混合勵磁電機的電動汽車增程器控制策略
2021-03-02 10:19:28姚棟偉呂成磊沈俊昊
上海交通大學學報 2021年2期
關鍵詞:發動機
侯 玨, 姚棟偉, 吳 鋒, 呂成磊, 王 涵, 沈俊昊
(浙江大學 動力機械及車輛工程研究所, 杭州 310027)
以插電串聯為特征的增程式電動汽車是目前電池技術突破之前由傳統燃油車向純電動汽車過渡的最理想車型[1].在眾多車載增程器構型[2-5]中,內燃發電型增程器因技術相對成熟、結構緊湊和成本較低而被廣泛應用.發電機大多采用永磁同步電機[6-8],也有少數采用三相無刷交流同步電機[9]及其他電機[10].電勵磁電機因磁動勢感應系數較低而效率不高,難以應用于功率需求較大的場合[11];永磁同步電機發電需借助脈沖寬度調制(PWM)全橋/半橋整流等技術,控制難度和成本較高.混合勵磁電機最早由McCarty[12]提出,它綜合了兩者的優點,高效緊湊,特別適合對輸出電壓/功率的穩定性要求較高的場合;通過引入勵磁電流對輸出電壓進行控制,控制邏輯更簡單,控制成本更低,并且利于驅動系統的解耦控制和效率優化[13],在增程式電動汽車領域具有重要的應用前景.
一方面,增程器控制的最終目標是快速響應目標發電功率,并提高燃油經濟性、降低排放;另一方面,沿著最優曲線進行功率跟隨的增程器有利于小型化[14],因此增程器控制策略需要解決增程器發動機與發電機之間的強耦合問題,降低發動機轉速調整頻率,將增程器的穩態及瞬態工況點限制在設定的高效低排工作區域內.申永鵬等[6]提出了一種基于發動機制動比油耗(BSFC)曲線的發動機轉速切換-整流器功率跟隨的增程器協調控制策略.胡明寅等[15]設計了發動機轉速和發電機電流的雙閉環控制策略.Zhang等[16]利用比例-積分-微分(PID)算法和模糊控制器來保證發動機轉速在發電機轉矩變化時保持穩定.后續該團隊對發動機和發電機進行協調控制,并進行了試驗驗證[17].現有研究在一定程度上完成了增程器的解耦協調控制[18],但較少考慮到發動機轉速控制慢于電機功率/轉矩調節,這會導致工況點實際遷移路徑偏離設定的最優曲線.并且多數基于永磁同步電機的實現較大程度上依賴于其控制精度、控制系統復雜度和成本,針對混合勵磁增程器動態控制的相關研究目前還未見報導.
本文利用混合勵磁電機氣隙磁場的平滑調整特性,提出一種基于混合勵磁電機的新型電動汽車增程器.針對混合勵磁增程器動態協調控制問題,制定了基于增程器整體效率特性的多轉速點工作區域,設計了圍繞工作區域的增程器轉速-功率解耦的雙閉環控制算法,并利用MATLAB/Simulink開發平臺進行了算法實現,最后基于自行開發的混合勵磁增程器原理樣機進行了試驗驗證.
1 系統結構與原理
混合勵磁增程器的控制系統拓撲結構如圖1所示,增程器主體由混合勵磁發電機與發動機通過錐軸剛性連接形成,發動機選用一款V型雙缸全電控發動機,發電機選用一款混合勵磁電機,詳細參數見表1和表2.采用基于控制器局域網(CAN)總線的分層式網絡控制結構,增程器控制器(RCU)與整車控制器(VCU)通過整車層CAN網絡進行信息交互,與發動機控制器(ECU)通過內部CAN與進行通訊.增程器不直接參與驅動,而是在整車動力電池電量不足時發電以提供額外電量,延長續駛里程,避免電池過放電.
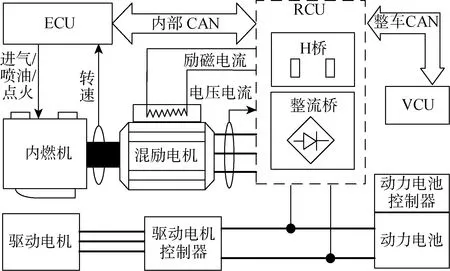
圖1 混合勵磁增程器控制系統拓撲結構圖Fig.1 Topology of hybrid excitation range-extender control system
RCU接收VCU的控制指令,經內部控制算法對發動機和混合勵磁發電機進行協調控制,完成增程器的按需啟停和發電功率調整,并將當前工作狀態信息反饋給VCU.RCU集成混合勵磁發電機控制器功能,通過采集母線電壓與電流、電機勵磁電流等信號,對混合勵磁電機進行勵磁電流調整,實現增程器發電功率閉環控制.ECU接收RCU的發動機啟停命令和目標轉速命令,進行轉速閉環控制,并反饋實際轉速和發動機工作狀態.發電狀態下,發動機帶動混合勵磁發電機發電,產生的三相交流電經不控整流橋與整車直流母線相連,所發的電能可為驅動電機供電或給動力電池充電.
