基于駕駛實踐的無人船智能避碰決策方法
2021-03-08 02:49:28丁志國張新宇王程博黎泉安蘭軒
中國艦船研究 2021年1期
丁志國,張新宇*,王程博,黎泉,安蘭軒
1 大連海事大學 航海動態仿真與控制交通行業重點實驗室,遼寧 大連 116026
2 大連海事大學 航海學院,遼寧 大連 116026
0 引 言
隨著新一代人工智能技術和無人駕駛技術在航海領域的興起,海上運輸正朝著智能化方向快速發展。無人駕駛船舶作為海上智能交通的載體,已成為國內外航運界關注的焦點。近年來,無人駕駛車輛的智能避碰決策已取得較好成果,國內外許多專家學者積極借鑒無人駕駛車輛的經驗,結合航海背景,試圖解決船舶的智能避碰決策問題。
無人駕駛船舶自主航行包括感知、理解、決策、控制4 個階段,而決策階段是無人駕駛船舶安全航行及避障的關鍵,因此無人駕駛船舶的智能避碰決策成為國內外學者的研究重點。無人駕駛船舶智能避碰決策問題的核心在于能否在海上環境復雜、多變的情況下快速做出符合《國際海上避碰規則》(以下簡稱《規則》)以及海員通常做法的安全而有效的決策。實際上,船舶智能避碰決策要解決的實際問題與船舶駕駛人員在避碰實際中要解決的問題是一致的,區別在于是用人工方式解決還是由計算機自主做出決策,而目前基于駕駛實踐視角的無人船智能避碰決策研究較少,本文擬從駕駛實踐的視角開展無人船的智能避碰決策研究。
基于駕駛實踐,無人駕駛船舶智能避碰決策包含航行態勢感知、航行態勢理解、碰撞危險度決策、避碰行動時機決策、避碰行動有效性決策和復航決策等過程。
航行態勢感知系統是借助多種船載傳感器設備主動對船舶內、外部信息以及航行環境信息進行多模態感知。
航行態勢理解是通過對感知系統獲取的多源異構、多模態信息進行分類與理解,將無人駕駛船舶的航行態勢進行結構化表述,并結合《規則》與海員的通常做法對船舶會遇場景進行量化劃分。目前,對于會遇場景的劃分標準不一。陳國權[1]根據相對運動幾何規律分析總結了目標交會特征(TEC),通過目標船相對運動航向、船速比的大小以及目標船與本船的航向差取值范圍歸納出了15 種TEC,并針對不同的TEC 給出了對應的避碰方案;Perera等[2]將本船碰撞區域劃分為8 個區,將目標船的相對運動航向劃分為8 個區,然后按照船舶相對距離范圍、速比條件將會遇情況劃分為了144 種,其中有效情況為63 種。會遇場景量化程度越高,對避碰決策越有利,但隨著引入的影響因子的增加,系統復雜性越高,遍歷需要的時間也越長。本文將借鑒無人駕駛車輛場景建模方法,通過引入本體論模型,建立航行態勢本體模型,并根據《規則》及駕駛實踐對會遇場景進行知識表述,實現在線推理,給出會遇場景、本船的避讓責任以及避讓行動方式,為智能避碰決策提供決策基礎,提高決策效率。
