武裝直升機與空地導彈系統相容性分析
2021-03-05 00:55:28鄒汝平陳韻陳士超
兵工學報 2021年12期
關鍵詞:發動機
鄒汝平, 陳韻, 陳士超
(中國兵器工業第203研究所, 陜西 西安 710065)
0 引言
武裝直升機具有火力強、靈活機動的作戰特點,有突出的超低空飛行能力,可在“一樹之高”實現對威脅目標的精確打擊,具有較強的戰場生存能力,是陸軍航空兵對地攻擊、奪取超低空制空權的主要武器平臺,已成為現代陸戰場最主要的空中突擊作戰力量[1-4]。空地導彈作為武裝直升機的主戰武器裝備,具備破甲、攻堅、侵徹、殺傷爆破等多功能毀傷效應,可對陸地、海上、超低空的多種時敏目標實施精確打擊[5-9]。
然而,武裝直升機作為空地導彈的掛裝平臺,需要充分考慮載機和導彈的相容性問題。由于直升機旋翼下洗氣流的存在,在各種擾動的組合影響下,導彈的初始彈道將引起非確定性散布;直升機采用懸停、前飛、下滑等攻擊方式時,不同的載機速度和姿態特性,將對空地導彈的初始發射條件和離軌飛行環境產生影響;導彈掛裝在直升機短翼下方,必須針對掛架的隨動范圍研究導彈近機體飛行時與載機及旋翼的安全飛行包線。此外,導彈離軌發射時,需要考慮發動機尾焰對直升機機體的安全性影響。
機- 彈相容性分析涵蓋空地導彈的掛飛適應性、機- 彈結構與電氣分離的安全性、發射離軌動態過程以及發射后初始彈道與武裝直升機的空間關系等。其中空地導彈的掛飛適應性、機- 彈分離的安全性一般通過掛飛試驗、地面適配性發射測試、振動沖擊條件下的結構與電氣性能評估來考核驗證。截止目前,國內外對于直升機載導彈機- 彈相容性的分析主要集中在旋翼下洗流對導彈的影響[10-13]。關于武裝直升機不同攻擊模式對導彈的影響,以及組合擾動環境下空地導彈初始彈道與載機動態影響方面的研究較少。
本文結合直升機載空地導彈掛載和發射的特點,對直升機旋翼下洗流、飛行速度、攻擊方式對空地導彈初始彈道的影響,以及導彈發射離軌后與載機的相對關系、發動機噴流對載機的安全性影響等方面對武裝直升機和空地導彈的機- 彈相容性進行分析研究,為直升機載空地導彈機- 彈相容性設計、攻擊條件選擇等提供技術支持。
1 坐標系定義
在進行多因素分析之前,首先對直升機與空地導彈相容性分析主要涉及的坐標系進行簡要介紹。涉及的坐標系主要包括地面坐標系Oexeyeze、彈體坐標系Oxpypzp、彈道坐標系Oxtytzt、速度坐標系Oxvyvzv、直升機機體坐標系Obxbybzb以及相對來流坐標系Oxryrzr(彈體坐標系、彈道坐標系、速度坐標系及相對來流坐標系的原點均為導彈質心O),其中Oexeyeze、Oxpypzp、Oxtytzt以及Oxvyvzv的坐標系定義詳見文獻[10]。下面分別對Obxbybzb、Oxryrzr進行簡要介紹。
Obxbybzb的原點Ob取在直升機的質心位置;Obxb軸與直升機的縱軸相重合,方向為指向機體頭部為正;Obyb軸位于機體縱向對稱平面內,與Obxb軸垂直,方向指向上為正;Obzb軸垂直于Obxbyb平面,方向按右手直角坐標系確定。Obxbybzb與Oexeyeze之間的關系由直升機的俯仰角?b、偏航角ψb和滾轉角γb確定。
相對來流坐標系Oxryrzr的原點O取在空地導彈的質心位置;Oxr軸與導彈相對氣流的速度向量vr一致,方向指向目標為正;Oyr軸位于包含導彈縱軸的縱向對稱平面內,與Oxr軸垂直,方向指向上為正;Ozr軸垂直于Oxryr平面,方向按右手直角坐標系確定。Oxryrzr與彈體坐標系Oxpypzp之間的關系由相對攻角αr和相對側滑角βr確定。Obxbybzb、Oexeyeze以及Oxpypzp的相對關系如圖1所示。
圖1 坐標系定義Fig.1 Definition of coordinate system