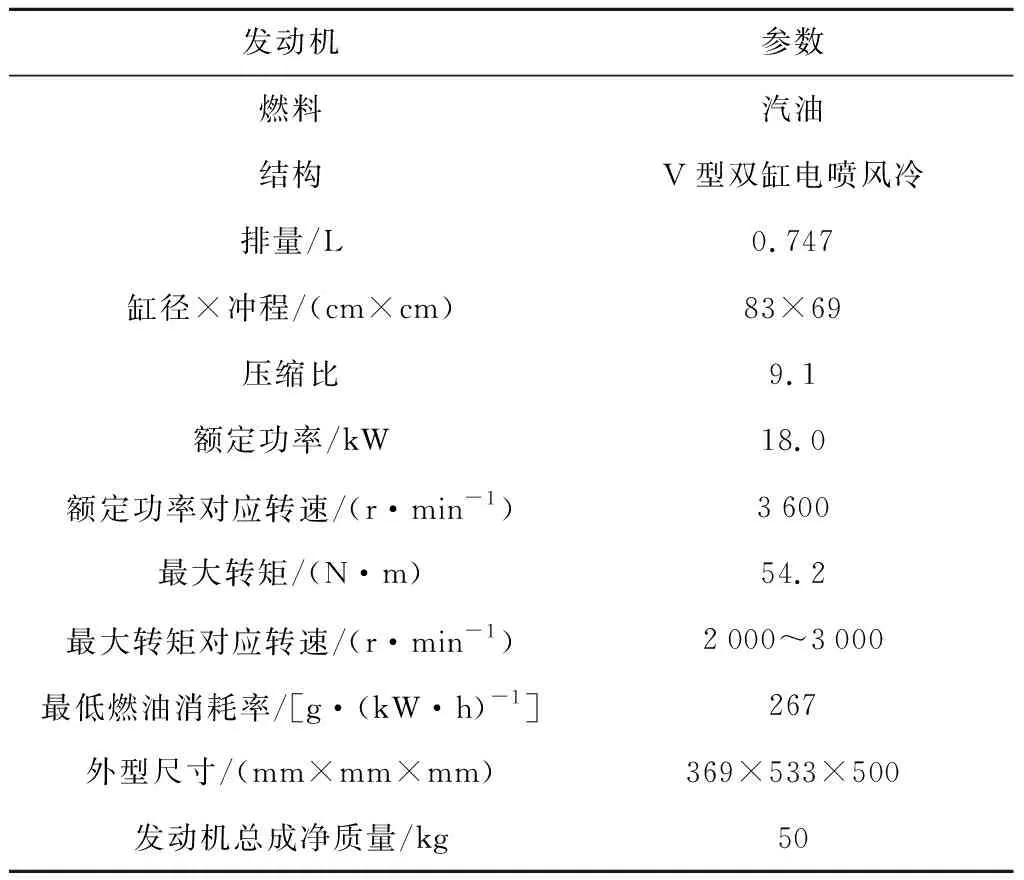
表1 發動機參數Tab. 1 Parameters of engine
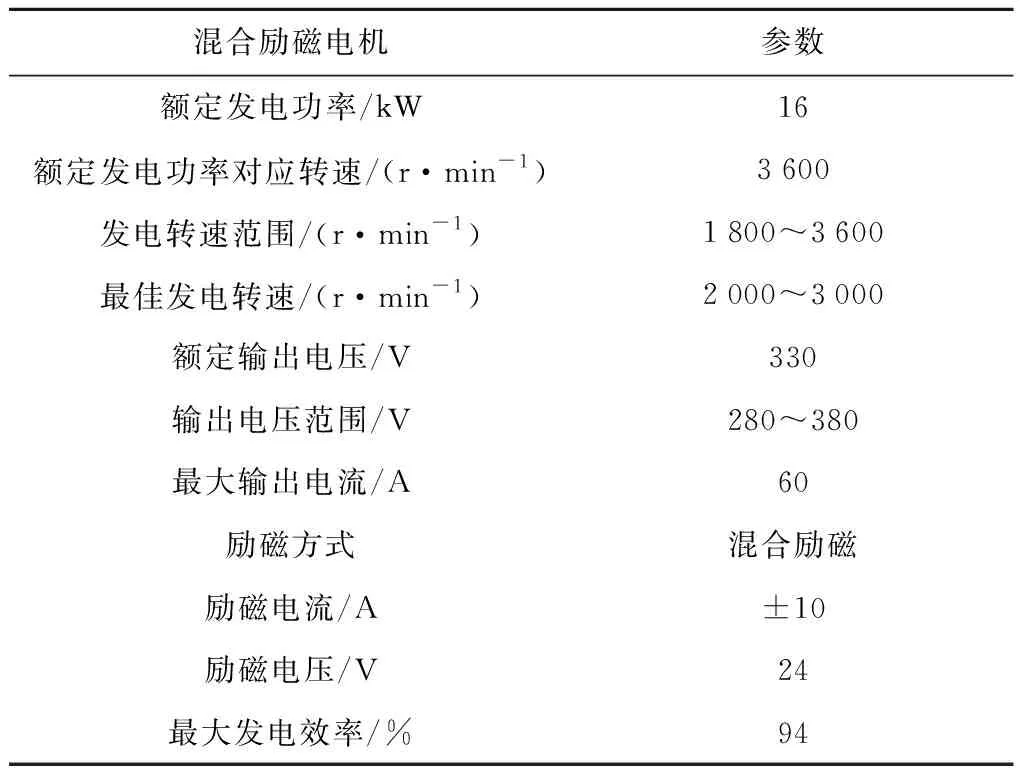
表2 混合勵磁電機參數Tab. 2 Parameters of hybrid excitation generator
2 控制策略設計
2.1 多轉速點功率跟隨策略
基于混合勵磁增程器整體燃油消耗率萬有特性曲線,設計增程器多轉速點工作區間,如圖2所示.為保證增程器在發電過程中的燃油經濟性,兼顧動力電池壽命和運行振動噪聲問題,實際發電工況區域限定增程器發電功率區間為4~16 kW,發電轉速區間為1 800~3 600 r/min,增程器在整個限定發電功率區間內實現對目標發電功率的跟隨.
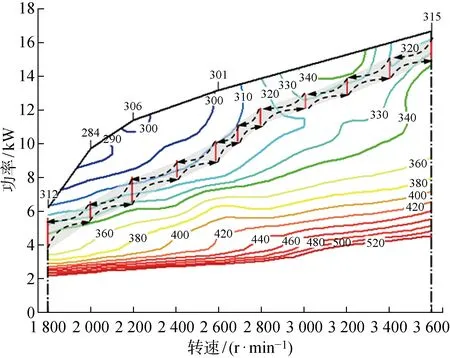
圖2 增程器多轉速點工作區間Fig.2 Multi-speed point operating regions of range-extender
為減少增程器轉速頻繁調整對油耗和排放產生的不利影響[6],設計了多轉速點功率跟隨策略,將限定發電功率區間分為若干個發電功率子區間.發電功率子區間的確定一方面要保證較低的增程器整體燃油消耗率,另一方面,需要遠離增程器外特性曲線以免運行不穩定.最終根據混合勵磁增程器整體效率特性確定了功率子區間-轉速對應關系,如表3和圖2中紅色線段所示.