碰撞危險度是采取避碰行動的依據。Kearon等[3]首次提出由最近會遇距離DCPA和到達最近會遇點的時間TCPA加權的方法確定碰撞危險度,其只考慮到了2 個因素對碰撞危險度的影響,可能會對實際情況產生誤判;文獻[4-6]均是采用神經網絡的方法來確定船舶碰撞危險度,其將DCPA和TCPA、舷角以及航向航速作為系統輸入,具有良好的預測效果;文獻[7-9]利用模糊理論研究了碰撞危險度;劉冬冬等[7]在綜合考慮DCPA和TCPA、來船方位、距離和船速比的基礎上,構建了碰撞危險度模糊評價模型,并運用四元船舶領域(QSD)對DCPA的隸屬度函數進行了改進,可為避碰決策提供準確依據;胥文等[8]在考慮以上5 個影響因素的基礎上,結合船舶操縱性能、能見度情況以及航行水域情況對模糊隸屬度函數進行修正,提高了碰撞危險度研究的準確性。本文將在前人研究的基礎上,改進碰撞危險度隸屬度函數,并根據航行駕駛實踐,重新設計碰撞危險度合成模型。
無人駕駛船舶完成航行態勢感知與理解以及碰撞危險決策之后,需要根據駕駛實踐做出合理的避碰決策,一些學者遷移應用機器人避碰路徑規劃研究中的勢場理論來解決船舶的避碰問題[10-12],雖然能夠在理論上實現障礙物的避碰,但避碰幅度以及避碰行動方式受引力場及斥力場的影響,不能很好地契合航海實踐要求;一些學者認為,船舶避碰時機與碰撞危險度CRI直接相關,并以CRI為評價指標來求取避碰策略[13-14],但CRI受航行環境、能見度、兩船間距、兩船方位、DCPA和TCPA以及船速比等多個因素影響,且各因素之間存在相互制約關系,不同的研究者對不同的影響因素進行分析,CRI的計算結果存在一定的差異,且均沒有完備地考慮所有影響,直接將CRI作為船舶避碰的決定性指標會存在較大誤差;一些學者結合深度強化學習算法對船舶避碰行為決策展開了研究[15-16],其通過構建適用于無人駕駛船舶的深度強化學習模型(DRL),通過強化訓練得到了基本的避碰模型,但該方法需要大量的訓練數據,且模型結構對數據的依賴性較強,算法訓練耗時長,對于未知環境下的避碰無法達到實時性的要求;李麗娜等[17]提出了擬人化智能避碰決策方法(PIDVCA),通過模仿經驗豐富駕駛員(避碰專家)的避碰決策,利用機器學習構建動態避碰規則庫,做出了符合《規則》和海員通常做法的合理決策,避碰效果較好,但存在的問題就是不能完備地考慮船舶在航行過程中的所有會遇情況,且隨著會遇情況的增加,規則庫規模逐步擴大,遍歷需要更長的時間。
在船舶避碰過程中如何合理、恰當地確定避碰時機、避碰行動方式以及避碰幅度非常重要,《規則》第十六條規定:“需給他船讓路的船舶,應盡可能及早地采取大幅度的行動,寬裕地讓清他船”。國內外專家學者采用幾何避碰原理、速度障礙法、勢場理論、模糊數學方法、神經網絡、智能優化算法、人工智能及專家系統等方法建立了船舶避碰決策模型,這些方法對于避碰決策的發展有一定的理論指導意義,但共性問題是不能夠很好地貼近航海實際。