下面從多角度出發,分別對不同因素對武裝直升機與空地導彈的相容性影響進行分析。
2 發射安全性建模與仿真分析
2.1 發射安全性建模
武裝直升機典型的攻擊方式包括懸停、平飛和下滑3種。直升機載導彈發射架與直升機有一定的相對角度關系,側向距離機體近,且發射后彈道爬升,導彈離軌后受到下洗氣流及發射擾動等的影響,需要分析發射過程中彈道與直升機相對位置關系,確保對直升機的機體(側向)及旋翼(縱向)沒有干涉影響。
要綜合分析導彈發射的安全性,首先要確定掛載狀態下直升機與導彈的位置結構相對關系,具體參數如表1所示,表1中各參量表征的幾何結構關系如圖2、圖3所示。圖2和圖3中,Δxb、Δyb、Δzb分別表示導彈和直升機機體部位在機體坐標系Obxb軸、Obyb軸、Obzb軸中的相對位置。
表1 直升機與導彈相對關系參數Tab.1 Relative parameters of helicopter and missile
圖2 表1中各參量表征的幾何關系側視圖Fig.2 Lateral view of the geometrical relationship represented by the parameters in Tab.1
圖3 表1中各參量表征的幾何關系俯視圖Fig.3 Vertical view of the geometrical relationship represented by the parameters in Tab.1
基于導彈的運動學動力學模型、直升機運動學模型及各種邊界、擾動模型等,建立機- 彈相對運動仿真模型,如圖4所示。圖4中,xpe、ype、zpe為導彈在地面坐標系的位置坐標,?、ψ、γ分別為導彈的俯仰角、偏航角、滾轉角,xbe、ybe、zbe為直升機在地面坐標系的位置坐標,vb表示直升機的飛行速度。
圖4 機- 彈相對運動仿真模型Fig.4 Simulation model of relative motion of helicopter and missile
2.2 不同攻擊模式下發射安全性仿真分析
分別對直升機懸停、平飛及下滑3種不同攻擊模式進行彈道仿真,典型仿真參數如表2所示。
表2 不同攻擊模式下彈道仿真參數Tab.2 Simulation parameters of missile trajectory under different attacking modes
發射架相對直升機角度設置為最大調轉角度值8°,在俯仰、偏航和滾轉3個方向均添加較為苛刻的初始擾動。導彈飛離直升機過程中,導彈與載機相對位置空間關系的仿真實驗結果如圖5~圖10所示,實際飛行試驗結果如圖11~圖14所示,圖中Δx、Δy、Δz分別表示導彈和直升機在地面坐標系下的相對位置。其中:圖5、圖6分別對應直升機懸停攻擊模式時,仿真實驗結果的側視圖和俯視圖;圖7、圖8分別對應直升機平飛攻擊模式時,仿真實驗結果的側視圖和俯視圖;圖9、圖10分別對應直升機下滑攻擊模式時,仿真實驗結果的側視圖和俯視圖;圖11、圖12分別給出了懸停攻擊模式時,導彈實際飛行與載機相對位置的空間關系;圖13、圖14分別給出了平飛攻擊模式時,導彈實際飛行與載機相對位置的空間關系。
圖5 直升機懸停攻擊時機- 彈相對關系側視圖Fig.5 Lateral view of the relationship between the helicopter and the missile during helicopter hovering
圖6 直升機懸停攻擊時機- 彈相對關系俯視圖Fig.6 Vertical view of the relationship between the helicopter and the missile during helicopter hovering
