磁羅經北極高緯海區航向誤差分析與補償
2021-03-02 05:32:02李偉李天偉周紅進蘭國輝王涌
船海工程 2021年1期
李偉,李天偉,周紅進,蘭國輝,王涌
(海軍大連艦艇學院 航海系,遼寧 大連 116018)
由于磁羅經的自主指向能力可以作為遠洋船舶最后的保障,國際海事組織明確要求遠洋船舶必須安裝使用。
磁羅經的指北力為地磁場水平分力,在磁赤道處最強,隨著緯度的增加而逐漸減弱,到達磁南北極處為零。因此,艦船航行到高緯度海區時磁羅經指向能力變弱,準確性較差[1]。關于不同工作條件下磁羅經的指向誤差,已有學者通過指向誤差的測試分析和誤差補償等研究工作,提出提高磁羅經指向精度的方法[2-5]。但這些研究都集中于中低緯度磁羅經的指向誤差分析與補償,難以依托分析獲取有效調整高緯海區磁羅經指向誤差的模型參數。為此,考慮基于船舶在北極東北航道實測磁羅經指向數據,與同步采集的高精度GPS光纖羅經指向數據進行比對,開展磁羅經指向誤差分析,并運用最小二乘法數據擬合系數對誤差進行補償修正,以期提高艦船磁羅經在北極高緯海區的指向精度和適用性。
1 磁羅經指向誤差
1.1 磁差特性
地理北極N與地磁北極NM的不重合產生磁差Var,磁北偏東磁差為正,偏西磁差為負,見圖1。
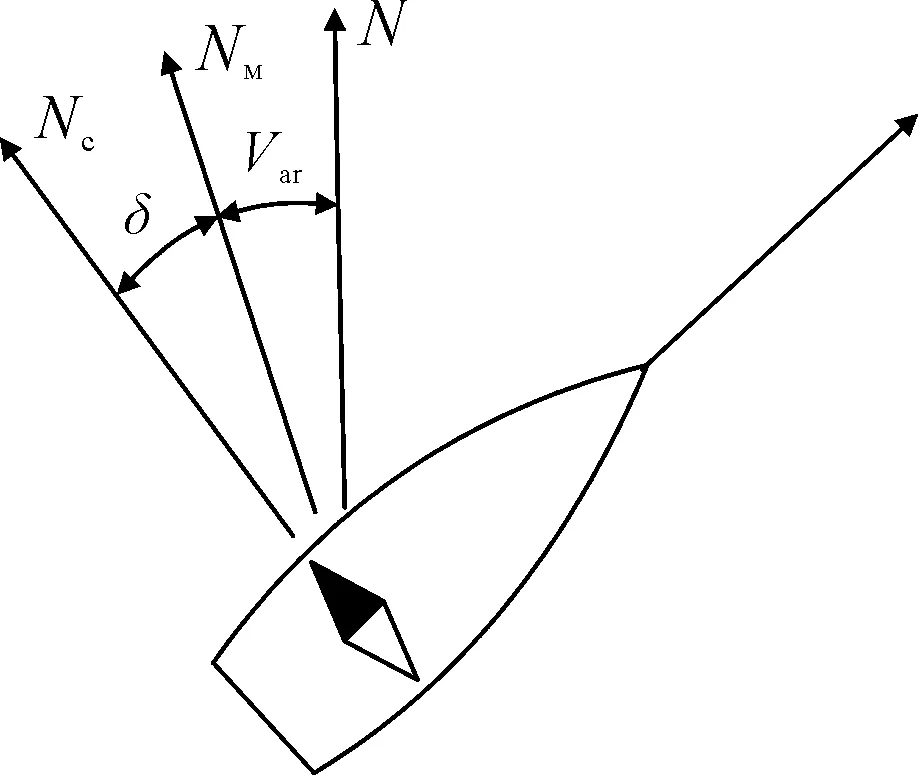
圖1 磁差與自差
由于磁羅經只能指示磁北方向,因此在實際使用時要進行磁差修正。磁差因時因地而異,各地磁差值及其年變化量,在海圖上都有標注。在北極高緯地區磁差尤其明顯,東北航道維利基茨基海峽附近達到15°E~37°E,同時極區的地磁異常也會對磁羅經指北產生較大干擾,發生嚴重磁暴時磁羅經指向誤差能達到幾十度。雖然磁差在北極高緯海區明顯增大,但只要能夠準確測定磁差,即可獲取磁羅經指向改正量,消除該部分誤差。