目前,基于駕駛實踐視角的無人船智能避碰決策研究較少,鑒于此,本文擬從駕駛實踐的角度討論船舶避碰決策問題。首先,對無人駕駛船舶智能避碰決策的合理性和實時性以及唯一性問題進行論述,然后建立智能避碰決策過程的航行態勢本體模型、多元復合避碰危險度評估模型以及BOP 智能避碰決策模型這3 個模型,最后,設計仿真實驗,并在典型會遇場景下驗證方法的有效性。
1 問題分析
從有人駕駛船舶駕駛實踐的角度分析無人駕駛船舶在做避碰決策時應主要考慮的問題有:
1) 決策的實時性。
船舶在海上航行時,受風、浪、流、能見度、水深等因素的約束,在避碰決策時需要綜合予以考慮。在復雜、多變的環境中快速做出響應是對避碰決策算法的要求,如果決策算法不能保證實時性或不能在可接受的時間范圍內做出決策,將嚴重威脅船舶的航行安全。
2) 決策的合理性。
船舶在做自主避碰決策時,需要最大限度地實現擬人化。有人駕駛船舶在操縱船舶的過程中,駕駛員會結合周圍的航行環境、航行規則及本船的操縱性能,將人、船環境視為整體進行考慮,主動做出綜合性的、有經驗的決策,無人駕駛船舶自主決策同樣也需要根據感知系統傳來的多源異構信息進行綜合處理分析,得出最優的避碰策略,從而實現擬人化且最優的決策。
3) 決策的唯一性。
船舶駕駛員在進行避碰決策的過程中,是通過評判碰撞危險程度,根據駕駛航行經驗給出一個準確的決策信息(舵角或者航速)來控制船舶避碰,這就要求無人駕駛船舶在執行決策算法的時候不能出現多個解,只能輸出唯一的、確定的、可執行的決策指令。
本文在進行船舶智能避碰決策方法研究的同時,充分考慮了以上問題,在此基礎上,構建無人駕駛船舶航行態勢本體概念模型,并結合《規則》及海員的通常做法對船舶會遇場景進行量化處理,建立船舶復合碰撞危險度評估模型,從駕駛實踐的角度出發,建立駕駛員視角(BOP)智能避碰決策模型,以船舶避碰總路徑最短為目標函數求解最優避碰策略,實現船舶智能航行及自主避碰。
2 模型構建
無人駕駛船舶自主航行需要實時與航行環境交互,獲取航行狀態信息,通過學習算法做出行為決策,其系統架構如圖1 所示。輸入船舶當前航行狀態、周圍礙航物信息,信息傳入行為決策層,經一系列解算后輸出船舶的決策信息并交由控制執行層完成對船舶的運動控制。圖中, λ ,? 分別為船舶的經度和緯度;Ψ為船舶航向;u為船舶前進速度;v為船舶橫移速度;r為船舶轉艏角速度;ΔΨ為決策輸出的航向改變量;ΔV為決策輸出的航速改變量; δ為船舶舵角;V為船舶航速。
2.1 無人駕駛船舶航行態勢本體模型
準確的無人駕駛船舶航行態勢理解是行為決策的基礎,避碰場景理解主要是基于對《規則》以及海員通常做法的理解,劃分典型的會遇場景,為避碰決策提供先決性條件。
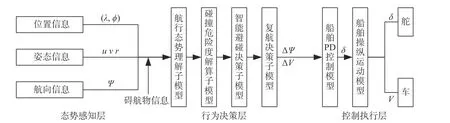
圖1 無人駕駛船舶自主航行系統架構圖Fig. 1 architecture diagram of autonomous navigation system of unmanned ship
