基于改進蟻群系統算法與矢量和法的邊坡臨界滑動面搜索
2021-03-05 09:24:44張朝賢侯明勛葛修潤
中國農村水利水電 2021年2期
張朝賢,侯明勛,孫 紅,葛修潤
(上海交通大學 船舶海洋與建筑工程學院,上海 200240)
0 引 言
邊坡穩定分析問題一直是巖土工程領域的一個重要課題。在邊坡穩定分析中,臨界滑動面的確定是關鍵的研究內容之一,只有確定了滑動面,才能在其上分析計算安全系數[1]。近年來,隨著計算機技術的發展,智能優化算法逐漸展現出優越性,利用智能優化算法搜索邊坡臨界滑動面已成為主流方法[2]。所采用的智能優化算法包括:遺傳算法[3]、蟻群算法[4,5]、粒子群算法[6,7]、模擬退火算法[8]、帝國主義競爭算法[9]、黑洞算法[10]等。其中,蟻群算法具有良好的魯棒性、并行性和全局收斂性,對目標函數無特殊要求。蟻群算法的這些優點正好適合于解決復雜土坡滑動面搜索這一優化問題[5]。陳昌富等[11]通過引入混沌擾動算子增加構造的滑動面的多樣性,提高了蟻群算法搜索到臨界滑動面的概率;高瑋等[12,13]提出了獎懲蟻群算法、相遇蟻群算法來克服傳統蟻群算法搜索臨界滑動面效率低的不足;石露等[14]將蟻群算法與遺傳算法融合,形成優勢互補,增強了算法搜索臨界滑動面的能力。
但隨著問題復雜度的不斷增加,基本蟻群算法往往會出現搜索時間長、尋優效果不佳等不足。為了克服這一缺點,本文提出運用蟻群系統算法結合矢量和法來進行臨界滑動面的搜索工作。在蟻群系統算法的基礎上,本文通過引入分工機制和信息素平滑化機制來提高算法的全局尋優能力,使算法可以更好地避免早熟停滯,對解空間進行更充分地搜索。最后,通過兩個經典的邊坡算例和一個水庫岸坡對算法的可行性和適用性進行了檢驗。
1 邊坡抗滑穩定分析的矢量和法
葛修潤[15,16]深入探討了基于“強度折減”原則的抗滑穩定分析方法的不足之處,基于“力是矢量”的特性,提出了矢量和法。在得到邊坡的應力狀態分布后,矢量和法可采用顯式計算邊坡的抗滑穩定安全系數,無需迭代算法。根據矢量和法的定義,邊坡的抗滑穩定安全系數K為:
(1)
