基于卷積神經網絡與奇異值分解的水電機組故障診斷方法研究
2021-03-05 08:18:18唐擁軍肖志懷
中國農村水利水電 2021年2期
唐擁軍,劉 東,肖志懷,胡 曉,賴 旭
(1.國網新源控股有限公司技術中心,北京 100161;2.武漢大學 水資源與水電工程科學國家重點實驗室,武漢 430072;3.武漢大學 水力機械過渡過程教育部重點實驗室,武漢 430072)
0 引 言
水電機組作為水電能源轉換的關鍵設備,其安全性和穩定性一直是水電行業關注的重點。隨著水電機組不斷向著大型化、復雜化方向發展,機組結構日趨復雜,如何對水電機組進行有效的故障診斷成為了行業研究的熱點問題。
振動是機組故障的主要表現形式,相關研究表明,水電機組大約80%的故障都可通過機組振動體現出來[1]。為了識別機組振動信號所反映的不同運行狀態,有必要對信號進行特征提取。學者們研究了多種信號特征提取方法[2,3],奇異值分解(Singular Value Decomposition,SVD)作為一種現代數學工具,其原理是通過數據矩陣變換提取信號特征,不同于傅里葉分析的時頻域轉換思想,但具有類似的信號分析能力。由于SVD方法穩定簡捷,因此在實際工程領域得到了廣泛的應用[4,5]。本文的工作之一是將小波變換與奇異值分解相結合,提取機組擺度信號波形特征。
在水電機組實際運行中,除振動信號外,軸心軌跡作為反映機組運行狀態的信息載體,其形狀特征對判斷機組的運行狀態非常重要,由于軸心軌跡為二維圖像,特征提取困難,使得相關研究受到限制。近年來,隨著深度學習的興起,卷積神經網絡(Convolutional Neural Networks,CNN)由于其強大的圖像特征學習能力在圖像特征提取和識別方面獲得了廣泛的應用,但在水電領域尚未得到有效推廣。魏東等[6]構建了一種新型CNN,用于輸電線路故障診斷。Jeong等[7]利用CNN實現了轉子軸心軌跡的識別。