1.2 自差特性
磁羅經受地磁力作用的同時,還受所裝載艦船自身鋼鐵磁性的影響,使磁羅經指向偏離磁北方向,從而產生指向誤差。磁羅經實際指示的方向稱為羅經北Nc,羅經北Nc與磁北NM之間的差值極為羅經自差δ,也可用Dev表示,見圖1。羅經北偏東自差為正,偏西為負。
羅經自差是磁航向MC的連續的周期性函數,可用下列公式表示。
δ=A+BsinMC+CcosMC+Dsin2MC+Ecos2MC
(1)
式中:A、B、C、D、E為自差系數,具體艦鐵產生的自差見表1。
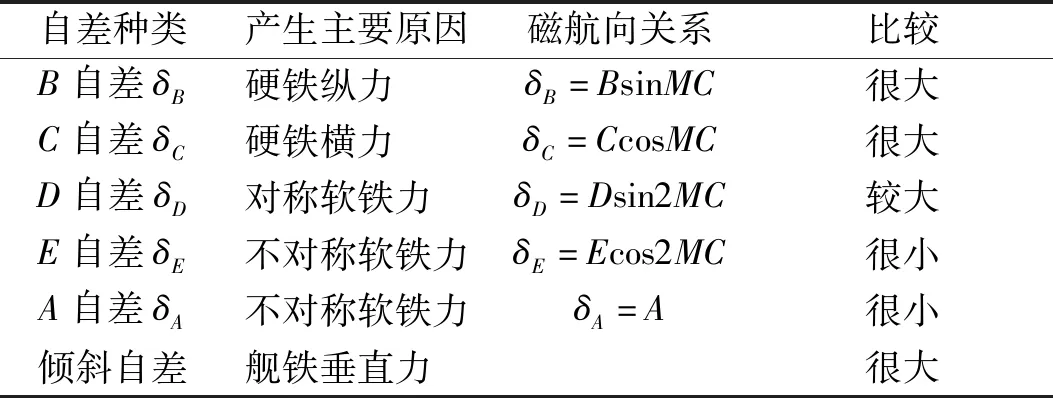
表1 艦鐵產生的自差
2 磁羅經高緯海區誤差測試
2.1 測試基準
光纖羅經使用沒有轉子部件的光纖陀螺,利用光的干涉原理來測量載體平臺的運動角速度,通過加速計測量載體平臺的運動加速度,在此基礎上解算出載體平臺的方向和姿態[6]。相比傳統陀螺羅經,光纖羅經具有穩定時間短、避免產生沖擊誤差、快速轉向誤差小、消除了搖擺誤差、工作地理范圍大,以及維護成本低等有點,不僅提供航向信息,還提供橫搖、縱搖姿態信息。由于沒有轉動部件,不需要換陀螺球,使用壽命長,通過算法解算可以在高緯度地區航行使用。
GPS羅經采用2個高精度GPS接收機作為衛星信號傳感器,從接受到的衛星電波信息中提取出衛星的位置參數、偽距、相位參數等,通過一系列導航算法解算出船舶的船首向信息[7]。GPS羅經具有小型化、精度高、穩定性好,以及成本低等優勢。
GPS羅經和光纖羅經不受地磁場和艦船自身結構影響,在北極高緯地區工作均具有良好的指北能力和工作穩定性。GPS光纖羅經是GPS羅經和光纖羅經的結合體,共同作用進而提高指向精度,克服GPS和光纖羅經各自的缺點,達到優勢互補的目的。