《規則》中給出了對遇、交叉相遇、追越3 種會遇場景,如圖2 所示。但是在實際的船舶航行過程中對于不同的會遇情況,船舶有不同的航路權,故需要對會遇場景進行詳細劃分。
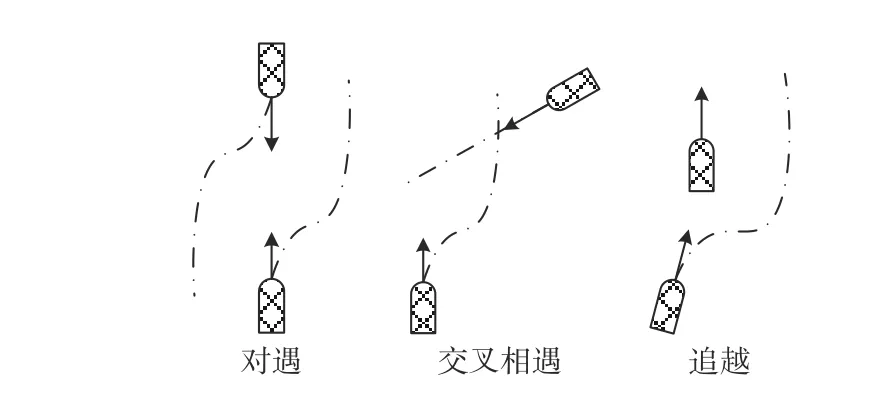
圖2 3 種典型會遇場景示意圖Fig. 2 Schematic diagram of three typical encounter scenarios
目前,有關無人船的航行態勢理解與建模的研究較少,無統一化的標準定義。基于簡單“IF···THEN···”推理規則的避碰知識庫,難以描述各種會遇形式和避碰階段的避碰方案。本文遷移應用無人車的場景建模方法[18],利用本體模型的強大信息表述能力,可邏輯化表述并量化航行態勢,結合駕駛實踐,對先驗航行知識進行描述,提高避碰決策效率。
航行態勢理解是通過對感知系統獲取的多源異構信息進行分類與理解,將無人駕駛船舶的航行態勢進行結構化表述。首先,根據“本體”理論將無人駕駛船舶的航行態勢分為實體和屬性。實體類代表著不同本質的客觀存在物,屬性類用于描述對象實體以及實體之間的關系屬性。本文將屬性類又分為實體屬性和關系屬性,其中實體屬性包括實體的位置、航向航速,關系屬性包括位置關系、航向關系、方位關系和速度關系。
感知系統獲取的信息包含靜態信息和動態信息。靜態信息一般指靜態障礙物實體,包括具有結構化的海圖實體以及其他靜態障礙物實體,其中海圖實體包括具有結構化特征的航道、導助航標志等,靜態障礙物實體是指靜止的非結構化實體,包括錨泊的船舶、礁石等。動態信息一般指航行環境中的動態障礙物實體和環境實體。
通過對感知系統獲取的多源異構信息進行實體與屬性描述,建立無人駕駛船舶航行態勢本體模型,然后在此基礎上結合《規則》及良好的船藝要求,將會遇場景進行量化劃分,并基于prolog 語言對會遇場景進行表述。
根據《規則》及駕駛實踐,本文以目標船的方位關系劃分了6 個會遇區域,分別為船艏、船艉、左舷正橫前、左舷正橫后、右舷正橫前及右舷正橫后。在每個會遇區域,又根據目標船與本船的航向關系以及航速關系,將會遇場景(ES)劃分為12 種,然后基于船舶航行態勢本體模型及prolog語言建立航行態勢理解與劃分表,如表1 所示。表中:HO 為對遇場景;DHO為危險對遇場景;CR為交叉相遇場景;OT 為追越場景;q為目標船的舷角;Ψt為目標船航向;Ψ0為本船航向;Vt為目標船航速;V0為本船航速。
本文針對海上環境復雜多變的特點,結合駕駛實踐,提出基于航行態勢本體模型的場景劃分方法,對航行環境降維處理,實現了無人駕駛船舶對航行態勢的理解與劃分,為智能避碰決策提供基礎,并且在一定程度上提高了決策效率。
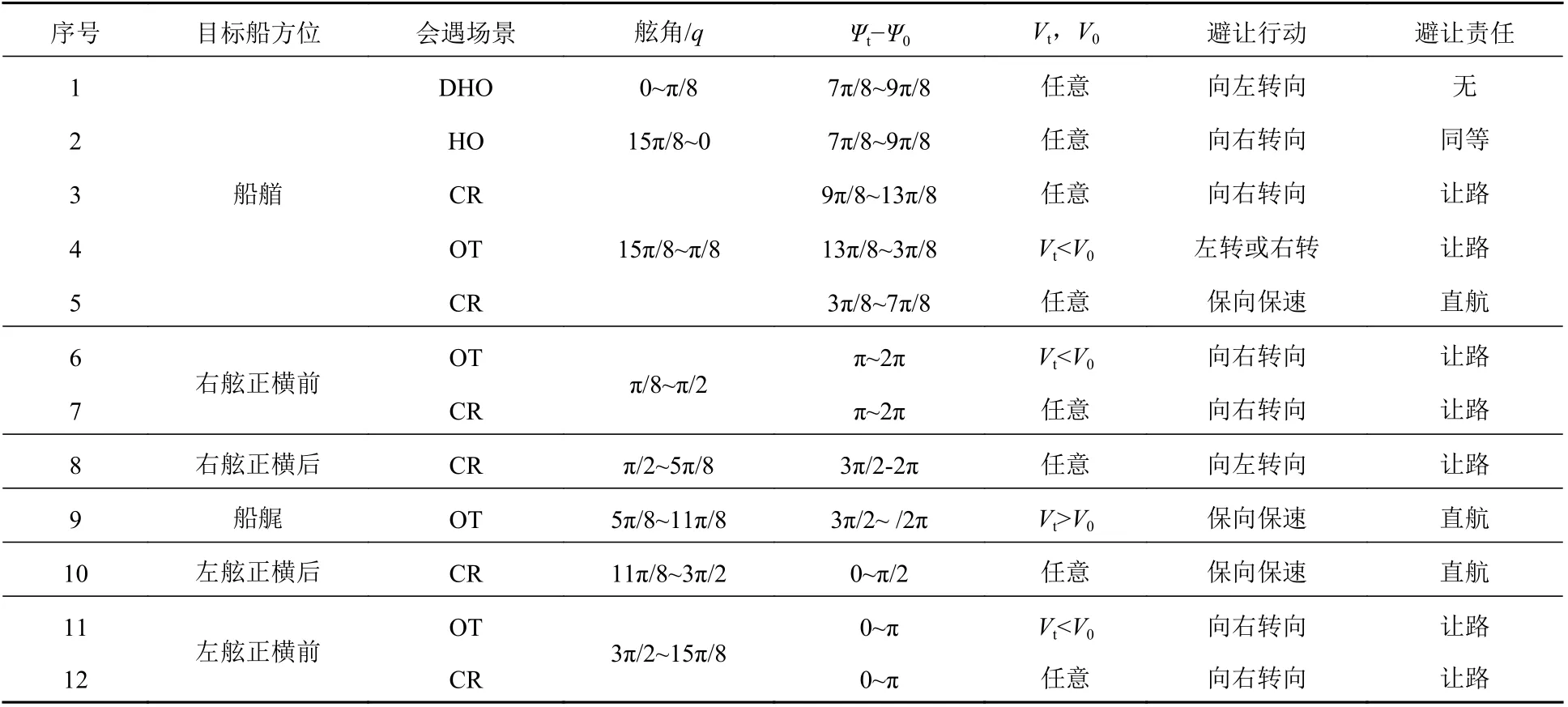
