增程式電動車自適應工況辨識策略研究
2021-02-26 03:19:54顧琰浩吳曉東許敏
車用發動機 2021年1期
顧琰浩,吳曉東,許敏
(上海交通大學機械與動力工程學院,上海 200240)
當前,國家標準中汽車節能指標和測試工況日益嚴格,在發動機效率和動力電池容量難以突破的前提下,混合動力汽車成為短期滿足節能指標的有效方案[1]。增程式電動汽車(EREV)在純電動車基礎上增加增程系統,可以有效提高續駛里程,并改善發動機工作條件和效率。
國內外學者已經對增程式電動車能量管理策略進行了研究。基于PMP算法的全局優化策略,憑借其計算速度快、計算量較動態規劃(Dynamic Programming,DP)算法小的優點成為近年全局優化理論的研究熱點[2-3]。S. Onori[4]使用打靶法得到協態變量的初值。Kim[5]研究表明,PMP算法結果與DP算法非常接近,因為可以合理地假設混合動力汽車的SOC變化很小,所以PMP全局優化控制策略的最優協態變量λ*被認為是一個常數。PMP全局優化控制策略以較小的計算量獲得接近最優的優化效果,在離線優化中得到廣泛應用。但是,PMP全局優化控制策略需要預知全局工況數據,無法用于車輛在線實時計算。
為了能夠將PMP策略用于實時在線計算,提出自適應PMP控制策略,該策略通過實時提取車輛行駛數據,計算特征參數辨識當前工況,根據工況辨識結果調整自適應PMP控制策略的協態變量λ(t)。如何選擇合適的工況特征參數進行工況辨識,對自適應PMP控制策略的優化結果具有重要影響,逐漸被研究者所重視。Kuhler[6]提出10個特征參數用于辨識工況,包括平均速度、平均加速度等。Song[7]根據經驗選擇特征參數。Montazeri-Gh等[8]利用相關性分析方法來挑選與油耗水平相關的特征參數。謝海明[9]選擇最優百公里燃油消耗量v*作為相關性參數,通過分析特征參數與工況百公里燃油消耗量v*之間的相關性,選擇合適的特征參數。將與工況最優百公里燃油消耗量v*相關性最高的特征參數作為工況辨識特征參數的自適應PMP控制策略(自適應PMP(v)策略)被廣泛應用。
對于兩種完全不同的工況,如果在PMP全局控制策略下具有不同的最優協態變量λ*和相同的最優百公里燃油消耗量v*,自適應PMP(v)策略會將兩種工況視為等效,采用同樣的協態變量進行控制,顯然得不到理想效果。
針對自適應PMP(v)策略存在的問題,本研究提出將與工況在PMP全局優化控制策略下的最優協態變量λ*相關性最高的特征參數作為工況辨識特征參數的自適應PMP控制策略(自適應PMP(λ)策略),提高工況辨識結果與PMP控制策略匹配性。以現有的增程式電動車工況辨識策略為基礎,通過建立多微行程的優化數據庫,在傳統聚類方法基礎上提高辨識精度。基于車輛實時運行的坐標向量,對PMP優化算法的協變量進行在線自適應調整,實現對不同駕駛工況的動態優化,提高增程式電動汽車在未知工況下的燃油經濟性。
1 車輛參數與建模
增程式電動汽車的基本結構與能量流動方向[10]見圖1。增程式電動汽車在結構上屬于串聯式混合動力汽車,只由驅動電機通過傳動裝置驅動車輪,發動機和ISG電機組成的APU不直接和驅動輪連接,只作發電使用。
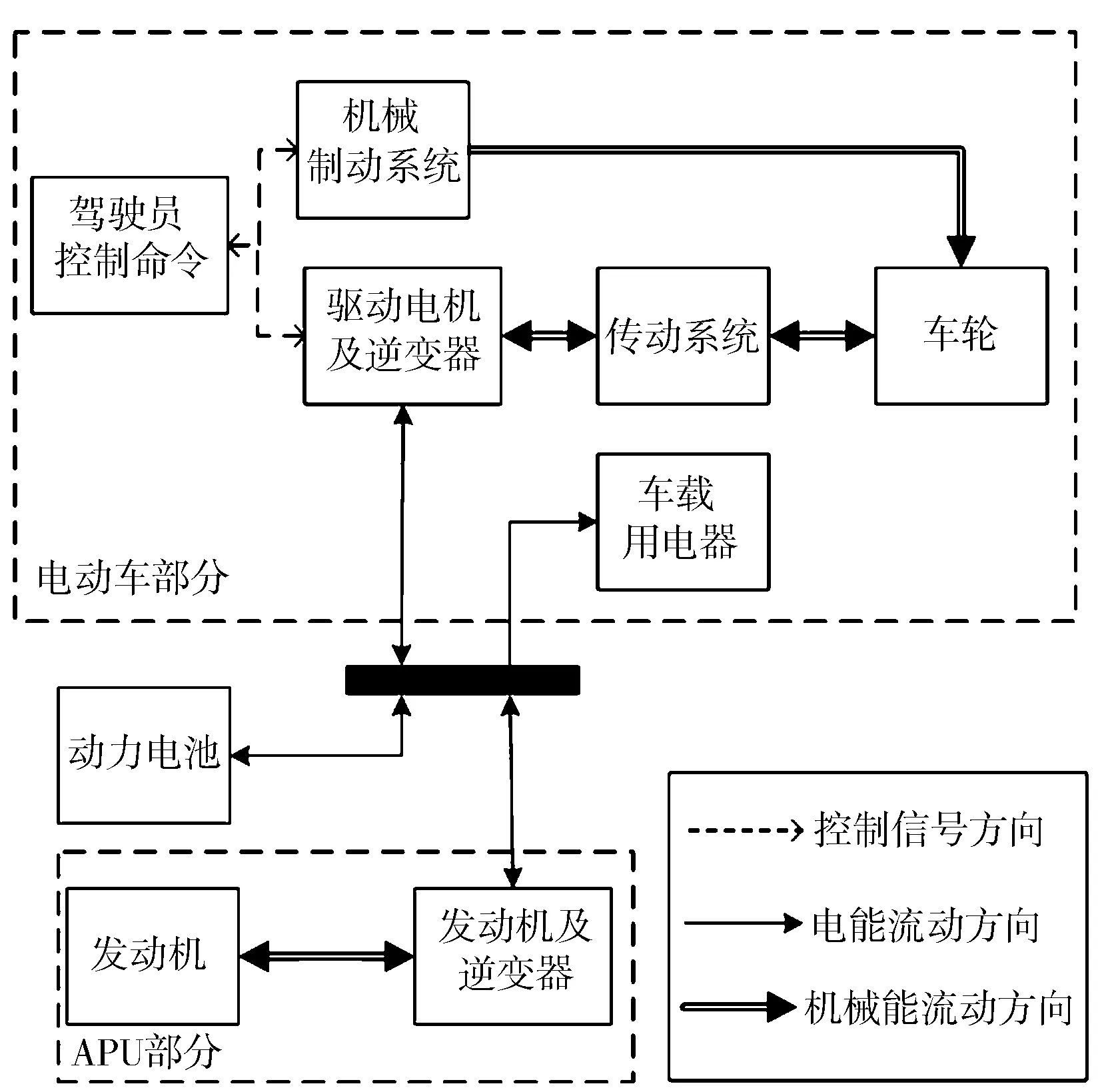
圖1 增程式電動汽車基本結構和能量流
1.1 整車動力學模型
為了評價EREV的能量管理策略,建立了基于Matlab/Simulink平臺的前向非線性車輛模型(見圖2)。該模型擁有駕駛員模塊,同時驅動電機具有制動能量回收功能,其他模塊包括傳動系統、制動器、動力學模型、APU模型、儲能電池模型。
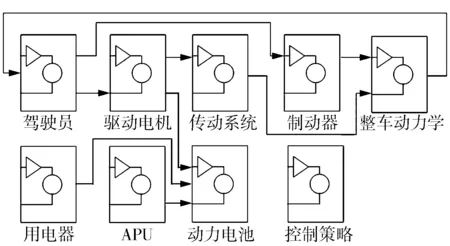
圖2 Simulink平臺下前向非線性車輛模型
式(1)為車輛行駛方程,驅動電機輸出力矩需要克服道路荷載,這些荷載包括滾動阻力、空氣動力阻力、坡道阻力和加速阻力。
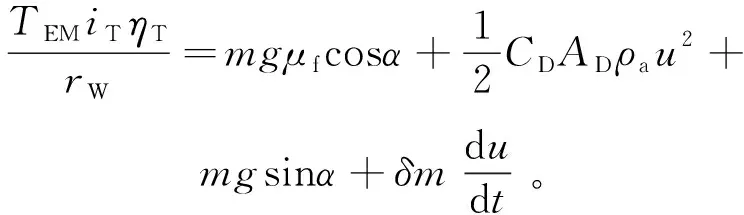
(1)
式中:TEM為驅動電機輸出力矩;iT為傳動系統減速比;ηT為傳動系統效率;rW為車輪半徑;m為車輛基準質量;g為重力加速度,9.8 m/s2;μf為滾動阻力系數;α為坡度角;CD為風阻系數;AD為迎風面積;ρa為空氣密度,1.293 kg/m3;u為車速;δ為車輛當量慣量系數。
1.2 APU模型
(2)

