海洋地震拖纜拉力采集電路研究
2021-03-08 01:38:08馬曉偉黃龍君胡勇于強
電子技術與軟件工程 2021年23期
馬曉偉 黃龍君 胡勇 于強
(中海油田服務股份有限公司 天津市 300451)
1 引言
拖纜在水下進行地震數據采集作業過程中,由于拖纜自身重量、長度和在水中的阻力等因素,拖拽受力比較大[1-2],6KM二維采集作業情況下,拖纜受力約在10KN~15KN之間。拖纜受力大小能夠間接反映出拖纜在水下的姿態,分析拖纜可能出現的問題,如掛漁網、斷裂等,當拖纜出現掛網或被其他物體纏繞時,不僅影響地震數據采集增大噪聲,嚴重時拖纜斷裂。
拉力采集電路能夠實時監測拖纜受力情況,面對以上問題可以及時作出相應對策,減小不必要的損失。拉力采集段由拉力采集電路和拉力傳感器構成,本課題基于自主研制拖纜地震采集系統,設計研發一套拉力采集電路,研究分析拉力采集電路和傳感器的線性關系,并對拉力采集電路和傳感器進行標定,實現拉力數據實時采集[3]。
2 拉力采集電路及傳感器
拉力采集電路實時的將拉力傳感器輸出的電壓信號經過放大、模數轉換成十六進制數碼傳輸給拉力段,然后由水上系統解析得到相應的拉力值信息[4]。圖1為拉力采集電路結構圖,拉力傳感器感受到拖纜外界拉力后,將拉力信號轉換成微弱電平信號傳輸給拉力采集電路,電路對微弱電平進行放大和模數轉換生成一個16bit的數據流,之后傳輸到數字包傳輸板,傳輸板對數據進行封裝同地震數據一起傳送到水上系統進行解析,水上室內系統經過解析之后將拉力值實時顯示在工作站界面上。
