車聯網中基于交通流量感知的數據路由
2021-03-01 15:50:18楊梓晗
導航定位學報 2021年1期
孫 列,楊梓晗
(1.西安航空學院 飛行器學院,西安 710077;2.湖北工業大學 工業設計學院,武漢 430068)
0 引言
作為現代社會最重要的基礎設施,交通系統的效率直接影響居民生活質量。然而,隨著交通流量的增加以及道路車輛數的激增,交通事故頻繁發生[1-2]。因此,如何有效地提高道路安全,是交通系統亟待解決的問題。
車載網絡(vehicular networks, VNs)已成為智能交通系統(intelligent transportation system, ITS)的重要組成部分,能有效地緩解交通事故的發生[3]。VNs利用車輛間(vehicle-to-vehicle, V2V)的通信和車輛與基礎設施(vehicle-to-infrastructure, V2I)的通信,提高道路行駛安全。
然而,由于車輛的高速移動,以及移動方向的變化,車載網絡存在不穩定、低可靠的特性。這使得安全相關的消息可能不能及時傳遞至道路上所有車輛。因此,如何有效地將消息傳輸到車輛,成為VNs的研究熱點[4]。
由于拓撲的快速變化,傳統的基于移動自組織網絡(mobile ad hoc networks, MANETs)的路由,如鏈路狀態協議(optimized link state routing, OLSR)[5]、按需距離矢量路由(ad hoc on demand distance vector, AODV)[6]等并不能獲取好的路由性能[7]。研究人員把目光轉向地理位置路由。依據源節點和目的節點的位置信息決策路由,如文獻[8]提出的基于位置信息的車聯網路由,利用全球定位系統(global positioning system, GPS)接收機提供的行車參數信息,并利用這些信息恢復路由;文獻[9]提出基于地理位置改進的車聯網路由,根據車輛移動方向和速度,預測車輛運動軌跡,并據此軌跡選擇下一跳轉發路由,進而保證路由的可靠性;文獻[10]提出1個混合路由協議,將貪婪邊界狀態路由(greedy perimeter stateless routing, GPSR)和層次位置服務(hierarchical location service, HLS)策略相結合,通過GPSR策略傳輸數據包。當目標節點位置不確定時,就通過HLS策略獲取目標節點的位置。
此外,VNs是依據道路上的車輛轉發數據的,所以如何選擇路段傳輸數據是數據轉發的關鍵。為此,研究人員提出基于流量感知的交叉口路由和基于道路的地理位置路由。例如,文獻[11]針對3維城市道路,提出了改進的定向路由。該路由采用動態的傳輸范圍,并采用虛擬鄰居節點策略選擇可靠路由。然而,該路由并沒有給出如何調整車輛的傳輸范圍,也未能分析傳輸范圍對路由性能的影響。為此,本文提出交通流量感知的數據路由(traffic volume-aware data routing, TVDR)。TVDR路由先將道路劃分為不同的矩形格,并推導基于路段連通的概率,然后選擇連通率最高的路徑傳輸數據。
1 約束條件
TVDR路由是依據路段的連通情況傳輸數據的,并通過預測流量信息估計每個路段的路徑連通率。引入布爾變量Ci來表示路段i是否為數據源參數,如果Ci大于預定的閾值,則Ci為1;否則Ci為零。
由于高頻信號的穿透性差,假定數據包只沿著道路傳輸,另假定道路是雙向的,且每個方向至少有2個車道。只要在源節點通信范圍cR內的車輛,都可作為轉發節點,如圖1所示。同一方向車輛可以轉發數據包,反方向車輛也可轉發數據包。數據轉發示例如圖2所示。
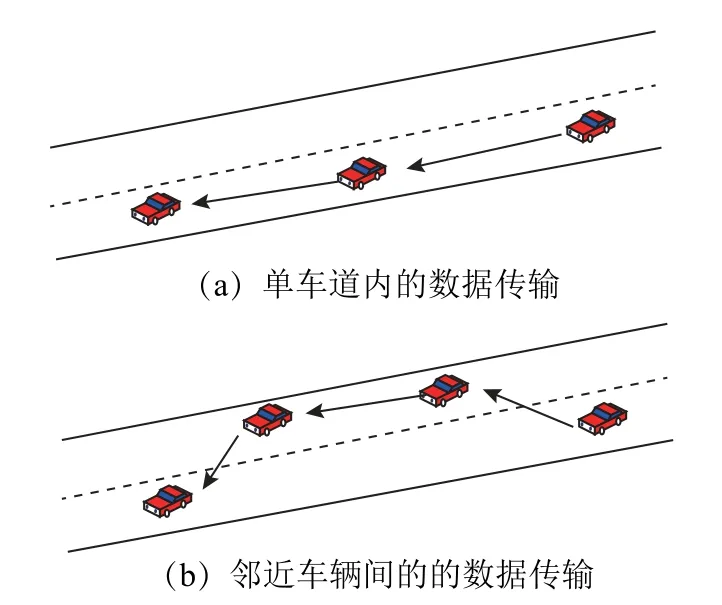
圖1 數據轉發策略