式中:∑R(θ)為沿潛在滑動面各點所能提供的極限抗滑力的總和;∑T(θ)為作用在潛在滑動面上的下滑力之和,這里的總和指的是力的矢量求和。
由于方向不同的矢量無法進行比值計算,所以在求解矢量和法安全系數時需要尋求一個合理的投影方向。根據“摩擦力方向和物體運動趨勢方向相反”的基本原理和“潘家錚最大最小”原理,葛修潤和郭明偉等[16-18]認為取邊坡的整體下滑趨勢方向進行投影是合理可行的。因此投影方向θ為:
(2)
式中:τfi為滑動面上的任一微段i處的極限抗滑力,一般采用Mohr-Coulomb準則作為巖土體強度特征,即τfi=ci+σitanφi,其中ci和φi為微段上巖土體材料的黏聚力和內摩擦角;Δli為微段的長度。
如圖1所示,作用在潛在滑動面上的下滑力之和在整體下滑趨勢方向上的投影為:
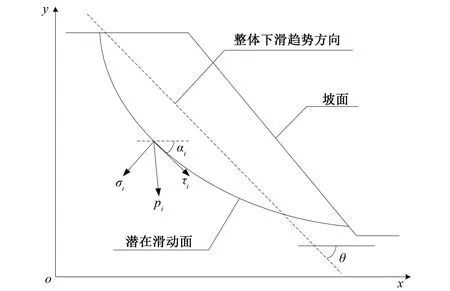
圖1 矢量和法安全系數求解示意圖Fig.1 Sketch for solving safety factor by the VSAM
(3)
式中:τi、σi是作用在微段上的剪應力和正應力;αi和θ分別是微段傾角和投影方向傾角(從x軸正向出發,順時針為負)。
而基巖沿潛在滑動面所能提供的總抗滑力在投影方向上的投影為:
(4)
于是,矢量和法定義下的安全系數可寫成:
(5)
2 搜索臨界滑面的改進蟻群系統算法
2.1 蟻群系統算法
蟻群算法是受螞蟻覓食行為啟發而設計的智能優化算法。算法中的人工螞蟻依據路徑上殘留的信息素強度,概率性地選擇下一步前進的路線,同時在經過的路徑上釋放信息素。在相同的時間內,越短的路徑上會積累越多的信息素,而信息素越高的路徑被選擇的概率會越高。通過這種自強化的正反饋機制,蟻群算法可以完成復雜的尋優任務。
蟻群系統算法[19](ant colony system,ACS)是從基本蟻群算法的基礎上發展改進而來,通過對狀態轉移策略和全局信息素更新規則的調整,以及局部信息素更新規則的引入,改善了算法的性能。下面結合滑動面搜索問題對蟻群系統算法進行簡單地介紹。
如圖2所示,將邊坡體離散化為一系列的狀態點,其中START點和END點是兩個虛擬點,作為人工螞蟻構建滑動面的起點和終點。離散的精度可根據問題的需要和計算能力進行調整。

