基于ANP-SVR 的駕駛員能力預測模型設計
2021-02-27 07:58:36王時敏孫濤
農業裝備與車輛工程 2021年2期
王時敏,孫濤
(200093 上海市 上海理工大學 機械工程學院)
0 引言
縱觀中國汽車行業,無人駕駛近年來正在成為其中的新興熱點[1]。世界范圍內應用最廣泛的SAE 分級標準將自動駕駛分為0 到5 的等級。在完全或高度自動駕駛汽車并未普及時,無人車上路行駛必將遇到人類駕駛的普通車輛,或低級別的有駕駛員監測的人機共駕汽車。在道路交通中,由人的因素導致的道路交通事故占90%左右,而駕駛員因素占人的因素的大部分[2]。駕駛員特征的建模是一個更詳細的問題,引起了研究人員關注[3]。Enev[4]等利用了汽車傳感器數據識別駕駛員,但是沒有進行分類或駕駛能力判斷。對于人機共駕以及駕駛員行為特性的方向需要深入的研究。開發人機交互式駕駛模擬仿真系統,可以為基于人車路協同的智能汽車與智能交通系統的研究提供關鍵技術手段。
本文針對駕駛員在高度無人駕駛中人機共駕的駕駛權分配問題,基于Prescan 智能駕駛仿真平臺,進行駕駛場景搭建,設計了自由行駛、調頭、紅燈、跟車等駕駛工況,搭建了人機交互式的駕駛仿真系統進行數據采集實驗。通過網絡分析法(ANP)進行了駕駛特性指標數據分析,運用熵權法進行駕駛風險度分析,從而研究駕駛員能力與風險度的關系。此外,本研究還建立了基于SVR 算法的駕駛能力預測模型,為進一步研究駕駛員駕駛能力的動態分析進行鋪墊。
1 駕駛模擬器的仿真模型搭建和硬件配合
實驗的仿真駕駛場景模型搭建的準則是不能割裂人-車-環境彼此之間的關系[5],所以利用羅技G27 力反饋方向盤踏板套裝實現人機交互,利用MATLAB 以及CarSim 聯合仿真搭建駕駛模擬器的仿真環境和車輛模型,進行數據采集與整合。
