一種輪式移動(dòng)機(jī)器人滑模軌跡跟蹤控制器設(shè)計(jì)及其參數(shù)優(yōu)化方法
2021-02-23 11:52:08高興泉丁三毛黃東冬劉志成肖新宇
吉林化工學(xué)院學(xué)報(bào) 2021年1期
高興泉,丁三毛,黃東冬,劉志成,肖新宇
(吉林化工學(xué)院 信息與控制工程學(xué)院,吉林 吉林 132022)
目前,為了讓輪式移動(dòng)機(jī)器人完成對(duì)復(fù)雜軌跡的跟蹤,常運(yùn)用PID、自適應(yīng)、反演等算法設(shè)計(jì)軌跡跟蹤控制器[1].在種類繁多的控制方法中,建構(gòu)簡(jiǎn)單、魯棒性強(qiáng)的滑模變結(jié)構(gòu)算法被廣泛用于輪式移動(dòng)機(jī)器人軌跡跟蹤控制[2].一個(gè)控制性能優(yōu)良的滑模控制器,可以使輪式移動(dòng)機(jī)器人更加穩(wěn)定、快速、精確地完成跟蹤控制.在設(shè)計(jì)滑模控制器時(shí),趨近律的選擇
尤為重要,會(huì)直接影響控制器的性能,依據(jù)被控對(duì)象的特點(diǎn)設(shè)置適合的控制器,能夠使控制效果更好[1-3].其中指數(shù)趨近律在眾多趨近律中具有結(jié)構(gòu)簡(jiǎn)單、趨近速度快的優(yōu)點(diǎn),能夠在最短時(shí)間內(nèi)實(shí)現(xiàn)收斂.本文一共設(shè)計(jì)3個(gè)指數(shù)趨近律,其中外環(huán)由兩個(gè)指數(shù)趨近律設(shè)計(jì),實(shí)現(xiàn)輪式機(jī)器人位置在x軸與y軸兩個(gè)分量的跟蹤控制,內(nèi)環(huán)由一個(gè)指數(shù)趨近律設(shè)計(jì),實(shí)現(xiàn)輪式移動(dòng)機(jī)器人在運(yùn)動(dòng)時(shí)對(duì)位姿角的跟蹤[3-4],然后將所設(shè)計(jì)的控制器分別進(jìn)行Lyapunov穩(wěn)定證明確保每個(gè)控制器都能漸近穩(wěn)定.
在對(duì)滑模控制器設(shè)計(jì)時(shí),參數(shù)的整定也是設(shè)計(jì)的難點(diǎn).一組好的參數(shù)能夠大大提高跟蹤的速度,也能夠削弱抖振現(xiàn)象.起初一般是人工根據(jù)經(jīng)驗(yàn)對(duì)參數(shù)進(jìn)行試湊整定,導(dǎo)致在選擇上出現(xiàn)較大的隨機(jī)性,較難選出較精確的參數(shù),跟蹤品質(zhì)較差[5].隨著控制品質(zhì)的不斷增加,簡(jiǎn)單的人工隨機(jī)調(diào)參已經(jīng)無(wú)法滿足高品質(zhì)的控制需求,而計(jì)算機(jī)技術(shù)的發(fā)展給復(fù)雜的調(diào)參帶來(lái)了曙光.科研人員很好的利用計(jì)算機(jī)的高速計(jì)算能力,經(jīng)過(guò)多次迭代,進(jìn)而尋找到一組最優(yōu)的參數(shù),使控制效果更好.在眾多優(yōu)化算法中,蟻群算法、遺傳算法和粒子群算法等群智能算法可以解決滑模控制器參數(shù)選擇這一復(fù)雜問(wèn)題[6].與其他算法相比,粒子群可以尋找最優(yōu)解、算法設(shè)計(jì)簡(jiǎn)單易懂等優(yōu)點(diǎn),在工程實(shí)驗(yàn)中應(yīng)用比較廣泛.本文在設(shè)計(jì)在完滑模控制器后,為達(dá)到更好的控制效果,利用粒子群優(yōu)化算法強(qiáng)大的尋優(yōu)功能搜尋出一組最優(yōu)參數(shù),更好更快地實(shí)現(xiàn)輪式移動(dòng)機(jī)器人軌跡跟蹤控制,粒子群算法的加入大大降低了人工調(diào)參的隨機(jī)性和耗時(shí)性[5].
