基于CFD的單體復合船水動力性能分析
2021-02-25 09:02:58黃松興焦甲龍孫樹政陳超核
哈爾濱工程大學學報 2021年1期
黃松興, 焦甲龍, 孫樹政, 陳超核
(1.華南理工大學 土木與交通學院,廣東 廣州 510641; 2.哈爾濱工程大學 船舶工程學院,黑龍江 哈爾濱 150001)
船舶在海浪中航行會產生六自由度的搖蕩運動,進而對船上人員生活和設備工作造成影響[1]。船舶大幅運動還會引起劇烈的砰擊上浪等現象,進而對船體結構強度造成威脅。為提高艦船在高海況下的耐波性,各種類型的復合船型,例如水翼船、穿浪雙體船和三體船[2-4]等被研發采用,但這些船型的建造工藝復雜、維護成本較高,難以滿足廣泛的實際應用。常規圓舭型單體船被廣泛采用,它具有船體型線光順便于設計加工等優點。然而,隨著遠海大型艦船的需求不斷增加,研發能夠在高海況下平穩作業的新船型是十分必要的。深V船型是一種高性能單體船,其耐波性較圓舭船型有明顯改善,但其快速性一般較圓舭船型稍差。為進一步提高深V船型的耐波性能,可在其艏部加裝經過優化的半潛體[5]。當船舶在波浪中產生垂向運動時,半潛體會產生與船舶垂向運動方向相反的阻尼力,當其以攻角在波浪中前進時還會產生動升力,從而產生與船舶垂向運動相反的粘性力達到減搖的目的。總之,半潛艏減搖的原理是由于流體粘性力的作用[1],然而常規勢流理論無法考慮流體粘性效應,不能合理預報加裝減搖附體船型的水動力性能。
近年來,隨著計算機科學與技術的不斷發展,基于CFD技術的船舶水動力預報方法得以迅速發展。Yeung等[6]采用二維RANS方法求解帶舭龍骨柱體剖面的附加質量和阻尼系數。Sherbaz等[7]采用粘性理論進行KCS船型縱傾優化計算。Hosseini等[8]將CFD技術應用于強非線性波浪和船體運動的仿真。Phan等[9]采用RANS方法計算多種二維剖面的橫搖阻尼。孫鵬[10]采用湍流模型計算深V型剖面、半潛艏剖面等多種船型的水動力性能。蔣銀等[11]利用CFD軟件對三維帶舭龍骨船體進行自由橫搖衰減運動以及強迫橫搖運動的數值模擬研究。Guo等[12]采用RANS方程對KVLCC2在迎浪中的附加阻力和船舶運動進行了預測。本文基于CFD方法對單體復合船型的橫搖自由衰減特性、靜水阻力以及規則波中的耐波性能的進行模擬計算,并與圓舭船型進行對比,分析研究加裝減搖附體半潛體對船舶阻力和耐波性能的影響。
1 數值模型
1.1 CFD數值方法
本文基于CFD技術研究船舶在靜水及波浪中航行的水動力性能。在笛卡爾坐標系下,對于三維連續、非定常、不可壓縮流體的連續方程和動量方程分別為:
(1)
(2)
式中:ρ為流體密度;μ為流體動力粘性系數;xi為坐標系分量;Ui為流體平均速度分量;u′為速度波動;P為平均壓力。
雷諾平均應力張量計算公式為:
(3)
在數值湍流流動計算中,采用Realizablek-ε湍流模型得到Boussinesq的湍流渦粘度和速度之間的關系。湍動能k和湍流能量耗散率ε通過Realizablek-ε湍流模型[13],由以下2個輸運方程給出:
(4)

(5)
式中:模型的臨界系數C1和C2表示平均流和湍流屬性的函數。對應的k和ε的湍流普朗克常數分別取σk=1.0,σε=1.2。采用基于SIMPLE算法[14]的分離式求解器求解壓力-速度耦合方程,非定常項采用具有二階精度的歐拉隱式離散格式。自由面的捕捉采用VOF方法,并考慮重力作用。
船體運動控制方程[15]可表示為:
(6)
式中:m為船體質量;v為質心運動速度;f為作用在船體上的合力;I為隨體坐標系中繞船體重心的各軸轉動慣量;ω為隨體坐標系中的船體角速度;N為作用在船體上的合力矩。
1.2 數值模型建立
本研究選取某傳統圓舭船型為參考船型,在改進的深V船型基礎上加裝半潛艏減搖附體,從而進一步提高深V船型的耐波性能。為提高計算效率并與試驗結果進行直接比較,采用1∶50縮尺模型進行數值建模與計算。采用STAR-CCM+建立的2種船模如圖1所示,模型主尺度參數見表1。深V船型艏部加裝的減搖附體的示意圖見圖2,半潛艏的主要參數見表2。

圖1 船型外殼建模
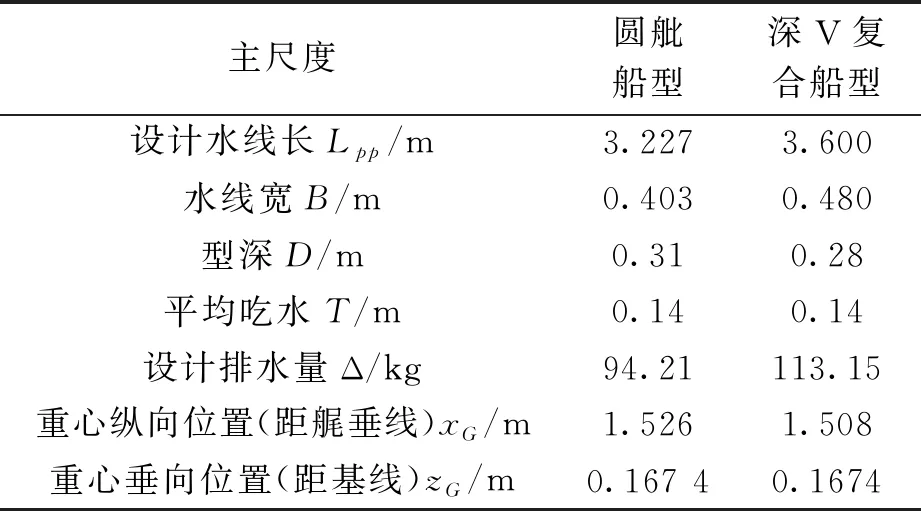
表1 船模主要參數
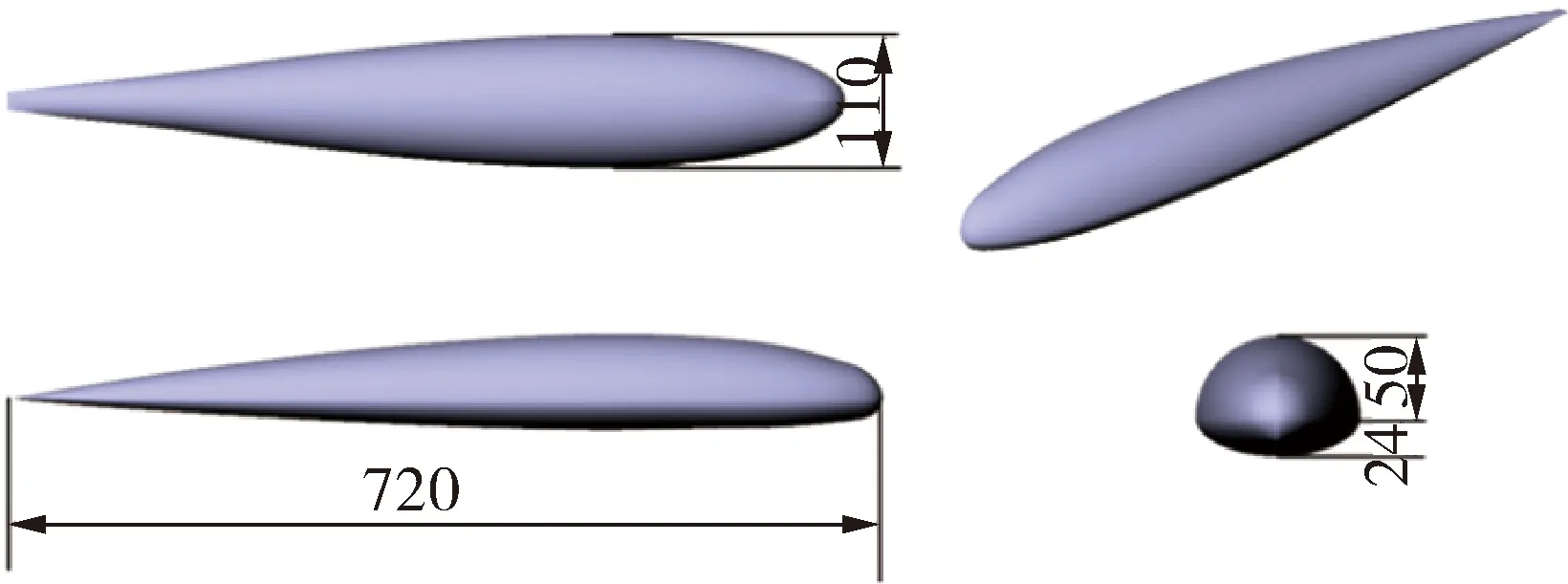
圖2 半潛體示意(mm)
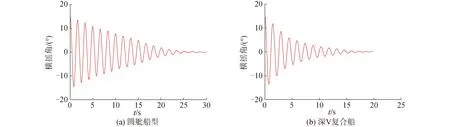
在流體域建模過程中考慮船體的對稱性,只選取中縱剖面左側部分建模從而提高計算效率。計算流體域尺寸為:-2.0Lpp 圖3 流場計算域劃分 采用六面體非結構化網格對計算域進行劃分,為精確捕捉自由液面和船體周圍的湍流等物理量的劇烈變化,在自由液面以及船體周圍進行局部加密。自由面處網格尺寸需要根據入射波波高及波長確定,為此通過空場造波法預先試算,使所設置的網格可以避免波浪的顯著衰減。為了避免壁面處發生波浪反射,在邊界處對生成的VOF波附加阻尼進行消波。深V船型數值模型網格劃分如圖4所示,計算域的網格總數為287萬。船模表面網格的劃分情況如圖5所示,船體外殼壁面設置6層邊界層網格(y+值取30~60)。計算初始時刻船模處于靜水正浮狀態。自由度運動模擬采用DFBI (dynamic fluid body interaction)求解完成,計算過程中只釋放垂蕩和縱搖2個方向的自由度。 圖4 整體網格劃分 圖5 船模表面網格 根據數值計算及優化所得到的船型方案,采用玻璃鋼分別制作圓舭船型和深V復合船型的1∶50縮尺模型。試驗在哈爾濱工程大學船模拖曳水池中進行,該水池長寬深分別為108、7、3.5 m。拖車最大航速為6.5 m/s,精度為0.001 m/s。水池裝備的搖板式造波機可生成規則波和長峰不規則波,規則波最大波高0.4 m、波浪周期0.4~4.0 s。采用四自由度適航儀測量模型的阻力及運動信號,深V模型及其在適航儀上的安裝如圖6所示。