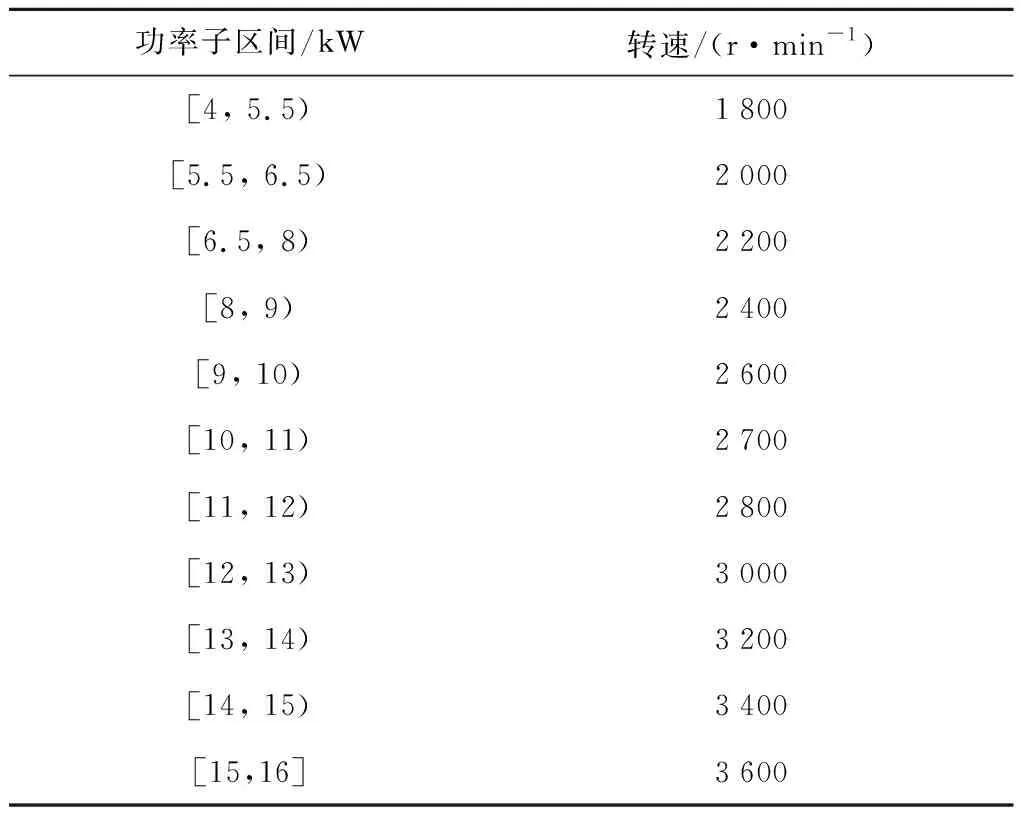
表3 功率子區間-轉速對應關系
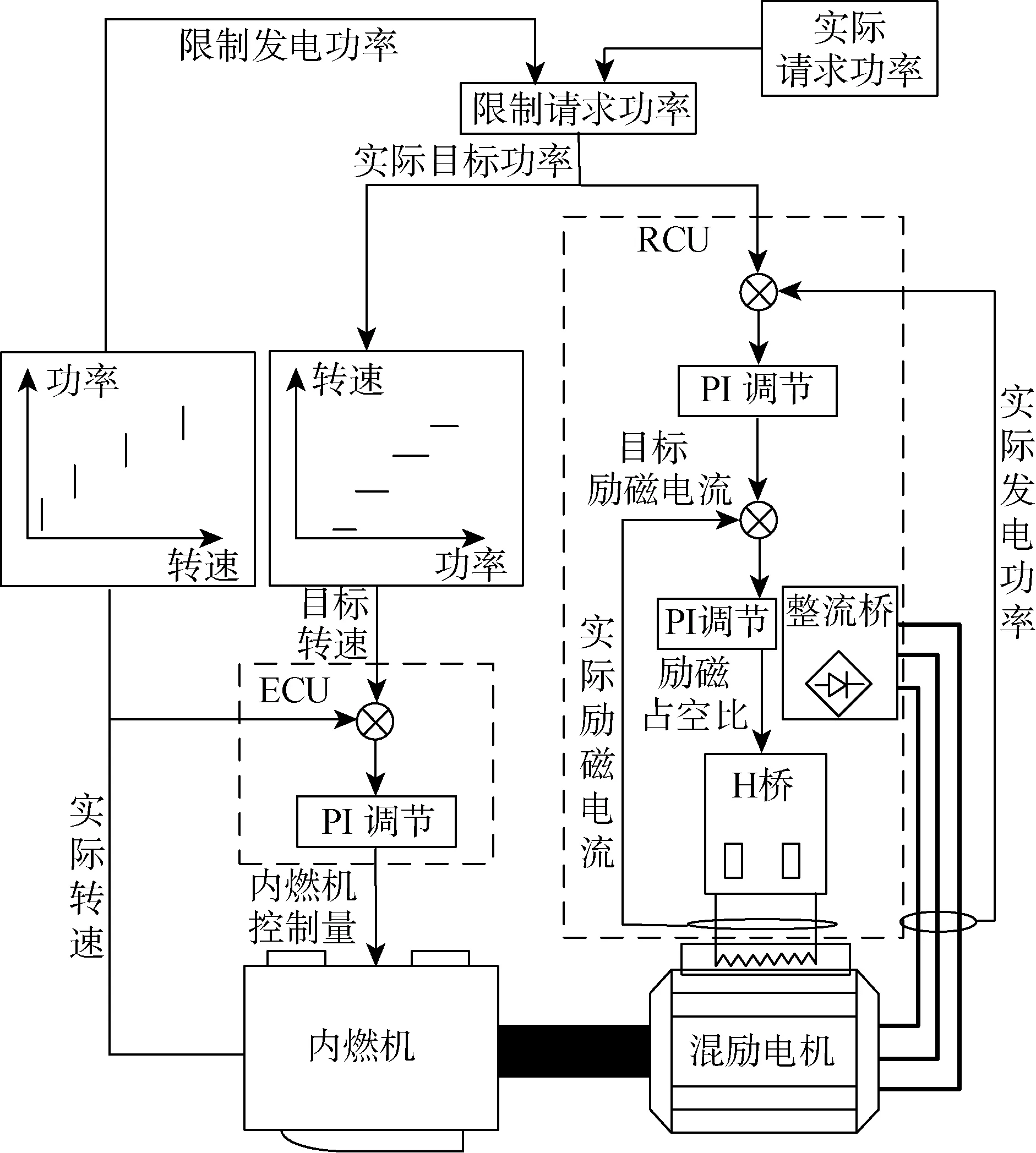
圖3 混合勵磁增程器轉速-功率解耦控制算法Fig.3 Speed-power decoupling control algorithm for hybrid excitation range-extender
2.2 轉速-功率解耦控制算法
在多轉速點功率跟隨策略的基礎上,設計如圖3所示的混合勵磁增程器轉速-功率解耦控制算法,RCU根據實際目標發電功率查功率子區間-轉速對應關系得到目標轉速,再由發動機ECU與RCU獨立完成轉速閉環控制和發電功率閉環控制,實現解耦后對發電目標功率的跟隨.
在實際增程器控制試驗中發現,發電機對目標功率的響應速度快于發動機對轉速的響應速度,當目標功率變化較大時容易造成系統瞬態遷移工況偏離設定的工作區域,因此考慮對實際請求功率進行限制.利用實際轉速查找轉速-功率子區間對應關系,得到當前轉速下允許的發電功率來限制實際目標功率,將增程器實際工況遷移路徑限制在圍繞功率區間的多轉速點工作區域內,對應圖2中的灰色陰影區.
當目標功率在功率子區間內部變化時,增程器轉速不變,工況點局限在功率子區間內;當目標功率在不同的功率子區間之間切換時,由于當前轉速映射到不同的功率子區間,增程器實際運行工況點在控制策略的限制下沿著虛線呈階梯狀上升和下降,避免其偏離設定的工作區域.