1 全動(dòng)態(tài)誤差模型的建立及問(wèn)題描述
根據(jù)圖1,本文所使用的輪式移動(dòng)機(jī)器人模型有3個(gè)輪子,其中前面的輪子為導(dǎo)向輪,使輪式機(jī)器人轉(zhuǎn)彎更加靈活并保持輪式移動(dòng)機(jī)器人的平衡,后面兩個(gè)輪子為驅(qū)動(dòng)輪,為機(jī)器人的運(yùn)動(dòng)提高力矩及實(shí)現(xiàn)差速轉(zhuǎn)彎.
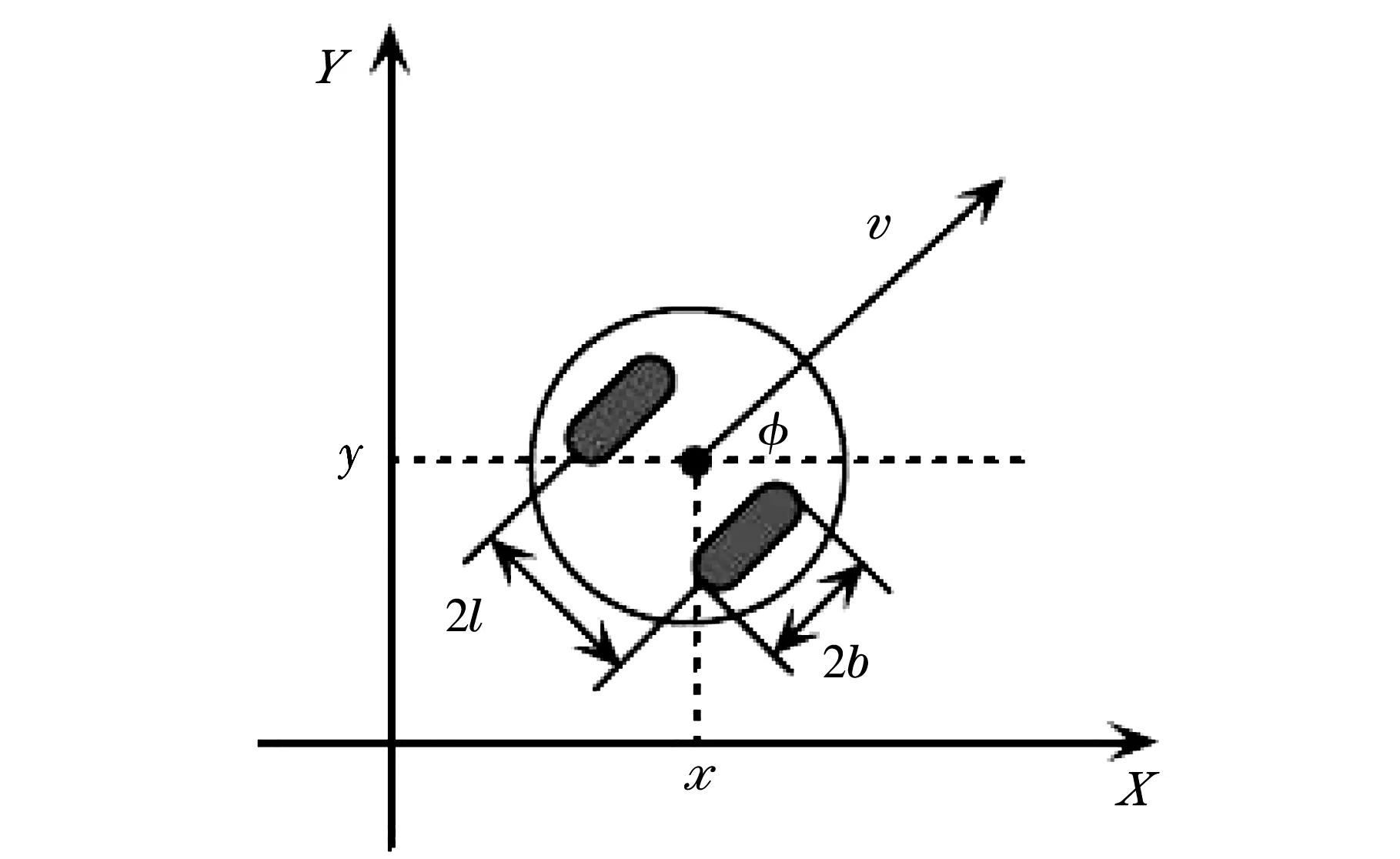
圖1 輪式移動(dòng)機(jī)器人模型
假設(shè)輪式移動(dòng)機(jī)器人運(yùn)動(dòng)過(guò)程中輪子只與地面發(fā)生滾動(dòng),可以對(duì)其運(yùn)動(dòng)的特點(diǎn)建立運(yùn)動(dòng)學(xué)模型為
(1)
其中:x,y為運(yùn)動(dòng)時(shí)質(zhì)心的位置坐標(biāo);φ為輪式移動(dòng)機(jī)器人運(yùn)動(dòng)過(guò)程中軸線與x軸方向的夾角;v輪式移動(dòng)機(jī)器人的瞬時(shí)速度[6].
2 滑模控制器的設(shè)計(jì)
2.1 閉環(huán)系統(tǒng)設(shè)計(jì)
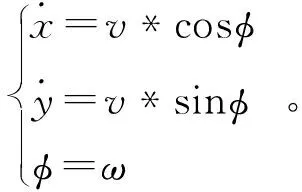