1.1 仿真環境模型的搭建
在本次實驗中,視覺駕駛場景利用Prescan軟件來完成。TNO 公司旗下子公司Tass international的Prescan軟件是一個開發駕駛輔助、ADAS 和智能汽車系統的仿真平臺,其具有快速建立以及修改三維駕駛場景的優點,可以大大縮短研發周期,其能與MATLAB/Simulink 無縫銜接,配合CarSim 完成完美的實車狀態仿真。整車模型采用CarSim 軟件來搭建車輛的動力學模型。此外,本文在Prescan 道路模型內設置了紅綠燈、行人、對向車流等動態仿真駕駛環境因素,以及按照道路規定設計了城市道路和高速道路。
1.2 駕駛模擬器的硬件架構
硬件方面主要包括輸入裝置、處理裝置和輸出裝置。輸入裝置是羅技G27 力反饋方向盤套裝,其搭配有方向盤、排擋和踏板裝置,其11 英寸的金屬方向盤轉向范圍有900°,與真實的汽車方向盤一致。處理裝置采用的是戴爾G7 游戲本,視覺反饋的輸出裝置是一個外接的23.8 寸顯示屏。駕駛模擬器的硬件結構如圖1 所示。

圖1 駕駛模擬硬件架構Fig.1 Driving simulation hardware architecture
2 數據采集與指標選取
2.1 模擬駕駛實驗與數據采集
實驗邀請若干位志愿者參與,年齡在23~42周歲之間,駕齡在1.5~10 年,均在身體健康、無不良嗜好且清醒狀態下參與了實驗數據采集,保證了仿真實驗的有效性和真實性。由于仿真與真實的駕駛體驗有一定差距,這個是任何駕駛仿真無法避免的,所以實驗開始后會先讓駕駛員自主適應一段時間。實驗步驟:
(1)駕駛員按照自身條件調整踏板和座椅的距離,找到合適的姿勢開始實驗。(2)用20~30 min 適應實驗環境和模擬駕駛場景。(3)開始駕駛模擬車輛,先是城市道路自由行駛,后進入高速道路進行跟車工況實驗。(4)前車下高速行駛一段后制動,本車隨即制動,實驗結束。
2.2 基于實驗數據的駕駛能力指標選取
采集到的原始數據距離后續分析所需要的指標還有一些差距。首先查閱文獻資料,初步確定了9 項駕駛能力指標:跟車時距FT、平均速度差MDV、速度波動標準差SDS、沖擊度MJt、轉向盤角速度Momega、加速度標準差Std_a、車道線偏移標準差Std_d、平均速度Va、反應時間RT。通過比較相關度、重要性以及對于駕駛能力的體現,經過篩選保留了表1 所示的6 項指標。
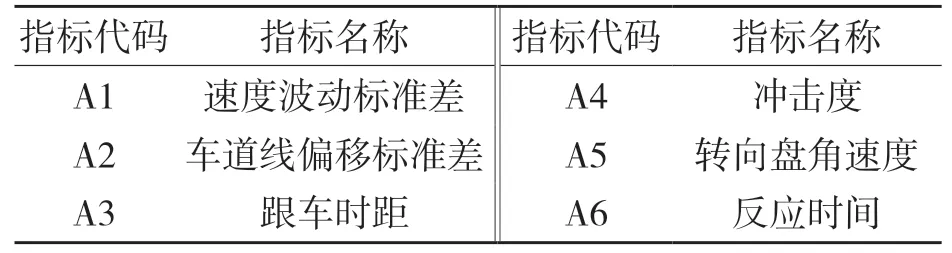
表1 指標列表Tab.1 Indicator list
3 基于駕駛數據的駕駛能力分析
3.1 網絡分析法(ANP)
駕駛能力是一個模糊的概念,要用多重指標各有權重地去考量。引入層次分析法(AHP)。層次分析法是美國著名的運籌學家Satty 教授等人在20 世紀70 年代提出的[6],是一種將定性和定量相結合的多準則決策方法。由于AHP 計算時有各層次元素之間要相互獨立的前提,不能很好地運用到處置駕駛能力指標互相之間的關聯性、依存與反饋問題,而針對AHP 的缺陷發展起來的網絡分析法ANP 正好能解決問題。
ANP 的典型結構如圖2 所示。目標層和準則層又并稱為控制層,控制層不一定要有準則,但至少要有一個目標作為控制元素。
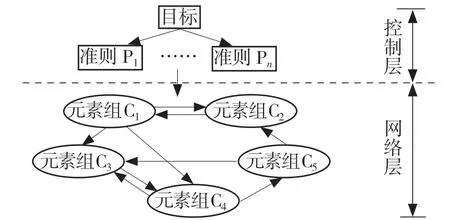
圖2 ANP 網絡分析法結構模型Fig.2 ANP structure model