表1 航行態勢理解與劃分表Table 1 Navigation situation understanding and division
2.2 多元復合避碰危險度評估模型
《規則》沒有給出碰撞危險的定義,但其中很多條款是以構成碰撞危險為前提的,故需建立一定的模型將其量化。
在航海實踐中,駕駛員在判斷是否存在碰撞危險的同時,也就對存在碰撞危險的緊迫程度有了直觀的感受,以及定性與定量的分析,一般習慣于使用DCPA、兩船間距及其變化、TCPA來判斷是否存在碰撞危險以及碰撞危險的程度。但影響船舶碰撞危險度大小的因素很多,且相互制約,故本文在前人研究的基礎上,利用模糊理論建立了DCPA和TCPA、兩船距離、相對方位以及船速比這5 個影響因素的隸屬度函數,并依據駕駛實踐構建了多元復合碰撞危險度評估模型。
由文獻[8]可知,船舶間距離越小,船舶間碰撞危險越大,且從避讓難度上看,距離越小,避讓效果越差。任意時刻船舶間距離的隸屬度函數ud為:

船速比越大,碰撞危險度越大,任意時刻船速比的隸屬度函數uK為:

DCPA對碰撞危險度的影響較大,且DCPA的值越小,碰撞危險程度越高。任意時刻DCPA的隸屬度函數uDCPA為:
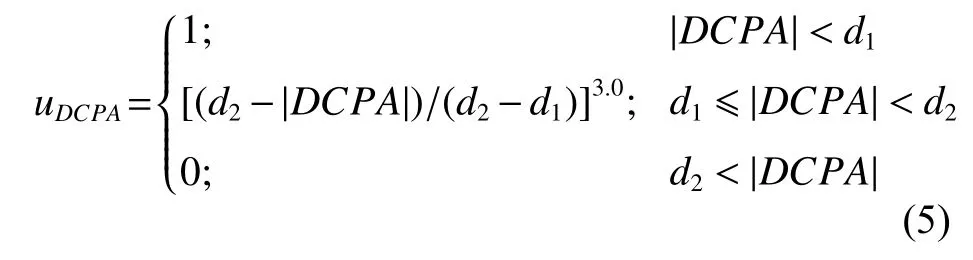
式中,d2為最小安全會遇距離。為簡化計算,取d2=2 n mile,考慮到船舶尺度的影響,在DCPA很小時也會發生碰撞,故取兩船船長的平均值,一般近似取為0.1 n mile。
TCPA是針對碰撞危險程度的評價指標。TCPA值越小,碰撞危險程度越高,任意時刻TCPA的隸屬度函數uTCPA為:
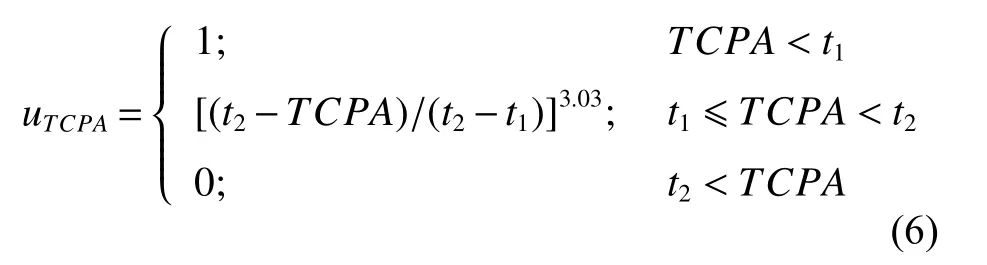

原模型對于CRI的計算采用

根據駕駛實踐規律,若DCPA大于安全會遇距離,盡管TCPA很小,船舶仍無碰撞危險,故改進的船舶碰撞危險度為

2.3 BOP 智能避碰決策模型
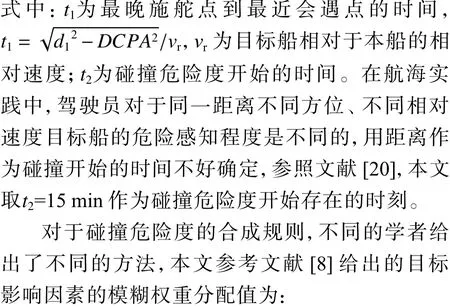
在前面幾個模型的基礎上,船舶智能避碰決策主要是解決船舶的最佳避讓時機及避讓幅度問題。由于船舶采取避碰行動的時機和幅度受《規則》的約束以及駕駛航行經驗的影響,不同駕駛員對于不同的會遇情況采取的行動不一致,在不同的時機采取避碰措施會產生不同的避讓效果,如圖3 所示。
圖3 中:O點為本船當前船位;A點為目標船當前船位;R1,R2,R3為船舶的不同避讓決策時機;P1,P2,P3為不同的最近會遇點; ?ψi(i=1,2,3)為對應于不同避讓決策時機所采取的不同避讓行動幅度,即航向變化量;A1,A2,A3為目標船轉向Δψ1,Δψ2,Δψ3的船舶位置;TC為無人駕駛船舶的真航向;AiO為兩船相對航向。
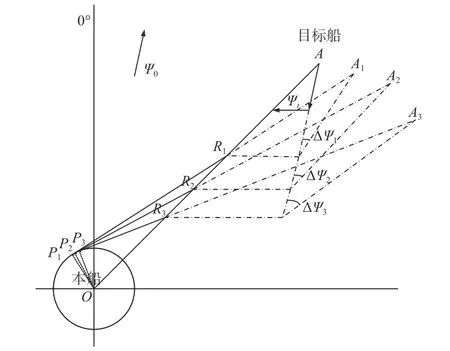