圖3 APU燃油消耗率圖及最高效率曲線

1.3 儲能電池模型
增程式電動車的能量存儲電池使用Rint模型進行設計[11](見圖4)。這里忽略了溫度和健康程度(SOH)對電池參數的影響。儲能電池電流和荷電狀態見式(3)和式(4)。
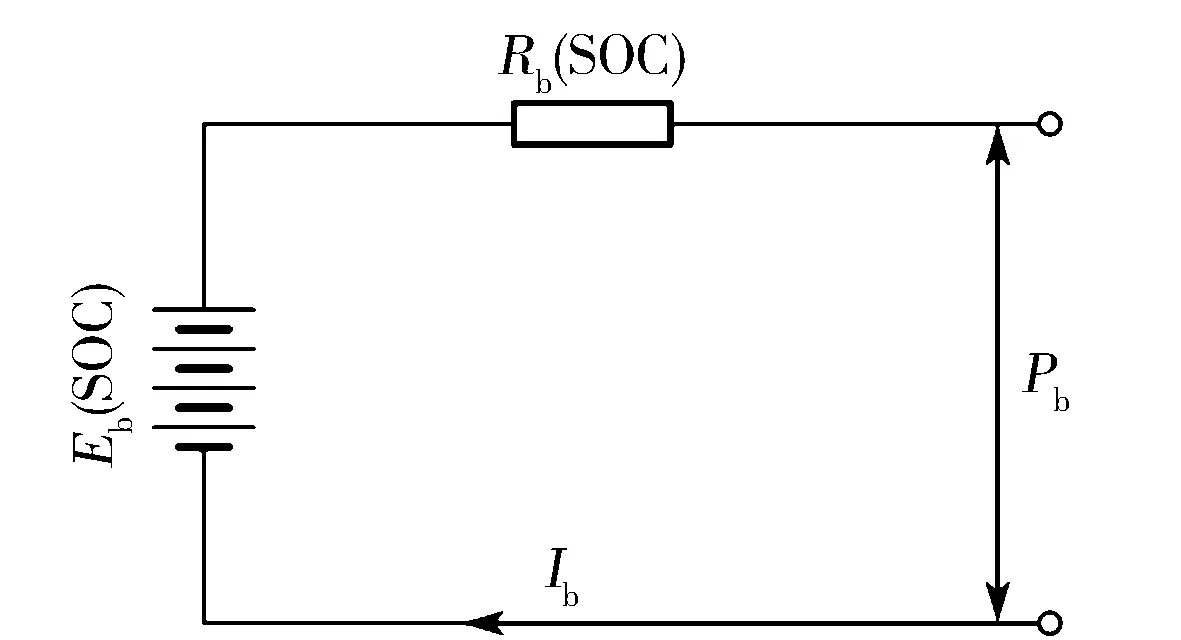
圖4 電池Rint模型