試驗模型的重量分布和重心位置等參數與數值計算模型保持一致。 圖6 深V模型及試驗裝置 深V復合船型的舭部折角線區域會大幅增加船體橫搖阻尼,使得深V船型的橫搖穩定性明顯優于圓舭船型。基于CFD方法模擬得到的2種船型在初始橫傾角15°時的靜水橫搖自由衰減時歷曲線如圖7所示。由此可得基于CFD計算的圓舭船型的無因次衰減系數為2μ=0.035,此外基于船模試驗所得無因次衰減系數為0.034,誤差為2.94%。基于CFD數值計算的深V船型的無因次衰減系數為0.090,為圓舭船型的2.6倍。基于CFD模擬所得圓舭船型和深V船型的橫搖周期分別為1. 667 s和1.421 s,這說明了加裝減搖附體深V船型的橫搖穩定性明顯優于圓舭船型。 圖7 CFD計算船模橫搖自由衰減時歷曲線 分別基于CFD數值計算和水池模型試驗研究兩船型在不同航速下的阻力特性,所得到的船模在定常段航行時的靜水阻力、沉深值和縱傾角隨航速變化的對比如圖8所示。沉深值取上浮為正,縱傾角取尾傾為正。 圖8 不同航速下的兩船型阻力特性對比 根據靜水阻力試驗結果,在中低速段深V船型的單位排水量阻力和圓舭船型的阻力相當。隨著航速的提高(Fn>0.349時),深V船型的阻力明顯低于圓舭船型,例如在Fn=0.504(實船速度39 kn)時,深V船型的單位排水量阻力值比圓舭船型小14.12%。此外,基于STAR-CCM+的計算結果在Fn<0.388(實船速度30 kn)時與試驗結果誤差小于8%,但隨著航速增大計算誤差增加。總之,數值模擬所得兩船型阻力結果趨勢與模型試驗結果吻合較好,可用于初步設計階段的船型優選。 根據沉深和縱傾曲線結果,當Fn<0.15時,深V船型的重心沉深量比圓舭船型的略大。隨著航速提高,由于半潛體的動升力作用,深V船型的重心升沉量減小。當Fn<0.4時,深V船型和圓舭船型的縱傾角都很小可忽略不計;當Fn>0.4時,兩船型發生明顯的艉傾現象且深V船型的縱傾量略小于圓舭船型。CFD計算結果和試驗結果吻合較好。 圖9為2種船型在實船航速18 kn、24 kn和30 kn的自由面波形對比圖,圖中上半部分和下半部分分別為圓舭船型和復合船型模擬結果。由此可見,在18 kn航速下,2種船型周圍的興波高度較小,深V船型的興波場有較大的肩波,船艏艉的壓差阻力比圓舭船型大。隨著航速的增加,2種船型的興波阻力迅速增大,深V復合船型艉部的雞尾流更明顯,增大了水線面的虛長度,這有利于提高深V船型快速性。 圖9 圓舭船型和深V復合船型的靜水航行自由面興波 在圓舭船型和深V復合船型進行迎浪規則波中的CFD數值計算及水池模型試驗中,波高取50 mm,波長船長比取0.8~2.2,實船航速取18、24、30 kn(對應模型航速1.309、1.746、2.182 m/s)。圖10和11分別為水池模型試驗所得兩船型在不同航速下迎浪航行時的縱搖和升沉幅值無因次化結果。其中θ為縱搖角,k為波數,ζ為波幅,Z為升沉量。