2.3 功率-勵磁電流串級系統PI控制
為實現混合勵磁增程器發電功率閉環控制,利用混合勵磁電機輸出電壓單端口可控的特性,引入勵磁電流這一中間控制變量,設計了基于串級系統的混合勵磁增程器功率-勵磁電流雙閉環控制策略,如圖3中的虛線框以內部分.通過勵磁電流調節勵磁占空比這一最終控制變量,改變氣隙磁場分布與強度,進而改變電勵磁部分的感應電勢,實現混合勵磁電機的輸出控制.
串級控制系統的外部閉環用于快速消除動態干擾,內部閉環用于調節輸出效果,從而使系統的響應加快,改善了動態性能.混合勵磁增程器系統對輸出精度和動態響應特性都有較高的要求,因此基于PI控制器的雙閉環控制方法非常適用.
3 試驗驗證
3.1 試驗臺架
利用MATLAB/Simulink搭建了混合勵磁增程器整體控制策略模型,經測試之后自動生成應用層的嵌入式C代碼,與底層手寫代碼聯合編譯之后下載到RCU硬件中,并基于混合勵磁增程器臺架進行驗證.圖4給出了增程器測試臺架的拓撲圖,包括混合勵磁增程器、RCU、負載箱、油箱、CAN通信設備及監控調試上位機.CAN通信分析設備采用德國Vector的CANoe VN1630A,搭建上位機面板模擬整車控制器的功能,對增程器控制器發出模擬控制指令,并實時監控/記錄增程器的運行狀態.負載箱采用電阻負載箱,用于消耗增程器發出的電能.
