基于物聯(lián)網(wǎng)多源協(xié)同感知井下精準(zhǔn)定位算法研究
2021-03-08 09:41:28王鈺寧周紹軍劉曉霞
軟件工程 2021年1期
關(guān)鍵詞:物聯(lián)網(wǎng)
王鈺寧 周紹軍 劉曉霞

摘? 要:針對(duì)單一感知技術(shù)對(duì)礦井井下人員或設(shè)備定位存在的不足,本文提出一種基于物聯(lián)網(wǎng)多源協(xié)同感知的礦井井下精準(zhǔn)定位算法。首先對(duì)物聯(lián)網(wǎng)井下感知定位系統(tǒng)框架進(jìn)行設(shè)計(jì);然后從多源多視角定位原理出發(fā),提出基于物聯(lián)網(wǎng)多源協(xié)同感知的礦井井下精準(zhǔn)定位算法;最后將本文算法與參考文獻(xiàn)算法進(jìn)行實(shí)驗(yàn)和對(duì)比分析,得到各算法的定位置信概率與誤差的比較曲線。通過(guò)實(shí)驗(yàn)和對(duì)比分析可知,本文算法具有一定的實(shí)用性和先進(jìn)性。
關(guān)鍵詞:精準(zhǔn)定位;井下;協(xié)同感知;多源;物聯(lián)網(wǎng)
中圖分類號(hào):TP76? ? ?文獻(xiàn)標(biāo)識(shí)碼:A
文章編號(hào):2096-1472(2021)-01-35-04
Abstract: This paper proposes a mine precise positioning algorithm based on multi-source collaborative sensing of the Internet of Things (IoT), aiming to improve single sensing technology for locating personnel or equipment in underground mines. First, a framework of IoT mine sensing and a positioning system are designed. Then, a mine precise positioning algorithm based on the multi-source collaborative sensing of the IoT is proposed from the principle of multi-source and multi-view positioning. Finally, experiments and comparative analysis are carried out between the proposed algorithm and the reference algorithm, and the comparison curve of probability and error of each algorithm at a fixed position is obtained. The proposed algorithm proves to be practical and advanced.
Keywords: precise positioning; mine; collaborative sensing; multi-source; Internet of Things
1? ?引言 (Introduction)