圖2 邊坡離散及滑動面搜索示意圖Fig.2 Discrete slope and search for slip surface
在每次循環中,m只人工螞蟻從START點出發,按照狀態轉移策略選擇入口區內的一點,然后重復應用狀態轉移策略逐步向前,最終到達END點,構建一條滑動面。
對于t時刻處于r條分線上第i個狀態點(點e)上的螞蟻k,將根據下式的偽隨機比例策略選擇下一狀態點:
(6)
式中:q為[0,1]區間內均勻分布產生的隨機數;q0為一個參數(0≤q0≤1);allow為螞蟻k下一步可訪問的節點集合;J為根據下式得到的概率分布產生的一個隨機變量:
(7)
式中:τ(e,f)為路徑(e,f)上的信息素強度,一般初始時刻假定各路徑上的信息素強度相等τ0=C(C為某個常數);η(e,f)為路徑上的信息素能見度;α和β反映了上述兩者在路徑選擇中的相對重要程度。
在構建滑動面的過程中,螞蟻每完成一段路徑的構建,將運用局部更新規則來修改該段路徑上的信息素強度:
τ(e,f)=(1-λ)τ(e,f)+λ·τ0
(8)
式中:λ為類似信息素揮發因子的一個參數(0≤λ≤1)。在所有人工螞蟻均完成滑動面的構建后,將應用全局更新規則對路徑上的信息素強度進行修改,蟻群系統算法只允許全局最優的螞蟻釋放信息素:
τ(e,f)=(1-ρ)τ(e,f)+ρ·Δτ(e,f)
(9)
式中:ρ為信息素揮發因子;Δτ(e,f)為信息素增量,對于目前所有循環中搜索到的最小安全系數Fs,global對應的滑動面路徑取1/Fs,global,其余路徑取0。
2.2 改進的蟻群系統算法
蟻群系統算法中的偽隨機比例狀態轉移策略和全局信息素更新規則,可以使算法的搜索活動快速地集中到幾條較優路徑的附近,但是這種搜索方式也更容易誘發早熟停滯的現象,使得算法收斂于局部極值。為了提高蟻群系統算法的全局搜索能力,本文引入了螞蟻分工機制和信息素平滑化機制來對算法進行改進。