本文結合小波變換和SVD理論,提取水電機組擺度信號波形特征。同時,根據擺度信號繪制軸心軌跡,并構建CNN提取軸心軌跡圖像特征。最后,將SVD提取的波形特征和CNN提取的圖像特征相結合,構建混合特征向量,利用概率神經網絡(Probabilistic Neural Network,PNN)進行識別分類,進而識別機組的不同運行狀態,達到故障診斷的目的。文章通過實驗驗證了所提方法的有效性和可行性。
1 理論基礎
1.1 卷積神經網絡
CNN是深度學習的代表算法之一,近年來,它在圖像識別和目標檢測方面表現出了優異的性能。目前,CNN已成功應用于文檔識別[8]、語音檢測[9]、故障診斷[10]等領域。
CNN的基本結構包括輸入層、卷積層、池化層、全連接層和輸出層。輸入層用于獲取輸入圖像。卷積層通過卷積操作提取圖像特征。池化層對卷積層提取的特征進行降采樣處理,減少網絡計算量。卷積層和池化層交替分布,對之前提取的圖像特征進一步提取,抽象出更高層次的特征。全連接層接收前端網絡傳輸的特征向量,計算網絡輸出,最后輸出層對圖形進行分類。
卷積層:卷積層是CNN的核心部分。通過多個卷積核對輸入圖像進行卷積操作,加入偏置并經過激活函數計算得到一系列的特征圖像,卷積層的數學模型可以表示為:
(1)


(2)
池化層:池化層通常連接在卷積層之后,對特征圖像進行降維。該方法在一定程度上保持了特征尺度的不變性的同時,將圖像特定區域的相鄰像素合并為一個單一的代表值,從而減小了圖像的尺寸。數學表達式為:
(3)
全連接層:CNN的分類部分由全連接層和分類器組成,分類器主要對上一層的信息進行整合和分類。softmax分類器是CNN中常用的分類器。
交叉熵函數對誤差具有很高的敏感性,是深度學習網絡中常用的損失函數。其表達式為:
(4)
式中:y為輸出節點的實際值;d為節點期望值;M為輸出節點的個數。
本文所構建的CNN采用ReLU激活函數和交叉熵驅動的學習規則,使用小批量隨機梯度下降法進行訓練。
1.2 小波變換與奇異值分解
1.2.1 小波理論