(3)
式中:Ib為動力電池輸出電流;Eb為動力電池電動勢;Rb為動力電池內阻;Pb為動力電池輸出功率。
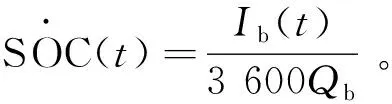
(4)
式中:SOC為動力電池荷電狀態(State of Charge);Qb為動力電池電容量。
2 微行程樣本與PMP控制策略
自適應控制中的樣本需要有典型性、差異性和全面性。典型性是指單個樣本要能突出地反映一類行駛狀況;差異性是指樣本個體之間要有明顯區分;全面性是指樣本整體需要覆蓋盡可能多的現實可能。在工況循環、微行程和時間窗口這三種樣本建立方案中,選擇微行程作為樣本創建方式,因為微行程具有完整的起停過程,微行程之間具有明顯的典型性、差異性[12]。
2.1 微行程樣本的建立
NEDC是歐洲、中國、澳大利亞等國家和地區現行使用的工作循環,由市區運轉循環和市郊運轉循環組成。WLTP為聯合國推行的輕型汽車測試程序,在全世界范圍內收集真實的行駛工況數據,包含低速、中速、高速和超高速4種工況區間。US06是美國高速度、高加速度工作循環。選擇NEDC、WLTP、US06這3種工作循環作為樣本數據,可以覆蓋車輛運行的常見速度區間和加速度區間。
NEDC、WLTP、US06工作循環總計有16種微行程(見圖5至圖7),設微行程為M1,…M16。
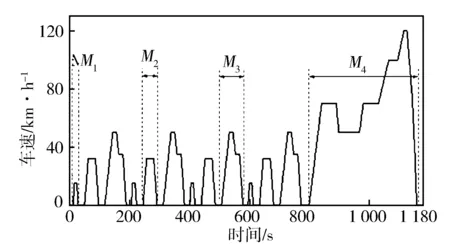
圖5 NEDC工作循環和微行程
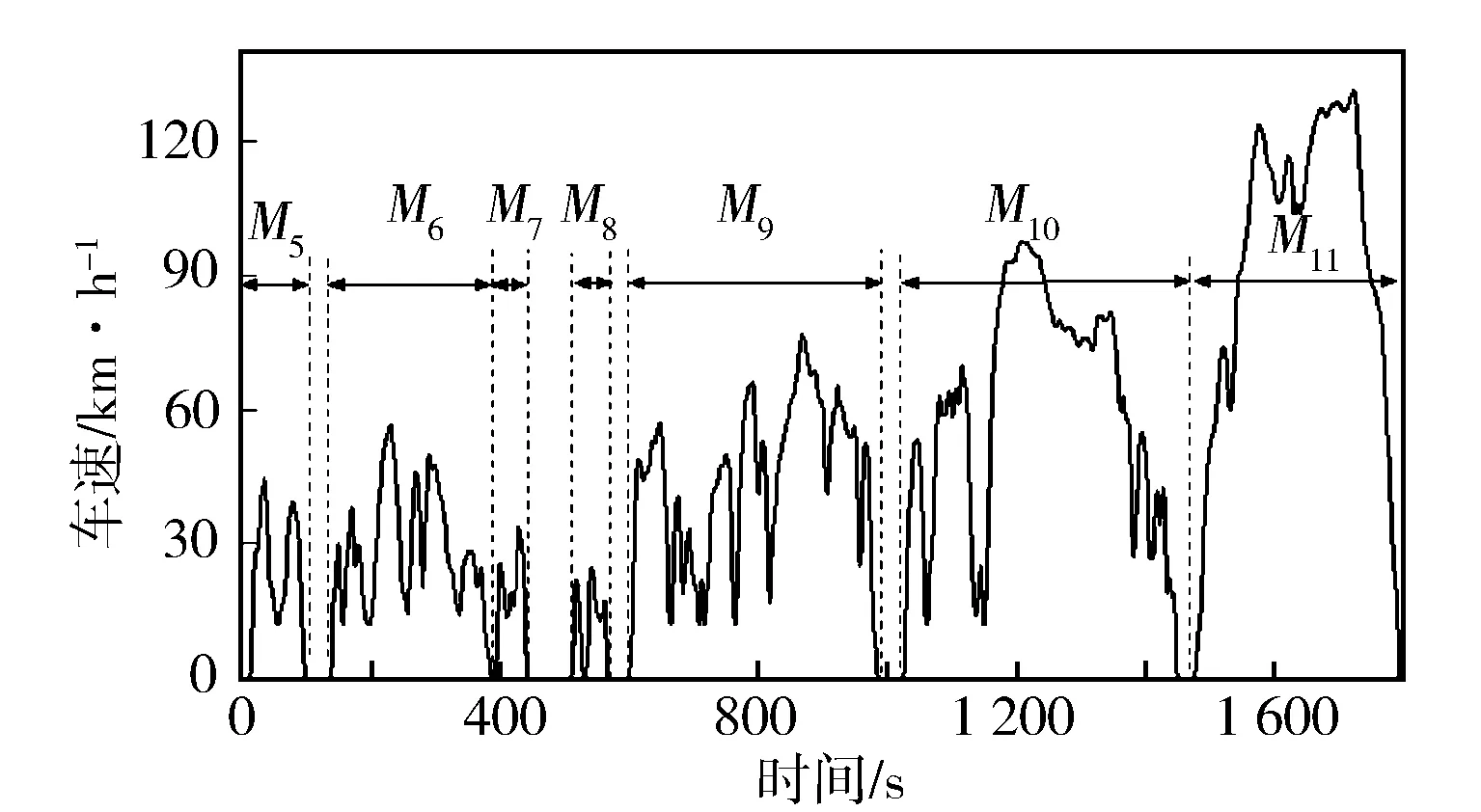
圖6 WLTP工作循環和微行程
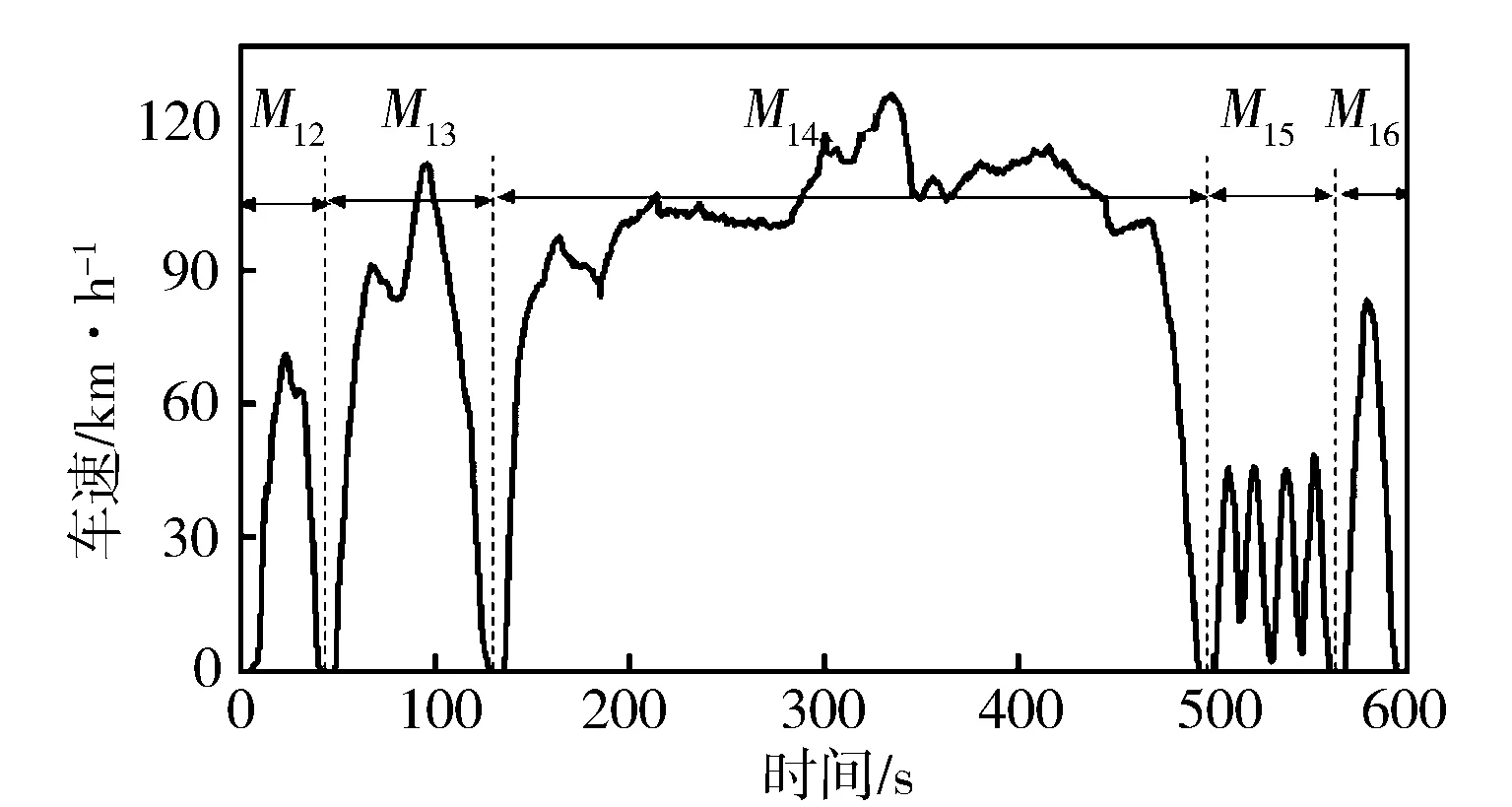
圖7 US06工作循環和微行程
對于每種微行程Mi,通過以下方式獲得對應的樣本Yi:
1) 如果微行程Mi的時間長度不小于150 s,則微行程Mi直接作為樣本Yi;
2) 如果微行程Mi的時間長度小于150 s,則重復微行程Mi,直到總時間長度不小于150 s,作為一個樣本Yi。
通過以上方式,可以得到樣本Y1,…Y16,樣本時長Ti≥150 s。
2.2 PMP全局優化控制參數
蘇聯學者龐特里亞金在1957—1958年創立極小值原理。PMP控制策略目標參數:
(5)