文中磁羅經高緯海區指向樣本數據利用同步采集的GPS光纖羅經指向數據作為測試基準。所選用的GPS光纖羅經基準設備配備于北極商業航行船舶所使用的,在緯度低于85°的區域,有穩定衛星信號時指向精度高于0.1°,在GPS衛星信號丟失的30 min以內指向精度不低于0.5°[8]。所使用的羅經樣本數據在進行采集時GPS光纖羅經均有穩定的衛星信號。
2.2 測試樣本數據獲取
為準確獲取高緯海區磁羅經指向誤差特性,測試時采用實船采集艦船在規定航向穩定后磁羅經工作時指向樣本數據,并同步采集GPS光纖羅經指向數據作為測試基準,計算羅經自差δ。
δ=GC+ΔG-Var-CC
(2)
式中:GC為GPS光纖羅經航向;CC為磁羅經航向;ΔG為GPS光纖羅經差,Var為磁羅經磁差。
GPS光纖羅經在有衛星信號時指向精度不低于0.1°,按照國際海事組織規定,磁羅經自差不超過5°即滿足使用要求,因此本文在分析時將GPS光纖羅經的羅經差忽略不計。
樣本數據采集范圍涵蓋自白令海峽穿越北極東北航道到達歐洲,最高到達緯度77°47′N。樣本數據集時間跨度為20 d,區域跨度涵蓋60°N~77.8°N近18個緯度范圍區間,測試船舶航速保持在14 kn左右,采樣間隔設定為1 h。
考慮到數據采樣船舶裝載的物件為鋼制架構,整體載重超過2萬t,裝載后和卸貨后艦鐵磁力改變較大,對磁羅經指向誤差產生較大影響。因此,對于2種工作條件下的樣本數據均予以采樣。
2.3 磁羅經指向誤差曲線擬合
選用平滑的曲線y=f(x)來近似測試樣本,映射出給定測試數據的一般性趨勢[9]。