整個(gè)閉環(huán)系統(tǒng)分為外環(huán)系統(tǒng)與內(nèi)環(huán)系統(tǒng),其中位置子系統(tǒng)為外環(huán)系統(tǒng),姿態(tài)系統(tǒng)為內(nèi)環(huán)系統(tǒng),由內(nèi)環(huán)與外環(huán)共同構(gòu)成一個(gè)雙閉環(huán)系統(tǒng).圖2為閉環(huán)系統(tǒng)框圖.其中內(nèi)環(huán)輸入信號(hào)φd與 由外環(huán)與系統(tǒng)輸出提供.
圖2 閉環(huán)系統(tǒng)結(jié)構(gòu)圖
2.2 位置控制律設(shè)計(jì)
首先對(duì)輪式移動(dòng)機(jī)器人運(yùn)動(dòng)時(shí)的位置設(shè)計(jì)控制律,使輪式移動(dòng)機(jī)器人在x,y坐標(biāo)軸方向上的運(yùn)動(dòng)軌跡趨近期望軌跡[6-7].
將期望軌跡定義為[xdyd],則
(2)
其中xe=x-xd,ye=y-yd.
(3)
其中:k1,2>0,η1,2>0.


(4)
在輪式移動(dòng)機(jī)器人運(yùn)動(dòng)時(shí),如果φ跟蹤上φd運(yùn)動(dòng)的軌跡,則輪式移動(dòng)機(jī)器人在姿態(tài)上完成跟蹤,而運(yùn)動(dòng)初始階段誤差的存在會(huì)影響系統(tǒng)穩(wěn)定.
為此,需要將式(4)求得的角度φ當(dāng)成理想值,即取
(5)
并設(shè)計(jì)一個(gè)比位置控制律收斂更快的姿態(tài)控制算法,使φ盡快跟蹤φd.