在小波理論中,對連續小波變換中的尺度因子與平移因子直接進行離散化處理,則得到相應的離散小波變換。連續小波變換的數學表達式為:
CWTf(a,τ)=〈f(t),ψa,τ(t)〉=
(5)
式中:a為尺度因子;τ為平移因子;ψ(·)為小波基函數。

DWTf(m,κ)=〈f(t),ψm,κ(t)〉=
(6)
為了實現計算機多尺度分析,需要利用快速算法對分解系數進行離散化處理。對于能量有限的信號f(t),可以使用有限精度分解方法,如式(7)所示:
(7)
式中:cj,k為尺度系數;φj,k(t)為尺度空間;dm,k為小波系數;ψm,k(t)為小波空間。
cj,k與dm,k可以通過圖1中的Mallat分解算法得到,該算法的原理參見文獻[13,14]。

圖1 Mallat分解算法Fig.1 Diagram of Mallat decomposition
實際中,對水電機組振動信號f(t)的采集一般滿足Nyquist采樣定理,則采樣得到的離散信號f(n)可近似等同于初始系數c0,k,即如式(8)所示。
c0,k≈f(n)
(8)
本文對機組擺度信號的每個小波分解系數進行差值重構,使其長度與擺度信號一致,并作為擺度信號在相同尺度上的信號分量。
1.2.2 奇異值分解

(9)
式(9)即為奇異值分解的定義式,意味著矩陣A可以被分解為3個矩陣的乘積,其中Σ=diag(σ1,σ2,…,σr)為對角陣,σ1,σ2,…,σr為矩陣A的奇異值,且有σ1≥σ2≥…≥σr>0,r=rank(A)。在本文中,機組擺度信號的小波分解系數作為奇異值分解的輸入矩陣A,奇異值分解向量:
S=[σ1,σ2,…,σr]
(10)
式中:S為信號特征向量。
2 基于CNN與SVD的特征提取方法
本文提出的混合故障診斷方法是一種基于CNN和小波奇異值理論的組合算法(以下將其命名為CNN-小波SVD),算法流程圖如圖2所示,在該算法中,CNN作為特征提取器,提取軸心軌跡圖像特征,提取的特征向量記作P=[p1,p2,…,pn],小波SVD提取擺度信號波形特征,特征向量記作S=[σ1,σ2,…,σr],將CNN提取的圖像特征和小波奇異值提取的波形特征結合,構建混合特征向量X=[S,P],輸入到概率神經網絡進行分類。其詳細步驟可以分為如下4步:
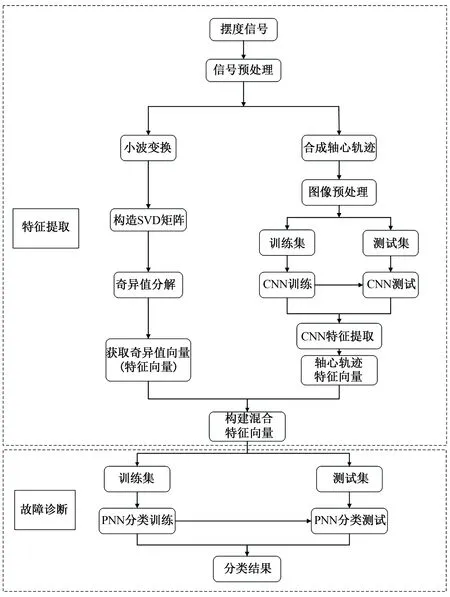
圖2 CNN-小波SVD算法流程圖Fig.2 Flowchart of CNN-Wavelet SVD
(1)利用小波變換將水電機組去噪后的擺度信號分解為一系列小波分解系數。對不同的分解系數進行重構,構造SVD輸入矩陣,提取奇異值作為波形特征向量S。
(2)利用X、Y方向擺度信號繪制軸心軌跡圖,并通過圖像預處理使圖像尺寸保持一致,作為CNN的輸入。CNN結構如圖3所示:網絡結構分為5層,包括2層卷積層,2層池化層和1層全連接層,全連接層節點值即為提取的圖像特征向量P;卷積核尺寸分別為9×9和3×3,其他網絡參數見表1。
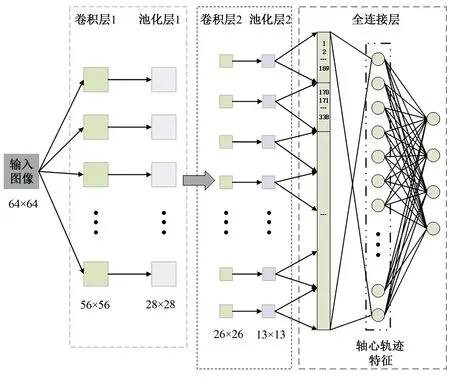
圖3 CNN結構圖Fig.3 The structure of CNN
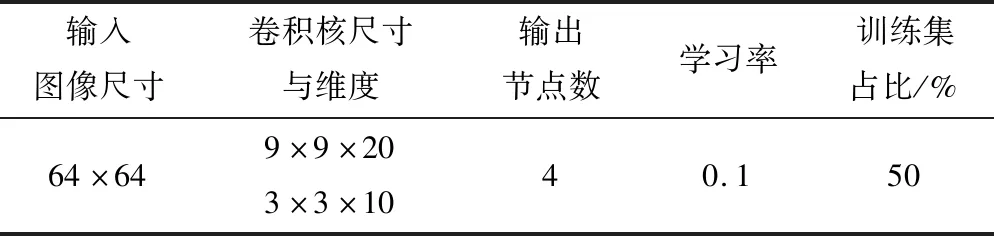
表1 CNN參數Tab.1 Parameters of CNN
(3)輸入不同運行狀態下的軸心軌跡圖對CNN進行訓練,訓練后的CNN用于提取圖像的特征向量,CNN全連接層節點值即為圖像特征向量P。
(4)將小波SVD提取的波形特征與CNN提取的軸心軌跡圖像特征組合成混合特征向量X=[S,P],并利用PNN進行分類,從而識別水電機組的工作狀態。
3 實驗結果與分析
3.1 信號采集與處理
本文以轉子實驗臺作為實驗對象,模擬水電機組運行過程中轉子可能出現的典型狀態,通過對實驗裝置在不同運行狀態下產生的信號進行特征提取與識別來驗證本文方法的有效性。本次實驗所用到的轉子實驗臺和信號采集裝置如圖4、5所示。信號采樣頻率為2 048 Hz,轉子轉速為1 200 r/min。該實驗裝置的傳感器包括兩個用于測量擺度的位移傳感器、一個用于測量轉速的轉速傳感器和一個用于測量振動的加速度傳感器。傳感器收集到的擺動和振動信號最終傳輸到計算機進行存儲、顯示和分析。