(6)

系統狀態方程:

(7)
根據式(5)和式(7),建立哈密爾頓函數:

(8)
式中:λ(t)為協態變量。
當SOC在小范圍內變化時,SOC(t)近似為常數[13]:

(9)
所以PMP全局優化控制策略所采用的最優協態變量λ*(t)可視為常數,且等于最優協態變量的初始值λ*(0),即有:
λ*(0)=λ*(t)=λ*。
(10)
(11)
s.t. SOC(t0)=SOC0,
SOC(tf)=SOCf。
根據式(11),對16個樣本分別使用PMP全局優化算法進行仿真,設定SOC0=0.3,SOCf=0.3,分別得到16個樣本的最優協態變量λi*和最優百公里燃油消耗量vi。最優協變量組成向量λ*=[λ1*,λ2*,…λ16*]T,最優百公里燃油消耗量組成向量v*=[v1*,v2*,…v16*]T。
3 特征參數離線分析
為分析車輛行駛狀態和樣本的接近度,將樣本和實際行駛的“車速-時間”關系轉化為n維空間內的樣本坐標向量φ和行駛坐標向量x。為保證自適應控制的精確性,降低車輛實時計算壓力,樣本坐標和行駛坐標應該在保留工況信息的同時具有較少的維度。
本研究選擇最優協變量λ*作為相關性參數,通過相關性分析選擇合適的工況特征參數進行工況辨識,并和以最優百公里燃油消耗量v*作為相關性參數的方案進行比較。
在后面的公式中,使用r代表相關性參數,兩種方案中r分別是最優協變量λ*或最優百公里燃油消耗量v*。
3.1 樣本特征參數提取
初步選擇k個樣本特征參數,本研究中k=21,特征參數列于表1,所有特征參數要求與樣本時長無關。
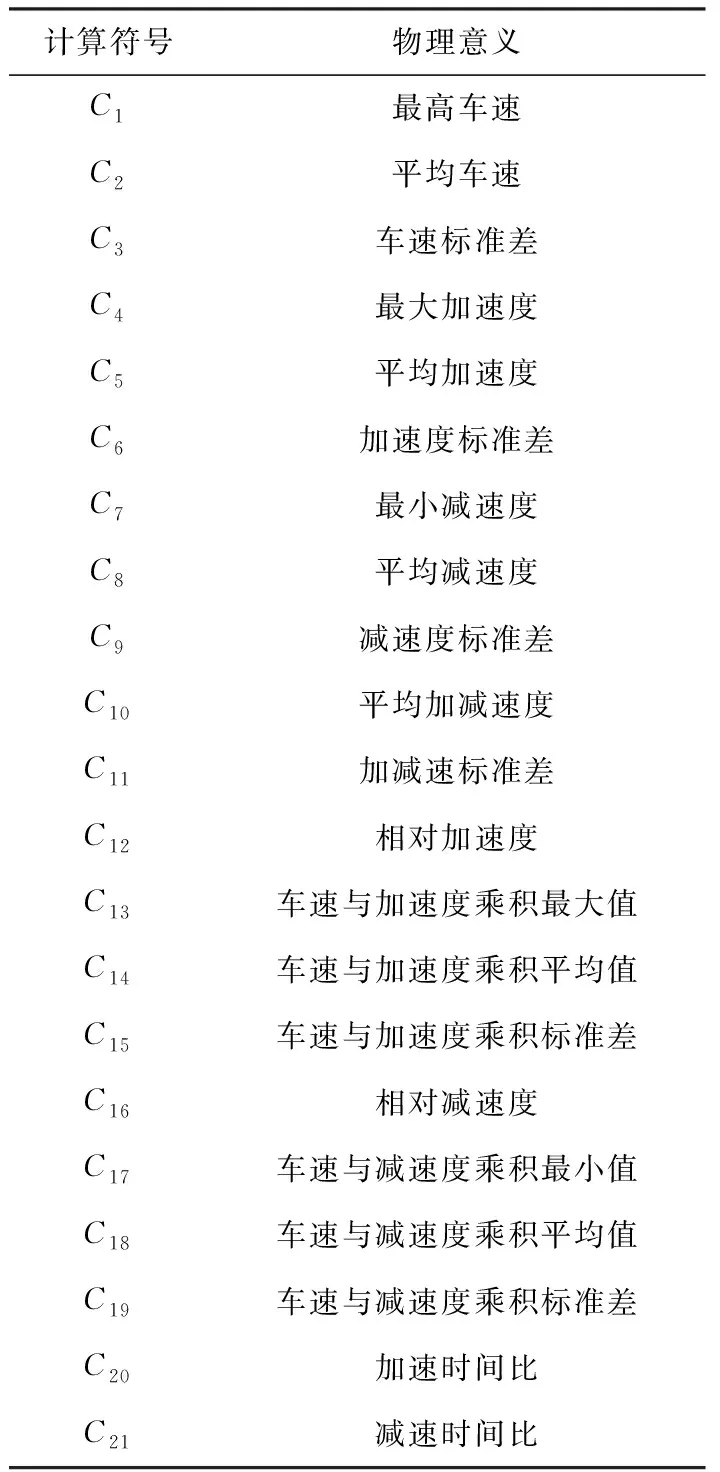
表1 21個特征參數和意義
計算16個樣本在t∈[0,Ti]區間內的k個特征參數值,得到樣本參數矩陣A:
(12)
式中:aij為樣本Yi的特征參數Cj的值,i=1,…16;j=1,…k。
對樣本參數矩陣A進行零均值標準化:
(13)
(14)
uj為特征參數Cj的樣本平均值:
(15)
σj為特征參數Cj的樣本標準差:
(16)
特征參數Cj的參數向量:
bj=[b1j,b2j,…b16j]T,j=1,…k。
3.2 特征參數相關性分析
特征參數Cj與相關性參數r的相關性,即參數向量bj與相關性參數向量r的相關性為