圖7 直升機平飛攻擊時機- 彈相對關系側視圖Fig.7 Lateral view of the relationship between the helicopter and the missile during helicopter level flying
圖8 直升機平飛攻擊時機- 彈相對關系俯視圖Fig.8 Vertical view of the relationship between the helicopter and the missile during helicopter level flying
圖9 直升機下滑攻擊時機- 彈相對關系側視圖Fig.9 Lateral view of the relationship between the helicopter and the missile in helicopter descent mode
圖10 直升機下滑攻擊時機- 彈相對關系俯視圖Fig.10 Vertical view of the relationship between the helicopter and the missile in helicopter descent mode

圖11 直升機懸停攻擊時機- 彈相對關系側視圖(飛行實驗)Fig.11 Lateral view of the relationship between the helicopter and the missile during helicopter hovering (flight experiment)

圖12 直升機懸停攻擊時機- 彈相對關系俯視圖(飛行實驗)Fig.12 Vertical view of the relationship between the helicopter and the missile during helicopter hovering (flight experiment)
圖13 直升機平飛攻擊時機- 彈相對關系側視圖(飛行實驗)Fig.13 Lateral view of the relationship between the helicopter and the missile during helicopter level flying (flight experiment)
圖14 直升機平飛攻擊時機- 彈相對關系俯視圖(飛行實驗)Fig.14 Vertical view of the relationship between the helicopter and the missile during helicopter level flying (flight experiment)
2.3 發射安全性定量分析
在垂直方向上,即考慮導彈與旋翼的位置關系時,若滿足以下條件,則導彈不會與直升機發生干涉:

(1)
式中:y(t)表示導彈y軸方向位置隨時間的變化量;?b(t)表示直升機俯仰角隨時間的變化量;?(t)表示導彈俯仰角隨時間的變化量。(1)式中最后一項的正負號取決于導彈飛離旋翼時二者之間的幾何關系。當導彈彈頭離開旋翼時取負號;當導彈彈尾離開旋翼時取正號;t∈(0,tl)表示時間,tl為導彈飛離旋翼的時刻。
在水平方向上,即考慮導彈與直升機機體位置關系時,若滿足以下條件,則導彈不會與直升機發生干涉:
(2)
式中:z(t)表示導彈z軸方向位置隨時間的變化量,t∈(0,th),th為導彈彈尾飛離機頭的時刻;ψ(t)表示導彈偏航角隨時間的變化量。
不同直升機攻擊模式下,導彈飛離機頭時刻導彈與旋翼之間距離、導彈相對機體側向位置以及飛離旋翼時刻導彈與旋翼之間距離的具體數值結果如表3所示。從表3中可以看出,不同的直升機攻擊條件下,導彈與直升機的縱向、側向均有足夠的安全距離,導彈發射過程對直升機旋翼、機體不存在安全風險。