礦井井下安全是礦井生產(chǎn)的生命線,而井下安全最為重要的部分就是井下作業(yè)人員的安全。井下作業(yè)人員定位是確保井下作業(yè)人員安全的重要保障之一,并能對(duì)井下作業(yè)人員實(shí)時(shí)定位,為井下應(yīng)急救援、人員作業(yè)管理以及礦井建設(shè)等提供重要位置信息[1]。物聯(lián)網(wǎng)(Internet of Things, IoT)多源協(xié)同感知定位技術(shù)是利用物聯(lián)網(wǎng)感知技術(shù),如各種傳感器、射頻識(shí)別和全球定位等,實(shí)現(xiàn)實(shí)時(shí)采集、監(jiān)控、連接、互動(dòng),進(jìn)而達(dá)到物與物、物與人、人與人的泛在連接和物的智能化感知、識(shí)別和管理。但礦井有其自身特點(diǎn),常規(guī)定位因無(wú)線信號(hào)的非直射徑向誤差和多徑衰減等,導(dǎo)致定位精度低和適應(yīng)性差等缺點(diǎn),因此,必須采用先進(jìn)的物聯(lián)網(wǎng)多源協(xié)同感知定位技術(shù),來(lái)改善和提高井下定位的精度和適應(yīng)性等[2]。
對(duì)礦井井下定位的研究而言,國(guó)內(nèi)外產(chǎn)業(yè)界和研究者進(jìn)行了諸多研究和探索,其定位方法可分為鄰近信息法、場(chǎng)景分析法和幾何特征法等。其中幾何特征法目前應(yīng)用最廣泛,又分為三邊定位法、三角定位法和雙曲線定位法[3]。無(wú)論何種定位方法,都離不開(kāi)無(wú)線通信技術(shù)的支撐,礦井定位的無(wú)線通信技術(shù)主要有WiFi、RFID、UWB和ZigBee等。定位時(shí)使用精確的測(cè)距方式予以實(shí)現(xiàn),而測(cè)距方法主要基于檢測(cè)接收信號(hào)強(qiáng)度指示(Received Signal Strength Indication, RSSI)的測(cè)距模式,該模式以RFID、ZigBee、WiFi等無(wú)線通信技術(shù)為支撐;另一種是基于傳輸?shù)竭_(dá)時(shí)間(Time of Arrival, ToA)和到達(dá)時(shí)間差(Time Difference of Arrival, TDoA)的測(cè)距模式,該模式以線性調(diào)頻擴(kuò)頻(Chirp Spread Spectrum, CSS)及UWB(Ultra Wide Band, UWB)等無(wú)線通信技術(shù)為支撐[4]。礦井井下定位主要用于礦井作業(yè)人員或設(shè)備的定位,大多采用基于RSSI、ToA和TDoA測(cè)距的定位方法[5]。而到目前為止,研究者們對(duì)井下定位取得了新的進(jìn)展,如文獻(xiàn)[6]對(duì)地下開(kāi)采巖體結(jié)構(gòu)中的微震聲源進(jìn)行定位研究,提出一種基于解析迭代解的多傳感源協(xié)同定位算法。
綜上,現(xiàn)有研究未充分利用物聯(lián)網(wǎng)技術(shù),為礦井井下定位提高精確協(xié)同定位技術(shù)和方法等,有待進(jìn)一步研究,以實(shí)現(xiàn)精確定位。因此,針對(duì)礦井現(xiàn)有定位方法存在的問(wèn)題,利用無(wú)線超高頻測(cè)距、慣性導(dǎo)航、多源混合定位與多源信息融合等技術(shù),對(duì)其進(jìn)行物聯(lián)網(wǎng)多源多視角感知的協(xié)同精確定位方法研究,提出一種具有較高時(shí)間準(zhǔn)確性和低環(huán)境影響率的精確定位算法,以實(shí)現(xiàn)井下作業(yè)人員和設(shè)備的精確定位、大型移動(dòng)設(shè)備人員接近檢測(cè)、采掘裝備與井下搜救人員(機(jī)器人)自主導(dǎo)航與定位等服務(wù)。