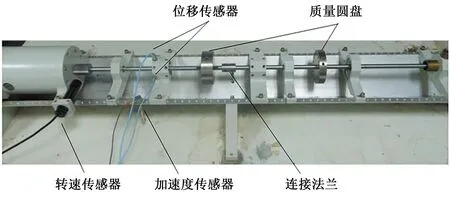
圖4 轉子實驗臺Fig.4 Rotor test bed
本實驗模擬的機組狀態包括正常、不平衡、不對中和碰磨4種狀態。其中,不平衡狀態通過在質量圓盤螺紋孔處旋入2 g 質量塊,產生不平衡離心力來實現。不對中狀態是指通過法蘭連接的兩條轉子軸線不在同一條直線上。將法蘭上的兩條軸錯開一定角度,即可模擬不對中狀態。碰磨是指在轉動過程中,轉子與其他部件發生碰撞或摩擦。通過擰緊碰磨螺栓使之與轉軸接觸可模擬碰磨狀態。各狀態下采集的擺度波形組數分別為350組、350組、210組和270組,每組信號長度為2 048個采樣點。對信號進行降噪處理,降噪后波形圖和對應的軸心軌跡如圖6所示。在本文中,由于軸心軌跡是由擺幅信號的多次組合疊加形成的,因此對軸心軌跡的識別和特征提取不存在初始點的選擇問題。

圖5 信號采集與實驗控制裝置Fig.5 Signal collection and experimental control device
3.2 特征提取
用離散小波變換對降噪后的擺度信號進行小波分解,分解小波基選用“DB8”小波,分解層數確定為4層。將分解得到的小波系數進行差值重構,重構后所得序列用于構造SVD輸入矩陣A,由于采樣點為2 048 個點一組,所以A∈C2048×5,根據式(9),存在酉矩陣U(U∈Cm×m)和酉矩陣V(V∈Cn×n),滿足:
(11)
式中:Σ=diag(σ1,σ2,…,σr),并且σ1≥σ2≥…≥σr>0,r=rank(A)=5。因此,σ1,σ2,…,σ5為信號的奇異值,即[σ1,σ2,…,σ5]為反映信號特征的奇異值向量,各狀態下的奇異值特征向量如表2、表3所示。
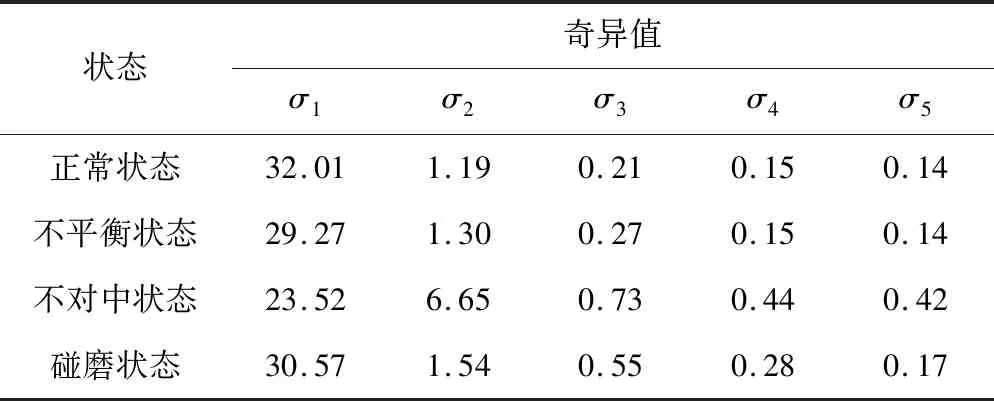