ANP 以一種相對的標度法,充分利用人的經驗以及判斷計算對于所求變量的各個因素的權重。
3.2 支持向量回歸(SVR)
SVR(Support Vector Regression)是基于支持向量機(SVM,Support Vector Machine)改進后專門用來解決回歸問題的模型[7],其與SVM 之間區別在于,SVM 是找一個分類超平面,使得邊界上的點到此平面的距離最遠,而SVR 回歸則是讓每個點到回歸線的距離最小,即對數據進行擬合,如圖3 所示。
3.3 基于ANP-SVR 的駕駛員能力預測模型設計
使用網絡分析法ANP 的目標是確定各評價指標對于駕駛能力評價的權重,為SVR 的駕駛員能力預測模型提供訓練及測試數據庫。
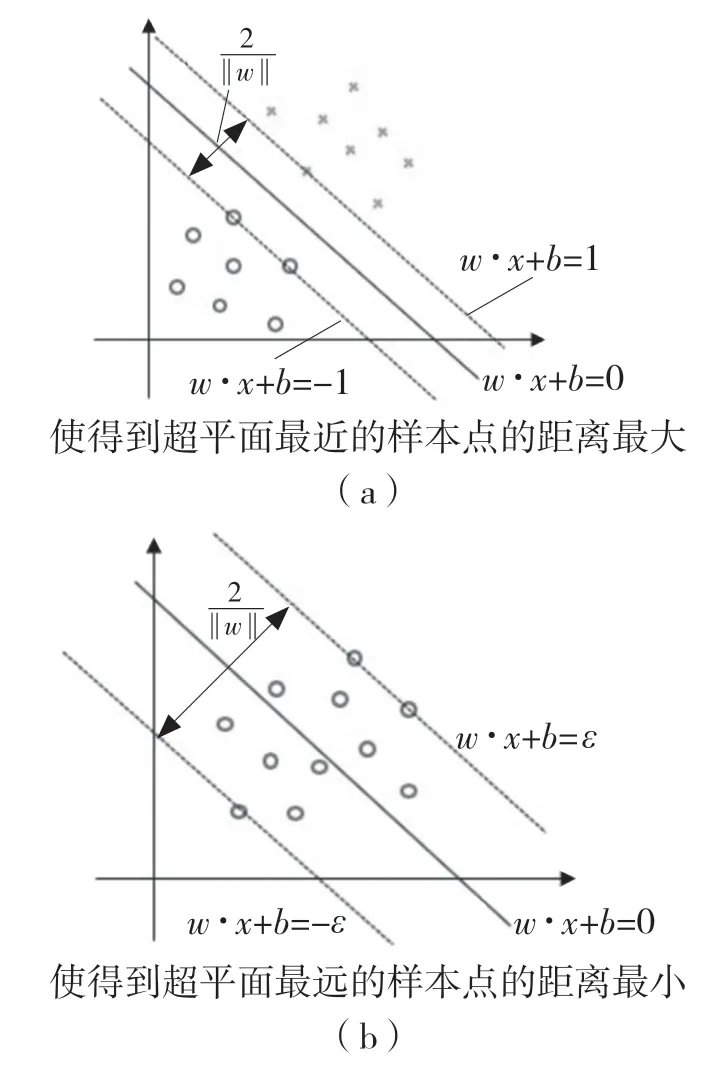
圖3 SVM 與SVR 的區別Fig.3 Difference between SVM (left) and SVR (right)
ANP-SVR 具體步驟[8-10]:
(1)建立網絡層次結構
控制層的目標是確定選取的駕駛能力指標對于最終駕駛員能力打分的權重大小。網絡層分為操縱能力、感知能力和變量3 個元素。操縱能力元素的子元素有橫向操縱和縱向操縱,感知能力元素的子元素為反應能力。變量元素的子元素為上文所決定的6 項駕駛能力指標。具體如圖4 所示,在軟件SuperDecisions 內搭建并實現(環形箭頭表示元素內部的影響,直線、雙向箭頭表示元素之間的相互依存與反饋關系)。
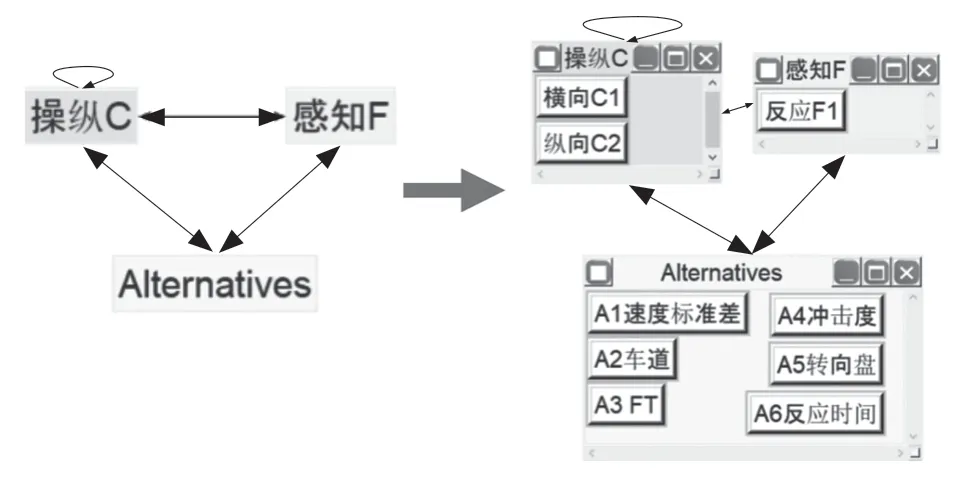