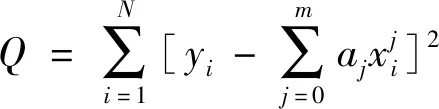
k=0,1,2,…,m
(3)
可得
(4)
得到關于系數aj的線性方程組且只有唯一解,求解aj,確定擬合函數。
3 結果與討論
3.1 指向穩定性分析
艦船磁羅經在不同的裝載狀態,自身艦鐵磁力不一樣。因此,對于磁羅經在高緯海區的指向穩定性,需區分船舶裝載條件和空載條件。按照保持緯度升降趨勢不變的原則,選取4組磁羅經樣本數據和光纖羅經基準數據對比分別見圖2。其中,圖2a)和圖2b)為裝載條件下磁羅經指向數據,圖2c)和圖2d)為空載條件下磁羅經指向數據。
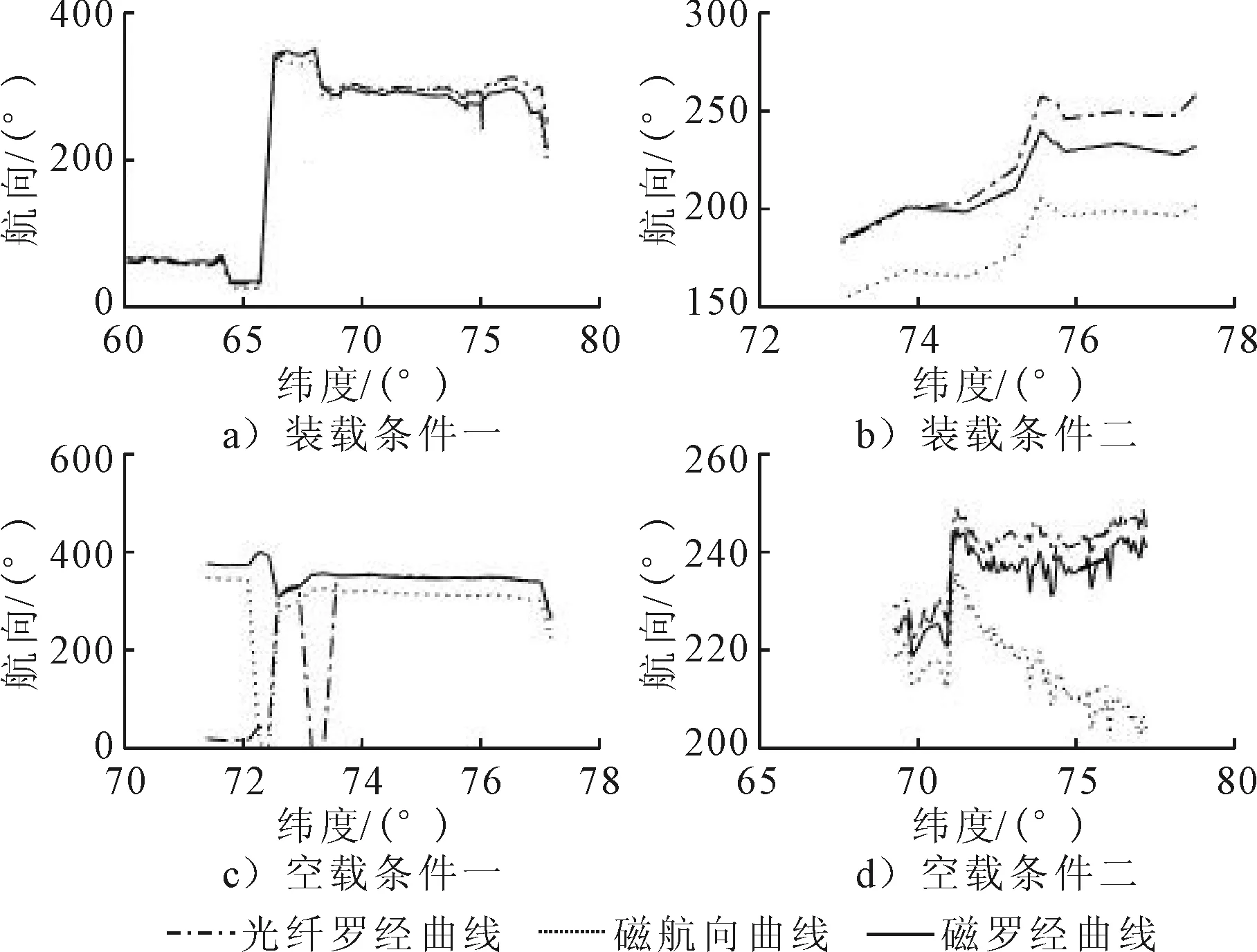
圖2 不同裝載條件下磁羅經樣本數據與光纖羅經基準數據對比
由圖2可知,在78°N以下區域,不考慮磁暴等因素影響,雖然磁差隨著緯度升高逐漸增大,在75°N以上區域當地磁差甚至接近40°,但磁羅經指向數據與GPS光纖羅經的指向數據同步變化趨勢穩定,驗證了磁羅經在磁差準確測定的前提下區間段范圍內的指向穩定性;同時,通過比對4組樣本數據,驗證了磁羅經在高緯海區同一緯度不同航向不同位置條件下能保持一定的指向穩定性。
3.2 自差變化曲線
根據式(2)計算磁羅經不同地點不同航向自差,圖3a)和圖3b)為裝載條件下磁羅經自差變化曲線,圖3c)和圖3d)為空載條件下磁羅經自差變化曲線。
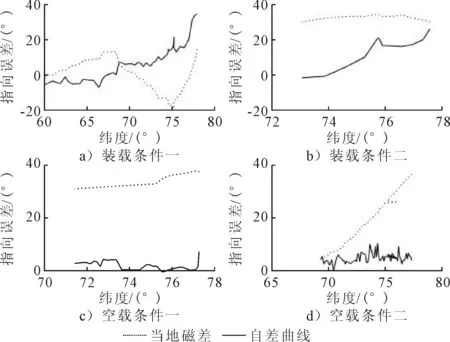
圖3 不同裝載條件下磁羅經自差的變化
在裝載條件下,磁羅經的自差隨著緯度增高,自差增大明顯,在75°N以上海區自差甚至超過30°,但不同時間、不同地點誤差變化趨勢具有一定的相似性。在空載條件下,磁羅經自差變化呈震蕩變化,震蕩幅值不超過10°。由于船舶消測磁羅經自差一般空載條件下進行,也驗證了磁羅經在進行準確消測后,高緯海區自差亦呈現一定的穩定性。