由u1,u2可知,可以得到輪式移動(dòng)機(jī)器人速度v這個(gè)控制量
(6)
2.3 姿態(tài)控制律設(shè)計(jì)
為實(shí)現(xiàn)角度?能跟蹤上φd,對(duì)姿態(tài)控制律進(jìn)行設(shè)計(jì),設(shè)計(jì)步驟參考位置控制律設(shè)計(jì).設(shè)計(jì)姿態(tài)的指數(shù)趨近控制律為
(7)
其中,k3>0,η3>0.

3 粒子群優(yōu)化輪式移動(dòng)機(jī)器人滑模控制器
由于在滑模控制器設(shè)計(jì)時(shí),趨近律系數(shù)與切換函數(shù)的邊界層厚度會(huì)嚴(yán)重影響輪式移動(dòng)機(jī)器人軌跡跟蹤的效果,而這些參數(shù)在選擇時(shí)存在較大的隨機(jī)性,很難選出合適的參數(shù)實(shí)現(xiàn)高品質(zhì)的跟蹤控制.為了使輪式移動(dòng)機(jī)器人更快更穩(wěn)地消除偏差,可以利用粒子群算法對(duì)趨近律系數(shù)與切換函數(shù)的邊界層厚度進(jìn)行優(yōu)化[8].
粒子群算法是一種通過(guò)大量參數(shù)進(jìn)行多次迭代,優(yōu)化出一個(gè)最優(yōu)結(jié)果的方法,可以對(duì)個(gè)體尋優(yōu),也可也進(jìn)行全局尋優(yōu)[6].通過(guò)種群搜索最優(yōu)參數(shù),在使目標(biāo)函數(shù)J的值最小的前提下實(shí)現(xiàn)輪式移動(dòng)機(jī)器人軌跡跟蹤控制.粒子群算法流程如圖3所示.

圖3 粒子群算法流程圖
通過(guò)前面控制器的設(shè)計(jì),該系統(tǒng)有6個(gè)參數(shù)可以優(yōu)化,分別是位置控制器設(shè)計(jì)時(shí)的k1,k2;姿態(tài)控制器設(shè)計(jì)時(shí)的k3,三個(gè)變量一一對(duì)應(yīng)的邊界層厚度η1,η2,η3等參數(shù)[9].圖4為粒子群算法優(yōu)化滑模參數(shù)系統(tǒng)框圖.

圖4 粒子群算法優(yōu)化滑模參數(shù)系統(tǒng)框圖
通過(guò)建立目標(biāo)函數(shù)J,以實(shí)現(xiàn)跟蹤時(shí)各個(gè)變量的偏差積分和最小為目標(biāo),可建立各變量誤差與時(shí)間軸面積之和為目標(biāo)函數(shù)[9],即:
(8)
在利用粒子群算法尋優(yōu)時(shí),對(duì)6個(gè)參數(shù)設(shè)置的范圍均為0到50,隨機(jī)將這個(gè)范圍分成35個(gè)種群,每個(gè)種群進(jìn)化30次,從中選出一組參數(shù)使目標(biāo)函數(shù)J最小,改組參數(shù)即為這個(gè)范圍內(nèi)最優(yōu)參數(shù).由圖5為粒子群優(yōu)化時(shí)的適應(yīng)度曲線,由圖可知,適應(yīng)度值逐漸降低,在大約16代時(shí)達(dá)到穩(wěn)定狀態(tài).

圖5 適應(yīng)度曲線
通過(guò)粒子群算法的多次迭代,得到最后迭代的適應(yīng)度值大約為0.115,其中k1=42.787 9,k2=46.486 2,k3=48.985 8,η1=42.712 8,η2=39.512 0,η3=25.902 9.
4 實(shí)驗(yàn)仿真及結(jié)果分析
實(shí)驗(yàn)中對(duì)曲線軌跡進(jìn)行跟蹤,驗(yàn)證設(shè)計(jì)的雙閉環(huán)滑模控制器能夠?qū)崿F(xiàn)軌跡跟蹤,同時(shí)進(jìn)行粒子群優(yōu)化得到的參數(shù)與人工經(jīng)驗(yàn)整定參數(shù)進(jìn)行對(duì)比.通過(guò)人工經(jīng)驗(yàn)進(jìn)行調(diào)整得到的參數(shù)為k1=0.3,k2=0.3,k3=3,η1=0.5,η2=0.5,η3=0.5.