圖4 駕駛能力評估ANP 網絡層結構圖及分解圖Fig.4 ANP network layer structure diagram and exploded diagram of driving ability evaluation
(2)構造超矩陣并進行一致性檢驗
構造超矩陣,就要引入標度法,本次采用的是1-9 標度法,具體如表2 所示。
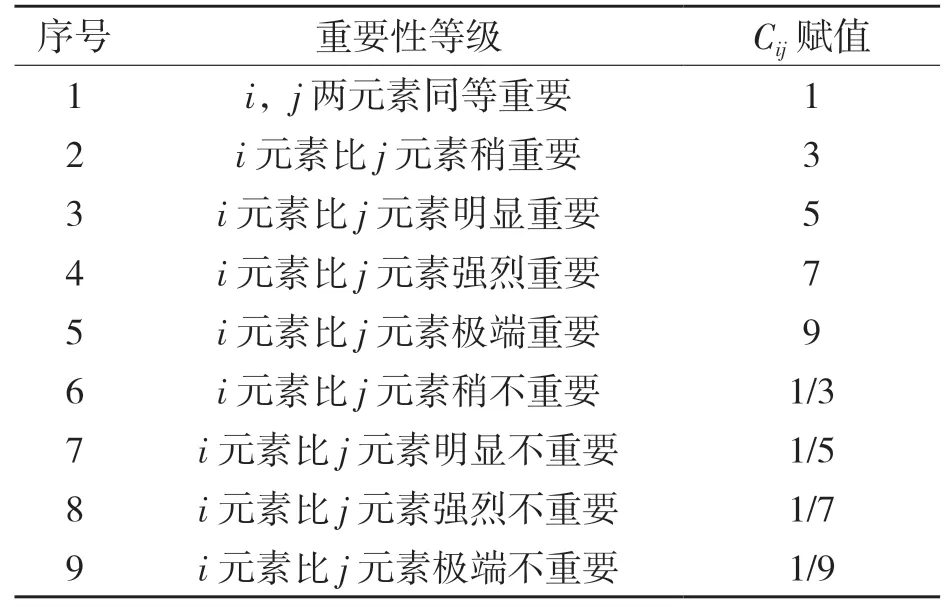
表2 1-9 標度法賦值含義Fig.2 Meaning of 1-9 scale assignment
利用以上標度法逐個構造成對比較矩陣,并判斷矩陣的一致性系數CR 是否小于0.1,當CR<0.1 時才表示判斷矩陣合理,否則需要修正比較矩陣。成對比較矩陣的數量由元素間的依存與反饋關系決定,成對比較矩陣得出的元素局部權重構建了未加權超矩陣Wij見表3,而后利用SuperDecisions 計算加權超矩陣見表4,并進行穩定性處理,生成最后的極限超矩陣見表5,得出全局權重。極限超矩陣中每一行的數字相同,該數字就是該行影響因素的全局權重。
(3)利用ANP 的計算結果將駕駛能力數值化
首先,將A1 到A6 六個指標的具體數據進行歸一化,然后考慮到某些指標越大越好,某些指標越小越好,便把他們化歸為同一方向的能力評價指標,并模糊至0~10 的范圍,即建立了初始能力矩陣。矩陣每一行是一組初始駕駛能力,將其與ANP 的分析結果相結合,得到該組加權的駕駛能力評分數值。
(4)基于SVR 的駕駛能力預測
引入SVR 回歸,將FT(跟車時距)、MDV(平均速度差)、MJt(沖擊度)、Momega(轉向盤角速度)、Std_a(加速度標準差)、Std_d(車道線偏移標準差)、RT(反應時間)作為輸入,駕駛能力評分數值作為輸出,建立回歸模型。具體步驟如圖5 所示,主要分為數據預處理(歸一化處理)、核函數的選擇、計算最優初始參數、建立SVR 回歸模型、模型檢驗[9]。