圖3 船舶轉向避碰行動方式示意圖Fig. 3 Schematic diagram of ship steering and collision avoidance action mode
本文將從駕駛員思維決策的角度出發,通過分析本船與目標船之間的相對運動幾何關系,在保證船舶能在安全會遇距離駛過讓清的基礎上建立BOP 智能避碰決策模型,以船舶避碰總路徑最短為目標函數,船舶操縱性能及《規則》為約束條件,量化避碰轉向區間,求解最優的避碰策略。BOP智能避碰決策模型流程圖如圖4 所示。
當船舶存在碰撞危險時,需要根據船舶安全會遇距離,通過幾何解算出避讓幅度。在不同的位置采取避碰措施將導致船舶避讓路徑長度不同,為求取不同轉向幅度下的船舶避碰最優路徑,建立以下目標函數:

式中:xk,yk分別為船舶當前的船位;xk+1,yk+1分別為船舶下一步的船位。
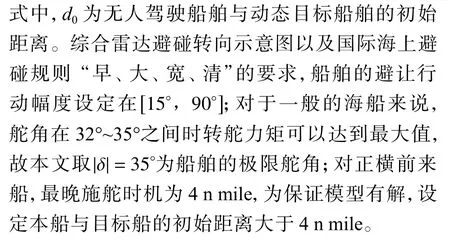
因避碰決策時機與避碰路徑的對應關系不易求解出解析式,故采用避碰行動距離量化模型,來求解每個避碰距離下的轉向幅度以及避碰路徑。根據駕駛實踐,對于正橫前的來船,一般在兩船相距4~6 n mile 時采取避碰行動;對于正橫后的來船,在兩船相距3~4 n mile 時采取避碰行動。本文對避碰轉向區間進行量化,按步幅為0.1 n mile進行取值,建立避讓決策時機 (R1,R2,···,Rn),避讓行動幅度一維向量為 (?ψ1,?ψ2,···,?ψn)。
在計算避碰路徑時,考慮到國際海上避碰規則要求以及船舶操縱性限制,需滿足以下約束條件:
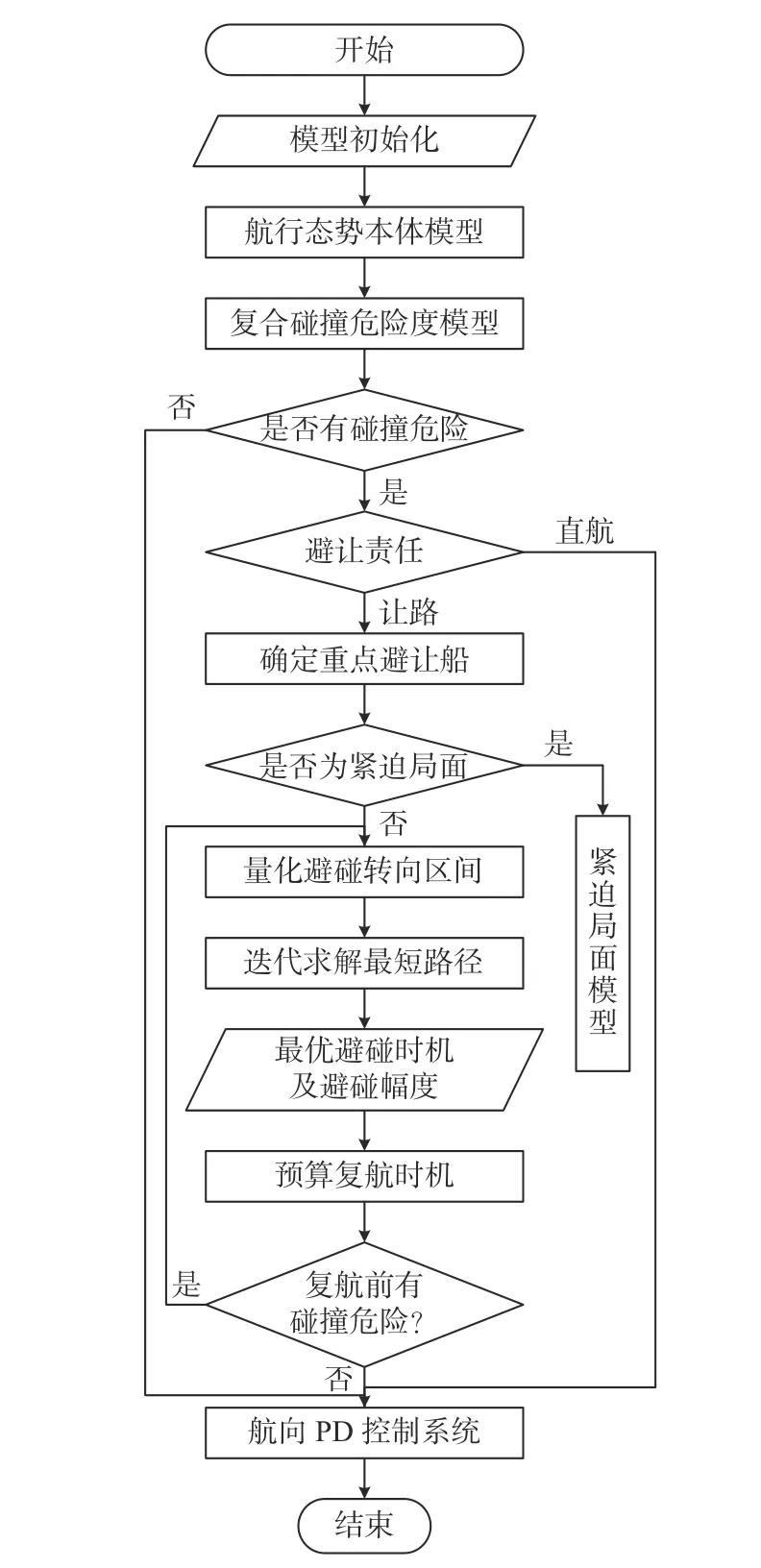
圖4 BOP 智能避碰決策模型流程圖Fig. 4 Flow chart of BOP intelligent collision avoidance decisionmaking model

在駕駛實踐中,要求駕駛員對船舶性能有充分的了解,在做決策時,要考慮船舶的轉舵時間以及旋回特性,鑒于此,本文考慮采用Abkowitz提出的三自由度整體型模型[10]:


式中:X,Y為外力在x,y軸上的分量;m為船舶質量;Izz為船體繞通過重心的鉛直軸的質量慣性矩(轉動慣量);N為作用于船舶的外力繞通過重心的鉛直軸的回轉力矩。
針對水動力導數的估算方法不作為本文的重點,故此處不再贅述。本文的船舶操縱數學模型選取ITTC 典型的Mariner 標準船型作為研究對象,其船型數據如表2 所示,利用文獻[21]中的無量綱水動力數據表,即可求得船舶的運動模型。
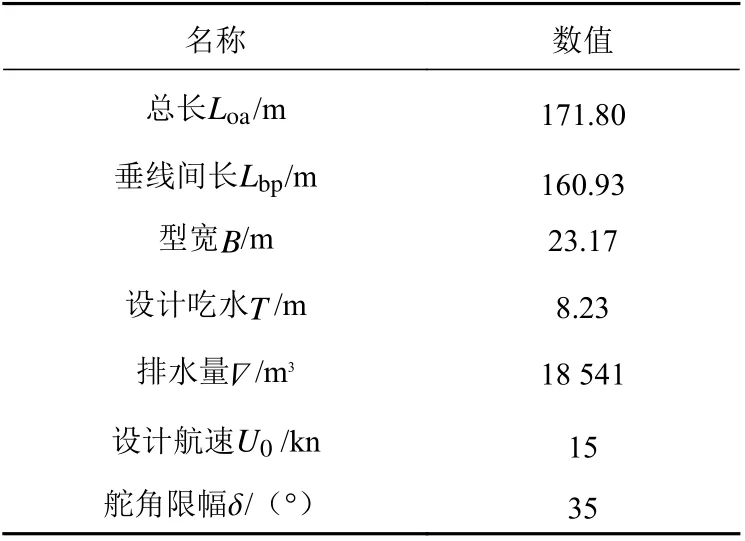
表2 Mariner 標準船型數據Table 2 Coefficients in mathematical model of ship maneuvering motion of Mariner