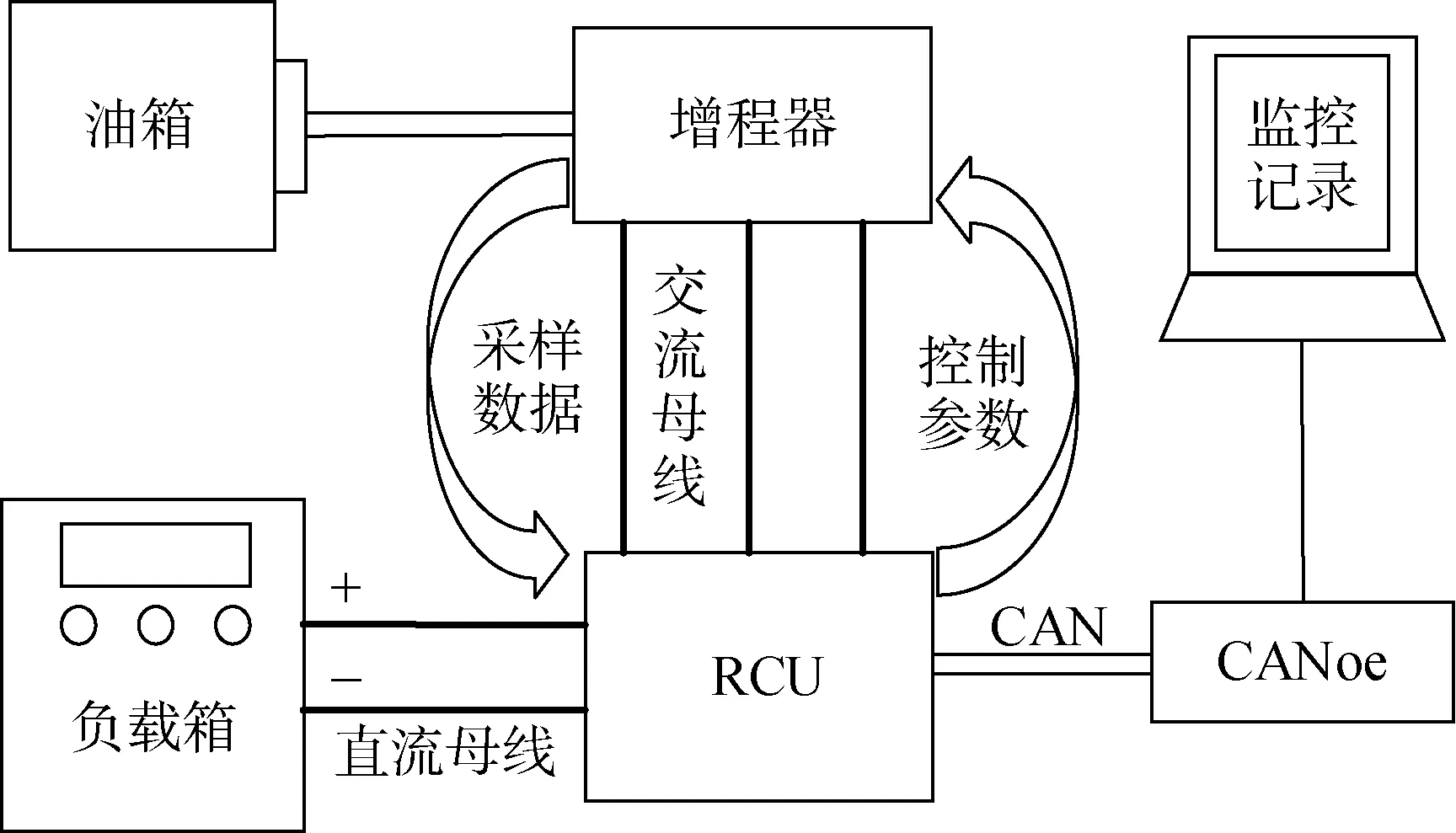
圖4 增程器測試臺架Fig.4 Testing bench for range-extender
3.2 試驗結果
串級控制系統的控制效果如圖5所示,將其與單閉環控制系統進行對比驗證.發電功率從2 kW上升至3 kW,單閉環控制系統需要33 s,而雙閉環僅需9 s.選取穩定發電功率為2 kW的工況,連續采集了85 s的數據.由試驗數據分析可得,串級控制系統的發電功率標準差為0.029 kW,單閉環控制系統的標準差為0.061 kW.由此可見功率-勵磁電流雙閉環控制策略可有效加快響應速率,減小發電功率波動.
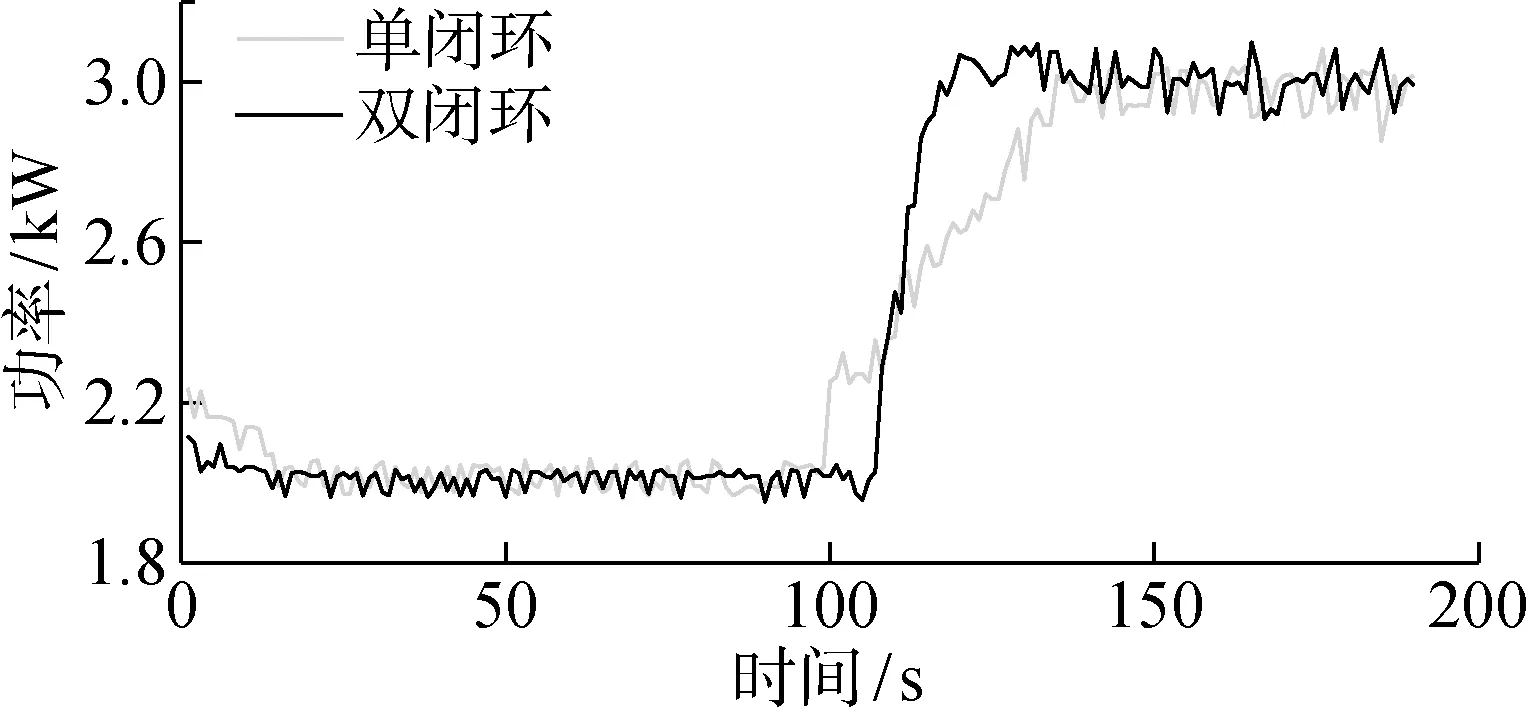
圖5 串級控制系統控制效果Fig.5 Control effect of cascade control system
利用上位機進行增程器功率跟隨試驗,目標功率按照0-5-10-15-10-5-0 kW的順序給定,待實際功率到達目標功率并穩定之后,再改變目標功率.目標功率調整過程中,始終控制負載箱負載功率大小至發電功率附近.記錄增程器實際功率、目標功率、實際轉速、目標轉速、輸出電壓、輸出電流、勵磁電流以及勵磁占空比隨時間變化的數據.