表3 不同攻擊方式下發射安全性的實驗結果Tab.3 Experimental results of launching security under different attacking modes
需要說明的是,本文給出的統計數值結果分別為導彈彈尾飛離機頭時刻、導彈彈頭飛離直升機旋翼以及導彈彈尾飛離直升機旋翼時刻3個特征點。為使安全性分析結果的余量更大,導彈飛離機頭時刻是指導彈彈尾飛離機頭的時刻,因為此時彈頭距離直升機旋翼更近。
由表3可見,在空地導彈飛離直升機的過程中,導彈與旋翼的距離以及導彈與機體的距離均大于1 m,這些參數對橫軸方向的距離量值影響較小,對分析空地導彈發射安全性的影響可以忽略;實際導彈發射飛行過程中,導彈與直升機之間的各距離參數數值更大,這是因為仿真實驗時設置的條件較為苛刻,導彈的發射俯仰角和彈道擾動設置均大于導彈實際飛行情形。可見,合理的初始彈道設計和初始擾動抑制可有效提升空地導彈的發射安全性。
事實上,要想使安全性定量分析更嚴密,計算導彈與直升機之間發射安全性的幾何關系時,還需要綜合考慮彈翼最大外廓的范圍以及導彈飛離直升機過程中的姿態角等參數。然而,這些參數的量值很小,此處予以忽略。
3 直升機旋翼下洗流對空地導彈初始彈道影響
3.1 下洗流對空地導彈初始彈道影響
當導彈處于下洗流區域時,在下洗流場的作用下,導彈飛行速度的大小和方向將產生變化,而導彈相對氣流的攻角和側滑角變化將會直接改變作用在導彈上的氣動力和氣動力矩。
直升機下洗流對導彈的影響可描述為在流場范圍內,存在量值大小為vi,沿機體坐標系Obyb軸方向的風作用于導彈上(vi<0 m/s,表示下洗流場沿Obyb軸負方向),因此作用在導彈上相對來流的速度為導彈速度v和下洗流場速度vi的矢量差。下洗流場將帶來附加的攻角和側滑角。
將旋翼下洗后導彈相對于氣流的速度用vr表示,則有
vr=v-vi,
(3)
下洗流場速度產生的原因在于,直升機旋翼下洗流場是一個渦流場,渦流在它周圍會感應出速度場,稱為誘導速度場,誘導速度是旋轉的渦心通過黏性作用帶動周圍空氣運動的速度,vi可通過工程計算或基于自由尾跡分析計算得到,洗流誘導速度是下洗誘導速度、切向誘導速度和徑向誘導速度3個方向的流速矢量和[11-14]。
相對速度向量vr的模可表示為
(4)
式中:vx、vy、vz為地面坐標系中導彈質心運動速度在xe、ye、ze軸3個方向上的分量;vix、viy、viz為旋翼下洗速度在地面坐標系xe、ye、ze軸3個方向上的分量。
首先求解vix、viy、viz,Obxbybzb和Oexeyeze之間的關系由武裝直升機的俯仰角、偏航角和滾轉角確定,Oexeyeze至Obxbybzb的轉換矩陣L(γb,?b,ψb)可表示為
(5)
因此,機體坐標系至地面坐標系的轉換矩陣為L-1(γb,?b,ψb)。將沿機體坐標系的下洗速度vi轉換至地面坐標系,即
(6)
由于旋轉矩陣L(γb,?b,ψb)是一個正交矩陣,此旋轉矩陣的逆和矩陣的轉置相等,即L-1(γb,?b,ψb)=LT(γb,?b,ψb),L-1(γb,?b,ψb)表達式見(7)式。

(7)
(7)式代入(6)式,可得
vix=(-sin ?bcosψbcosγb+sinψbsinγb)·vi,
viy=cos ?bcosγb·vi,
viz=(sin ?bsinψbcosγb+cosψbsinγb)·vi.
(8)
進一步求解相對氣流速度在Oxpypzp上的3個分量vrxp、vryp、vrzp,可以得到相對攻角αr和相對側滑角βr.
為求vrxp、vryp、vrzp,重寫(3)式,有
(9)
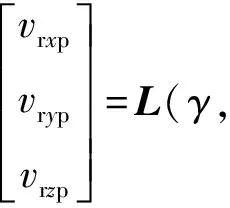
(10)