為貼合航海實際,在設計船舶轉向控制器時要考慮動舵合理、航向變化快速平穩、調節時間短,故本文采用PD 改向控制器模型。δ 的控制率為Cδ=?Kp(Ψ?Ψdesired)+Kdr,其中Ψ為船舶的當前航向,Ψdesired為決策航向,對船舶PD 控制模型進行參數整定,比例增益Kp= 0.3,微分增益Kd=1。
船舶在避讓操作之后,需進行復航操縱。在研究船舶復航時機的過程中,對于避碰行動后是恢復至船舶初始運動狀態還是恢復到原航線上一直留有爭議。但就避碰而言,只需考慮恢復初始運動狀態即可,恢復原航線是航行自動化系統的功能和任務。文獻[22]給出了常用的4 種恢復航向的時機模型:
1) 當目標船駛過本船正橫處時復航;
2) 當讓路船復航后,保證船舶間的DCPA大于最小安全會遇距離;
3) 當目標船駛過最近會遇距離點時復航;
4) 當目標船駛過本船船艏后復航。
無論哪種復航決策方式,都要保證兩船之間有一定的安全會遇距離。本文根據幾何避碰原理,解算了船舶預測復航時機,圖5 所示為船舶復航時機求解示意圖。
圖5 所示為兩船會遇,本船船首向上情況下,本船改向?Ψ避讓目標船,R為避讓決策時機,G為預測復航點,RML1 為船舶避碰操縱前的相對運動路徑,RML2 為船舶改向后的相對運動路徑,RML1'為RML1 的平行路徑且與船舶的最小安全會遇距離圓相切,G點為RML2 與RML1'的交點,船舶從R到G航行所用時間即為船舶的復航時機。計算出船舶復航時間點以及船舶復航時應走航向,利用PD 航向控制器控制船舶完成復航操縱。
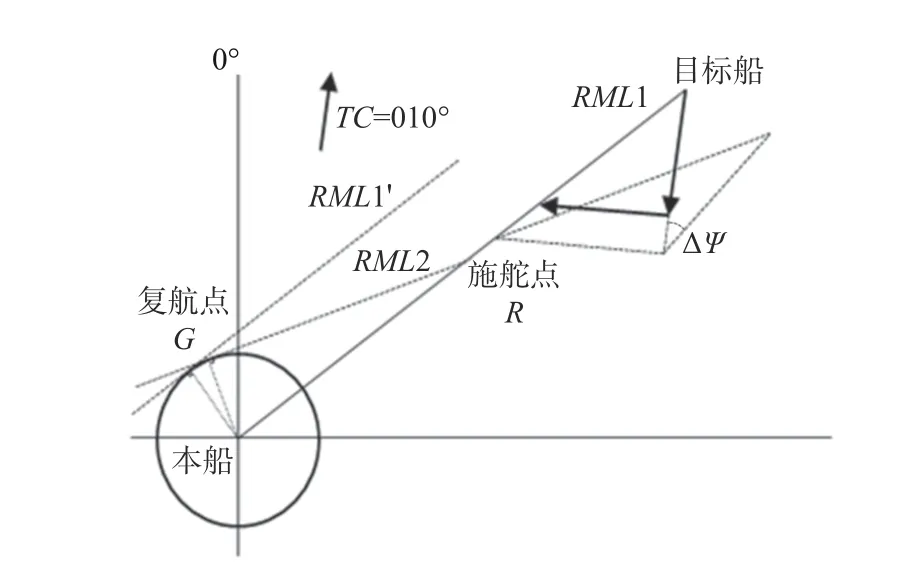
圖5 船舶復航時機求解示意圖Fig. 5 Schematic diagram of solving the timing of re-sailing
3 仿真試驗及分析
本節以案例仿真實驗來驗證基于駕駛實踐的無人船智能避碰決策研究方法的有效性。在仿真實驗中,本船采用ITTC 典型的Mariner 標準船型參數,借助Matlab 2016a,Simulink 仿真平臺與python3.6 設計仿真對比實驗,并與未考慮船舶操縱運動模型且利用探測圓(半徑取4 n mile)確定避碰時機的傳統避碰算法進行比較,在典型會遇場景下驗證算法的適用性及優越性。無人駕駛船舶與動態目標船舶的初始航行參數如表3 所示,仿真步長取6 s。
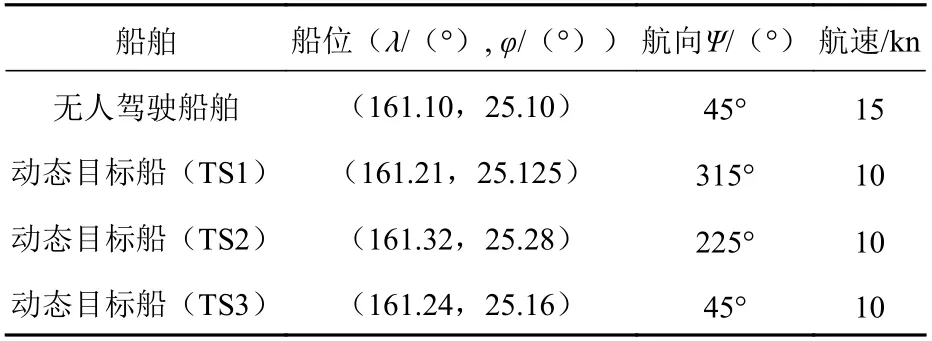
表3 船舶初始航行參數設置Table 3 Ship's initial navigation state data
仿真目標為無人駕駛船舶能夠趨向目標點并避讓動態目標船舶。當環境中不存在障礙物或障礙物不在安全會遇距離內時,無人駕駛船舶保持航向或者處于復航階段,調整方向朝著目標點前進;當障礙物出現在安全會遇距離內時,無人駕駛船舶利用本文算法及傳統避碰算法進行實時避障;當無人駕駛船舶接近目標點時,仿真結束。
