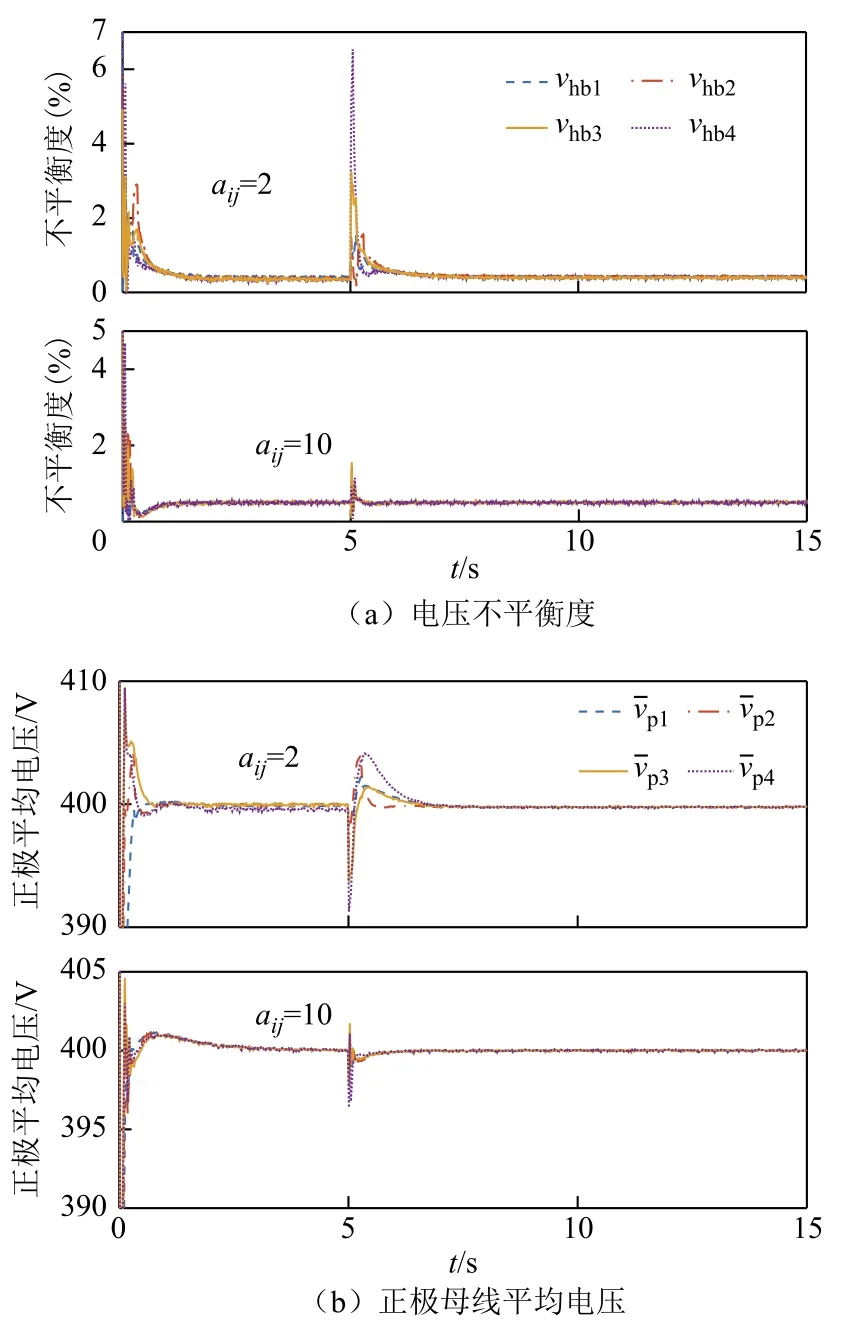
圖14 通信網絡變化系統響應Fig.14 The system response to changes in communication networks
4.2 實驗驗證
本實驗搭建如圖 15所示的實驗平臺來驗證所提出的雙極直流微電網不平衡電壓控制策略的正確性和有效性。實驗平臺由8個直流源(正、負極各4個)、DC-DC變換器、通信模塊、電阻負載等組成,實驗中直流源設置為 24V,線阻為 1Ω,負載為 20Ω左右不均,母線電壓額定參考電壓設置為12V。
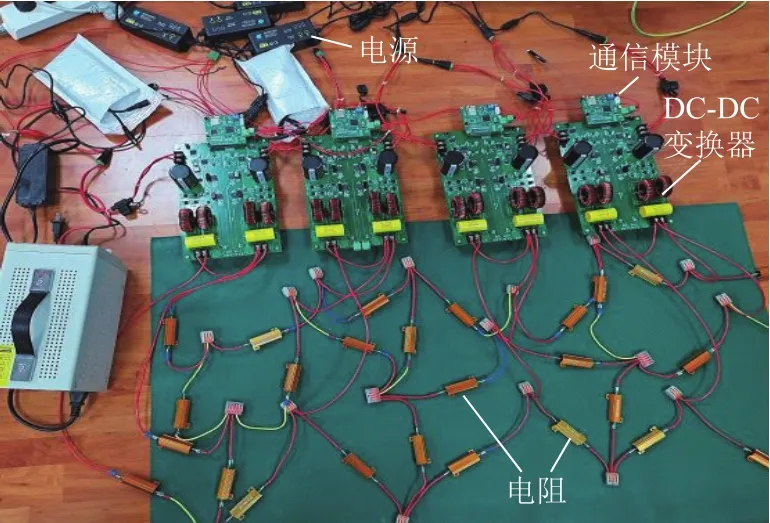
圖15 實驗平臺Fig.15 The experiment platform
實驗初始時刻,正、負極直流電源變換器僅由一次下垂控制控制,在t1時刻啟動二次控制,正、負極直流母線電壓波形如圖16a所示。初始時刻,正、負極各4個節點的母線電壓均存在電壓偏差,平均電壓估計低于12V。