式中:L(γ,?,ψ)的表達式形式與(5)式的旋轉矩陣L(γb,?b,ψb)相同,僅下標不同。
根據(10)式可得相對氣流速度在彈體坐標系上的3個分量,繼而可以得到旋翼下洗條件下導彈的相對攻角αr和相對側滑角βr:
(11)
當導彈飛越旋翼下洗流區域時,作用于導彈上的總空氣動力和空氣動力矩取決于vr、αr和βr.
來流坐標系下,氣動力中的阻力Fxr、升力Fyr和側向力Fzr可分別表示為
(12)
Fyr=Cy(αr,Ma)qrS,
(13)
Fzr=Cz(βr,Ma)qrS,
(14)
(15)
(16)
(17)
計算得到的氣動力需要轉換到Oxtytzt進行彈體運動學分析,各坐標系之間的關系如圖15所示。
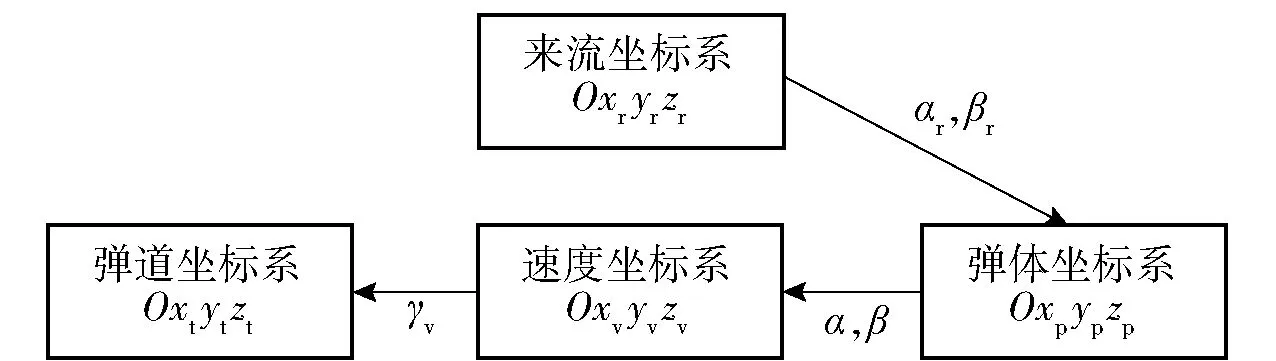
圖15 坐標系之間的轉換關系Fig.15 Transformation between coordinate systems
由圖15可見,Oxryrzr和Oxpypzp之間的關系由相對攻角αr和相對側滑角βr確定,Oxpypzp和Oxtytzt之間的關系由導彈攻角α、導彈側滑角β和速度傾斜角γv確定。
因此,作用在導彈上的氣動力[Fxr,Fyr,Fzr]T在Oxtytzt的投影[Fxrxt,Fyryt,Fzrzt]T可表示為
(18)
式中:
(19)
(20)
(21)
導彈飛離旋翼后,旋翼下洗流場對導彈不再有影響,即vi=0 m/s.將計算并轉換得到的氣動力和氣動力矩代入導彈的六自由度運動方程[10],可以分析導彈在下洗流影響下的運動軌跡。
旋翼下洗流場對導彈發射的初始飛行狀態和彈道軌跡的影響,主要表現在下洗流誘導速度場引起來流速度、攻角、側滑角的變化,對導彈產生向下的俯仰干擾力矩,該力矩使得導彈抬頭。
直升機下洗流場參數可通過工程計算、自由尾跡分析計算等方法獲取[15]。某直升機旋翼典型下洗流速度的工程計算結果如圖16所示,r表示旋翼平面中各點與旋翼中心的距離。由圖16可見,下洗流速度從旋翼槳盤內側向外側逐漸增大,在接近旋翼邊界時速度達到最大,然后迅速減小。
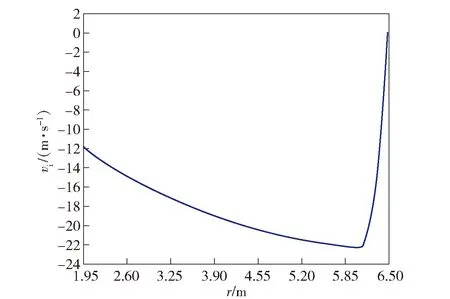
圖16 直升機旋翼下洗流速度Fig.16 Down-wash flow speed of helicopter’s rotor
3.2 下洗流對空地導彈初始彈道影響仿真分析
以載機懸停攻擊目標為例,仿真分析下洗流對空地導彈初始彈道的影響,俯仰姿態角、彈道傾角與y軸方向彈道曲線的實驗結果分別如圖17~圖19所示。可見,在下洗流場的作用下,初始段導彈的俯仰姿態角?有明顯抬高,但此時導彈速度較低,對彈道影響較小。
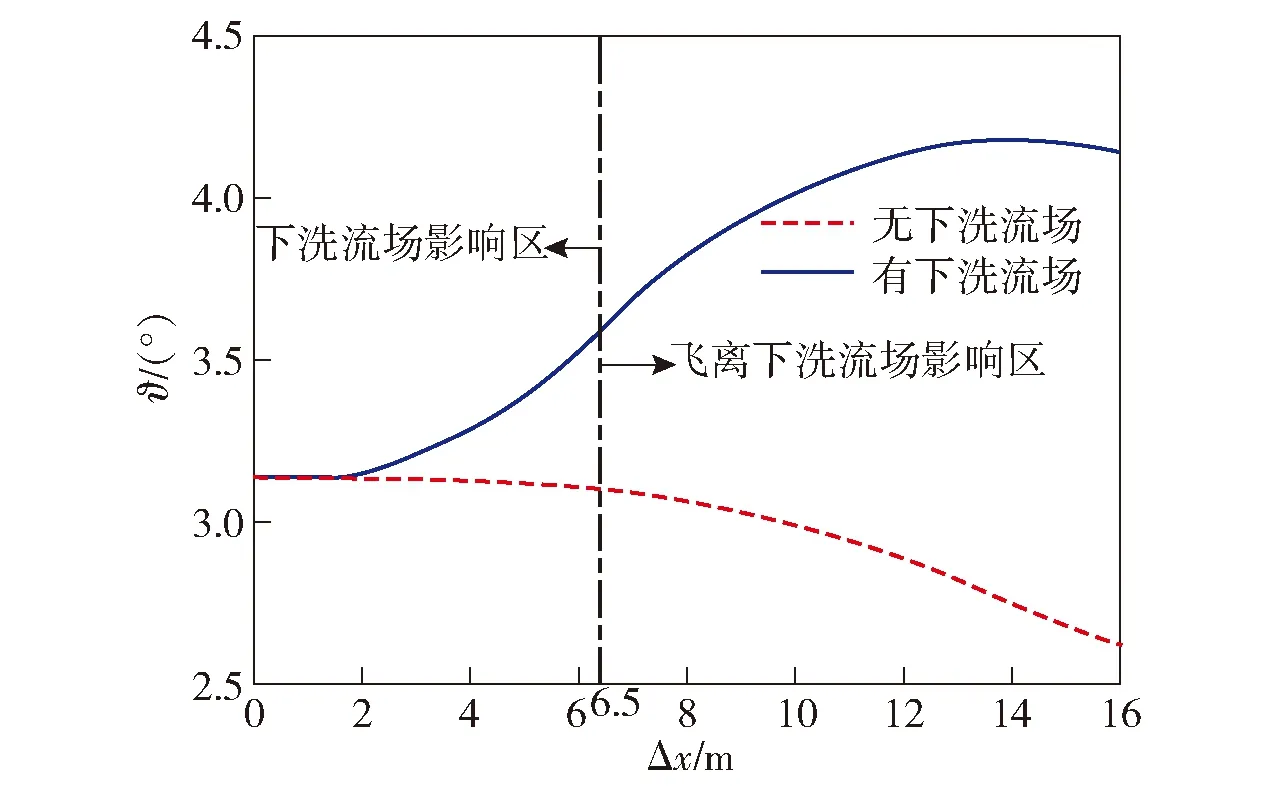
圖17 俯仰姿態角曲線Fig.17 Curves of pitching attitude angle
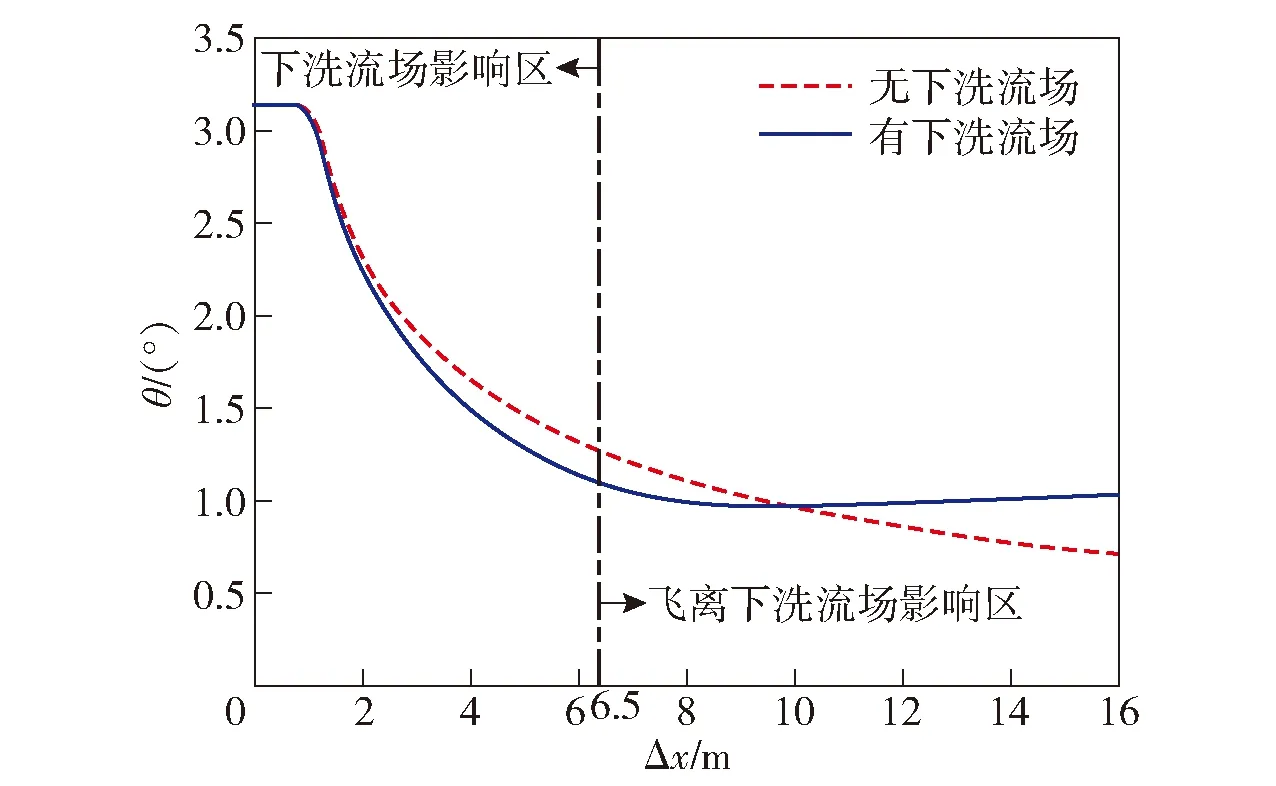
圖18 彈道傾角曲線Fig.18 Curves of trajectory inclination angle
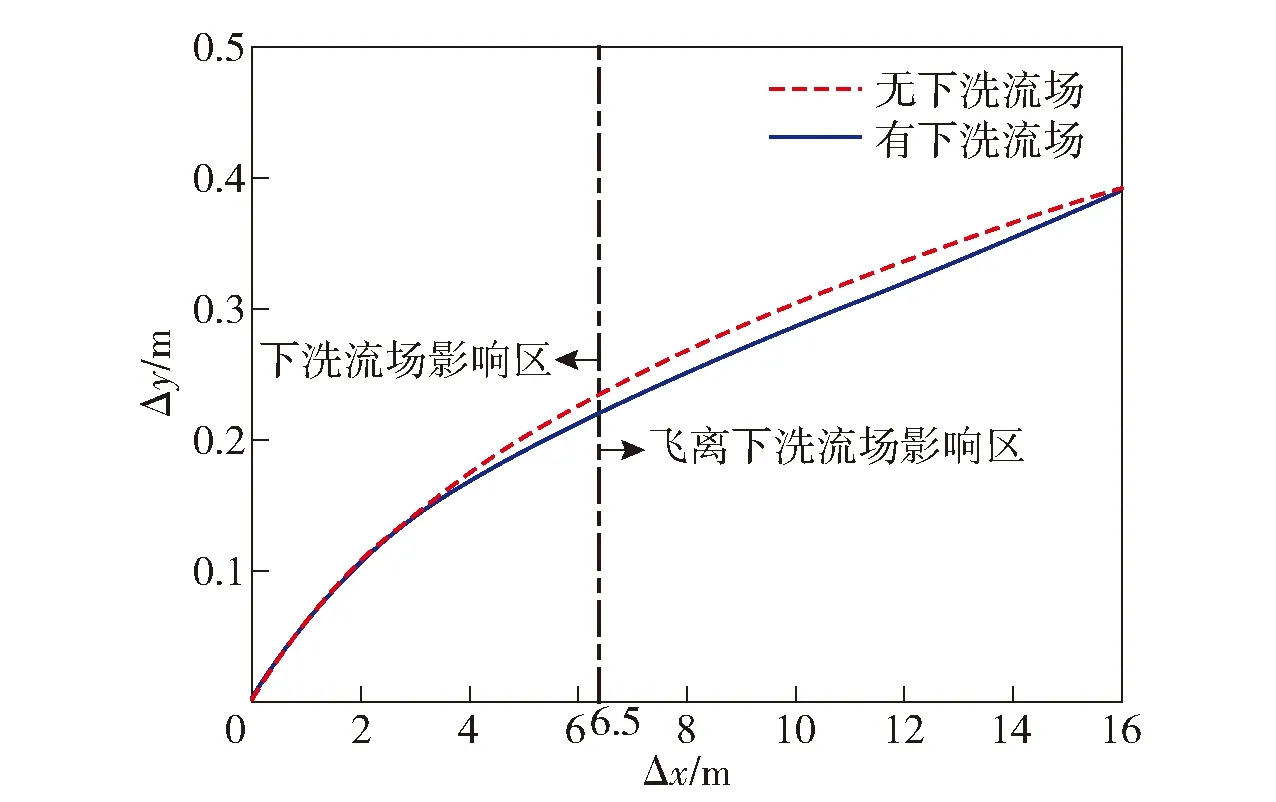
圖19 彈道曲線Fig.19 Curves of missile trajectory
4 直升機飛行速度對導彈初始彈道的影響
通常而言,武裝直升機的作戰飛行速度小于等于200.0 km/h,直升機載空地導彈通常采用軌式發射形式。導彈離軌過程中,Δvm表示導彈的離軌初速,是發動機工作帶來的速度增量。由于離軌過程中導彈仍與直升機固連,直升機的飛行速度帶給導彈的速度分量為vb,速度傾角為θb,θ0為Δvm與Oxe軸之間的夾角。導彈離軌過程的速度vm為Δvm和vb的矢量和,即
vm=Δvm+vb.