回歸模型的建立主要是在MATLAB 的基礎上調用LibSVM 包來實現。確定了核函數及參數C、g 之后,就可以開始構建SVR 預測模型。具體操作如下:
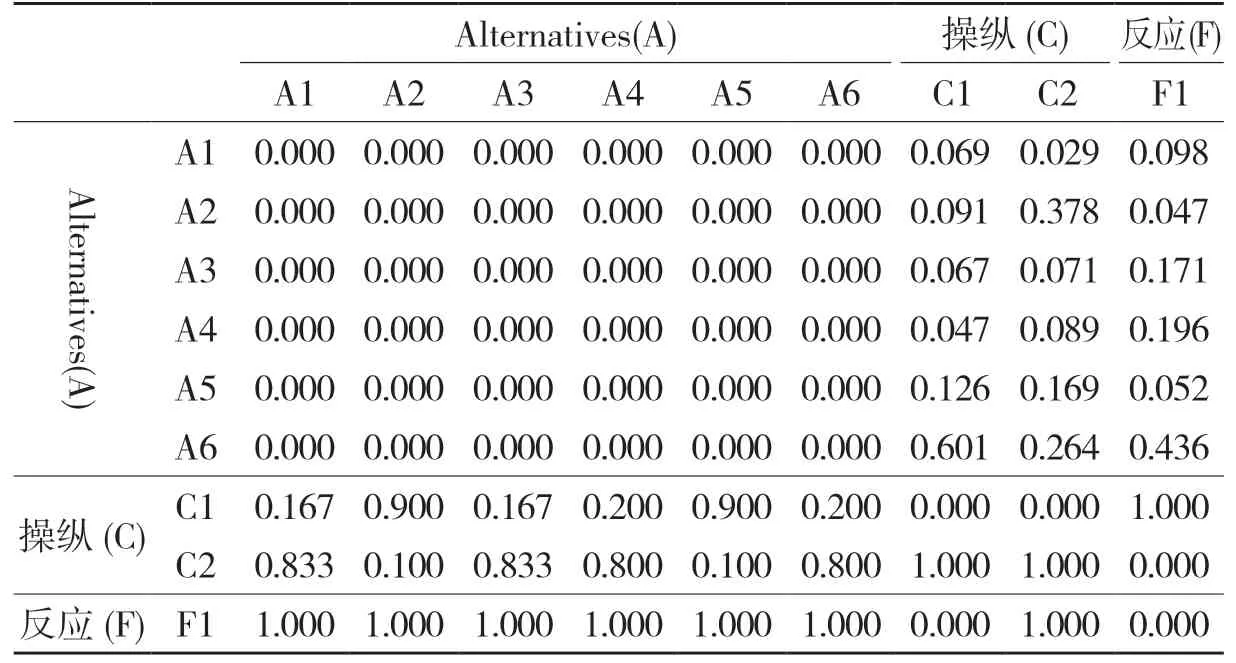
表3 未加權超矩陣WijTab.3 Unweighted supermatrix Wij
表4 加權超矩陣Tab.4 Weighted supermatrix
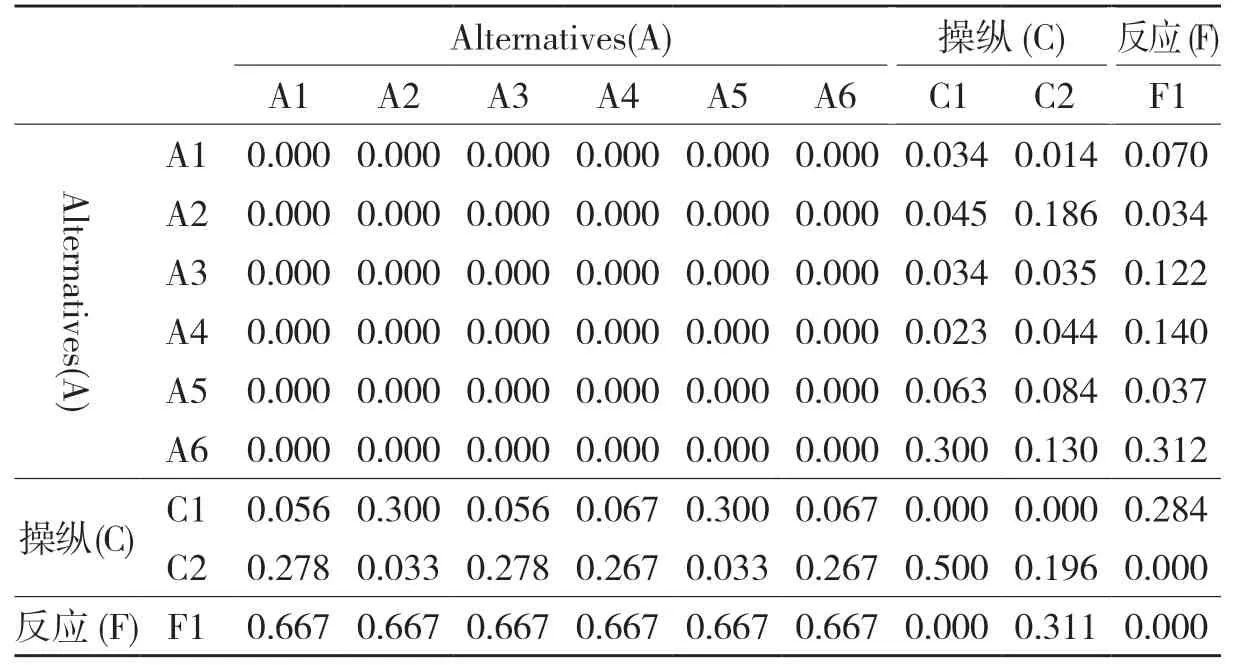
表4 加權超矩陣Tab.4 Weighted supermatrix
表5 極限超矩陣Tab.5 Extreme supermatrix
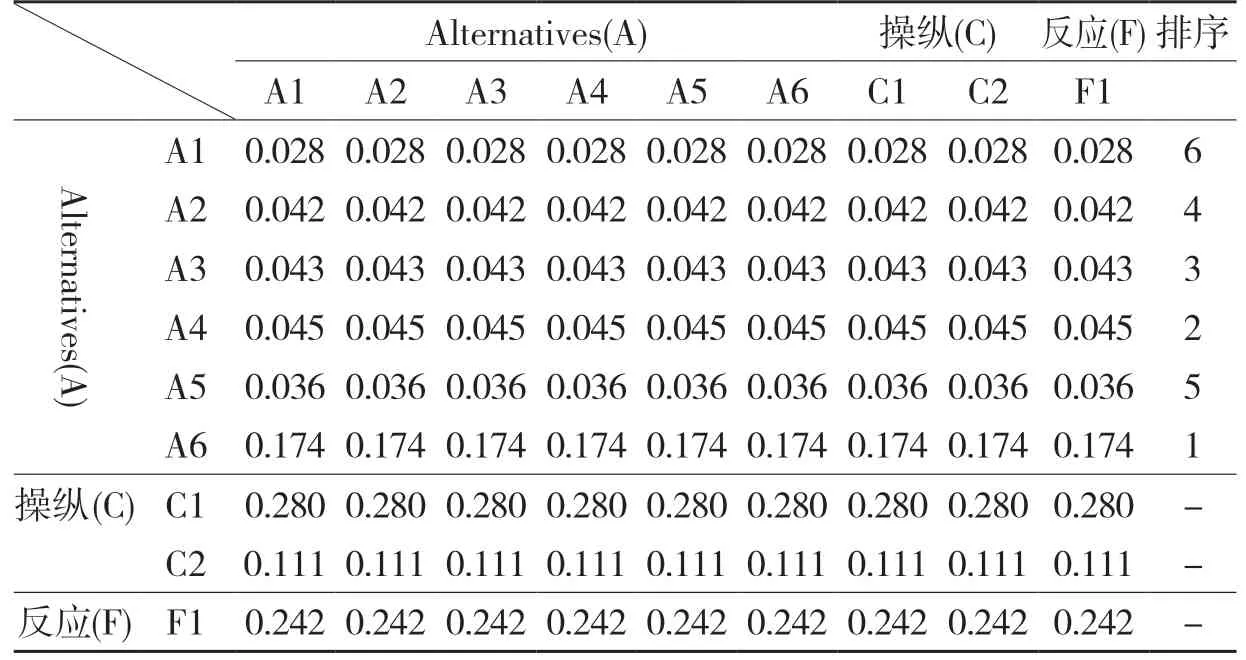
表5 極限超矩陣Tab.5 Extreme supermatrix
第1 步,數據劃分。將準備好的數據樣本進行劃分,其中1~50 組數據樣本作為訓練集,51~66 組數據樣本作為測試集;
第2 步,基于MATLAB 及LibSVM 建立SVR預測模型,并使用測試集數據進行驗證;
第3 步,得出預測值與原始值的對比圖并計算均方誤差MSE 及決定系數R2。
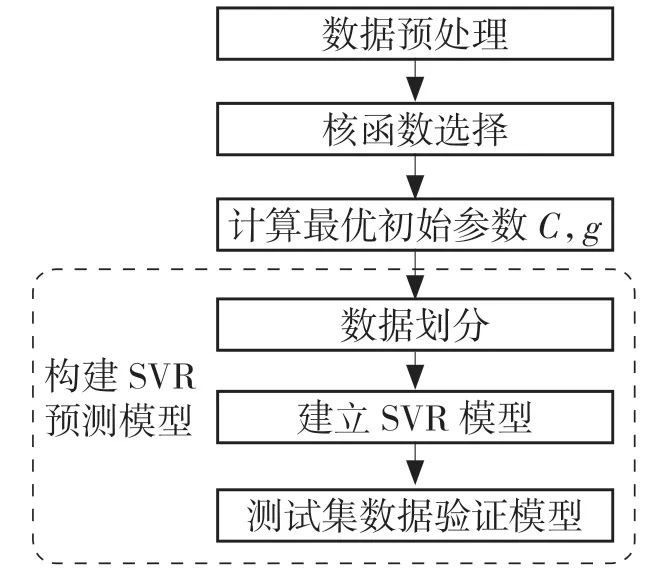
圖5 SVR 算法流程圖Fig.5 SVR algorithm flowchart