將圖6與圖7聯合分析可知,當目標發電功率變化時,目標轉速根據設定的功率子區間-轉速對應關系進行切換,表明文中設計的多轉速點功率跟隨策略切實可行.實際發電功率可較快響應目標發電功率,且響應速度與發動機轉速響應速度相關,驗證了轉速-功率解耦控制算法.
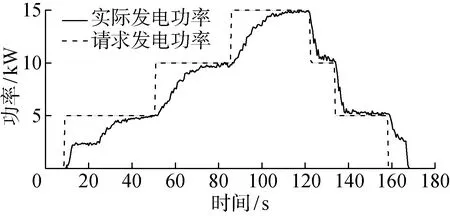
圖6 功率跟隨特性Fig.6 Power following characteristics
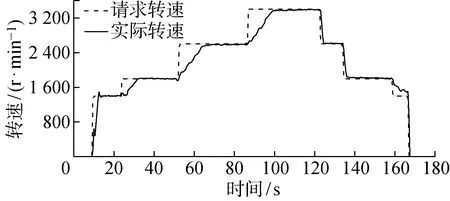
圖7 轉速響應特性Fig.7 Speed response characteristics
分別選取5 kW、10 kW、15 kW發電功率目標條件下,增程器達到穩態的200個連續的數據采集點,進行混合勵磁增程器動態協調控制策略的穩態特性分析.試驗數據表明,轉速的平均穩態誤差為14 r/min,輸出功率的平均穩態誤差為0.18 kW.但是在實際功率下降過程中,實際發電功率并不能完全達到目標功率值,穩態誤差約為0.43 kW.由圖6增程器實際的動態功率跟隨特性數據可知,目標功率上升過程中,由于存在怠速工況,所以不考慮初始啟動過程5 kW目標功率時的響應時間,目標功率由5 kW切換到10 kW的上升時間大約為9.5 s,10 kW到14 kW上升時間大約需要10.5 s.
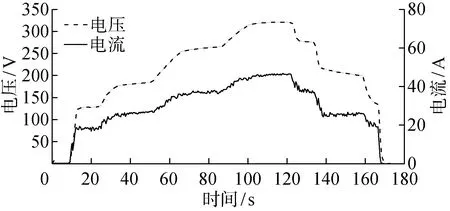
圖8 增程器輸出電壓與電流特性Fig.8 Output voltage and current characteristics of range-extender
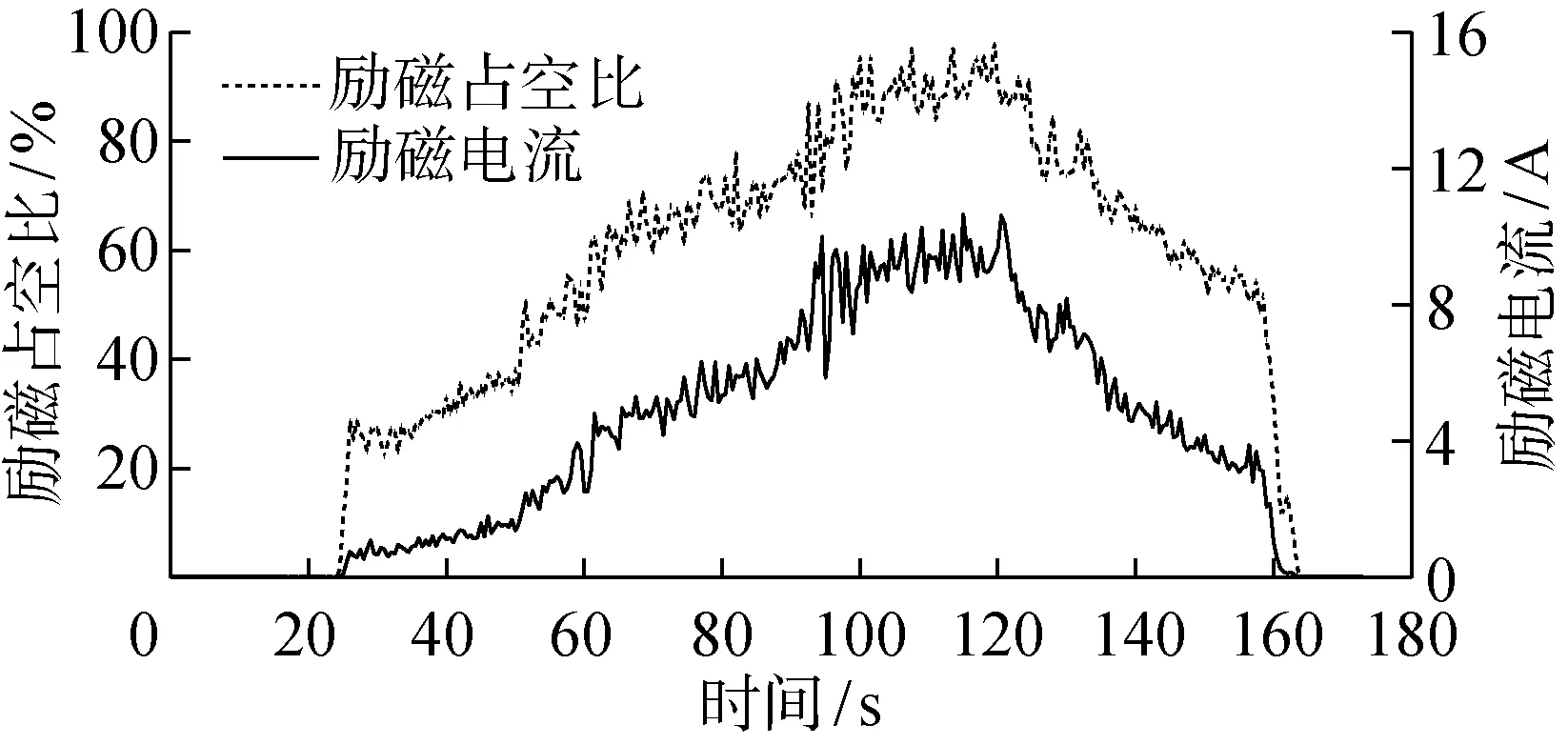
圖9 串級閉環系統中間控制變量變化特性Fig.9 Variation characteristics of intermediate control variables in cascade closed-loop systems
由圖8和圖9中的數據分析可知,整個功率跟隨試驗過程中,混合勵磁增程器的輸出電壓和輸出電流穩定.勵磁電流作為功率-勵磁電流串級PI控制系統中外部閉環的控制量,在目標功率突變時快速大幅調整以消除動態干擾,實現快速響應;勵磁占空比作為內部閉環的控制量,進行小幅調整以快速穩定增程器輸出.