(1)螞蟻分工機制。現實中的螞蟻是一種社會性昆蟲,蟻群之間具有明確的分工。在蟻群算法改進中對螞蟻進行分工,稱之為具有分工的蟻群算法,如在旅行商問題(traveling salesman problem,TSP)求解中螞蟻從不同的頂點出發,相當于這些螞蟻根據出發的頂點的不同進行分工[20]。受此啟發,本文在搜索滑動面的蟻群系統算法中引入分工的思想,每次迭代循環的初始時刻在入口區的每個節點上各放置m只螞蟻,依據出發點的不同對螞蟻進行分工,然后螞蟻繼續按照2.1節中的狀態轉移策略逐步向前,構建滑動面。
蟻群系統算法中的信息素更新規則對不同階段的路徑采用了相同的信息素增量,沒有考慮到不同階段路徑間的差異。在邊坡滑動面搜索模型中,從START點到入口區的初始階段的路徑被選擇的頻率遠高于之后的路徑,所以相較之下其上的信息素強度變化最為劇烈,容易導致螞蟻過早地從集中的某條或某幾條路徑進入入口區,很有可能使得算法從一開始就陷入一個只具有局部極值的搜索空間。為了有效避免上述情況的發生,本文通過螞蟻分工機制來保持算法搜索的多樣性。
(2)信息素平滑化機制。基于自強化反饋機制的蟻群系統算法會使路徑上的信息素量逐漸呈現差異化,經過多次迭代后螞蟻會集中在當前最好的路徑附近,而此時其他路徑上的信息素強度很小,這樣容易使得算法一旦陷入局部極值就很難跳出,出現搜索停滯的現象。對此,本文引入了信息素平滑化機制對算法進行改進,即當算法連續N次循環得到的最小安全系數都沒有變化時,則通過下式對各路徑上的信息素強度進行平滑化處理:
(10)

通過信息素平滑化的處理,削弱了各路徑之間的信息素強度差異,提高了算法探索新解的可能,有助于算法跳出局部極值,避免搜索陷入停滯。
本文以矢量和法計算得到的抗滑穩定安全系數作為目標函數,采用上述改進的蟻群系統算法來搜索邊坡的臨界滑動面,具體的流程如圖3所示。為了提高滑動面搜索的效率,根據文獻[12,13]的經驗,對滑動面的構建過程進行如下的一些約束:①滑動面的狀態點處于坡表面與底界面(如基巖、硬土層等)之間;②滑出段的傾角取在0°~45°之間;③一般情況下,邊坡的滑動面呈凹形,即相鄰微段的傾角滿足:αi-1≤αi;④邊坡的滑動面一般較為光滑,相鄰微段傾角的差值不會過大:αi-αi-1≤Δα。
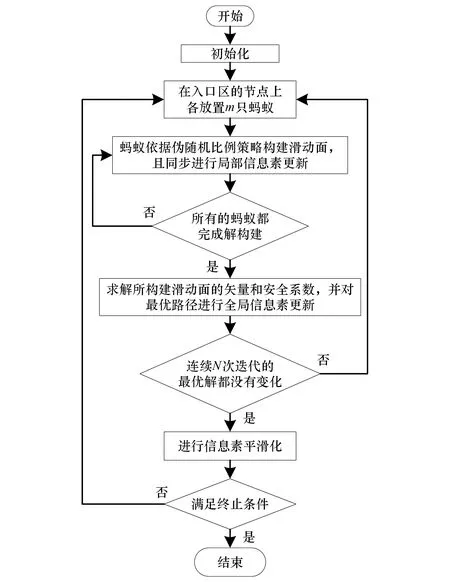