(22)
根據幾何關系及矢量相加原理,可以得到離軌過程導彈的速度大小vm和方向θ,可分別表示為
(23)
(24)
若直升機處于懸停狀態,即vb=0 m/s,則導彈速度與Δvm一致。導彈離軌后姿態角不再受到發射架約束,直升機飛行速度對導彈不再有影響,導彈按六自由度運動規律飛行。
圖20對比了不同直升機飛行速度下的導彈離軌過程,考慮兩種直升機飛行速度vb1和vb2,直升機速度傾角均為θb,且vb2>vb1.
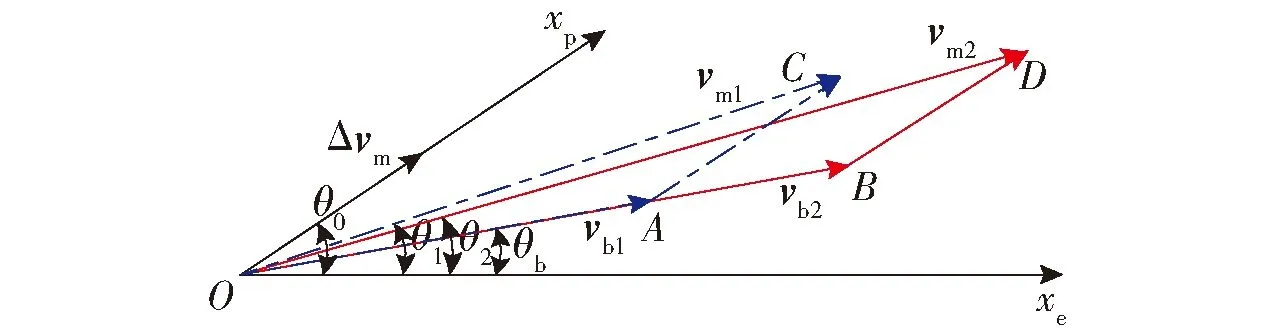
圖20 導彈離軌過程的運動Fig.20 Motion of missile before leaving from launcher
圖20中:在△OAC中,OA對應直升機的飛行速度帶給導彈的速度分量vb1,AC對應導彈離軌初速Δvm,OC對應導彈離軌過程的速度vm1,彈道傾角為θ1=∠COxe;在△OBD中,OB對應直升機的飛行速度帶給導彈的速度分量vb2,BD對應導彈離軌初速大小Δvm,OD對應導彈離軌過程的速度vm2,彈道傾角為θ2=∠DOxe;Δvm的大小由發動機工作特性和導軌長度等條件決定,不受載機特性的影響,即ACBD;當直升機飛行速度vb2>vb1時,對應的導彈離軌速度vm2>vm1,彈道傾角θ2<θ1;載機飛行速度越快,導彈離軌速度越大,離開載機區域的時間越短,且彈道爬行高度越低。
圖21~圖23給出了直升機不同飛行速度條件下的導彈速度、彈道傾角和y軸方向相對彈道曲線結果。仿真條件中待攻擊目標位置位于(1 000 m,-50 m,0 m),直升機分別采用懸停攻擊方式(此時直升機飛行速度為0 km/h)、平飛攻擊方式(此時直升機飛行速度分別為100 km/h和200 km/h,速度傾角為0°)攻擊目標。由圖21可見,直升機飛行速度越快,導彈相應的離軌速度也越快。由圖22可見,直升機飛行速度越快,則對應的彈道傾角越小。由圖23可見,直升機飛行速度越高,導彈的初始彈道越低。

圖21 不同直升機速度下的離軌速度曲線Fig.21 Curves of missile speed after leaving from launcher at different helicopter flight speeds
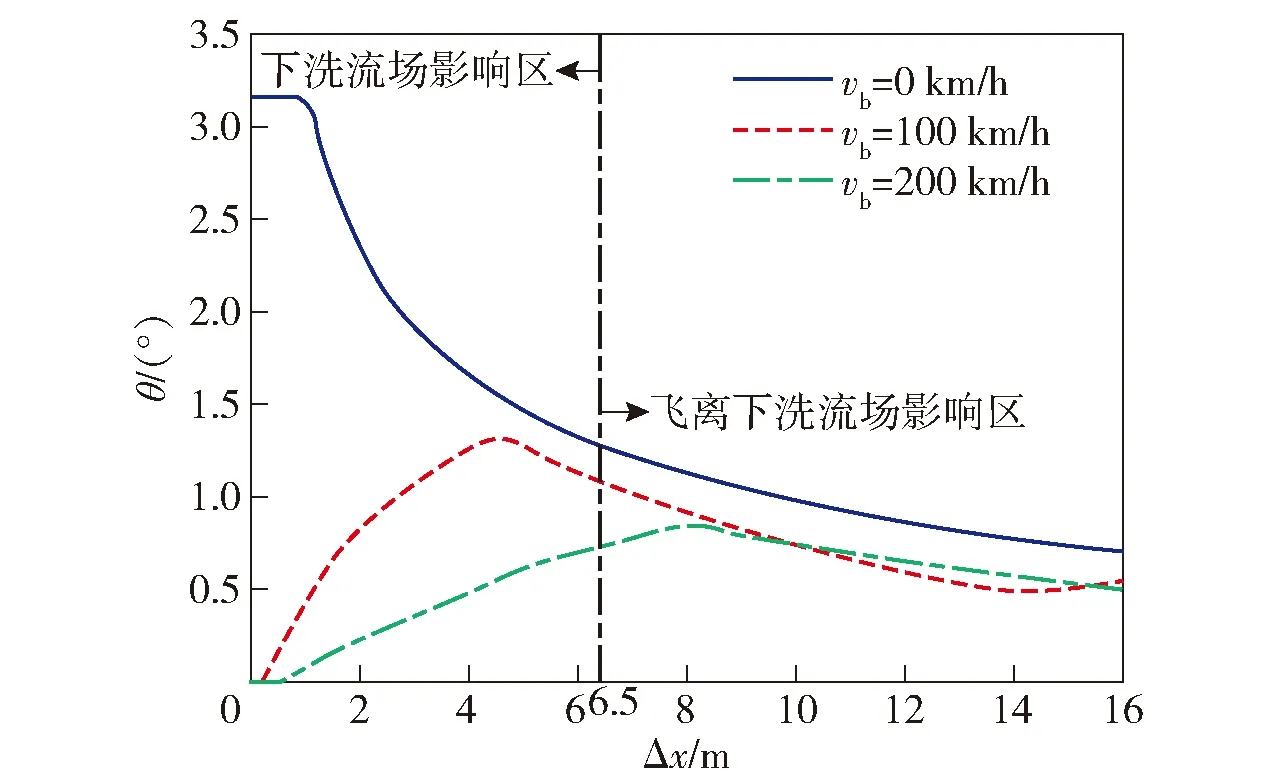
圖22 不同直升機速度下的彈道傾角曲線Fig.22 Curves of trajectory inclination angle at different helicopter flight speeds
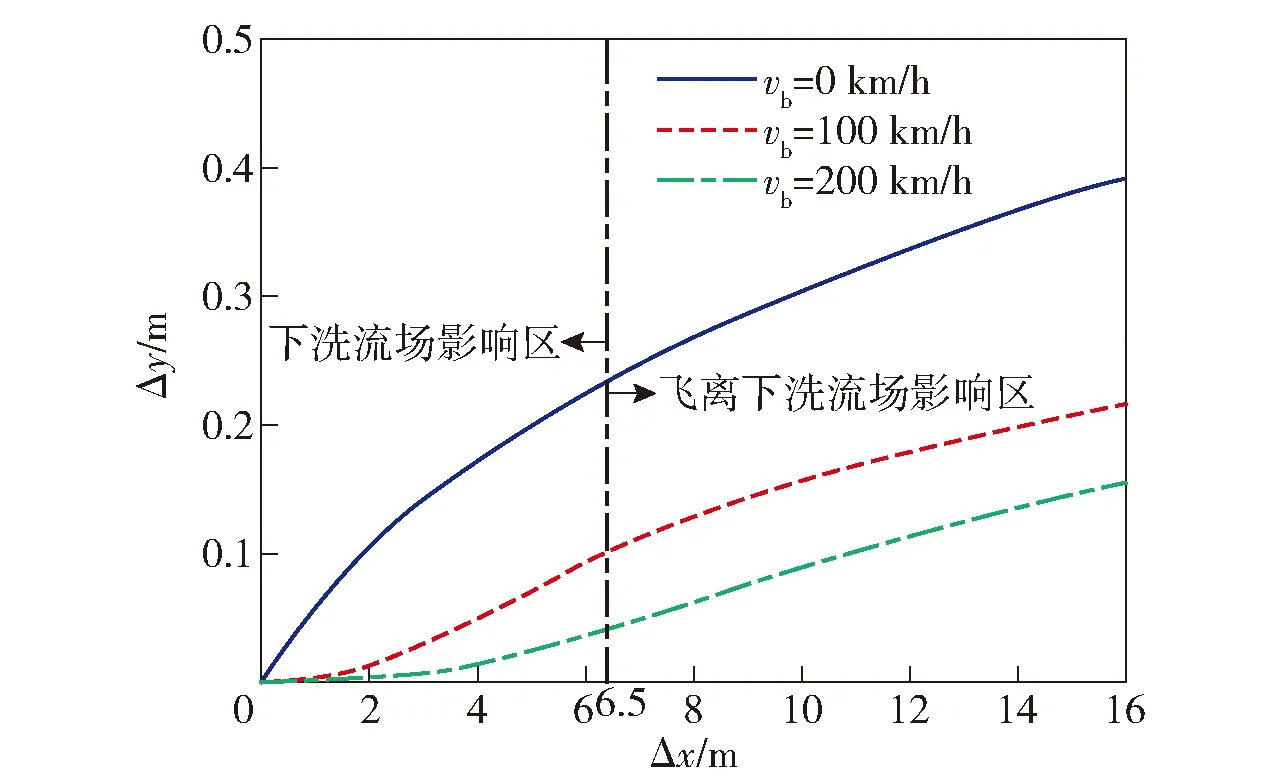
圖23 不同直升機速度下的彈道高度曲線Fig.23 Curves of height of missile trajectory at different helicopter flight speeds