表2 不同運行狀態X向擺度信號經小波變換后提取的奇異值特征向量Tab.2 SV of swing signals(X-direction) extracted by wavelet transform
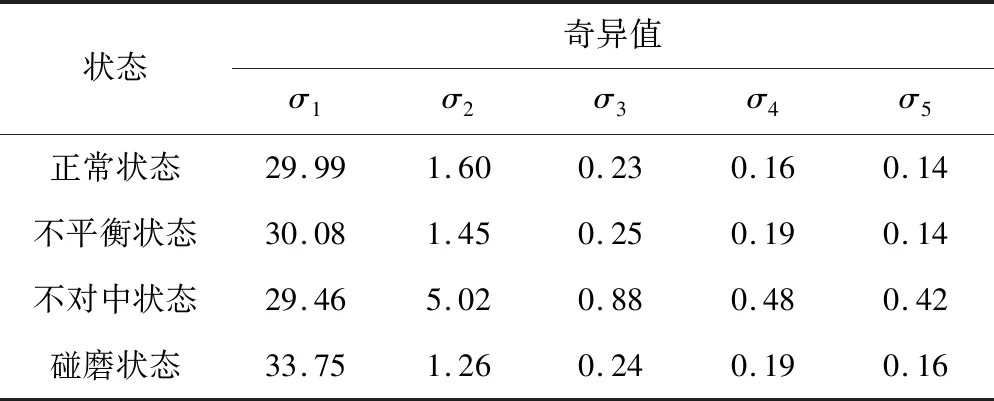
表3 不同運行狀態Y向擺度信號經小波變換后提取的奇異值特征向量Tab.3 SV of swing signals(Y-direction) extracted by wavelet transform
由圖6可知,不同運行狀態下水電機組的軸心軌跡存在明顯差異,這為使用CNN對軸心軌跡進行特征提取與識別提供了可能。本實驗隨機選取不同運行狀態下各50%的軸心軌跡圖像,輸入CNN進行訓練,另一半用于測試。CNN的特征提取數目是影響實驗結果的重要因素,不同特征提取數對CNN性能的影響如圖7所示。
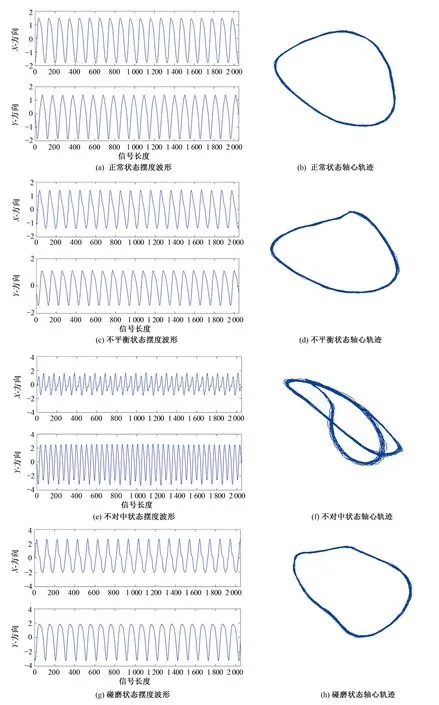
圖6 擺度信號與軸心軌跡圖Fig.6 Swing signal and shaft orbit
圖7中,CNN的特征提取數從10變到了100,可以看出,特征提取數不同會影響CNN的收斂性,當特征數在10到50之間時,收斂過程不穩定,當特征數在60到100之間時,收斂過程相對穩定。結合圖8可以看出,當特征提取數為90時,CNN具有更好的收斂性和更快的收斂速度,考慮到特征數進一步增多可能會導致過擬合問題,因此本文確定CNN的特征提取數為90。各狀態下CNN提取的軸心軌跡特征如表4所示。
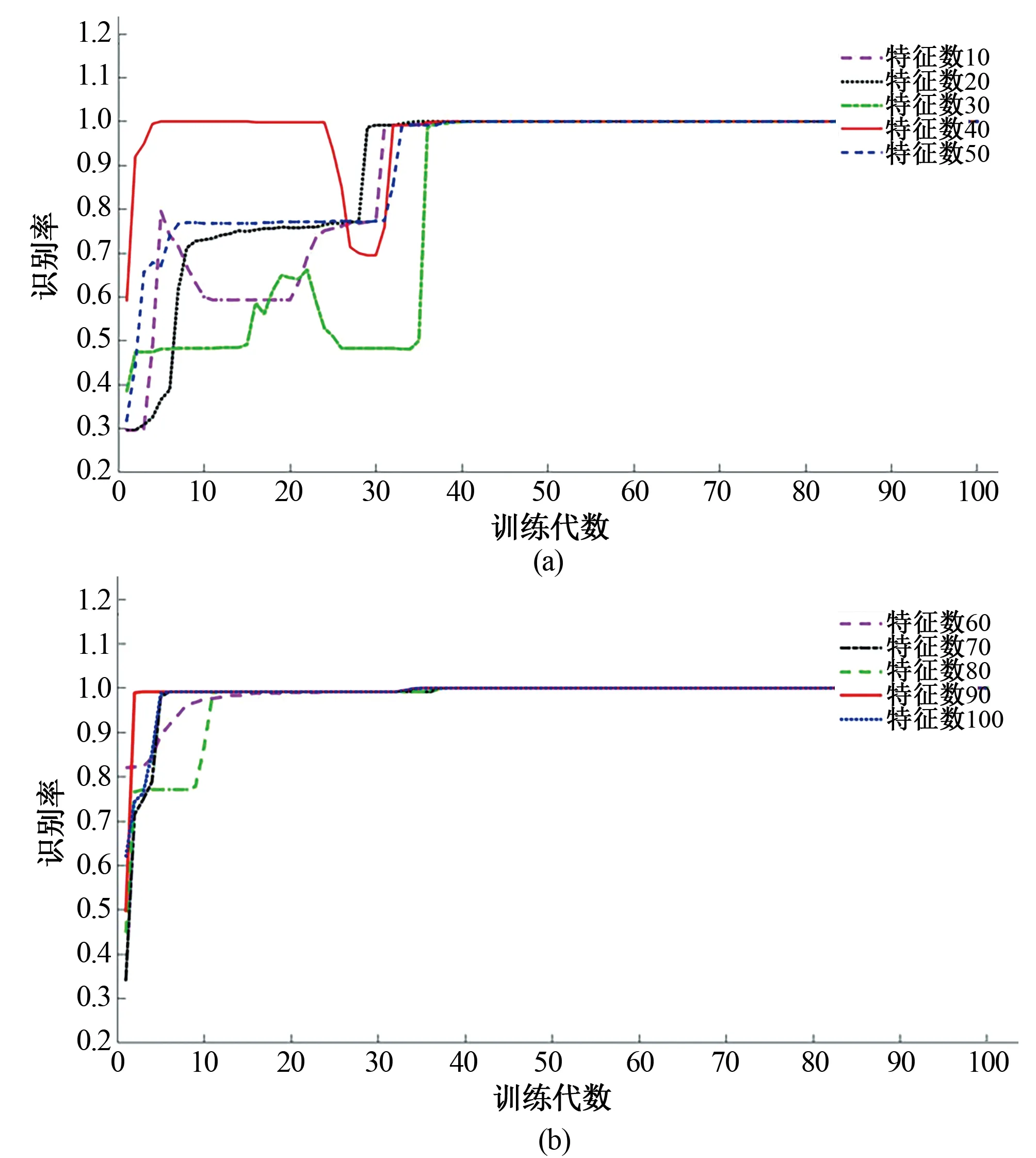
圖7 不同特征提取數下CNN識別率Fig.7 Accuracy of the CNN under different features
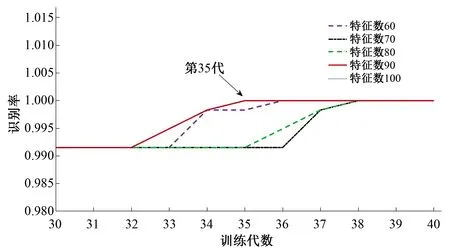
圖8 不同特征提取數下CNN識別率(局部放大)Fig.8 Accuracy of the CNN (Partial magnification)