圖3 改進蟻群系統算法搜索臨界滑動面流程圖Fig.3 Flowchart of the improved ant colony system algorithm for searching a critical slip surface
3 算例分析
為了檢驗本文算法的可行性,并評估所搜索到的臨界滑動面的質量,選取了澳大利亞計算機應用協會(ACADS)設計的兩道經典考核題[21]EX1(a)和EX1(c)作為案例進行了計算分析,并以推薦的裁判答案作為標準對搜索結果進行評價。在下列邊坡案例分析中,本文算法中的參數取值如表1所示。

表1 改進蟻群系統算法中的參數取值Tab.1 The parameter values of the improved ACS
3.1 算例一
考核題EX1(a)的計算模型和關鍵點的坐標如圖4所示,有限元計算的邊界條件為底部固定,兩側面法向約束,邊坡巖土體材料的物理力學強度參數見表2。邊坡離散狀態點的水平間距為1.0 m,豎向間距為0.1 m。

表2 ACADS考題EX1(a)材料參數Tab.2 Material parameters of EX1(a) of ACADS
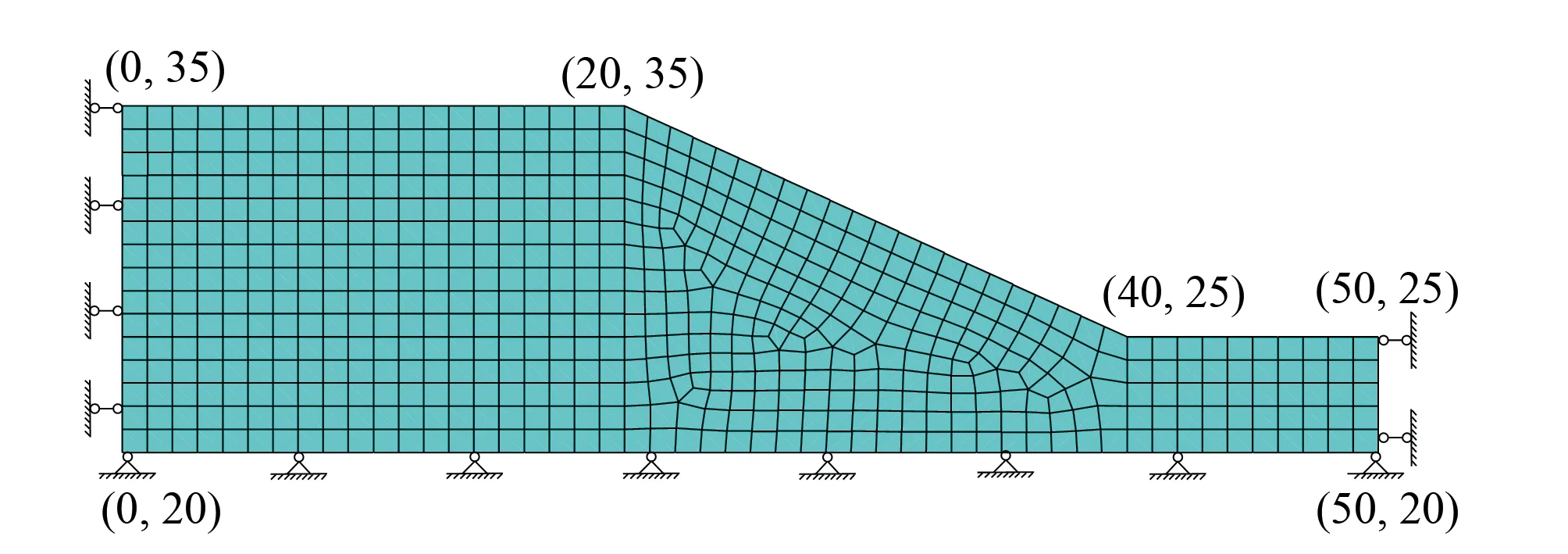
圖4 ACADS考題EX1(a)計算模型(單位:m)Fig.4 Model of test problem EX1 (a) of ACADS
為了對比分析,分別給出了本文算法、基本蟻群算法(ant system,AS)和蟻群系統算法運行30次所得的結果,安全系數計算結果見表3,圖5給出了安全系數最小值所對應的滑動面位置。從圖5中可以看出以上算法搜索到的滑動面位置均在參考滑動面附近的合理范圍之內,其中本文算法的搜索結果與參考滑動面非常接近。本例推薦的裁判答案為1.000,為了增加可對比性,對裁判程序給出的滑動面也求解了矢量和法安全系數,計算結果為0.987,而本文算法所得的最小安全系數為0.981,二者相差非常小。可見本文算法在均質邊坡的滑動面搜索問題中是適用的,且有很好的尋優能力。