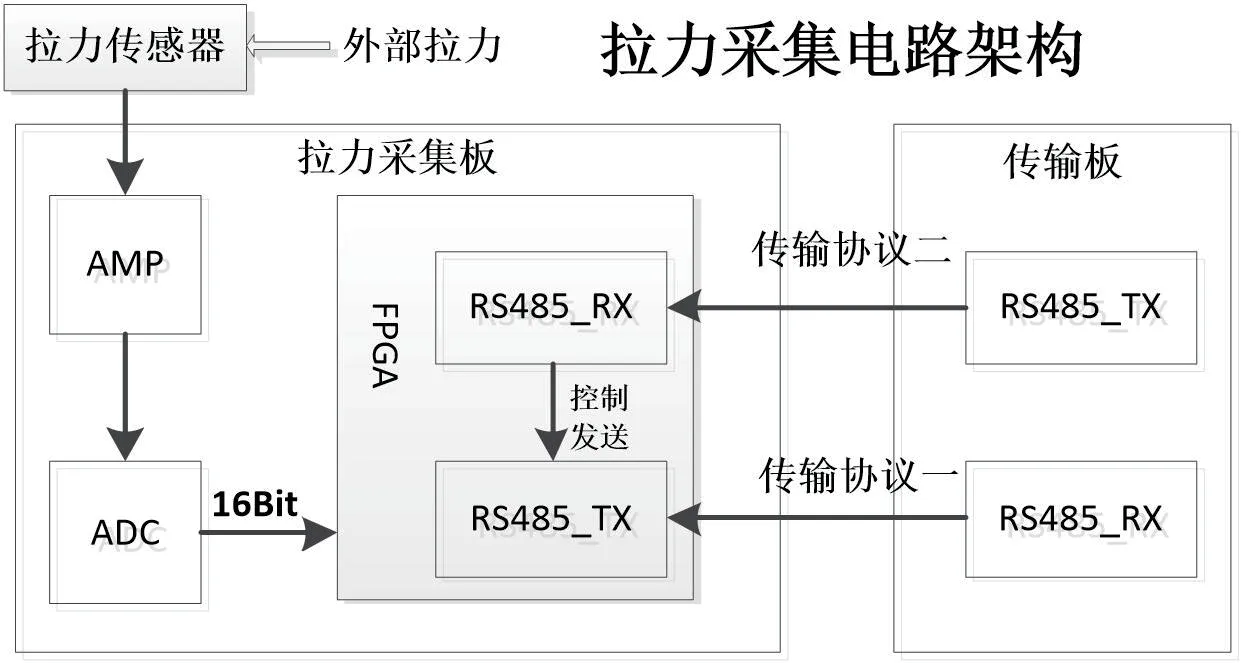
圖1:拉力采集電路結構
采集電路放大器采用的是由儀表放大器和同相比例放大器共同組成的二級放大結構,采集電路輸入差模信號經過儀表放大器放大128倍,傳遞給同相比例放大器再進行6.5倍放大,最終實現拉力采集電路815倍信號放大[5]。
3 拉力采集電路標定
3.1 傳感器線性分析
基于自主拖纜地震采集系統,模擬拖纜工作段在采集作業過程中的受力情況,給傳感器施加拉力,測試傳感器在不同拉力值下,輸出差模信號與拉力值的線性關系,其中拉力間隔為5KN,表1為不同拉力值對應的拉力傳感器輸出信號值。由表1可以看出,拉力傳感器的輸入拉力值與輸出信號值具有很好的線性關系,因此每間隔5kN取一個拉力值進行測試標定符合實際情況。
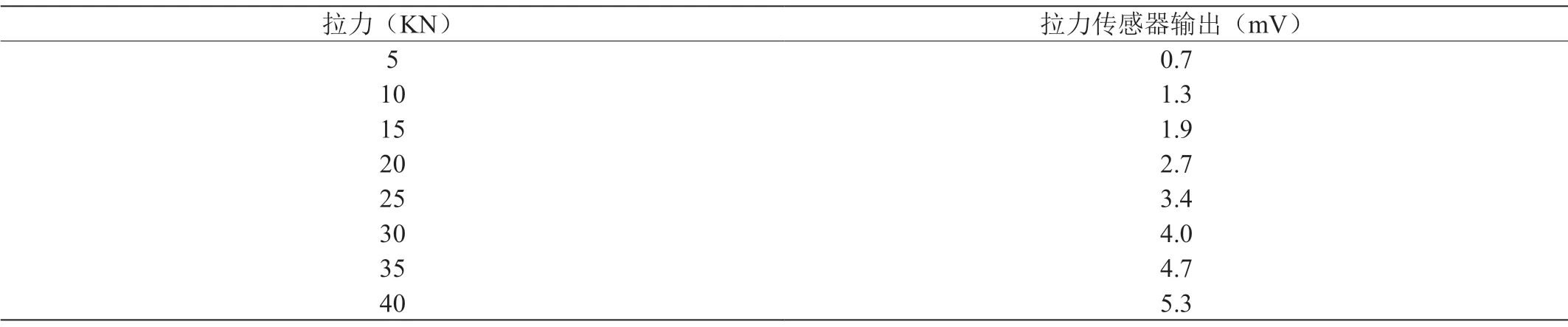
表1:拉力傳感器輸出信號
3.2 拉力采集電路標定
拉力采集電路標定的原理為:在不同拉力值下,拉力傳感器輸出差模信號值即拉力采集電路輸入信號,經過放大、ADC模數轉換之后,分析比較不同拉力采集電路之間的一致性[6]。針對同一傳感器,選取2塊拉力采集電路對其進行標定。傳感器序列號為5006,將拉力采集電路分別命名為T1、T2,標定時,拉力值范圍為5KN~40KN,每間隔5KN測試傳感器輸出和拉力采集電路輸出值,其中拉力值誤差小于10N。表2為測得T1、T2拉力采集電路對應同一拉力傳感器差模信號輸出值與ADC輸出信號值。