表4 機組不同運行狀態軸心軌跡圖像特征向量Tab.4 Features of rotor shaft
利用訓練好的CNN提取軸心軌跡圖像的特征,將提取出的每張圖像的90個特征與SVD提取出的對應擺度波形的10個特征相結合,組成混合特征向量。每個混合特征向量的長度為100。為了避免不同特征向量的值存在較大差異,對所有特征向量進行歸一化處理。
3.3 實驗結果分析
本節將提取出的不同狀態的混合特征向量輸入到PNN中進行分類識別。PNN是基于數學統計原理的前饋型人工神經網絡,在模式識別領域,由于結合了徑向基神經網絡和經典概率密度估計理論,PNN相比傳統一些前饋神經網絡優勢明顯[12]。
按照與第3.2節相同的隨機規則,選取每種狀態下各50%的特征向量輸入PNN進行訓練,其余50%用于測試。通過試算法確定PNN的最優平滑系數為0.025。在不同的CNN訓練代數下,PNN通過混合特征向量對轉子實驗臺模擬的水電機組不同運行狀態的識別效果如圖9所示,可以看出,當CNN訓練到第7代時,PNN的識別率達到了100%。將該特征提取方法的分類和識別結果與CNN進行比較,如表5和圖10所示。
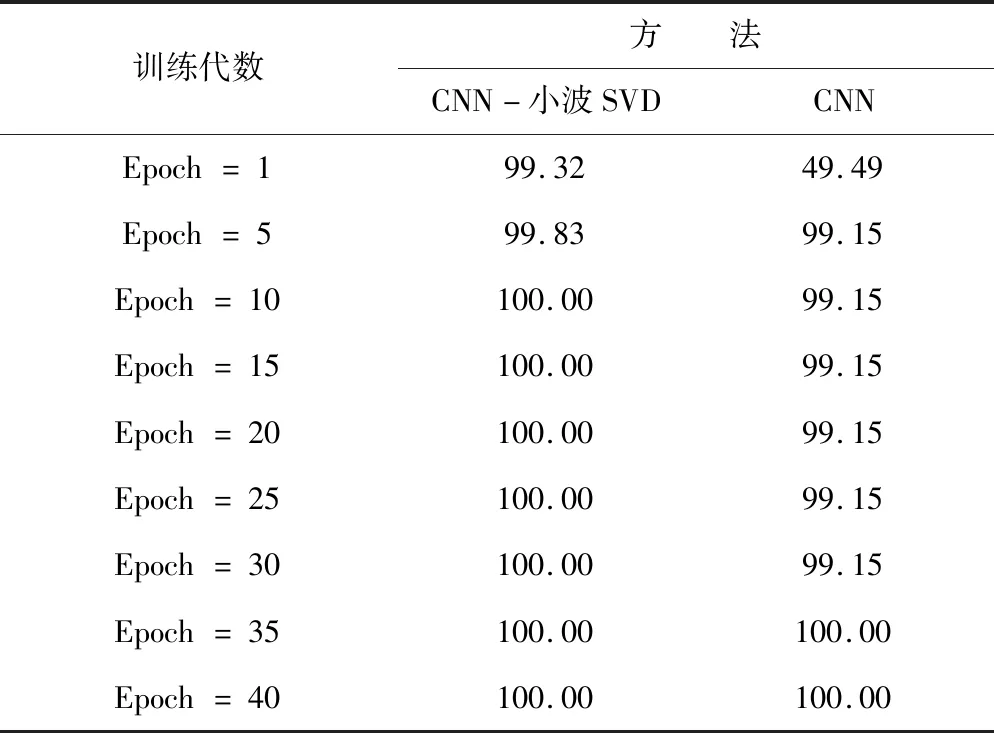
表5 CNN-小波SVD與CNN識別率 %Tab.5 Recognition rate of CNN-Wavelet SVD and CNN
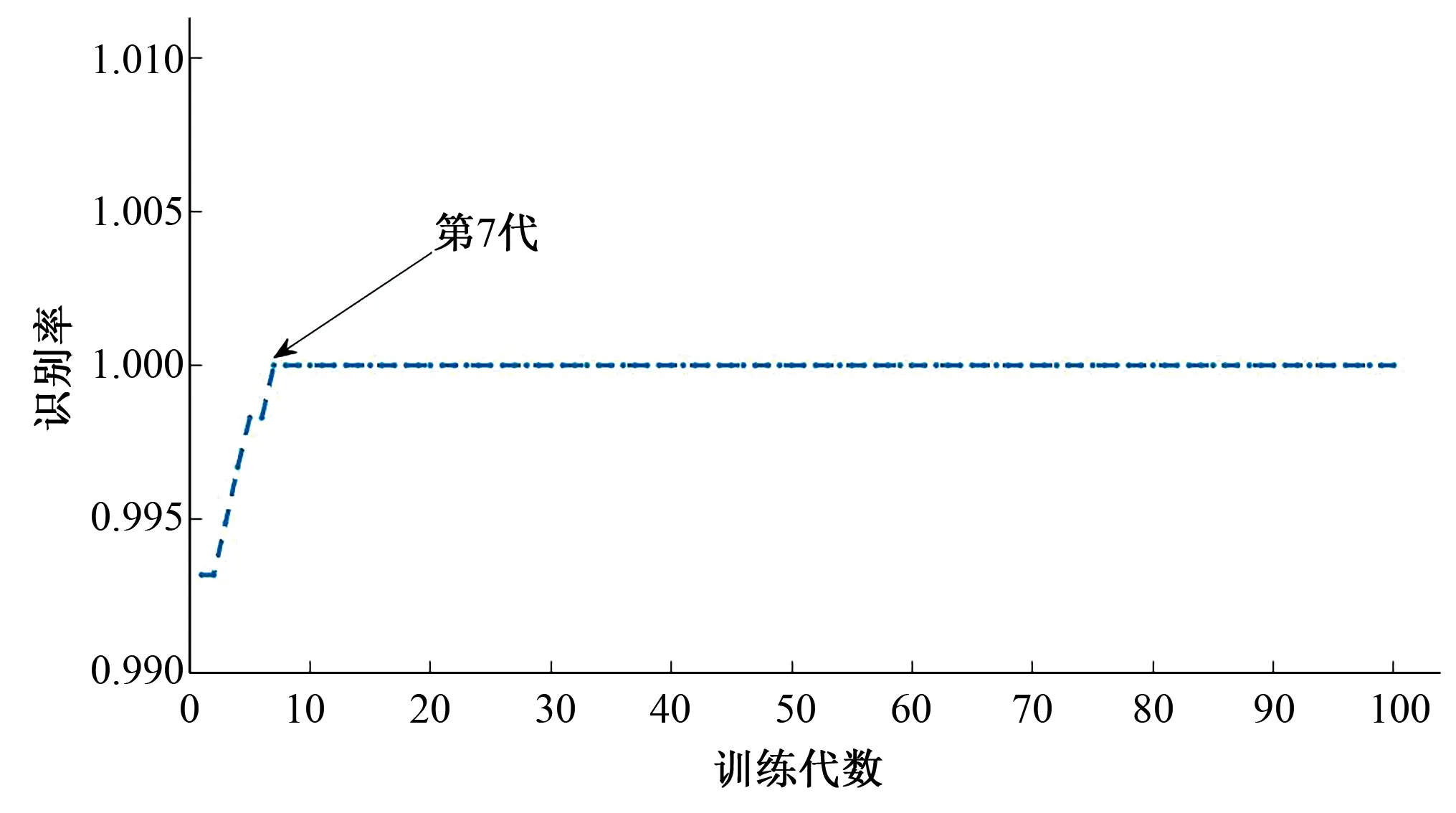
圖9 CNN-小波SVD識別率 Fig.9 Recognition rate of CNN-Wavelet SVD
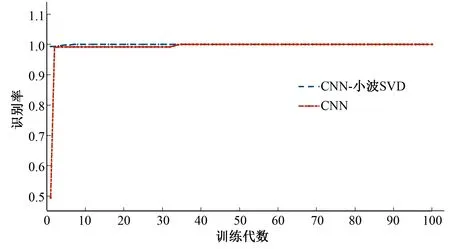
圖10 CNN-小波SVD與CNN識別率對比Fig.10 Recognition rate of CNN-Wavelet SVD and CNN