(17)
得到的特征參數Cj與相關性參數r相關性見圖8。由圖8可以看到,以最優協變量λ*和最優百公里燃油消耗量v*為相關性參數,分析特征參數的結果具有明顯差異。對于特征參數C4,與最優協變量λ*體現正相關特性,與最優百公里燃油消耗量v*則體現負相關特性。對于特征參數C9,與最優協變量λ*體現正相關特性,與最優百公里燃油消耗量v*則相關度接近于0。
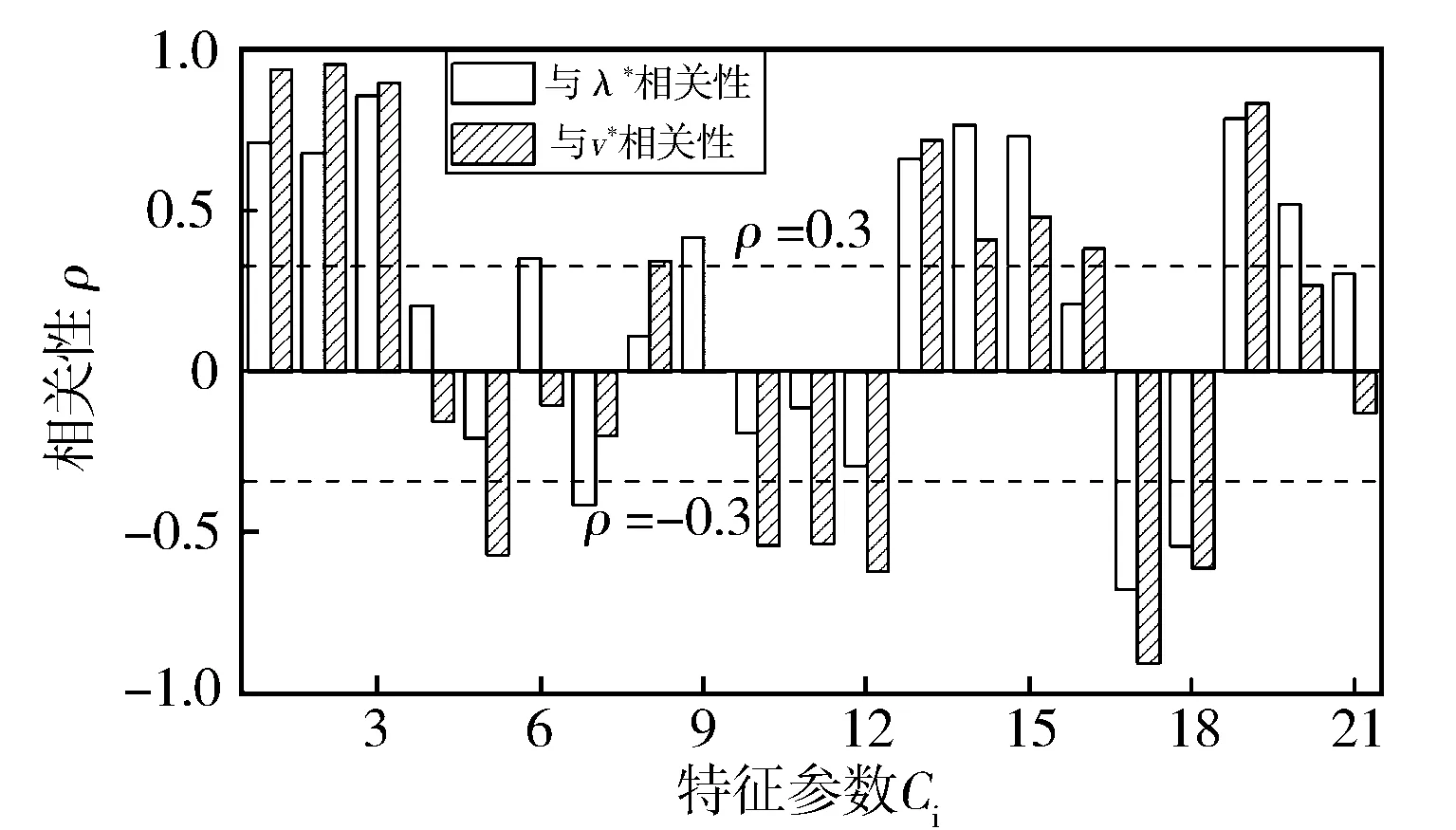
圖8 特征參數與相關性參數的相關性
對特征參數Ci,Cj進行相關性分析:
(18)
在選擇的k個初步特征參數中,按照以下規則選擇有效特征參數集Ω(r)。
1) 有效特征參數集Ω(r)中所有元素滿足|ρj|>0.3,即Ω(r)所有特征參數Cj與相關性參數r的相關性大于0.3。
2) 有效特征參數集Ω(r)中任意兩個元素滿足|θij|<0.85,即當Ci和Cj相關性絕對值|θij|>0.85時,表示Ci和Cj在物理上有本質聯系,只保留一種特征參數。
最終得到的有效特征參數集如下:
Ω(λ)={C3,C7,C9,C14,C15,C18,C20,C21},
Ω(v)={C2,C12,C13,C15,C16,C18}。
將Ω(r)中的特征參數重新編號,組成有效特征參數矩陣W(r):
W(r)=[w1, …wq]=[bl1, …blq]。
(19)
式中:q為有效特征參數矩陣W(r)中特征參數的數量。對于W(λ),q=8。對于W(v),q=6。wj=blj。
3.3 主成分分析
Ω(r)內特征參數之間仍然有一定的相關關系,說明這些特征參數反映的信息有一定的重疊。主成分分析是對原先提出的所有變量刪去多余,建立盡可能少的新變量,使這些新變量兩兩不相關,而且這些新變量盡可能保持原有的信息。
對矩陣W(r)進行主成分分析,通常要求保留的主成分能夠反映原來指標的85%以上。如圖9、圖10所示,對于W(λ)和W(v),前4個主成分方差貢獻率占比分別為94.48%和98.58%,且相互獨立。經過主成分分析,特征向量維度從8或者6降為4,使得車載VCU的計算量降低近50%,同時與工況信息參數r相關的信息得到保留。