2? ?系統(tǒng)架構(gòu)(System architecture)
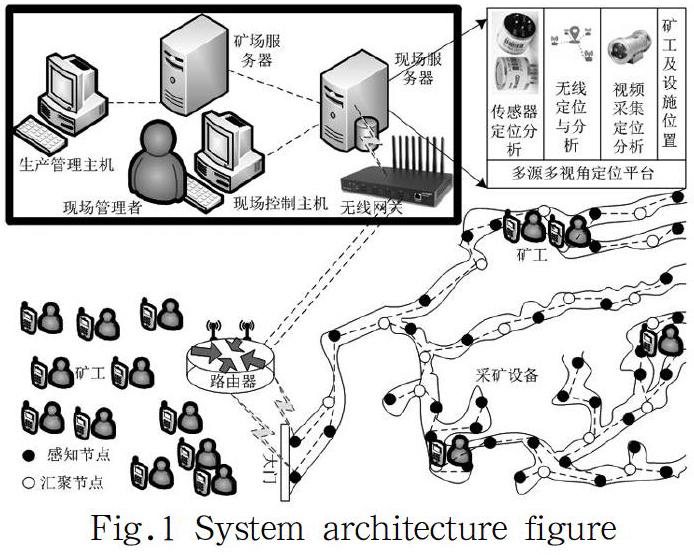
礦井井下有其自身的特點(diǎn)和特殊的要求,其能見(jiàn)度非常低,重巖墜落的可能性十分巨大,另外隨時(shí)可能產(chǎn)生危險(xiǎn)的易燃易爆有毒氣體。礦井一旦發(fā)生事故,都涉及人員生命安全,其救援難度亦是非常大。因此,急需引入新的物聯(lián)網(wǎng)技術(shù),解決井下作業(yè)人員和重要設(shè)備設(shè)施的定位問(wèn)題。物聯(lián)網(wǎng)的發(fā)展和普及,為礦井井下定位提供了新的思路和范式,利用物聯(lián)網(wǎng)多源多視角感知技術(shù),可提供多源協(xié)同的精確定位服務(wù),其系統(tǒng)架構(gòu)如圖1所示。
如圖1所示,在礦井井下布置三類特性的節(jié)點(diǎn),移動(dòng)特性不強(qiáng)的大型設(shè)備節(jié)點(diǎn)、作業(yè)人員的動(dòng)態(tài)感知節(jié)點(diǎn)和信息感知與傳輸匯聚節(jié)點(diǎn)。每個(gè)節(jié)點(diǎn)由多種感知態(tài)勢(shì)組成,如信息感知與傳輸匯聚節(jié)點(diǎn)就集信息感知與傳輸匯聚于一體,一方面要實(shí)現(xiàn)實(shí)時(shí)的信息感知任務(wù);另一方面要進(jìn)行信息的傳輸匯聚,將控制和命令信息傳輸?shù)骄伦鳂I(yè)人員和大型設(shè)備。這三類節(jié)點(diǎn),起到兩方面的作用,一是對(duì)人員和設(shè)備進(jìn)行感知;二是對(duì)感知信息進(jìn)行傳輸與交互的匯聚節(jié)點(diǎn)。因此,井下部署節(jié)點(diǎn)為感知節(jié)點(diǎn)和匯聚節(jié)點(diǎn),人員為自身攜帶的感知設(shè)備構(gòu)成感知節(jié)點(diǎn)。對(duì)圖1進(jìn)行形式化抽象,得到如圖2所示的示意圖。
由圖2可知,感知層由各種傳感器、感知節(jié)點(diǎn)和匯聚節(jié)點(diǎn)構(gòu)成,其中傳感器負(fù)責(zé)井下數(shù)據(jù)采集,感知節(jié)點(diǎn)主要對(duì)感知到的數(shù)據(jù)進(jìn)行現(xiàn)場(chǎng)處理與發(fā)送,匯聚節(jié)點(diǎn)主要是傳輸井下感知數(shù)據(jù)、接收經(jīng)網(wǎng)絡(luò)傳輸來(lái)的應(yīng)用命令和產(chǎn)生井下WiFi信號(hào)等[7]。感知層的傳感器主要有井下傳感器、視頻傳感器和井下人員的WiFi指紋及人體傳感器;井下傳感器主要有瓦斯傳感器、一氧化碳傳感器、風(fēng)速傳感器、風(fēng)壓傳感器、溫度傳感器、開(kāi)停傳感器和風(fēng)門傳感器等,這些傳感器中,與定位相關(guān)的為視頻傳感器、井下作業(yè)人員的WiFi指紋及人體傳感器。網(wǎng)絡(luò)層主要由路由器與井下匯聚節(jié)點(diǎn)進(jìn)行通信,并與后端系統(tǒng)進(jìn)行連接。應(yīng)用層由井外傳輸網(wǎng)絡(luò)和后端系統(tǒng)構(gòu)成。后端系統(tǒng)通過(guò)網(wǎng)關(guān)與路由器進(jìn)行連接,服務(wù)部分主要由現(xiàn)場(chǎng)服務(wù)器、礦場(chǎng)服務(wù)器和現(xiàn)場(chǎng)監(jiān)控主機(jī)等構(gòu)成,其中礦場(chǎng)服務(wù)器連接礦內(nèi)各職能部門,以便進(jìn)行礦區(qū)管理;現(xiàn)場(chǎng)服務(wù)器運(yùn)行傳感器定位、無(wú)線定位與分析和視頻定位與分析的多視角協(xié)同定位算法。