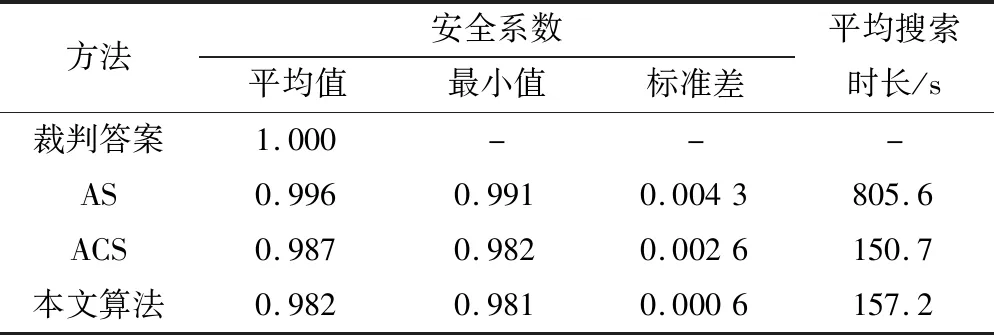
表3 考題EX1(a)搜索結果對比Tab.3 Comparison of the searching results of EX1(a)
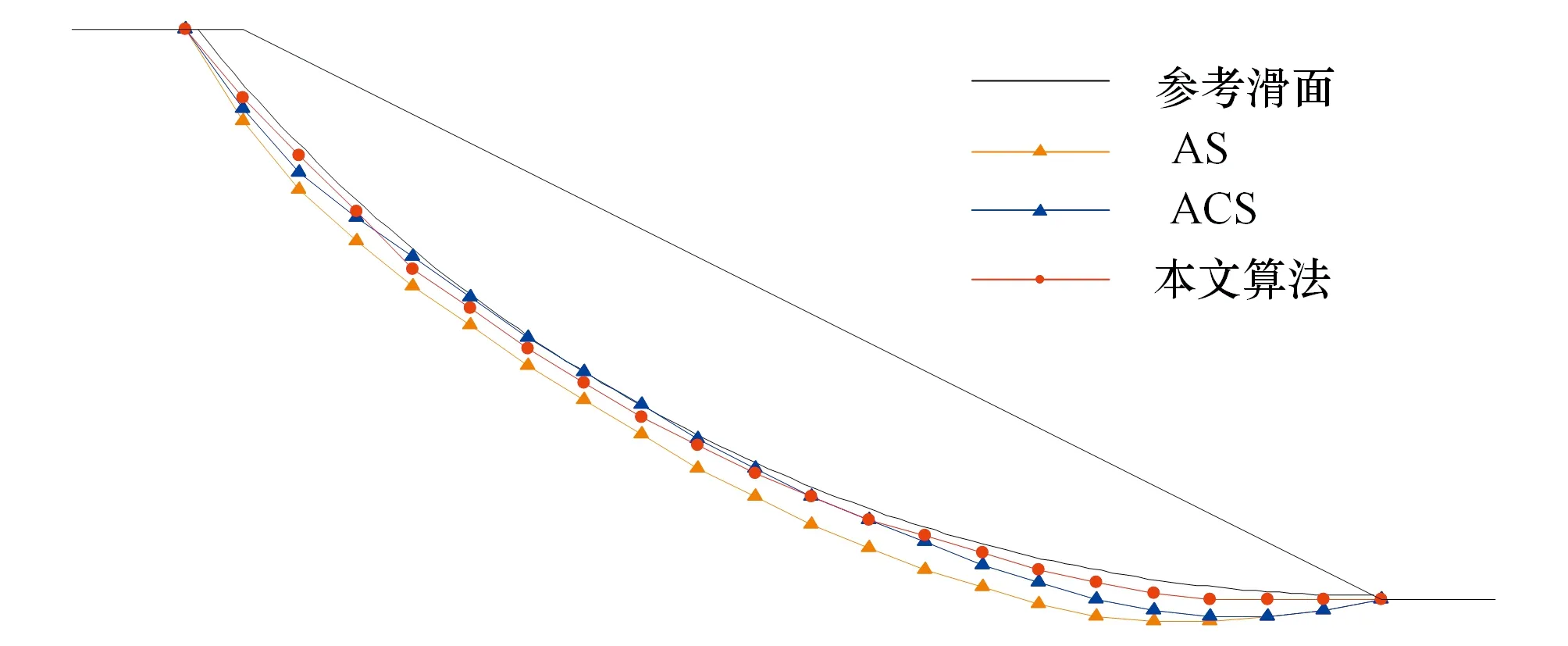
圖5 考題EX1(a)的滑動面搜索結果Fig.5 Searching results of the slip surfaces of EX1 (a)
從表3中各算法搜索時長的對比,可以看出本文算法和蟻群系統算法在搜索效率上相較于基本蟻群算法有較大的提升。從安全系數的計算結果看,本文算法得到了更小的平均值和最小值,且標準差只有0.0006,說明了本文算法具有更好的全局收斂性和魯棒性。如圖6所示,為本文算法和蟻群系統算法在求解過程中的最小安全系數收斂曲線,可以看出兩種算法在迭代50次左右就趨于最優值附近,而本文算法由于改進機制的引入,使得算法可以不斷跳出停滯,有更大的概率發現更好的解。
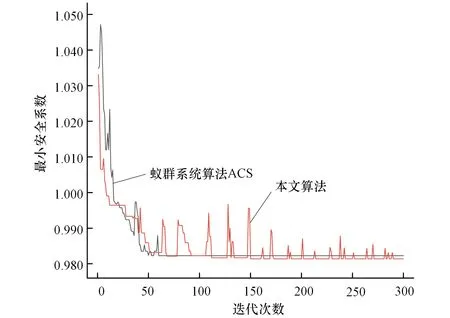
圖6 最小安全系數收斂過程Fig.6 Convergence process of the minimal safety factor
3.2 算例二
如圖7所示,考核題EX1(c)是由3個不同土層構成的非均質邊坡,具有多個局部極值,對算法的尋優能力提出了更高的要求。邊坡各土層材料的物理力學參數見表4。在本例的分析中,有限元計算的邊界條件、蟻群系統算法的參數設定和邊坡體離散點的間距同算例一。
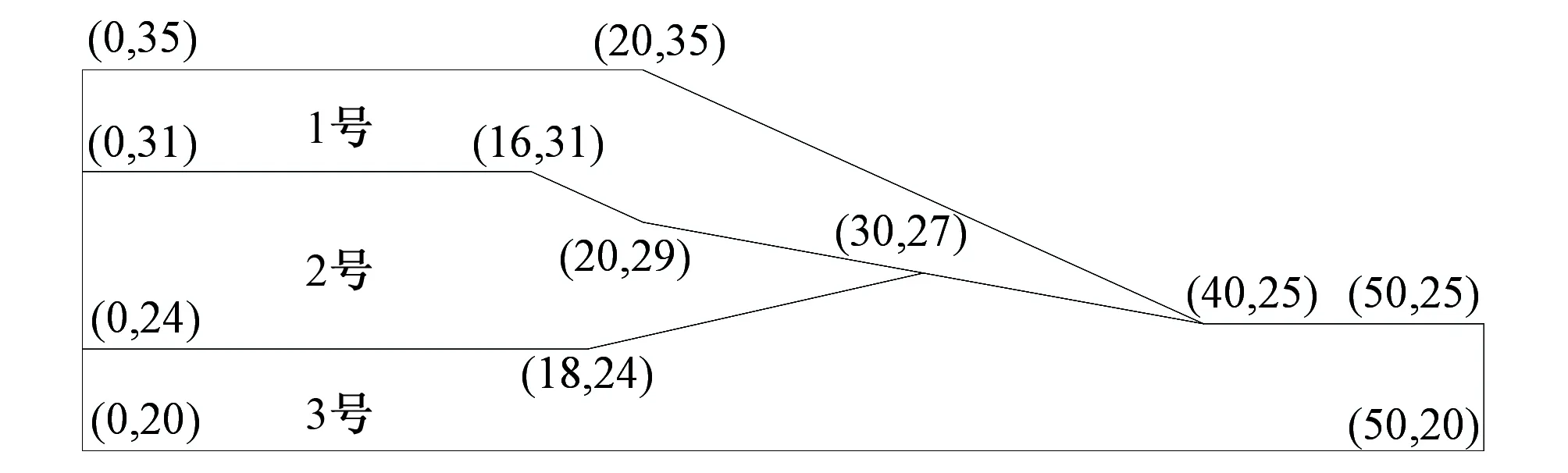
圖7 ACADS考題EX1(c)邊坡剖面(單位:m)Fig.7 Slope profile of testing problem EX1(c) of ACADS
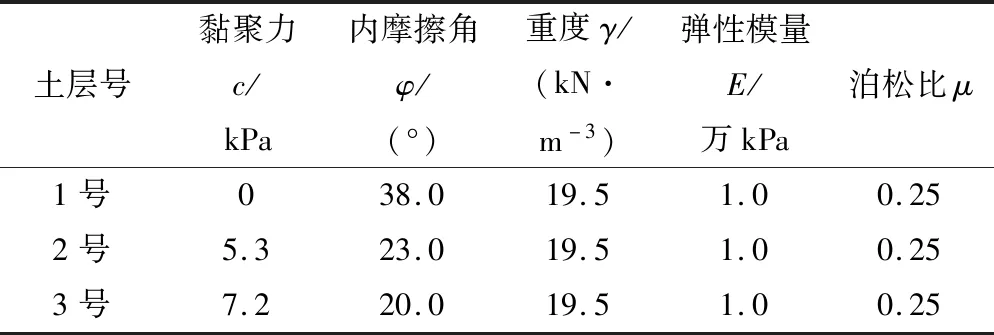
表4 ACADS考題EX1(c)材料參數Tab.4 Material parameters of EX1(c) of ACADS