5 發動機噴流對直升機的影響
發動機噴流對直升機的影響主要體現在燃氣和后噴物兩個方面。為了獲得較大的導彈離軌速度,通常采用初始大推力的發動機內彈道方案。初始大推力對應較高的初始工作壓強(可達12~20 MPa)、較強的發動機噴流和較大的噴流影響區域。發動機噴流的流場建立過程很快,通常為毫秒級,此時導彈仍然在發射導軌上。導彈在發動機推力作用下向前運動直至離軌,發動機噴流及其影響區隨之向前運動,高溫燃氣將不可避免地對直升機機體和發射導軌產生沖刷效應。此外,固體發動機噴流中通常含有固相噴出物。固相噴出物隨高溫燃氣流噴出,可能與直升機的機體和發射導軌發生碰撞。
分析發動機噴流對直升機影響的流程圖如圖24所示,其核心在于通過數值仿真或試驗獲得可靠的發動機尾流場數據,從而分析其影響區域,同時考慮兩相流效應,獲得噴出物的大致運動軌跡。
圖24 發動機噴流對直升機的影響分析流程圖Fig.24 Analysis process of the influence of SRM plume on helicopter
圖24中的流體與固體耦合分析綜合機彈相對運動模型和發動機尾焰特性開展,目的是進行噴流燃氣對直升機的影響評估。運動學分析則是綜合機彈相對運動模型和發動機后噴物特性開展,目的是進行噴流顆粒對直升機的影響評估;機彈相容性試驗通過試驗來驗證流體與固體耦合分析和運動學分析。
以某型空地導彈為例,應用Fluent軟件對發動機尾流場進行建模仿真,其射流方向的溫度分布曲線(即發動機噴管軸線上的溫度分布)如圖25所示。

圖25 發動機噴管軸線上的溫度分布Fig.25 Temperature distribution along the axis of SRM nozzle
由圖25可見,發動機后噴燃氣的能量主要集中在軸線附近,其溫度和速度沿徑向均衰減很快。以溫度900 K來判斷火焰長度,則該穩態流場的火焰長度約為3.3 m,半徑方向最大影響范圍約0.2 m.
發動機噴流影響區域固連于導彈尾部,進行導彈與直升機相對運動過程仿真(此處忽略發動機噴流影響區域的建立過程和波動)和發動機噴流影響區域與直升機機體的干涉分析,可以獲得發動機噴流對直升機的機體和發射導軌的影響區域和作用時間。結合流體- 固體耦合仿真,還可以獲得直升機的機體和發射導軌局部的溫度場信息,判斷可能的燒蝕風險點。發動機噴流與直升機位置關系如圖26所示。

圖26 發動機噴流與直升機位置關系示意圖Fig.26 Relative position between the helicopter and the plume of SRM
在尾流場仿真的同時,在入口加入顆粒相噴出物,考慮流場和顆粒的單向耦合,可獲得典型的顆粒運動軌跡。發動機噴流中的噴出物信息可以通過地面試驗收集后方噴出物測量并統計獲得,也可以通過高速電荷耦合器件相機和激光器搭建粒子成像測速測量系統獲得[16]。進行導彈運動過程中顆粒軌跡和直升機機體的干涉分析,可獲得噴出物與直升機機體和發射導軌的碰撞點和碰撞時的顆粒速度、方位信息。通過氣壓或者機械驅動試驗裝置發射不同數量顆粒直接碰撞直升機機體蒙皮或發射導軌,設計不同時長的考核試驗,即可分析評估單個噴出物單次、多次或者持續碰撞對直升機機體和發射導軌的影響。