預測值與原始值的對比如圖6所示。從圖6 可以看出,SVR 預測值與原始值十分接近,均方誤差值很小,決定系數R2約等于0.99,測試結果說明訓練效果優秀,那么使用SVR 預測駕駛能力是十分具有可行性的,且后續可以用于實時駕駛能力的預測。
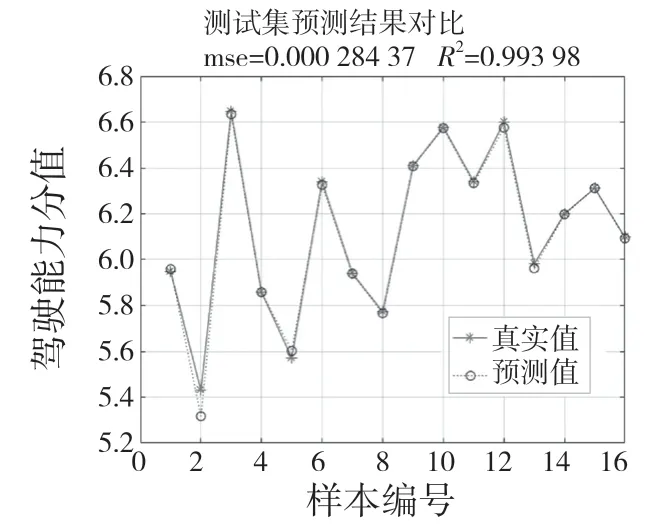
圖6 預測值與原始值對比圖Fig.6 Comparison chart of predicted value and original value
3.4 駕駛風險度分析
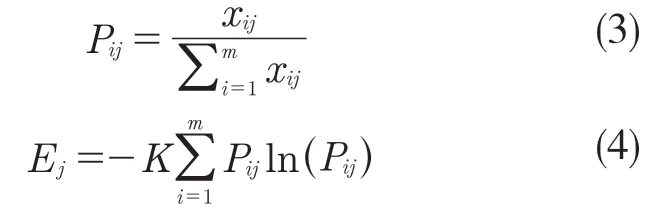
本小節用到源于熱力學的熵值概念進行駕駛風險度分析,熵是對系統不確定性的一種度量[10],駕駛數據體現的不確定性便是駕駛風險度。通過熵值法得到各個指標的信息熵,信息熵越小,信息的無序度越低,信息的效用值越大,指標的權重越大。用Pj表示第j 個信息的不確定度(也即出現的概率),則整個信息(設有n 個)的不確定性度量公式為

式中:E——熵;K=1/ln(m);Pj——第j 個信息的不確定度
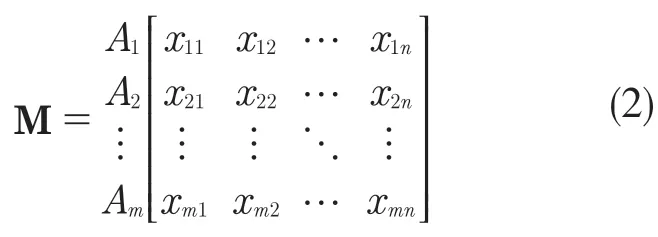
建立多屬性決策矩陣:
則第j 個屬性下第i 個方案Ai的貢獻度:
定義 dj為第 j 屬性下各方案貢獻度的一致性程度:

則各屬性權重 Wj如下:

各項權重的和為1,建立駕駛風險度模型為各項指標的加權平均值:

將3.3 節中運用ANP 計算出的駕駛能力與駕駛風險度隨機選出20 組相對比,結果如圖7 所示。將2 項排名數據在Excel 內進行相關性分析,計算出的相關性系數R=0.763 9>0.7,說明兩項數據的關系緊密程度為非常緊密,即ANP 駕駛能力與駕駛風險度在總體上具有一致性,且緊密相關。
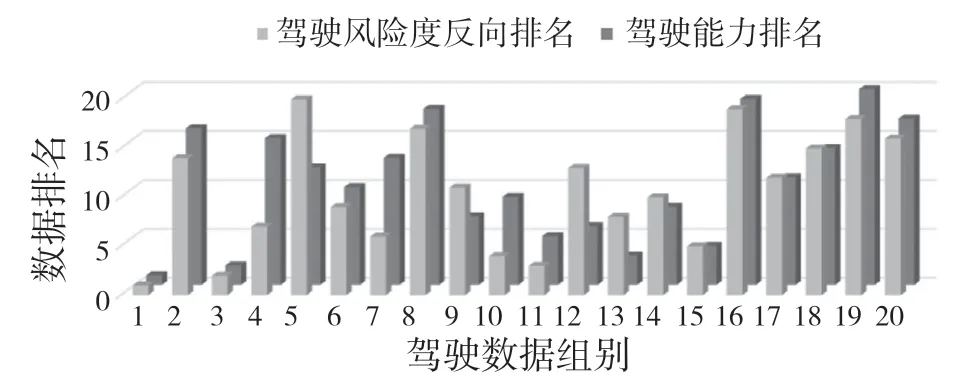