整體而言,深V復合船型的縱搖響應明顯小于圓舭船型,升沉響應略小于圓舭船型。這表明加裝半潛體后的深V復合船型具有較好的耐波性能,特別是當1.0≤λ/L≤1.4時,其具有明顯的縱搖穩定性。從3個航速下的試驗波長范圍看出,在24 kn航速下λ/L=1.1時升沉的減搖效果高達9.98%,在24 kn航速下λ/L=1.2時縱搖的減搖效果高達12.46%。 圖10 縱搖響應RAO 圖11 升沉響應RAO 此外,模型試驗所測量的各工況下兩種船型的波浪增阻如圖12所示。可以看出,深V復合船型的波浪增阻峰值普遍比圓舭船型大。而在24 kn航速下1.0≤λ/L≤1.2時,深V復合船型的波浪增阻稍比圓舭船型小。 為簡化起見,本文選取2種船型在實船航速18 kn、波長船長比為1.1時迎浪航行的運動響應的CFD數值計算與水池模型試驗結果進行對比。2種船型的縱搖和重心升沉時歷曲線對比如圖13和14所示。可以看出,計算結果與試驗結果的吻合程度較好,計算誤差在10%以內,證明了采用STAR-CCM+計算船舶在波浪中的運動響應的準確性。 圖15所示為基于CFD模擬和試驗測試的圓舭船型艏艉局部波形對比圖。可以看出,CFD模擬的圓舭船型產生的肩波、雞尾流均與試驗波形相對應。總之,水池模型試驗和CFD計算的波形具有較好的相似度。圖16所示為2種船型在實船航速18 kn、波長船長比為1.1迎浪航行時的自由面波形對比。當船舶穿過波浪時,深V復合船型后方的興波較高,波浪增阻普遍較大。 圖12 波浪增阻RAO 圖13 圓舭船型運動時歷曲線 (Fn=0.233) 圖14 深V船型運動時歷曲線 (Fn=0.233) 圖15 CFD模擬和模型試驗所得的船艏艉處局部波形對比 圖16 2種船型在波浪中的波形圖(Fn=0.233) 1)深V船型的橫搖穩定性明顯優于圓舭船型,加裝半潛艏的深V復合船型縱向穩定性也明顯優于圓舭船型; 2)基于Realizablek-ε湍流模型和VOF造波的重疊網格CFD模擬方法,所計算的船舶靜水阻力和規則波中的運動性能與試驗結果吻合良好,驗證了該CFD數值模型預報加裝減搖附體深V船型水動力性能的有效性和準確性; 3)本文優化設計的深V復合船型的靜水阻力比母船型圓舭船型小,但波浪增阻峰值普遍比圓舭船型大,在24 kn航速1.0≤λ/L≤1.2時,深V復合船型的波浪增阻稍比圓舭船型小,其耐波性能尤其是縱搖穩定性得到明顯改善,其垂蕩和縱搖最大分別減小9.98%和12.46%,明顯提高了船舶的綜合航行性能。


2 水池模型試驗建立

3 結果對比分析
3.1 橫搖衰減特性分析
3.2 靜水阻力分析


3.3 規則波中運動響應分析







4 結論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中國船檢(2017年3期)2017-05-18 11:33:09
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