本考題推薦的裁判答案為1.390,采用裁判程序推薦的滑動面進行矢量和法安全系數計算的結果為1.359,采用本文算法搜索到的最小安全系數為1.354,其對應的滑動面的形狀和位置如圖8所示,與參考滑動面非常接近,說明本文算法可以搜索到比較合理的臨界滑動面。從表5給出的3種算法運行30次的計算結果對比中,可以看出相較于AS算法和ACS算法,本文算法得到了更小的安全系數,且標準差最小。從圖8算法搜索到的最小安全系數對應的滑動面位置對比中,可以看出本文算法搜索到的滑動面位置與參考答案最為接近,搜索結果的對比分析體現了本文算法的優越性。
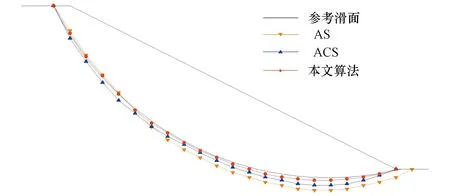
圖8 考題EX1(c)的滑動面搜索結果Fig.8 Searching results of the slip surfaces of EX1(c)
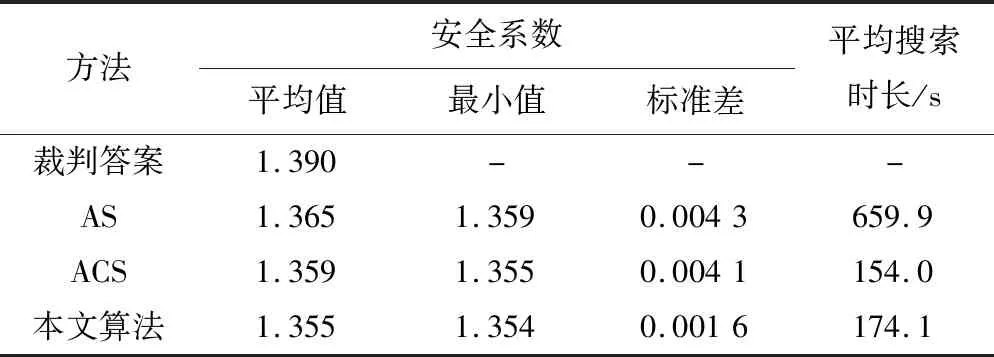
表5 考題EX1(c)搜索結果對比Tab.5 Comparison of the searching results of EX1(c)
3.3 工程算例
為了對本文算法的工程適用性進行探究,運用本文算法對云南阿海水電站左岸近壩段堆積體邊坡進行了分析。該堆積體邊坡位于壩址區金沙江上游左岸,距壩軸線最近約400 m,規模較大,體積約470 萬m3,前后緣高差近200 m,最大深度近50 m,堆積體上部為穩定性相對較好的冰磧物,底部高程為穩定性較差的古河床沖積層,天然情況下處于穩定狀態。

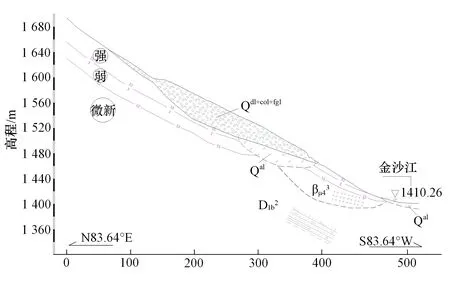
圖9 堆積體邊坡b6剖面地質構造圖(單位:m)Fig.9 Geological structure of the deposit slope for section b6
表6 堆積體邊坡巖土層材料參數Tab.6 Material parameters of stratum for deposit slope