圖9 自適應PMP(λ)策略主成分與方差貢獻率
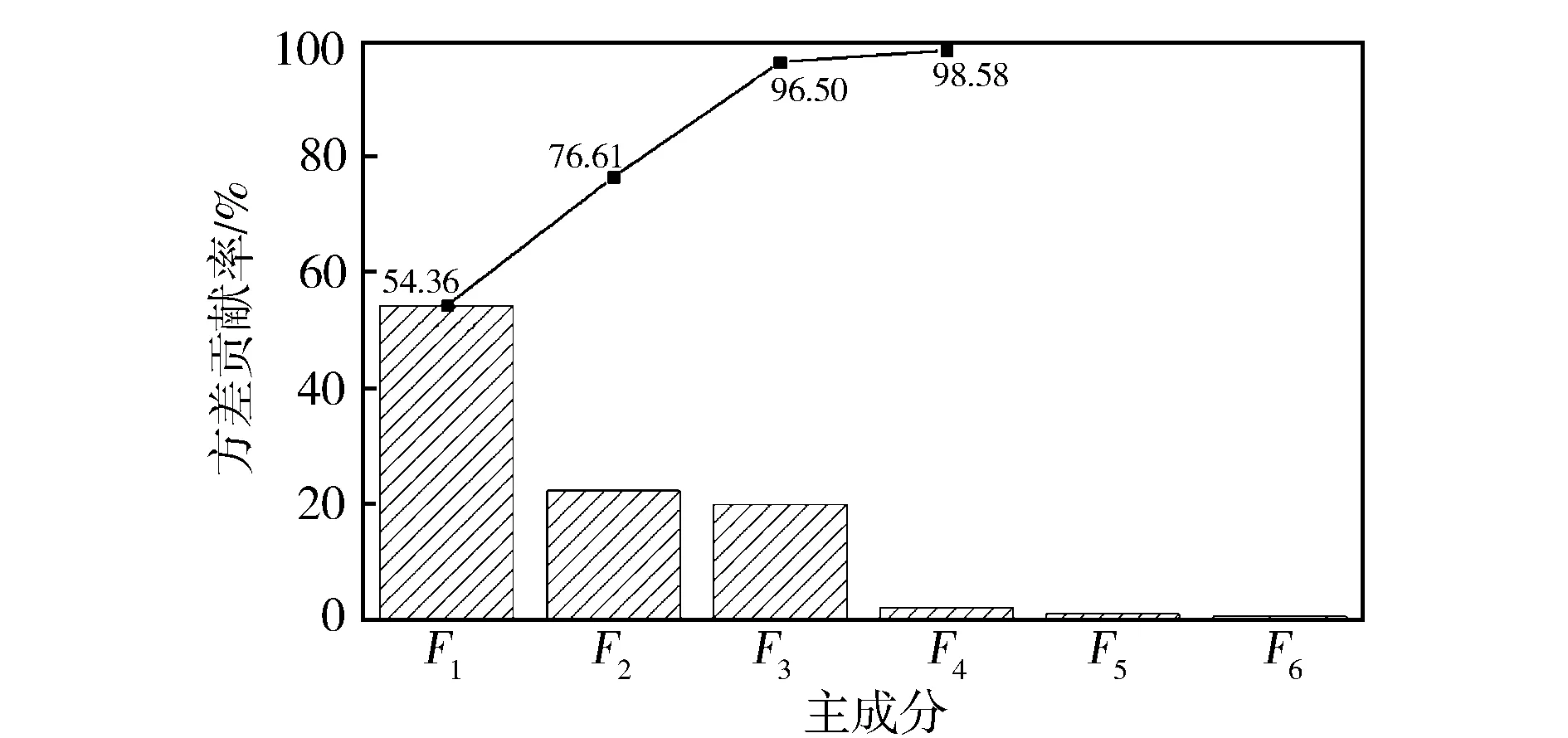
圖10 自適應PMP(v)策略主成分與方差貢獻率
主成分變換公式為
[F1F2F3F4]=W(r)Ccof(r)。
(20)
其中,Ccof(r)為變換矩陣:
(21)
3.4 坐標向量和坐標矩陣建立
對于樣本Yi,樣本時長為Ti,計算t時刻樣本Yi的主成分,得到主成分坐標:
φi(t)=[φi,l1(t),φi,l2(t),…φi,lq(t)]Ccof,
(22)

(23)
式中:ai,lj(t)為樣本Yi在[0,t]區間內的“車速-時間”數據計算出的特征參數Clj的值。
將樣本Yi每個時刻的樣本坐標向量合并為樣本坐標矩陣Φi,建立16個樣本坐標矩陣:
Φi=[φi(1),…φi(Ti)],i=1,…16。
(24)
樣本矩陣Φi的第t列向量代表t時刻樣本Yi在空間中的坐標,從第1列到第Ti列代表樣本Yi坐標從第1 s到第Tis的變化過程。
4 自適應PMP實時控制策略
4.1 在線樣本識別
車輛實時運行過程中,每個微行程開始,t=0,自適應PMP控制系統開始執行,系統開始記錄當前微行程內的車速信息,1 s記錄一次,并轉化為車輛實時行駛坐標數據庫X。微行程結束時,車輛停車,自適應PMP控制系統關閉,車輛車速信息和實時行駛坐標數據庫X清空。
在微行程內的t時刻,車速信息保存如下,最多保存150個車速信息。

(25)
通過以下公式將U(t)中的車速信息轉化為實時坐標向量:
x(t)=[xl1(t),…xlq(t)]·Ccof,
(26)

(27)
建立車輛運行過程中的行駛坐標矩陣X(t),X(t)每秒更新一次。

(28)
使用矩陣或者向量差的2-范數表征車輛實時行駛坐標與樣本坐標的之間的距離。當t<150 s時,由于數據量少,使用全部坐標數據判別當前行駛工況與每個樣本的接近度。當t≥150 s時,車輛實時工況趨向穩定,最后一個坐標向量包含了之前150 s內的所有數據,所以使用樣本坐標矩陣和行駛坐標矩陣的最后一個坐標向量判斷當前工況與每個樣本的歐幾里得距離。

(29)


(30)
4.2 協態變量修正
對于式(9),固定SOCf=0.3,調整SOC0分別為0.29,0.295,0.3,0.305,0.31,得到PMP全局優化控制策略下SOC變化曲線與相應的最優協變量λ*。圖11示出樣本Y1的SOC變化曲線, SOC0=0.31時SOCf不為0.3,是因為當APU完全不啟動時,依然無法達到SOCf=0.3。圖12示出樣本Y6的SOC變化曲線。
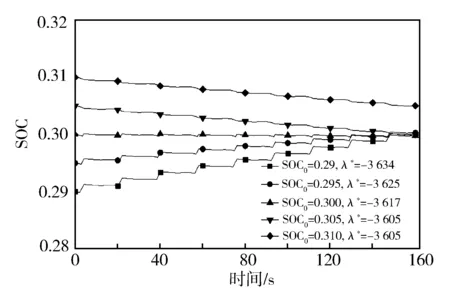
圖11 樣本Y1 SOC曲線與最優協變量
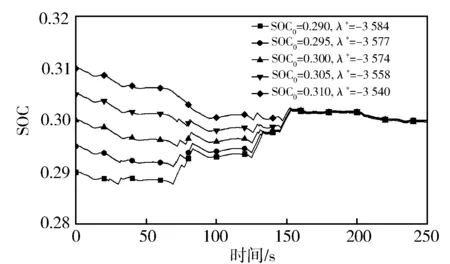
圖12 樣本Y6 SOC曲線與最優協變量
根據樣本Yi和初始SOC0,考慮到當SOC(t)<0.287 5時電池電量過低,APU需要啟動,而當SOC(t)>0.312 5時電池電量過高,APU需要關閉,修正后的自適應協態變量為
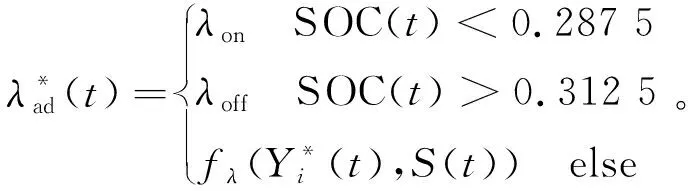
(31)
式中:λon是使APU必然啟動的協態變量,本研究中λon=-3 700;λoff是使APU必然關閉的協態變量,本研究中λoff=-3 400;S(t)是實時SOC(t)進行離散化修正后的值,離散化方法見圖13。