為了更加清楚地分析瞬態遷移過程增程器工況點的遷移路徑,將目標功率上升過程與下降過程的數據整理成轉速-功率對應關系,如圖10和圖11中藍色“+”和“×”所示.可以看出,當目標功率需要增程器在不同轉速-功率子區間遷移時,增程器實際的工況點遷移路徑基本圍繞多轉速點工作區域,功率調節與轉速調節的速率匹配良好,實現了轉速與功率的動態協調控制.由工況點密集程度分析,功率跟隨過程增程器大部分工況點都落在設定的轉速-功率子區間上,避免了發動機轉速頻繁切換,提高了燃油經濟性.對比圖10和圖11可知,目標功率下降過程,轉速下降速率加快,一方面,記錄的數據點減少;另一方面,導致功率閉環調節波動變大.因此相比于功率下降過程,功率上升過程的工況點遷移軌跡更貼近于設置的多轉速點工作區域.
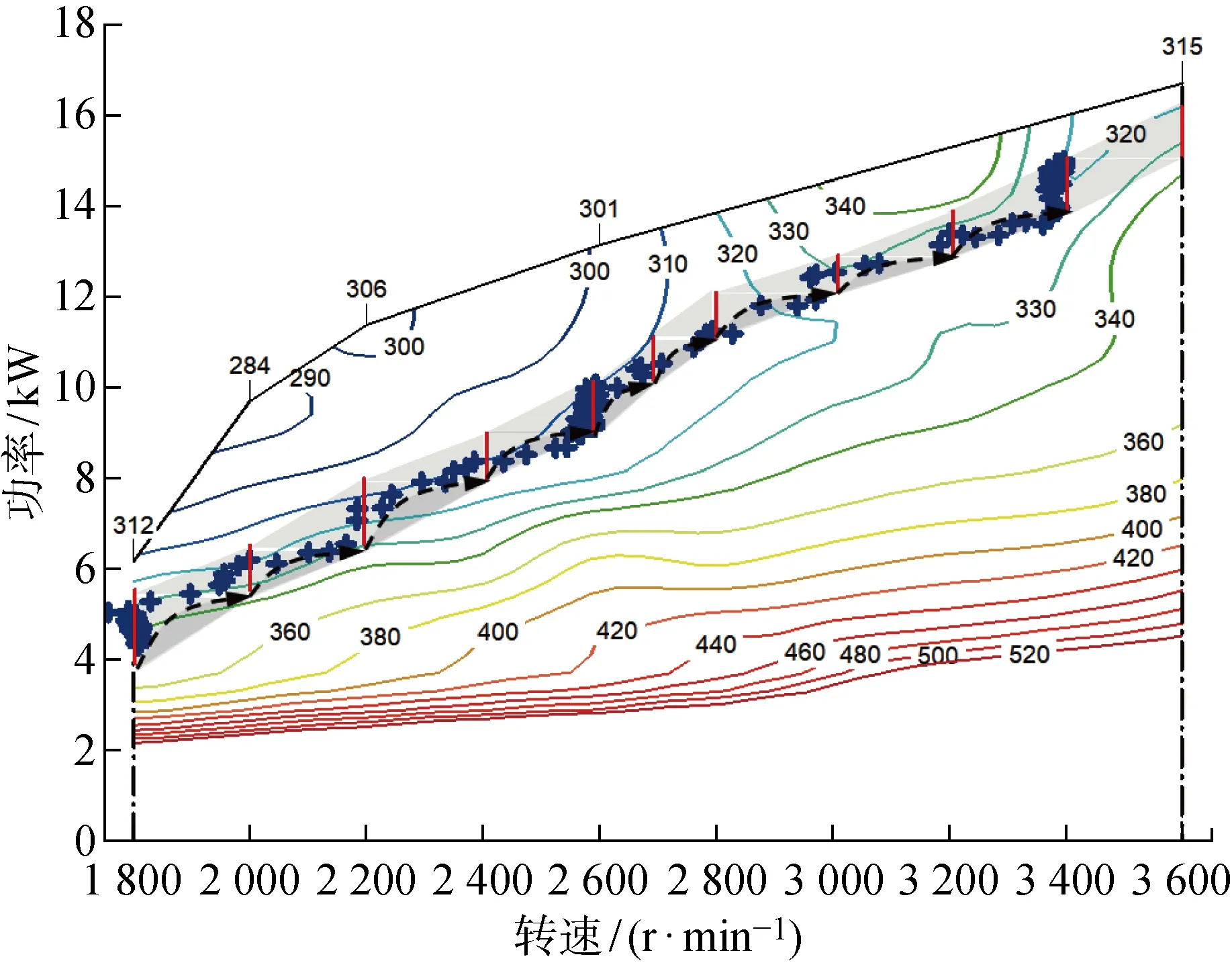
圖10 目標功率上升過程增程器工況點分布Fig.10 Distribution of range-extender operating points in target power rising process
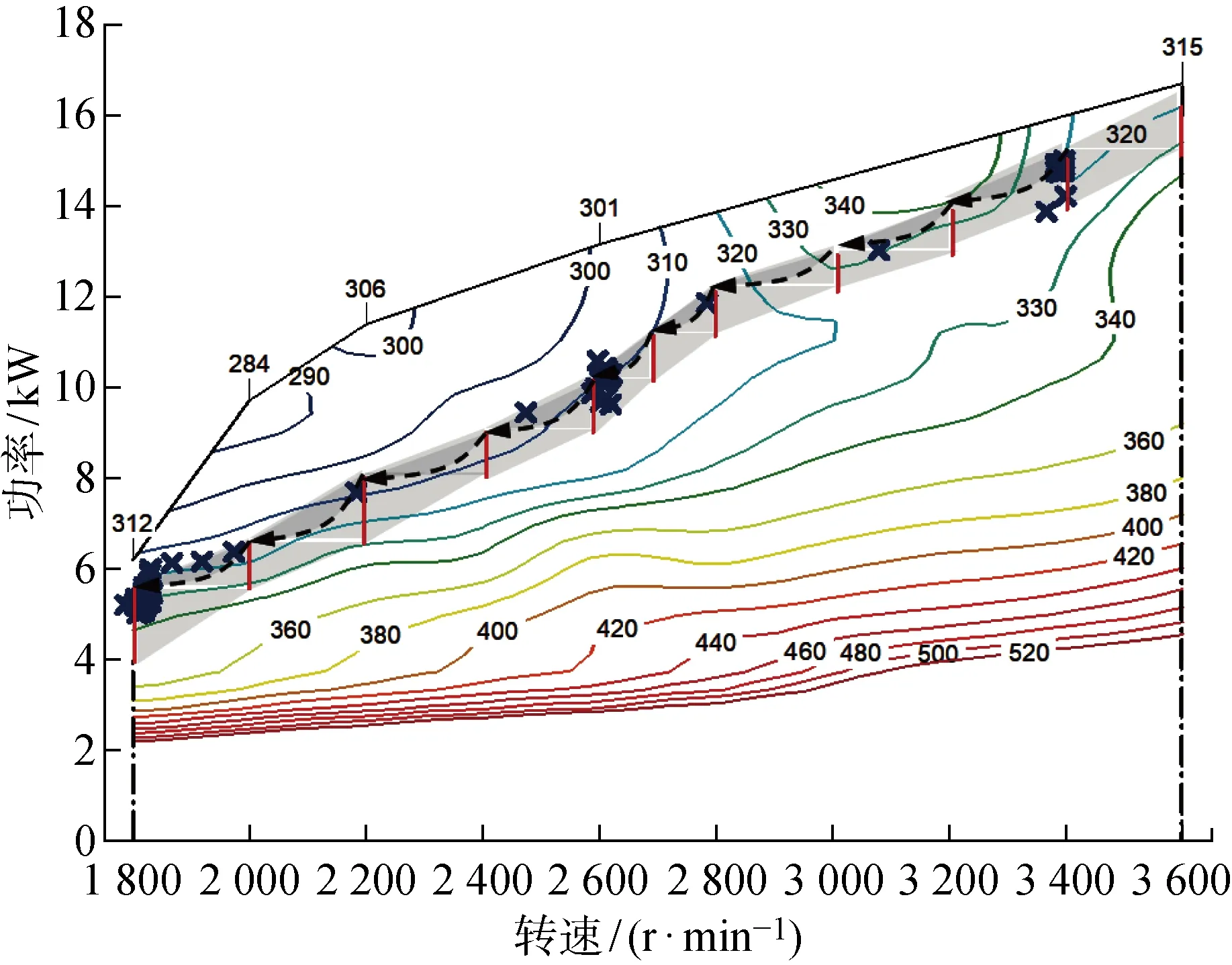
圖11 目標功率下降過程增程器工況點分布Fig.11 Distribution of range-extender operating point in target power dropping process
4 結論