3.3 誤差補償分析
為便于數據分析,將數據組分為三組,保證每組數據在同一緯度數據的唯一性和連貫性。從滿足實際使用需求的角度出發,選取三次多項式進行擬合。圖4a)和圖4b)為裝載條件下磁羅經誤差補償及殘差曲線,圖4c)和圖4d)為空載條件下磁羅經誤差補償及殘差曲線。數據曲線擬合多項式參數見表2,誤差補償后的殘差大小范圍及相對于原始測試樣本的相對誤差見表3。
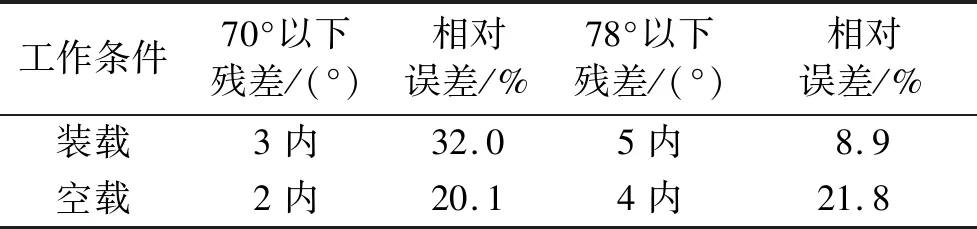
表3 磁-光纖羅經誤差擬合結果分析

表2 磁-光纖羅經誤差擬合參數
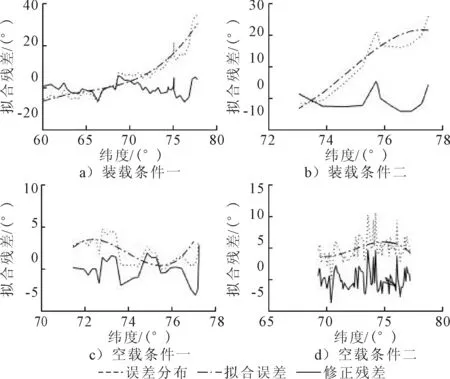
圖4 不同條件下磁羅經誤差補償及殘差對比
由圖4可見,在裝載和空載的不同工作條件下,經過誤差補償后都能夠明顯降低磁羅經自差,修正后的殘差不超過5°,滿足磁羅經航海指向要求。通過實驗表明,磁-光纖羅經誤差數據曲線擬合建立的補償模型,能夠顯著降低磁羅經指向誤差,驗證了方法的有效性。
4 結論
通過對磁羅經在高緯海區工作的指向效應分析,驗證了磁羅經在磁差準確測定的前提下區間段范圍內的指向穩定性。經過誤差補償,在裝載和空載的不同工作條件下都能夠明顯降低磁羅經自差,修正后的殘差不超過5°,滿足磁羅經航海指向要求。但也要注意,轉載條件和空載條件下磁羅經指向誤差隨緯度升高變化趨勢具有較大的差異性,空載條件下指向誤差變化相對較小。因此,為減小磁羅經裝載條件下指向誤差尤其是在高緯海區的指向誤差,可在艦船完成裝載后重新進行磁羅經自差消測,減小高緯海區的誤差變化量。