由表2可以看出在相同拉力值情況下,拉力傳感器輸出的差模信號基本一致,經過拉力采集電路兩級放大之后,T1與T2的ADC輸出信號絕對差值小于25mv,最大誤差率為0.5%左右,誤差較小;經計算可得T1拉力采集電路放大倍數為808倍,T2拉力采集電路放大倍數為815倍,兩塊拉力采集電路放大倍數比較接近于,誤差處于允許接收范圍之內,分析可得,經過標定之后拉力采集電路的一致性比較好。

表2:T1,T2拉力傳感器差模信號輸出與拉力采集電路輸出值
3.3 一致性分析
通過3.1對拉力采集電路標定我們可以看出對于同一拉力傳感器,不同拉采集版的一致性比較好,誤差在可接受的范圍之內,滿足海上勘探作業過程中拉力采集需求。下面我對同一拉力采集電路不同傳感器之間的一致性進行分析。選取拉力采集電路命名為T3,傳感器型號為5005和5006,拉力值范圍為5KN~40KN,每間隔5KN測試傳感器輸出和拉力采集電路輸出值,其中拉力值誤差小于10N。表3為拉力傳感器對應的拉力采集電路的ADC輸出值,圖2為拉力傳感器5005、5006差模信號輸出與拉力采集電路ADC輸出關系,其中y1為5005擬合曲線關系,y2為5006擬合曲線關系。
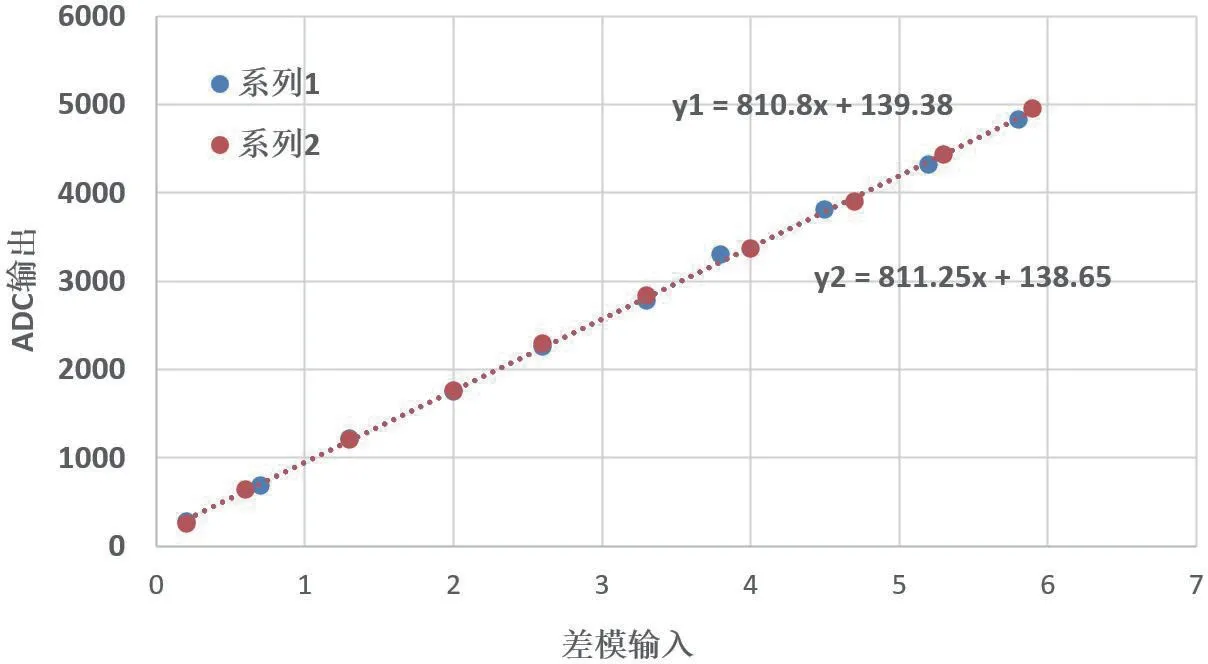
圖2:差模輸入與ADC輸出關系
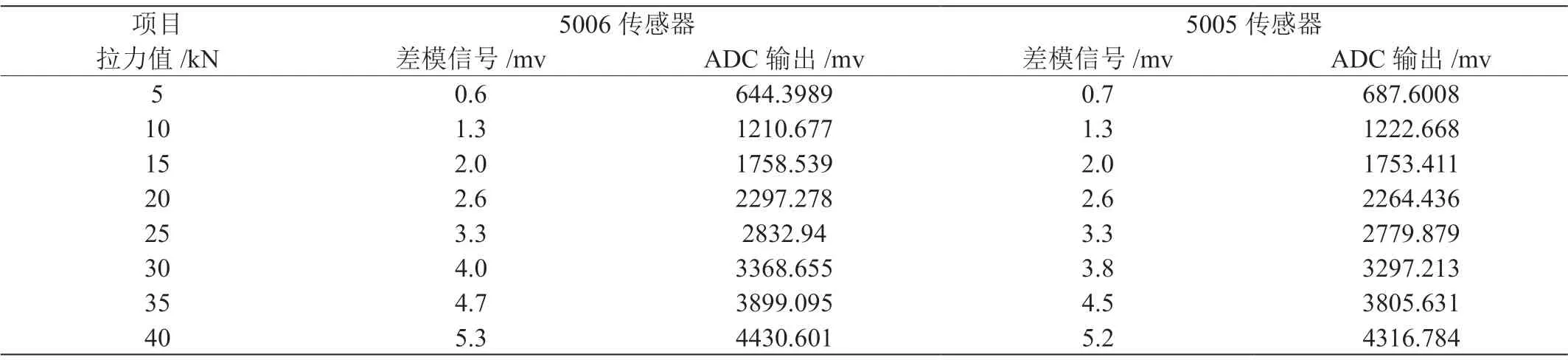
表3:不同傳感器對應ADC輸出