(1) 針對增程器動態協調控制問題,利用混合勵磁電機氣隙磁場的平滑調整特性,提出增程器轉速-功率解耦控制算法,設計多轉速點功率跟隨策略,試驗結果表明可有效減少發電工況遷移過程中轉速的頻繁切換.
(2) 利用發動機控制器與增程器控制器獨立完成轉速閉環控制和發電功率閉環控制實現轉速與功率的解耦控制,引入勵磁電流這一中間變量實現了發電功率-勵磁電流的串級系統控制.試驗數據表明,相比于單閉環控制系統,采用串級系統控制可有效提高增程系統穩態與動態性能.
(3) 試驗結果表明,混合勵磁增程器輸出發電功率的動態響應較快,平均響應時間為10 s;穩態誤差在可接受范圍內,功率上升過程約為0.18 kW,功率下降過程約為0.43 kW;穩態及瞬態運行工況均位于設定工作區域內,發電控制策略可行.
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
汽車維修與保養(2020年11期)2020-06-09 05:42:06
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
汽車維護與修理(2016年3期)2016-02-28 13:16:54
汽車維修與保養(2015年1期)2015-04-17 03:25:30
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年6期)2014-02-27 12:10:49
汽車與新動力(2014年5期)2014-02-27 12:10:41
汽車與新動力(2014年2期)2014-02-27 12:10:15