3? ?定位算法(Positioning algorithm)
3.1? ?多源多視角定位原理
由圖2可知,感知層的傳感器中,與定位相關(guān)的傳感器為視頻傳感器、WiFi指紋和人體傳感器,其中人體傳感器采用人體紅外傳感器,以感知人體離感知節(jié)點(diǎn)的距離。由此,得到多源多視角定位原理,如圖3所示。
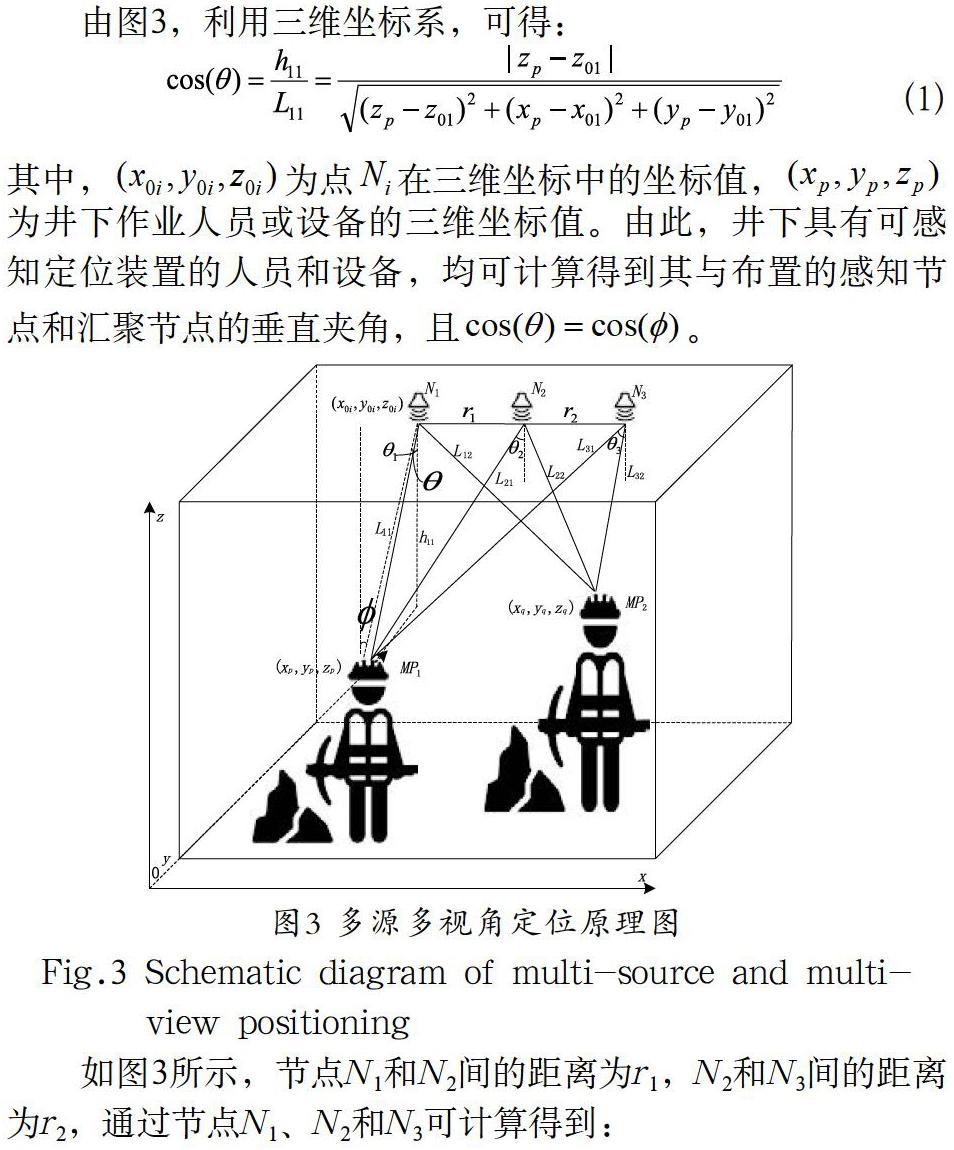
由圖3,利用三維坐標(biāo)系,可得:
其中,為點(diǎn)在三維坐標(biāo)中的坐標(biāo)值,為井下作業(yè)人員或設(shè)備的三維坐標(biāo)值。由此,井下具有可感知定位裝置的人員和設(shè)備,均可計(jì)算得到其與布置的感知節(jié)點(diǎn)和匯聚節(jié)點(diǎn)的垂直夾角,且。
如圖3所示,節(jié)點(diǎn)N1和N2間的距離為r1,N2和N3間的距離為r2,通過(guò)節(jié)點(diǎn)N1、N2和N3可計(jì)算得到:
然后利用式(1)和式(2),可求得井下作業(yè)人員的精確三維坐標(biāo)。同理可計(jì)算任意進(jìn)入井下作業(yè)的人員的三維坐標(biāo)。
3.2? ?定位算法
為確保定位精度,采用多樣本特征提取技術(shù)實(shí)現(xiàn)實(shí)時(shí)在線井下作業(yè)人員及設(shè)備的精確定位。人員的特征提取來(lái)自視頻傳感器、WiFi指紋和人體傳感器的實(shí)時(shí)數(shù)據(jù),與井下位置三維位置地圖數(shù)據(jù)庫(kù)一起,映射到實(shí)時(shí)位置變換矩陣,得到實(shí)時(shí)位置特征,結(jié)合實(shí)時(shí)協(xié)同定位算法,一起輸出精確的井下作業(yè)人員和設(shè)備設(shè)施的三維井下坐標(biāo),其過(guò)程描述如圖4所示。
如圖4所示,從原始多源感知數(shù)據(jù)集中提取含有位置特征的大量實(shí)時(shí)信息,來(lái)表征井下作業(yè)人員和設(shè)備實(shí)時(shí)位置的原始數(shù)據(jù),然后與多源特征數(shù)據(jù)庫(kù)結(jié)合,利用多源多視角精確協(xié)同定位算法,得到井下作業(yè)人員和設(shè)備的精確位置信息,以實(shí)現(xiàn)實(shí)時(shí)精確定位。其算法步驟如下:
第1步:依據(jù)采集到的信息,利用式(1)和式(2),得到原始位置信息數(shù)據(jù)集,并用向量來(lái)表示,其中為井下作業(yè)人員在處采集到的三個(gè)信息源的向量,N為參考點(diǎn)個(gè)人員的向量構(gòu)成的矩陣維度為。
第2步:映射定義。定義映射,其中為參考點(diǎn)所在歐幾里得空間,H為高階希爾伯特泛函空間,利用核函數(shù):
計(jì)算H中的內(nèi)積;式(3)中,表示向量。
第3步:數(shù)據(jù)標(biāo)準(zhǔn)化處理。對(duì)數(shù)據(jù)進(jìn)行標(biāo)準(zhǔn)化處理,得到新的標(biāo)準(zhǔn)化數(shù)據(jù)集而更新原數(shù)據(jù)集,其更新后為:
然后對(duì)由式(1)、式(2)得到的多源感知下坐標(biāo)數(shù)據(jù)進(jìn)行RSS(Root-Sum-Squares)序列均值化處理,即可得到M維實(shí)時(shí)特征向量;對(duì)M維向量數(shù)據(jù)進(jìn)行本征維度處理,得到:
其中,為監(jiān)測(cè)點(diǎn)附近的多傳感器感知數(shù)據(jù)經(jīng)式(12)處理后得到的個(gè)數(shù);為距離的本征維度數(shù)。則式(13)即為被測(cè)點(diǎn)離感知點(diǎn)的最優(yōu)距離。再利用式(1)、式(2)得到被測(cè)點(diǎn)的最優(yōu)坐標(biāo)值。
4? ?實(shí)驗(yàn)與結(jié)果分析(Experiment and result analysis)
實(shí)驗(yàn)在L型巷道中進(jìn)行。如圖5所示為實(shí)驗(yàn)測(cè)試使用巷道平面示意圖,使用兩種類型的節(jié)點(diǎn),一種為感知節(jié)點(diǎn),另一種為匯聚節(jié)點(diǎn)。實(shí)驗(yàn)時(shí)按照?qǐng)D1方式進(jìn)行系統(tǒng)構(gòu)建,被測(cè)對(duì)象為八位身高不一的同學(xué),測(cè)得如表1所示每位同學(xué)所在點(diǎn)的三維數(shù)據(jù)。
對(duì)得到的實(shí)驗(yàn)數(shù)據(jù),利用本文算法進(jìn)行多源協(xié)同精確定位算法的計(jì)算,并與文獻(xiàn)[8]—文獻(xiàn)[10]進(jìn)行對(duì)比分析,得到如圖6所示的實(shí)驗(yàn)結(jié)果比較分析圖。由圖6可知,文獻(xiàn)[8]和文獻(xiàn)[9]的誤差波動(dòng)比較大,平穩(wěn)性相對(duì)差一點(diǎn),而文獻(xiàn)[10]采用融合定位方法,得到的對(duì)比數(shù)據(jù)有波動(dòng),但相對(duì)于文獻(xiàn)[8]和文獻(xiàn)[9]而言,還是比較好的。本文算法定位平均誤差較小,隨著測(cè)試點(diǎn)距離初始位置變遠(yuǎn),其誤差會(huì)變大,但穩(wěn)定性較好。
5? ?結(jié)論(Conclusion)
單一感知技術(shù)對(duì)礦井井下作業(yè)人員或設(shè)備定位存在不足,因此本文提出一種基于物聯(lián)網(wǎng)多源協(xié)同感知的礦井井下精準(zhǔn)定位算法。首先對(duì)物聯(lián)網(wǎng)井下感知定位系統(tǒng)框架進(jìn)行設(shè)計(jì),得到多源井下感知定位的系統(tǒng)框架;然后從多源多視角定位原理出發(fā),提出基于物聯(lián)網(wǎng)多源協(xié)同感知的礦井井下精準(zhǔn)定位算法;最后在校L型樓道進(jìn)行實(shí)驗(yàn),并利用本文算法進(jìn)行多源協(xié)同精準(zhǔn)定位,與其他方法進(jìn)行了對(duì)比分析。通過(guò)實(shí)驗(yàn)和對(duì)比分析可知,本文算法在定位誤差和執(zhí)行概率方面,具有一定的優(yōu)越性。
參考文獻(xiàn)(References)
[1] Dong L, Zou W, Li X, et al. Collaborative localization method using analytical and iterative solutions for microseismic/acoustic emission sources in the rockmass structure for underground mining[J]. Engineering Fracture Mechanics, 2019, 210(4):95-112.