從表5和圖10可以看出,雖然CNN-小波SVD結合PNN的識別診斷方法與CNN識別診斷方法最后都能達到對轉子實驗臺各運行狀態100%的識別,但收斂速度上有很大差距,當CNN訓練到第7代時,PNN通過混合特征向量對不同運行狀態的識別率達到了100%,而傳統CNN則在第35代時實現了對各運行狀態100%的識別,說明CNN-小波SVD特征提取方法對CNN的訓練次數要求較少,且訓練次數相同的情況下識別率更高。因此可以得出,由于CNN-小波SVD特征提取方法在傳統CNN提取圖像特征的基礎上,加入了波形特征,與CNN僅靠軸心軌跡圖像特征識別相比,該方法提高了對水電機組不同運行狀態的識別率,對狀態故障的區分更為敏感,可以為水電機組故障診斷提供有效的依據。
4 結 論
本文提出了一種結合小波-奇異值分解與CNN的水電機組特征提取和故障診斷方法。用轉子實驗臺模擬水電機組運行狀態,利用小波-奇異值分解法提取擺度信號波形特征,CNN提取相應的軸心軌跡圖像特征。將提取出的不同狀態下的混合特征向量輸入PNN進行分類識別。相比于單一的依靠軸心軌跡圖像特征進行識別,融入了波形特征的混合特征向量則更能反映出水電機組的運行狀態,且對CNN的訓練次數要求更低,具有更低的時間成本和更高的準確性。
□
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
電子制作(2019年15期)2019-08-27 01:12:00
當代陜西(2019年10期)2019-06-03 10:12:04
電子制作(2018年11期)2018-08-04 03:25:42
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
中國生物醫學工程學報(2017年6期)2017-02-10 05:11:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
噪聲與振動控制(2015年4期)2015-01-01 07:08:21