圖13 SOC(t)網格離散化方式
4.3 試驗仿真
分別使用SC03工況和HWFET工況進行PMP全局優化和自適應PMP控制策略的比較測試。圖14示出SC03工況圖,1個SC03循環過程中系統識別出的最接近樣本見圖15,在1個SC03循環中系統給出的最優協變量數值變化過程見圖16。由圖15和圖16可以看出,在每一個微行程內,自適應PMP(λ)控制策略都比自適應PMP(v)控制策略更快進入辨識穩定狀態。
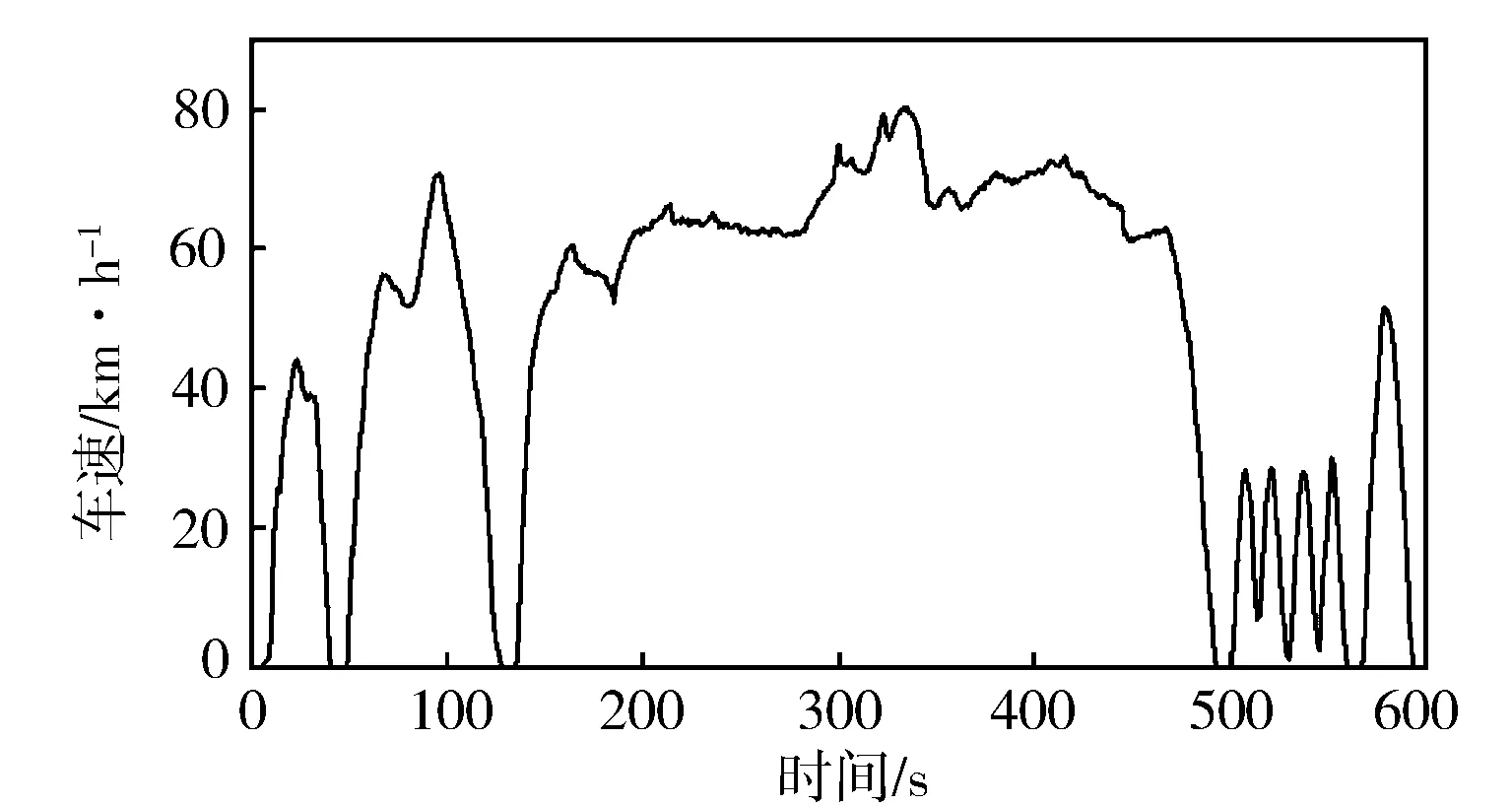
圖14 SC03工作循環
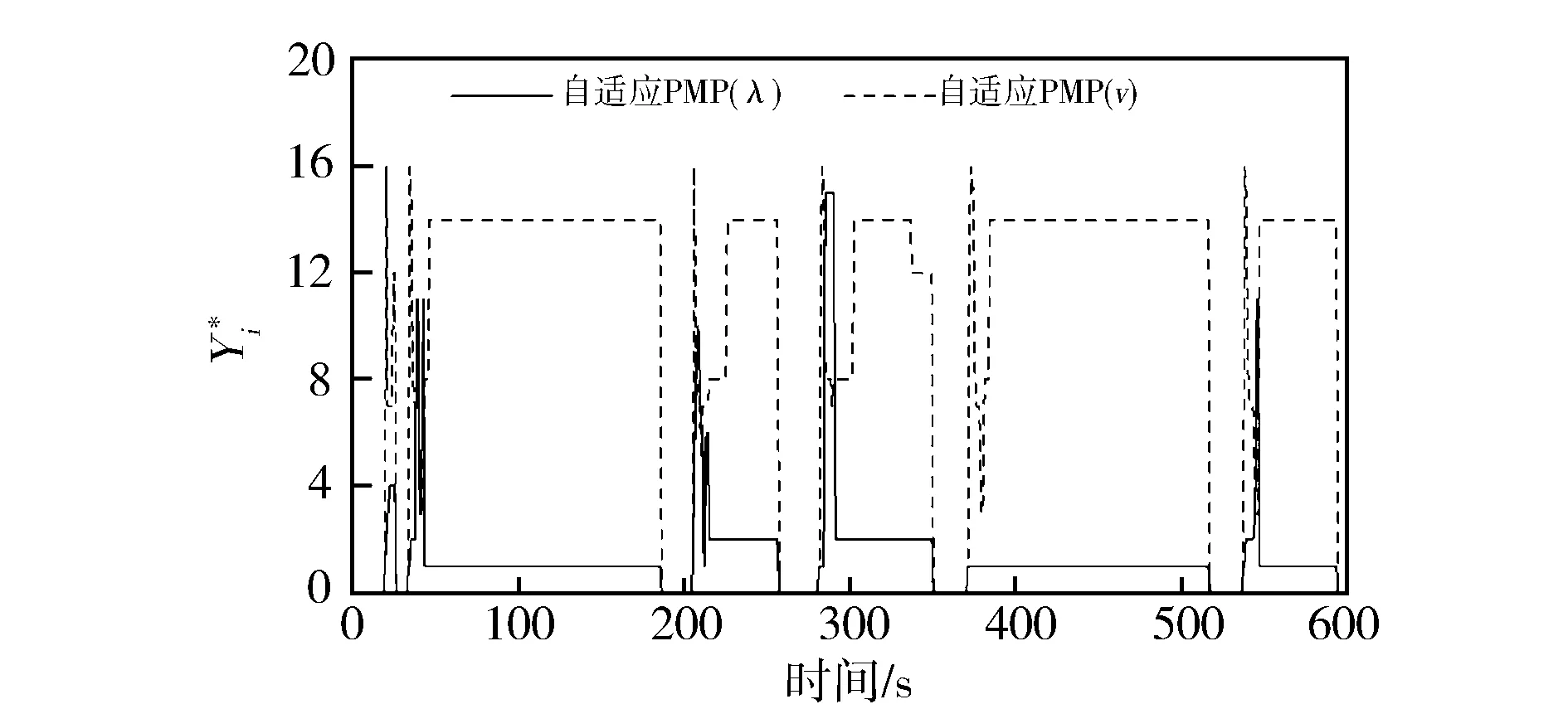
圖15 自適應PMP策略對SC03工況的樣本擬合
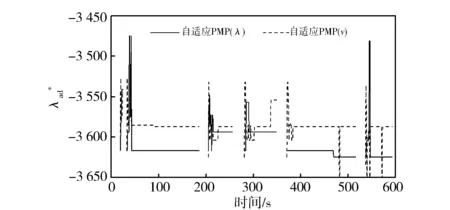
圖16 自適應PMP策略在SC03工況下的協變量
圖17和圖18示出10個SC03工況和10個HWFET工況的仿真結果。油耗仿真結果顯示,自適應PMP(λ)策略SOC邊界為0.292~0.302(SC03)和0.3~0.306(HWFET),由于SOC在線修正算法,自適應PMP(λ)策略比全局優化PMP策略的SOC邊界0.292~0.307(SC03)和0.275~0.31(HWFET)具有更小的SOC變化區間,有助于延長動力電池壽命。自適應PMP(λ)策略綜合百公里燃油消耗量為3.700 L(SC03)和4.906 L(HWFET),比全局優化PMP策略高1.5%~1.6%。

