基于碰撞行為預測的智能網聯汽車狀態控制的研究
2021-02-28 11:53:53陳欣宇李沁穎
電腦知識與技術 2021年35期
陳欣宇 李沁穎

摘要:智能網聯汽車狀態控制是網聯汽車自動化駕駛的關鍵技術,目前受到了廣泛的關注,但存在無法準確預測汽車碰撞行為以及無法對網聯汽車狀態進行控制的研究難點。針對上述問題,本文結合大數據技術、碰撞行為預測、智能網聯汽車的狀態控制,以實現車輛的安全駕駛。構建萬車事故率、夜間事故比例、人為因素事故三維路面危險程度分析模型對智能網聯汽車的碰撞行為進行危險程度劃分。同時,通過車輛傳感器獲取車輛當前駕駛狀態信息并結合危險程度劃分結果,應用蒙特卡洛模型分析車輛實際行駛過程中的碰撞風險率,根據風險值及危險程度對當前車輛做控制決策,從而有效地降低交通事故發生率,提高車輛駕駛的安全性和有效性。
關鍵詞:智能網聯汽車;碰撞行為預測;狀態控制
中圖分類號:TP311 ? ? ?文獻標識碼:A
文章編號:1009-3044(2021)35-0077-03
Research on Intelligent Networked Vehicle State Control based on Collision Behavior Prediction
CHEN Xin-yu, LI Qin-ying
( Jiangxi University of Technology ,Nanchang 330200,China)
Abstract:The state control of intelligent connected vehicle is the key technology for the automatic driving of connected vehicle, which has received extensive attention at present, but there are some difficulties in the research, such as the inability to accurately predict the collision behavior and the inability to control the state of connected vehicle. Aiming at the above problems, this paper combines big data technology, collision behavior prediction and state control of intelligent networked cars to realize safe driving of vehicles. A three-dimension road hazard analysis model, including the accident rate of 10,000 vehicles, the proportion of accidents at night and the human factors, was constructed to divide the