圖2 數據轉發示例
將路段照射于矩形格,每個格的長度為r=Rc/2,如圖2(a)所示。假定在矩形格內每輛車能夠與鄰近矩形格內的其他車輛直接通信。在每個方向上,1輛車至少有2條潛在的轉發鏈路。換而言之,如果在2個矩形格內沒有車輛,則表明不存在轉發數據的鏈路,如圖2(b)所示。
2 TVDR路由
TVDR路由主要路段連通率估計和貪婪數據轉發2個階段構成。
2.1 路段連通率估計
令V(i)d表示在時間段[t,t+Δt]內通過路段i、t方向d上的總的車輛數,其也稱為總流量數。Δt= 15min 。
可依式(1)計算在時間段Δt內的平均車輛數單位為每分秒車輛數,即

式中:d表示方向的布爾變量,其定義如圖3所示。
接下來,推導以下兩種情況下的路段連通情況:1)理想情況。在理想情況下,假定車輛以平均速度均勻行駛在道路上,則在路段i上平均車輛數為

因此,在每個矩形格內的平均車輛數為
式中cR為車輛的通信半徑。
當在矩形格有1輛車,車輛就能夠轉發數據。換而言之,當路段i上的方向平均車輛數大于1,則該路段是連通的,因此就能夠通過該路段轉發數據。
2)非理想情況。假定在該路段上的車輛仍以均速行駛,但車輛并不服從均勻分布,而是服從泊松分布。令為平均達到率,則有

因此,在時間段[t,t+Δt]內,路段i方向d上的平均車輛密度為

由于到達該路段上的車輛服從泊松分布,在每個矩形格內的車輛數服從式(6)所示的概率質量函數(probability mass function, PMF),即

2.2 數據轉發策略
為了抑制因數據轉發所引起的廣播風暴問題,只在路徑搜索區域內傳輸路徑發現消息。由源車輛和目的車輛的相對移動構建路徑搜索區,如圖4所示。
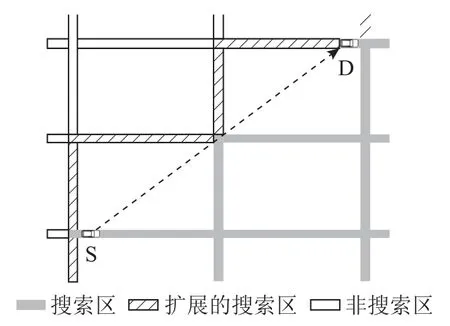
圖4 路徑搜索區域示例
具體而言,將源車輛的移動方向作為x軸,由源車輛和目的車輛的移動軌跡構建路徑搜索區域。不失一般性,路徑搜索區域越大,可選擇的路徑就越多。對路徑搜索區域進行擴展,圖4中的斜線陰影部分就是擴展后的區域。
最后,可歸納執行TVDR路由的步驟如下:
步驟1:源節點沿著路段,并在2個方向上傳輸路徑請求消息(path request, PREQ)。PREQ以HELLO消息格式為基礎,并進行修改,如圖5所示。