[2] Guo Jikun, Chen Sihan, Zhao Qing. Research on Optical Fiber Location System of Coal Mine Based on Φ-OTDR [C]. International Conference in Communications, Signal Processing, and Systems, CSPS, 2017:485-492.
[3] Ambarish G. Mohapatra, Bright Keswani, Shivani Nanda, et al. Precision local positioning mechanism in underground mining using IoT-enabled WiFi platform[J]. International Journal of Computers & Applications, 2020, 42(3):266-277.
[4] Firoozabadi A D, Azurdia-Meza C A, Soto I, et al. A Novel Frequency Domain VLC Three-Dimensional Trilateration System for Localization in Underground Mining[J]. Applied Sciences, 2019, 9(7):1-15.
[5]Rogers W. Pratt, Kahraman M. Mustafa, Drews Frank A, et al. Automation in the Mining Industry: Review of Technology, Systems, Human Factors, and Political Risk[J]. Mining, Metallurgy & Exploration, 2019(36):607-631.
[6] Dong Longjun, Zou Wei, Li Xibing, et al. Collaborative localization method using analytical and iterative solutions for microseismic/acoustic emission sources in the rockmass structure for underground mining[J]. Engineering Fracture Mechanics, 2019, 210(4):95-112.
[7] 汪金花,郭云飛,郭立穩(wěn),等.基于GRPM井下定位的MPMD匹配算法的試驗(yàn)研究[J].煤炭學(xué)報(bào),2019,44(04):1274-1282.
[8] 沈輝,李世銀.基于WiFi與PDR融合的井下定位方法[J].煤礦機(jī)械,2020,41(10):202-204.
[9] Karthikeyan A, Arunachalam V P, Karthik S. Performing Data Assessment in Terms of Sensor Node Positioning over Three Dimensional Wireless Sensor Network[J]. Mobile networks & applications, 2019, 24(6):1862-1871.
[10] 李宗偉,王翀,王剛,等.煤礦井下人員融合定位方法[J].工礦自動(dòng)化,2020,46(1):59-64.
作者簡(jiǎn)介:
王鈺寧(1982-),女,本科,講師.研究領(lǐng)域:物聯(lián)網(wǎng)數(shù)據(jù)感知與定位技術(shù).
周紹軍(1971-),男,碩士,副教授.研究領(lǐng)域:計(jì)算機(jī)應(yīng)用技術(shù).
劉曉霞(1976-),女,碩士,副教授.研究領(lǐng)域:計(jì)算機(jī)應(yīng)用技術(shù),物聯(lián)網(wǎng).
猜你喜歡
軟件導(dǎo)刊(2016年9期)2016-11-07 21:56:29
軟件導(dǎo)刊(2016年9期)2016-11-07 21:32:45
中國(guó)科技博覽(2016年22期)2016-11-01 15:02:01
中國(guó)科技博覽(2016年22期)2016-11-01 13:21:09
中國(guó)科技博覽(2016年19期)2016-10-19 14:58:22
電腦知識(shí)與技術(shù)(2016年21期)2016-10-18 22:33:02
科技視界(2016年22期)2016-10-18 17:23:30
中國(guó)新通信(2016年16期)2016-10-18 11:01:39
中國(guó)新通信(2016年16期)2016-10-18 11:00:54
科學(xué)與財(cái)富(2016年28期)2016-10-14 01:24:06