collision behaviors of intelligent connected vehicles into hazard degrees. At the same time, through the vehicle sensors vehicle state information and combining with the current driving dangerous levels as a result, the application of monte carlo model analysis in the process of vehicle real driving collision risk, according to the risk value and the danger degree to the current vehicle control decisions, effectively reduce the incidence of traffic accidents, improve the driving safety and effectiveness.
Key words: intelligent network vehicle; collision behavior prediction; state control
1引言
隨著“互聯網+”時代的到來,物聯網、大數據、云計算等新一代信息技術迅速成長,汽車的智能化,車聯網的構建、智能道路交通系統的形成和智慧城市的建設是人民日益增長的美好生活需要的迫切要求。文獻[1]指出要推動智能網聯汽車產業的發展,就要符合中國國民的需求,同時要在關鍵技術、車輛安全等方面進行突破。文獻[2]提出隨著智能網聯汽車產業的發展,人為因素是導致交通事故發生的重要原因之一。文獻[3]則提出道路交通事故率也是交通事故發生的重要因素。因此,文獻[4]指出智能網聯汽車技術和車輛風險碰撞受到了廣泛的關注。碰撞行為預測作為智能網聯汽車狀態控制的未來發展趨勢,起著不可或缺的作用,文獻[5]提出傳統車輛的碰撞行為預警只能預警是否會發生碰撞,而無法判別即將發生碰撞的嚴重程度,并且也無法提前提醒駕駛員去做出反應。本文利用大數據等技術構建三維路面危險程度分析模型,同時應用蒙特卡洛模型分析車輛實際行駛過程中的碰撞風險,根據風險值及危險程度對當前車輛狀態做出控制決策。
2智能網聯汽車危險碰撞分析模型
2.1智能網聯汽車碰撞行為
碰撞行為是指兩個或多個物體發生相對運動時,它們的運動狀態在極短時間內發生了顯著變化的行為過程。汽車在高速行駛的過程中,由于駕駛員反應不及時、周圍環境變化、路況突變等各種原因,使得車輛的運動狀態發生改變,從而導致碰撞行為的產生[6]。碰撞行為產生的原因有三種:一是由于汽車行進的路段是事故常發生路段;其次是汽車行駛的時間范圍;最后則是由于駕駛人對危險作出反應不及時。為了綜合考慮這三類使得汽車產生碰撞行為的原因,本文通過車輛傳感器來獲取車輛當前駕駛狀態信息以及事故路段信息。
2.2獲取事故路段信息