圖17 SC03工況下PMP控制SOC變化曲線
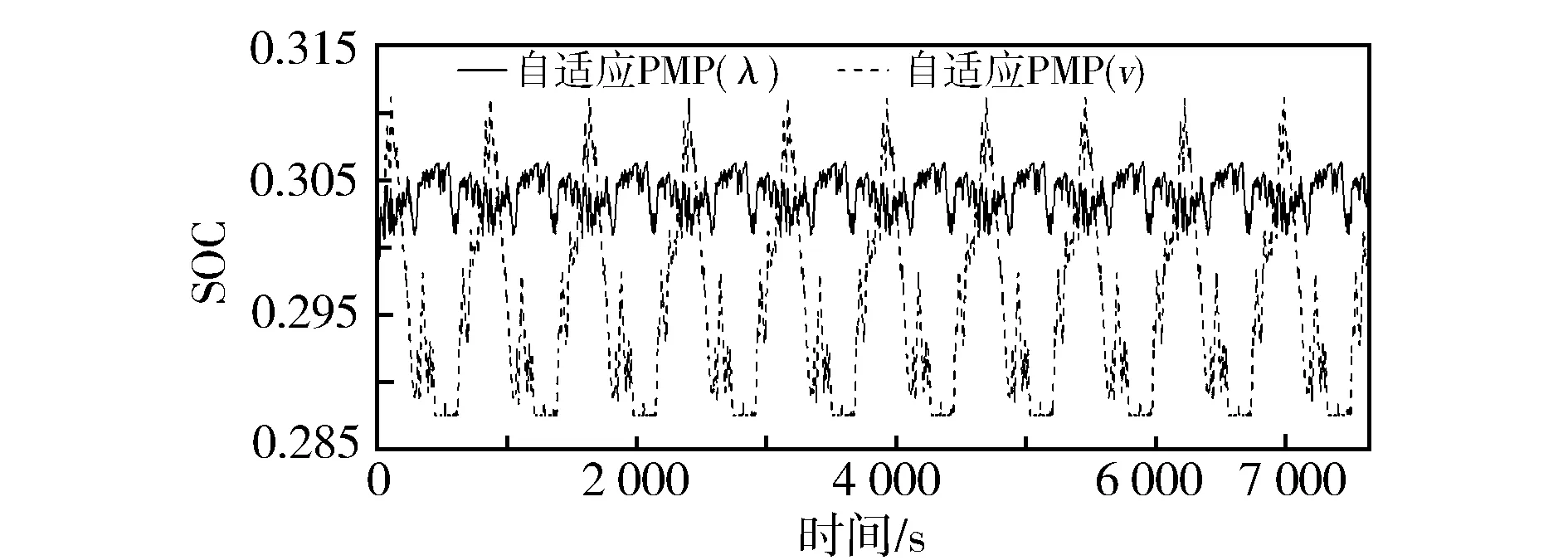
圖18 HWFET工況下PMP控制SOC變化曲線
自適應PMP(v)算法SOC邊界為0.287 5~0.3(SC03)和0.287 5~0.31(HWFET),實際上0.287 5是SOC在線修正策略所規定的硬邊界,說明自適應PMP(v)算法無法實現SOC自適應回正。自適應PMP(v)算法綜合百公里燃油消耗量為3.724 L(SC03)和4.937 L(HWFET),兩種工況下均高于自適應PMP(λ)策略。
表2列出自適應PMP(λ)策略的實時優化結果。相比全局優化PMP算法提前知道工況數據下的結果,自適應PMP(λ)策略的油耗僅增加1.6%,但是無需提前知道工況數據,具有較高的工況自適應能力,有利于提高電池壽命。同時自適應PMP(λ)策略在電池壽命和油耗上都好于自適應PMP(v)策略。
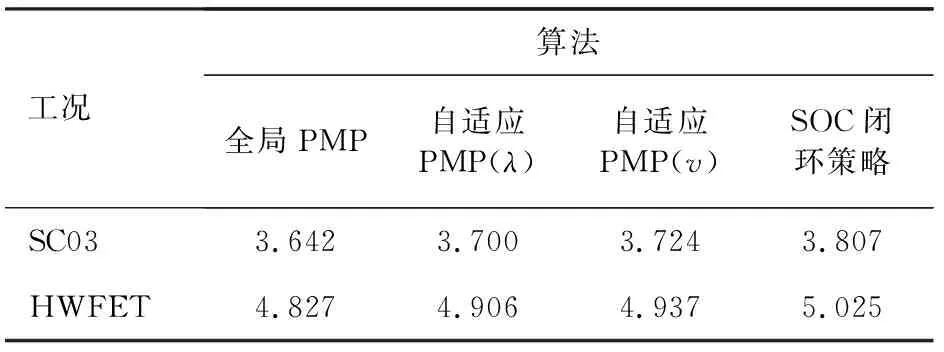
表2 百公里燃油消耗量仿真結果 L
5 結束語
以增程式電動汽車的能量優化管理為研究對象,分析了PMP控制最優協態變量與行駛工況特征參數的關系,實現增程式電動車在未知工況下PMP控制中的協態變量自適應優化。
以PMP控制策略協態變量作為特征參數相關性分析的依據建立工況識別策略,具有較好的工況識別效果,有助于節省燃油消耗,延長動力電池壽命。
在不同的控制策略下,根據控制策略的決策變量選擇工況特征參數進行工況辨識,可以實現更好的自適應控制效果,優于根據經驗選擇特征參數和根據油耗選擇特征參數進行工況辨識。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
能源工程(2020年6期)2021-01-26 00:55:22
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
數學大世界(2018年1期)2018-04-12 05:39:14