由表3可以看出,在相同拉力值情況下,傳感器5005和5006差模輸出值基本相同,誤差很小,經過拉力采集電路放大、模數轉換之后,ADC最大輸出值誤差在2.5%左右;圖2顯示差模輸出信號經過拉力采集電路放大、擬合之后的線性關系基本一致,說明5005和5006拉力傳感器的一致性比較好,特別是在10KN~25KN范圍內曲線基本重合,滿足自主拖纜地震采集系統海上作業時受力需求。
4 結束語
本文基于自主拖纜地震采集系統,設計研究一套拉力采集電路,對拖纜受力情況進行實時監控,模擬拖纜工作段作業過程中受力情況,對拉力采集電路和拉力傳感器進行試驗標定,同時對同一拉力傳感器不同拉力采集電路,以及不同傳感器同一拉力采集電路的一致性進行分析。結果顯示標定后的拉力采集電路一致性很好,滿足拉力采集電路設計要求,能夠實時監測拖纜受力情況,誤差在可允許接受的范圍之內;同一拉力傳感器輸入與輸出線性關系,以及不同傳感器之間一致性效果比較好。由此可見標定后的拉力采集電路與傳感器能夠準確的實時監測拖纜受力情況,基本能夠滿足拖纜采集系統海上作業需求。
猜你喜歡
公民與法治(2022年5期)2022-07-29 00:47:28
教學考試(高考物理)(2021年5期)2021-11-08 10:31:22
歷史教學問題(2021年4期)2021-11-05 07:02:34
中醫眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
中國公共安全(2017年11期)2017-02-06 05:28:08
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
燕山大學學報(2015年4期)2015-12-25 02:19:49