信息感知是智能網聯汽車的關鍵,要真正實現無人駕駛的目標,就要對車輛的狀態參數和周圍環境有一個非常清晰的控制,而信息的獲取也依賴先進的傳感器。車載電腦通過接收傳感器獲取的車輛周圍的路段信息以及駕駛狀態信息,連接互聯網從云服務臺獲取大量萬車公里事故率、夜間事故率及人為原因事故比例等相關信息,同時利用大數據技術對數據進行清理和處理,并存入磁盤中以方便瞬時調用數據檢測,為發明提供建立模型分析路段危險程度的資料做好前期工作。圖1為獲取事故路段信息的基本流程圖。
2.3建立危險程度分析模型
2.3.1模型危險參數的確定
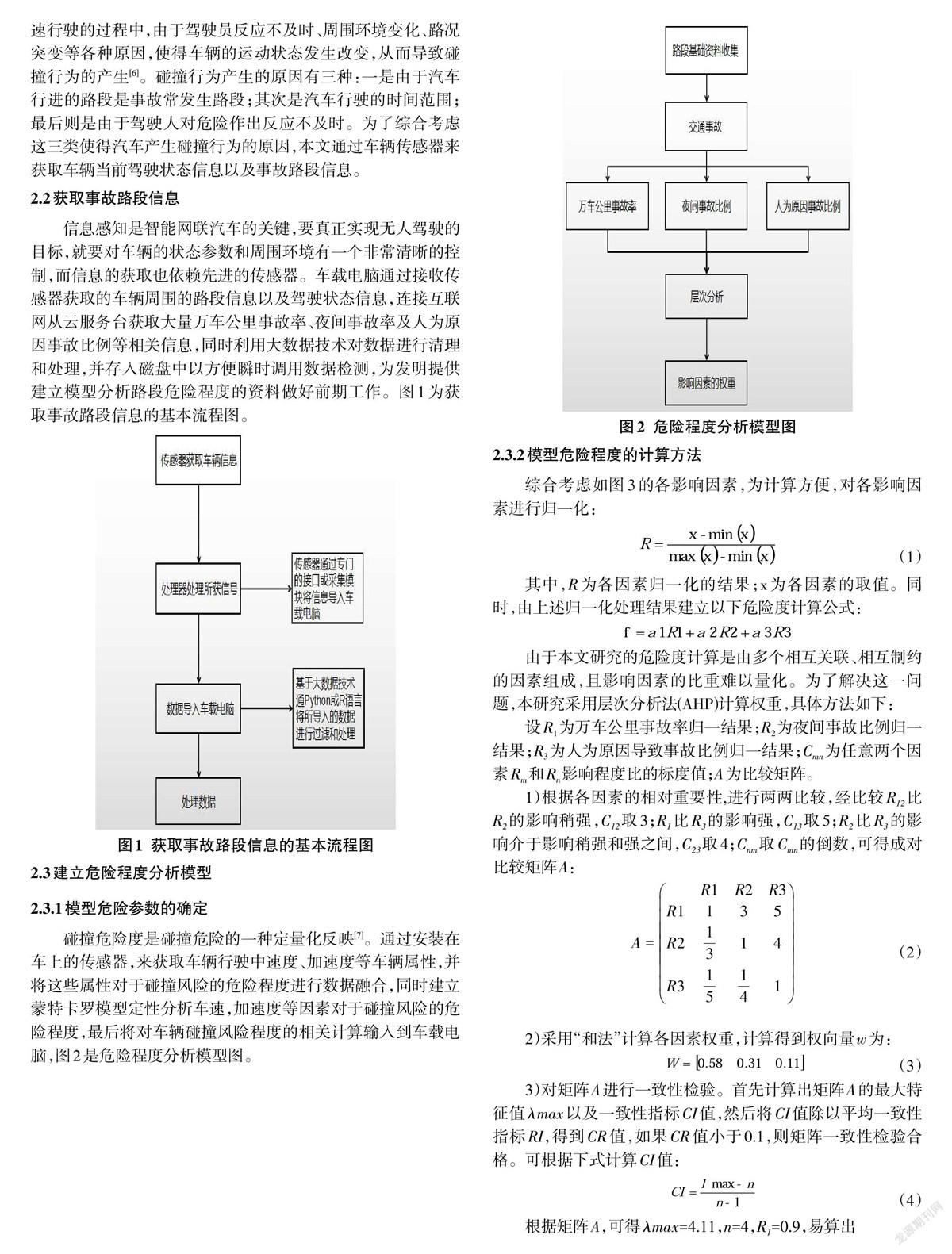
碰撞危險度是碰撞危險的一種定量化反映[7]。通過安裝在車上的傳感器,來獲取車輛行駛中速度、加速度等車輛屬性,并將這些屬性對于碰撞風險的危險程度進行數據融合,同時建立蒙特卡羅模型定性分析車速,加速度等因素對于碰撞風險的危險程度,最后將對車輛碰撞風險程度的相關計算輸入到車載電腦,圖2是危險程度分析模型圖。
2.3.2模型危險程度的計算方法
綜合考慮如圖3的各影響因素,為計算方便,對各影響因素進行歸一化:
(1)
其中,R為各因素歸一化的結果;x為各因素的取值。同時,由上述歸一化處理結果建立以下危險度計算公式:
由于本文研究的危險度計算是由多個相互關聯、相互制約的因素組成,且影響因素的比重難以量化。為了解決這一問題,本研究采用層次分析法(AHP)計算權重,具體方法如下:
設R1為萬車公里事故率歸一結果;R2為夜間事故比例歸一結果;R3為人為原因導致事故比例歸一結果;Cmn為任意兩個因素Rm和Rn影響程度比的標度值;A為比較矩陣。
1)根據各因素的相對重要性,進行兩兩比較,經比較R12比R2的影響稍強,C12取3;R1比R3的影響強,C13取5;R2比R3的影響介于影響稍強和強之間,C23取4;Cnm取Cmn的倒數,可得成對比較矩陣A:
[A=R1R2R3R1135R21314R315141] ? ? ? ? ? ? ? ? ? ? ? ? ?(2)
2)采用“和法”計算各因素權重,計算得到權向量w為:
(3)
3)對矩陣A進行一致性檢驗。首先計算出矩陣A的最大特征值λmax以及一致性指標CI值,然后將CI值除以平均一致性指標RI,得到CR值,如果CR值小于0.1,則矩陣一致性檢驗合格。可根據下式計算CI值:
(4)
根據矩陣A,可得λmax=4.11,n=4,R1=0.9,易算出
因為CR小于0.1,所以可以將矩陣W作為各因素的權向量。由上述權值的計算結果可得危險度計算公式為:
[f=0.58R+0.31R2=0.11R3] ? ? ? ? ? ? ? ? ? ? ? ?(5)
f表示危險度;R1,R2,R3表示各因素歸一化結果。將上述建模方法及相關公式所得出計算結果導入車載電腦中。
3 智能網聯汽行為預測
3.1數據處理
利用交通信息中心TIC計算路側單元RSU所轄通信區域內車道上任意兩車Ti、Tj;之間的碰撞概率p= f(Ti,Tj);并設定:絕對安全距離(Sa);前方車輛突然制動時,即速度瞬時為零,保證后方車輛不與之發生碰撞的安全距離;相對安全距離(Sr):前方車輛遇到危險情況減速,后車隨之減速,保證后方車輛不與之發生碰撞的安全距離;因此,車輛碰撞風險為:
[p=number(Sr<dist<Sa)/number] ? ? ? ? ? ? ? ? ?(6)
式中:number(Sr<dist<Sa)表示二維平面上車間安全距離dist落于絕對安全距離Sa和相對安全距離Sr的次數,number為總次數。同時采用蒙特卡洛模擬的方法對上述p進行求解:
[Pi,j=f(Ti,Tj)={0dist>SaCLSr≤dist≤Sa1dist<Sr}] ? ? ? ? ? ? ? ? ? ? ? (7)
3.2行為預測
針對危險程度的分析以及綜合考慮(2.2)影響因素,為計算方便,借用LEC安全評估法的思想,本文確定風險程度為D ,[D=f*Pia],其中:f是路線危險程度,Pia是車輛碰撞風險程度。
由計算結果可知,D值越大,則說明風險程度越大,其基于概率分布在0-1之間,本文對風險程度進行分級,0~0.04:可接受的風險;0.04~0.16:可能的風險;0.16~0.36:中等風險;0.36~0.64:高風險;0.64~1:極高的風險。但值得注意的是,LEC風險評價法對危險等級的劃分,一定程度上憑經驗判斷,根據實際情況予以修改。
3.3智能網聯汽車狀態控制
當汽車碰撞風險處于不同的風險程度時,車載電腦可以根據實時的智能網聯汽車行為預測提出相應的警示,而對于不同程度的危險,車載電腦也會給出不同的應對策略。在可接受的風險范圍內,由車載電腦根據智能網聯汽車的碰撞行為預測自動對其狀態進行控制;相反,在超出可接受風險范圍時,車載電腦發出警報提示并對汽車的四輪轉角進行全方位的嚴密監控,同時通過對汽車碰撞行為的實時預測,不斷對汽車的四輪轉角進行操控以達到對汽車狀態的控制。
4小結
在大數據技術背景下,將碰撞行為預測、智能網聯汽車狀態控制結合起來,以實現車輛的安全駕駛,從云服務器中獲取大量萬車公里事故率、夜間事故率及人為原因事故比例等相關信息構建路面危險程度分析模型,通過車輛傳感器獲取車輛當前駕駛狀態信息,存入磁盤中進行瞬時數據檢測,并應用蒙特卡洛模型分析車輛實際行駛過程中的碰撞風險率,提前對汽車的行為進行預測,同時根據危險度標準對智能網聯汽車的狀態進行控制,進而有效降低交通事故的發生率,并減少人員傷亡及財產損失。
參考文獻:
[1] 黎宇科,劉宇.國外智能網聯汽車發展現狀及啟示[J].汽車工業研究,2016(10):30-36.
[2] 孔令錚.交通事故致因中的人為因素分析[J].中國安全科學學報,2013,23(1):28-34.
[3] 鐘茂華,劉鐵民,韋星,等.中國道路交通事故初步統計分析[C].中國國際安全生產論壇,2002.
[4] 李克強,戴一凡,李升波,等.智能網聯汽車(ICV)技術的發展現狀及趨勢[J].汽車安全與節能學報,2017,8(1):1-14.
[5] 郭道一.基于深度學習和仿真的汽車碰撞損傷預測方法[D].大連:大連理工大學,2019.
[6] 鄧婕.淺談汽車碰撞過程分析及安全設計要點[J].中國戰略新興產業,2018(44):233.
[7] 陳天德,黃炎焱,張永亮.基于碰撞危險度的無陷阱動態航路規劃[J].系統工程與電子技術,2019,41(11):2496-2506.
【通聯編輯:李雅琪】