在本工程邊坡滑面搜索過程中,有限元計算的邊界條件和算法的參數設定同算例一,邊坡離散點的精度取為:水平間距8 m,豎向間距1 m。如圖10所示為臨界滑動面的搜索結果,其中本文算法所搜索到的滑動面的矢量和安全系數為1.332,而AS算法和ACS算法搜索到的滑動面所對應的矢量和安全系數分別為1.449和1.351。為了對搜索結果的準確性進行驗證,也給出了GEO-SLOPE軟件利用Morgenstern-Price (M-P)法搜索計算得到的圓弧滑動面,其相應的安全系數為1.328。從安全系數計算結果上看,本文算法所得結果與GEO-SLOPE軟件計算結果的相對誤差僅為0.3%,而AS算法和ACS算法與其相對誤差為9.1%和1.7%;從滑動面的形狀和位置看,本文算法搜索到的滑動面與GEO-SLOPE軟件搜索結果十分接近,證明本文算法給出了一個合理的滑動面搜索結果,可以較好地解決這一工程邊坡的臨界滑動面搜索問題,且相較于AS算法和ACS算法,本文算法具有更好的搜索效果。
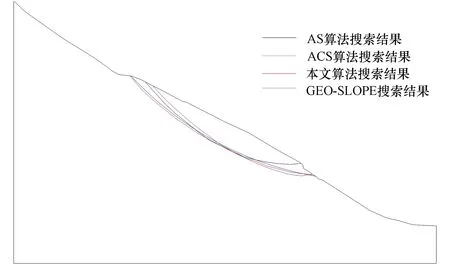
圖10 堆積體邊坡臨界滑動面搜索結果Fig.10 Searching results of critical slip surface of the deposit slope
4 結 論
本文基于改進的蟻群系統算法,結合矢量和法對邊坡任意形狀臨界滑動面搜索問題進行了研究,得到如下結論。
(1)通過引入螞蟻分工機制和信息素平滑化機制來對蟻群系統算法進行改進,削弱了各路徑之間的信息素強度差異,提高了算法探索新解的可能,有利于算法跳出局部極值,避免算法陷入停滯,使本文算法具有更好的全局收斂性和魯棒性。
(2)采用本文搜索算法對ACADS的兩道經典考題進行了分析,結果表明本文算法得到的最小安全系數和臨界滑動面的位置與裁判推薦答案十分接近,證明了本文算法的可行性和準確性。
(3)將本文算法應用于阿海水電站左岸壩前堆積體邊坡工程實例,所搜索到的臨界滑動面與GEO-SLOPE軟件利用M-P法搜索計算給出的滑動面位置基本吻合,兩者所得安全系數的相對誤差僅為0.3%,說明本文算法具有良好的工程適用性。
□
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32