以跟蹤曲線軌跡為例,該軌跡可以由以下函數(shù)描述
(9)
對(duì)輪式移動(dòng)機(jī)器人的初始狀態(tài)進(jìn)行定義x0=-5,y0=5,φ0=5.輪式移動(dòng)機(jī)器人在粒子群優(yōu)化參數(shù)與人工經(jīng)驗(yàn)整定參數(shù)下的跟蹤軌跡如圖6所示.

x圖6 期望軌跡與輪式移動(dòng)機(jī)器人運(yùn)動(dòng)軌跡
輪式移動(dòng)機(jī)器人的初始狀態(tài)與目標(biāo)軌跡的初始狀態(tài)不同,導(dǎo)致輪式移動(dòng)機(jī)器人在初始時(shí)刻各狀態(tài)均出現(xiàn)誤差,為了在各狀態(tài)體現(xiàn)出粒子群優(yōu)化得到的參數(shù)在控制效果上相對(duì)人工經(jīng)驗(yàn)整定的更好,下面選取了位置、角度的誤差曲線進(jìn)行對(duì)比,如圖7所示.

時(shí)間/s圖7 曲線軌跡各變量誤差曲線
根據(jù)圖7所的對(duì)比結(jié)果,采用粒子群優(yōu)化得到的滑模控制器參數(shù)可以使輪式移動(dòng)機(jī)器人的跟蹤誤差逐漸減少,即e→0,并保持穩(wěn)定的運(yùn)行效果,相較于人工整定的參數(shù)具有更好的控制效果.同時(shí),利用粒子群優(yōu)化算法進(jìn)行優(yōu)化,大大節(jié)約了人工進(jìn)行調(diào)參所花的時(shí)間,明顯提高了調(diào)整參數(shù)的效率[10].
5 結(jié) 論
為使輪式移動(dòng)機(jī)器人實(shí)現(xiàn)軌跡跟蹤,首先從輪式移動(dòng)機(jī)器人的運(yùn)動(dòng)學(xué)模型著手,根據(jù)輪式移動(dòng)機(jī)器人的3個(gè)狀態(tài),應(yīng)用滑模變結(jié)構(gòu)控制算法,分別在輪式移動(dòng)機(jī)器人位置上的兩個(gè)狀態(tài)與姿態(tài)上的一個(gè)狀態(tài)設(shè)計(jì)控制器,可以使輪式移動(dòng)機(jī)器人各狀態(tài)誤差收斂到0.在實(shí)現(xiàn)軌跡跟蹤后,應(yīng)用粒子群算法優(yōu)化所建立的目標(biāo)函數(shù)J,得到目標(biāo)函數(shù)最小時(shí)的最優(yōu)參數(shù).從仿真結(jié)果對(duì)比中明顯看出,通過(guò)利用粒子群優(yōu)化算法得到的參數(shù)在成功實(shí)現(xiàn)輪式移動(dòng)機(jī)器人對(duì)曲線的跟蹤的基礎(chǔ)上,控制效果明顯比人工整定參數(shù)的控制效果更優(yōu),大大提高了雙閉環(huán)滑模控制器的控制效果.這也體現(xiàn)出了將粒子群優(yōu)化算法應(yīng)用到所設(shè)計(jì)的滑模控制器后,大大提高滑模控制器控制效率.
猜你喜歡
北京航空航天大學(xué)學(xué)報(bào)(2022年6期)2022-07-02 01:59:12
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
制造技術(shù)與機(jī)床(2017年3期)2017-06-23 08:11:21
Coco薇(2017年5期)2017-06-05 08:53:16
中國(guó)海洋大學(xué)學(xué)報(bào)(自然科學(xué)版)(2014年8期)2014-02-28 12:21:31