圖5 PREQ消息格式
PREQ消息包括源車輛的速度、目的節點身份標識號(identity, ID)以及路徑搜索區、轉發路段序列號、路段連通率。TVDR路由采用貪婪方式轉發PREQ,直到PREQ傳輸至位于每個路段交叉口的路邊單位(road side unit, RSU)。
步驟2:當RSU接收到PREQ,就進入路徑發現階段。RSU從PREQ消息中提取目的節點ID,判斷是否在自己覆蓋的范圍內。如果目的節點在自己的覆蓋范圍內,RSU就向該目的節點傳輸PREQ消息;否則,RSU就更新PREQ中路段序列號,并向下1個RSU轉發。
步驟3:目的節點在預定的等待時間Twaiting內,可能接收到多條PREQ消息。換而言之,可能存在多條從源節點至目的節點路徑。假定存在m條路徑,目的節點就從中選擇具有最高連通率的路徑傳輸數據。然后,沿著該路徑向源節點回復確認消息ACK。
3 性能分析
3.1 仿真環境
利用矩陣實驗室(matrix laboratory, MATLAB)軟件建立仿真平臺,分析TVDR路由的性能。引用曼哈頓(Manhattan)移動模型[12]產生車輛的移動軌跡數據,如圖6所示。在1 000 m×1 000 m 城市區域內部署100~1 000輛車。每個路段的長度為200 m,車輛相關的仿真參數如表1所示。Manhattan為網格場景,場景區域面積為1 km2,每次實驗獨立重復30次,取平均值作為最終的實驗數據。
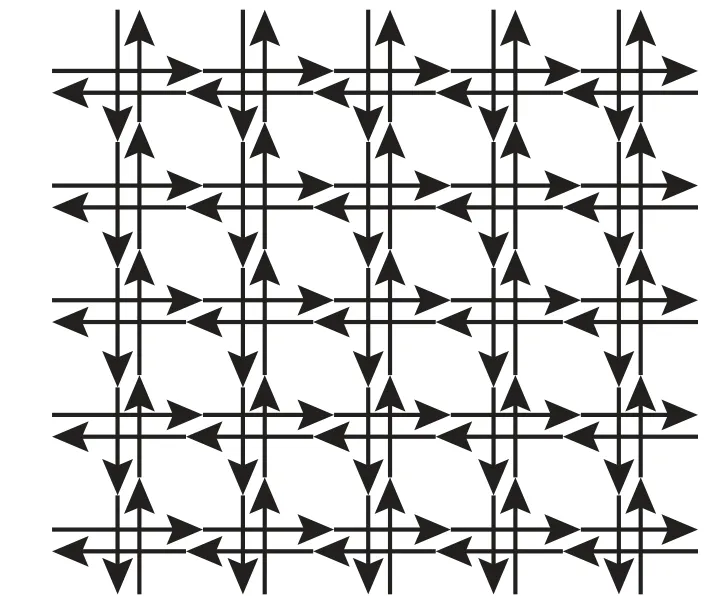
圖6 Manhattan移動模型示例
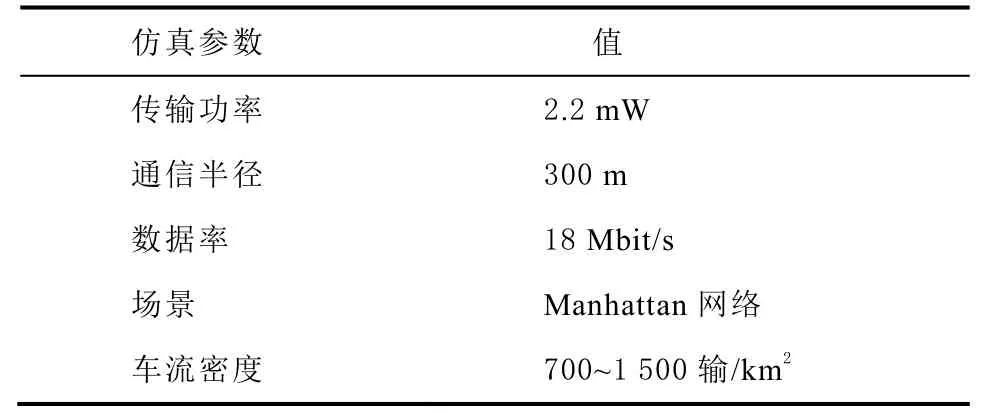
表1 仿真參數
為了更好地分析TVDR路由的性能,選擇文獻[6]的AODV路由作為參照,并對比它們的控制開銷和吞吐量性能。
3.2 吞吐量
首先分析理想情況和非理想情況下的吞吐量,分別如圖7(a)、圖7(b)所示。從圖7可知,車輛數的增加,使平均吞吐量呈上升趨勢,但當車輛增加到一定數量后,吞吐量上升緩慢。原因在于:最初車輛的增加,可大幅地提升數據傳輸量;但當車輛增加到一定量后,車輛數的增加會提高網絡的擁塞率,從而抑制了數據傳輸成功率。


圖7 吞吐量
從圖7可知,相比于AODV路由,提出的TVDR路由的吞吐量得到有效提高。這主要是因為TVDR路由利用路段連通率傳輸數據,提高了數據傳輸成功率。
3.3 系統開銷
最后,分析理想情況和非理想情況下的系統開銷。系統開銷是指每傳輸1條消息所產生的控制消息數,分別如圖8(a)、圖8(b)所示。

圖8 系統開銷
從圖8可知,在理想和非理想2種情況下,相比于AODV,TVDR路由能有效地控制系統開銷。例如,在理想情況下,當車輛數為1 000時,TVDR路由的開銷為13,而AODV路由的開銷達到約170。原因在于AODV路由采用泛洪策略傳輸控制消息。對比圖8(a)、圖8(b)不難發現,非理想情況下的TVDR路由的開銷大于理想情況。
4 結束語
本文對車載網絡的數據傳輸問題進行分析,提出交通流量感知的數據路由TVDR。TVDR路由從路段角度選擇路徑:先依據車輛的流量信息,推導路段連通率,再依據連通率選擇數據傳輸的路徑。仿真結果表明,相比于AODV路由,提出的TVDR路由可有效提高系統吞吐量,并能有效減少控制系統開銷。