啟動二次控制后,盡管正、負極直流母線電壓沒有保持在12V,但是母線電壓均有所抬升,母線平均電壓也會有所提高,并可以保持在額定值12V。通過實驗中直流電壓數據計算得到電壓不平衡度如圖16b所示。由圖16b可知,在一致性控制作用下,雙極直流微電網中各節點的電壓不平衡度明顯降低,且均穩定在1.3%左右,基本達到一致。
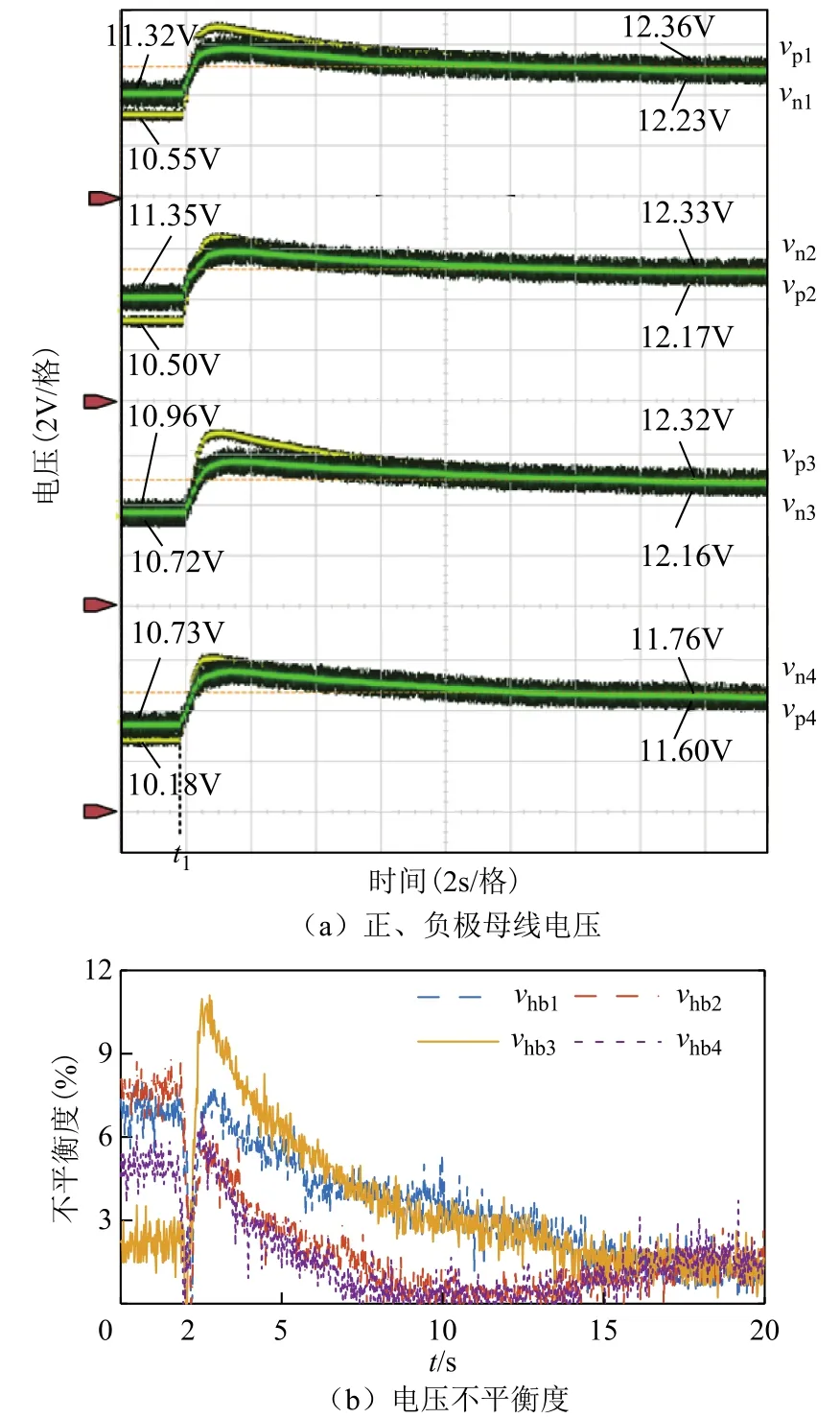
圖16 實驗結果Fig.16 The experimental results
5 結論
本文提出了雙極直流微電網的不平衡電壓的分布式協同控制策略,并通過仿真算例及實驗對該控制策略進行驗證,結果表明:
1)通過設置電壓觀測器,可在負荷及網絡參數變化時,動態調整各負荷節點的電壓參考值,通過減小母線電壓與額定值之間的偏差,提升雙極直流微電網電壓質量,并實現網絡的正、負極母線平均電壓趨于一致。
2)在電壓觀測器的基礎上,增加不平衡度控制器,可使網絡中各負荷節點的電壓不平衡度趨于一致,從而最大限度地利用分布式電源的電壓調節能力,減小功率波動較大時的電壓失衡,有利于雙極直流微電網的功率平衡。
3)在電壓下垂控制的基礎上增加一致性控制,可達到雙極直流微電網的分布式協同控制。該控制策略可靈活應對負荷及通信網絡時變的情況,保證直流負荷及整個雙極直流微電網的正常、穩定運行。
猜你喜歡
遼寧教育(2022年19期)2022-11-18 07:20:42
公民與法治(2022年5期)2022-07-29 00:47:28
汽車實用技術(2022年9期)2022-05-20 05:51:26
教學考試(高考物理)(2021年5期)2021-11-08 10:31:22
歷史教學問題(2021年4期)2021-11-05 07:02:34
中醫眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
裝備制造技術(2020年11期)2021-01-26 00:39:12
中國公共安全(2017年11期)2017-02-06 05:28:08
電測與儀表(2016年7期)2016-04-12 00:22:18
燕山大學學報(2015年4期)2015-12-25 02:19:49