圖7 駕駛風險度與駕駛能力對比Fig.7 Comparison of driving risk and driving ability
以上結果可以從側面印證ANP 算法應用于駕駛能力評估的準確性。
4 結論
本研究基于Prescan 仿真平臺搭建的駕駛場景,開發了人機交互式的駕駛仿真系統進行數據采集實驗,得出結論如下:
(1)計算了在駕駛能力判斷中各評價指標因素的權重,得出了沖擊度、跟車時距、反應時間是判斷駕駛能力的主要指標。對于駕駛輔助系統以及高級無人駕駛系統,可以在這些方面為駕駛員提供輔助;
(2)通過ANP 和SVR 算法建立了駕駛能力預測模型,模型精度高,預測值決定系數R2為0.99,可為實時駕駛能力預測的研究進行鋪墊;
(3)基于熵權法計算駕駛風險度,通過將駕駛風險度與駕駛能力評估的數據相比較,其得出了數據的一致性,駕駛員的駕駛風險度越大,駕駛能力打分就越小。驗證了ANP 分析法應用于駕駛員能力評估的可行性。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
發明與創新(2022年30期)2022-10-03 08:40:56
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
人大建設(2018年6期)2018-08-16 07:23:10
文理導航·科普童話(2017年5期)2018-02-10 19:42:14
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
公民與法治(2016年4期)2016-05-17 04:09:26