事實上,針對發動機噴流與后噴物的數值模擬和試驗手段都存在一定誤差,很難定量描述其對直升機的影響。因此實際導彈研制過程中,通常需要進行試驗彈掛載發射的機- 彈相容性實驗來驗證其對載機的真實影響。某空地導彈的真實發動機點火機- 彈相容性實驗如圖27所示。在機- 彈相容性實驗中,在直升機機體和發射導軌特征位置布置多組壓力和溫度傳感器,可獲得特征位置的相關流場和顆粒信息。將測量信息用于數值仿真模型的驗證和修正,可為后續數值仿真分析與設計優化奠定基礎。

圖27 發動機點火機- 彈相容性實驗Fig.27 Compatibility experiment of helicopter and missile during SRM firing
6 結論
本文結合空地導彈在直升機攻擊條件下的飛行特性,從直升機旋翼下洗氣流對初始彈道的影響、直升機飛行速度對初始彈道的影響、導彈發射過程中導彈初始彈道與直升機的相對位置關系、發動機噴流對武裝直升機的影響等多角度,對武裝直升機和空地導彈的機- 彈相容性進行了較全面的系統分析。所得主要結論如下:
1)直升機下洗流速度會給空地導彈的初始彈道帶來俯仰抬頭的干擾力矩,初始段導彈姿態角會有上抬現象,但由于導彈的初始速度偏低,對彈道的影響較小。
2)不同的直升機飛行速度會對空地導彈的初始彈道產生影響,直升機飛行速度越大,初始彈道越低。
3)發動機尾焰對直升機的影響可通過仿真分析與外場試驗相結合的方式進行。
此外,結合武裝直升機和導彈的相對位置關系,對發射安全性進行了詳細建模,實驗結果表明,嚴苛條件下,空地導彈的初始彈道與直升機的縱向、側向均有足夠的安全距離,導彈發射對直升機旋翼、機體不存在安全風險。本文方法可為直升機載空地導彈機彈相容性設計、攻擊條件選擇等提供有力的技術支持。
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
汽車維修與保養(2020年11期)2020-06-09 05:42:06
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
太空探索(2016年8期)2016-07-10 09:21:58
汽車維護與修理(2016年3期)2016-02-28 13:16:54
汽車維修與保養(2015年1期)2015-04-17 03:25:30
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年6期)2014-02-27 12:10:49
汽車與新動力(2014年5期)2014-02-27 12:10:40