在避碰仿真過程中,3 艘動態目標船舶保向保速航行并先后與無人駕駛船舶構成交叉相遇局面、對遇局面以及追越局面。圖6 所示為截取的船舶避碰仿真過程關鍵片段。圖中,軌跡交叉部分為無人駕駛船舶避讓后穿過動態目標船舶后方時的歷史軌跡。
對于動態目標船1,在T=1 000 s 時,無人駕駛船舶判斷目標船舶進入到本船的決策領域,分析目標船的航向及方位信息,經過航向態勢理解,決策為正橫后交叉會遇態勢,本船為讓路船,采取右轉的避讓行動方式,通過基于駕駛員視角的智能避碰決策方法求解船舶的最優避碰幅度。在T=2 000 s 時,無人駕駛船舶與目標船2 構成對遇局面,本船為讓路船,采取右轉的避讓行動方式,通過算法求解船舶的最優避碰幅度。在T=4 500 s 時,無人駕駛船舶與目標船構成追越局面,本船為追越船,目標船為讓路船,由于目標點在右側,所以選擇從右舷追越。基于傳統避碰模型決策得到的避讓時機固定,且均比本文算法早,轉向幅度較小,船舶路徑不光滑,船舶避碰總路徑為32.952 n mile,而基于駕駛員視角的智能避碰決策方法求解的船舶避碰總路徑為25.022 n mile,較大程度縮短了航程,提升了避讓性能。
通過仿真可知,無人駕駛船舶在與目標船舶構成碰撞危險時,能夠有效做出避碰決策,并且通過智能避碰決策算法能夠給出最優的避碰路徑。
圖7 所示為無人駕駛船舶在避碰過程中的航向變化以及舵角變化情況。從圖中可知,航向變化快速平穩,調節時間短,震蕩較小,打舵平滑,動舵合理,符合航海實踐。
由仿真實驗結果可知,無人駕駛船舶在不同的會遇態勢下均能安全避讓目標船舶,并根據不同的會遇態勢生成最優避碰策略,驗證了本文所提算法的有效性。
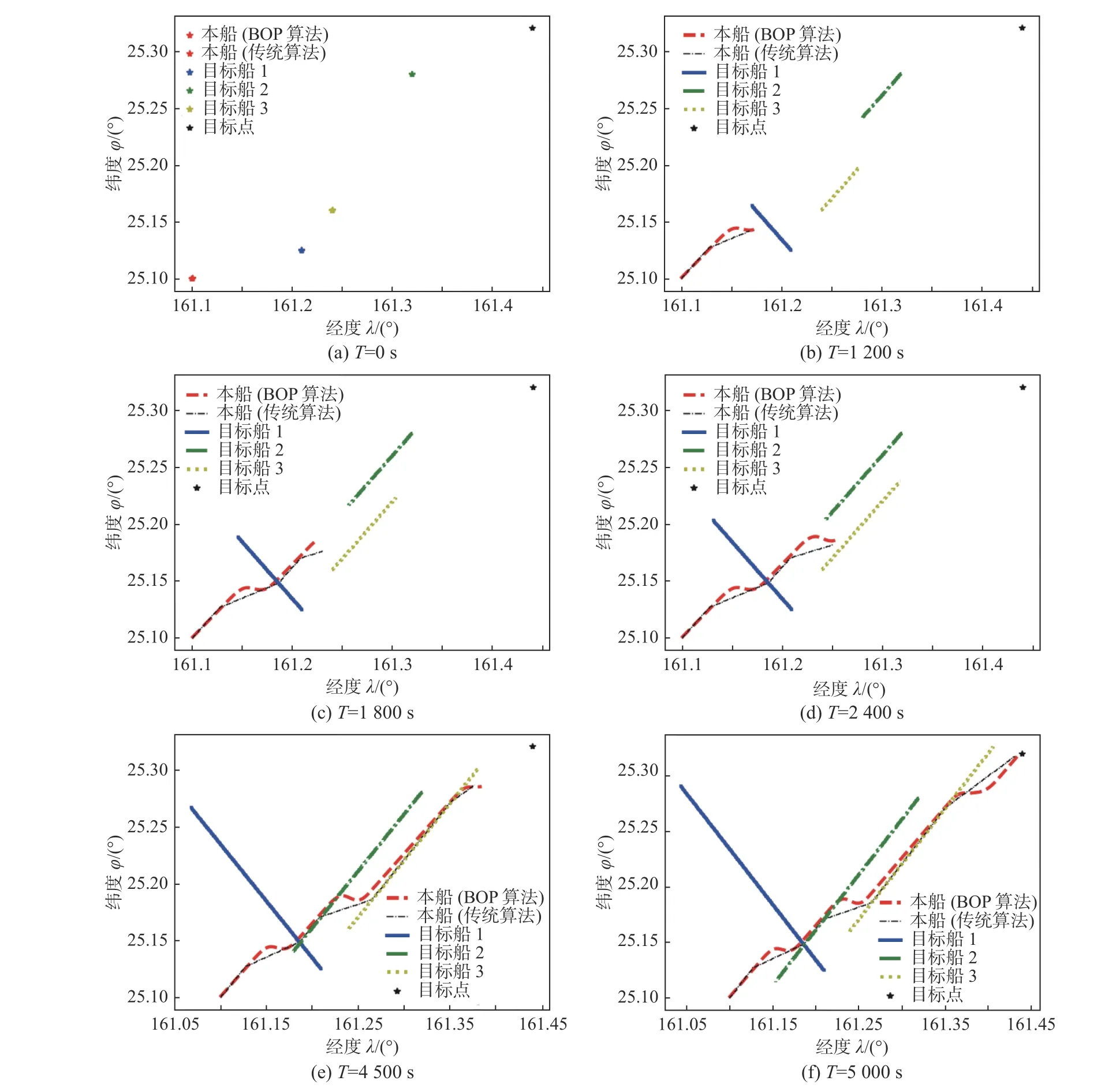
圖6 船舶避碰仿真過程圖Fig. 6 Ship collision avoidance simulation process diagram
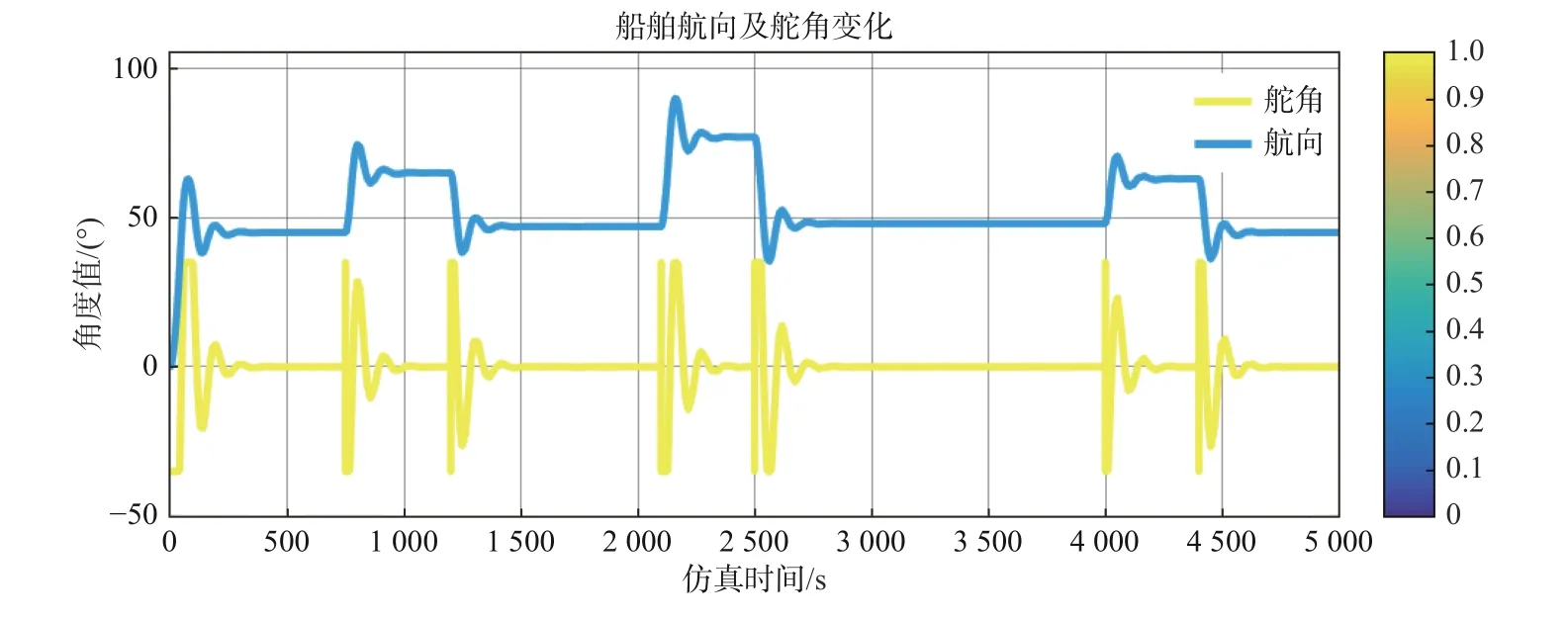
圖7 船舶避碰過程中航向舵角變化曲線Fig. 7 Course and rudder angle variation curve during collision avoidance
4 結 語
通過對無人駕駛船舶避碰決策所面臨問題的分析,提出了一種基于駕駛實踐的智能避碰決策方法,可使無人駕駛船舶根據感知系統傳來的信息,實時與環境交互,做出符合《規則》的避碰決策和路徑規劃。在典型會遇場景下進行的仿真實驗表明,該模型能夠在未知環境下完成自主避碰,并解算出最優路徑,證明了算法的有效性。在接下來的研究中,還需要對模型不斷完善,考慮更為復雜的環境擾動,加入對靜、動態障礙物領域模型,更加貼合航海實際。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
