操縱桿角位移測量裝置的設計
2021-03-09 00:03:18劉闖韓嘉驊張寧寧趙志遠
機械 2021年1期
劉闖,韓嘉驊,張寧寧,趙志遠
操縱桿角位移測量裝置的設計
劉闖,韓嘉驊,張寧寧,趙志遠
(四川大學 機械工程學院,四川 成都 610065)
為克服操縱桿接觸式角度傳感器帶來的機械磨損從而影響輸出特性的缺陷,采用TDK-Micronas公司最新款的磁傳感器編程器TDK MSP V1.0為軟件開發平臺,以HAL 3725霍爾芯片設計出一種非接觸式角度霍爾傳感器。通過對傳感器芯片的選型,傳感器模型與標定實驗平臺的搭建,硬件電路的設計以及編程器對傳感器標定的軟件流程控制,最終經過實驗測試采集出傳感器數字信號。實驗結果表明:與接觸式傳感器相比信號波動小,更加靈敏,減少機械磨損,從而實現非接觸式角度傳感器的設計。
操縱桿;HAL 37xy;非接觸式;傳感器標定
操縱桿作為一種重要的人機交互接口,已廣泛應用于汽車、生產自控、船舶、軍工等眾多領域,而角度傳感器是操縱桿中重要的感知器件[1]。傳統操縱桿主要由普通電位計和機械部件直接接觸,在諸如劇烈震動和極端溫度等條件工作環境中,由于電位計的機械磨損會逐漸導致誤差增大,縮短生命周期影響角度傳感器的輸出特性[2]。那么非接觸特性就顯得至關重要,本文通過對HAL 37xy系列霍爾芯片的研究,設計一款可以取代普通電位計的非接觸式霍爾角度傳感器[3-5]。主要原理通過對HAL 37xy霍爾芯片施加偏置電壓以及磁場,取得與磁場成比例的電信號,從而實現非接觸式傳感器的測量定位[4,6-7]。
1 HAL 37xy系列霍爾芯片的選擇
HAL 37xy系列霍爾芯片是由德國的著名的TDK-Micronas公司基于Micronas的3D HAL(R)技術而開發的第二代用于測量線性位移以及旋轉角度的霍爾元件,與第一代用于測量線性位移以及旋轉角度的霍爾元件相比,第二代霍爾元件具有更加完善的線性位移和角度測量性能,其線性測量誤差降低25%,而其角度測量誤差更是降低30%有余。基于Micronas 3D HAL(R)技術的先進性,第二代霍爾芯片可以在低至±20 mT的磁場環境中工作,并且其在特定的溫度范圍內具有良好的漂移表現。如圖1所示為HAL 37xy霍爾芯片實物圖[8]。
圖1 HAL 37xy霍爾元件
傳統的平面霍爾技術僅對正交于霍爾芯片表面的磁場敏感,除了正交磁場外,HAL 37xy對平行于霍爾芯片表面施加的磁場也很敏感。通過將垂直于霍爾板集成到標準CMOS工藝中,使得三個磁場分量B、B和B成為可能。其通過測量磁場的正弦和余弦分量來捕獲磁場矢量,這為各種位置檢測提供了一種潛在的應用程式,例如線性位移、旋轉角度、通軸角度測量等。
HAL 37xy系列霍爾芯片包括三個子系列,其中HAL 371x和HAL 372x可提供一個12位比例線性模擬信號輸出模式,并且帶有上拉或下拉電阻器的集成斷線檢測功能。與HAL 372x相比較,HAL 371x系列霍爾芯片將360°測量范圍分成四個重復的90°(MOD 90°)或三個120°(MOD 120°)段。而HAL 373x系列霍爾芯片具有數字輸出模式,包括PWM模式和SENT模式,數字輸出模式是可編程的,PWM模式輸出可配置為0.2~2.0 kHz之間的頻率,最高分辨率為12位。根據操縱手柄的應用需求,主要是用來代替普通接觸式電位器或者編碼器。故選擇模擬量輸出,且不需要測量角度模數的選擇,因此對于操縱手柄而言最合適的芯片就是HAL 372x系列芯片。
要實現角度測量,如圖2所示為軸端或軸側裝配方案測量0~360°角度的裝配方式,軸端裝配的方案更適合操控手柄的角位移測量,對于軸端裝配方案,可測量的磁場分量為B和B,因此最終確定選擇型號為HAL3725的霍爾芯片。
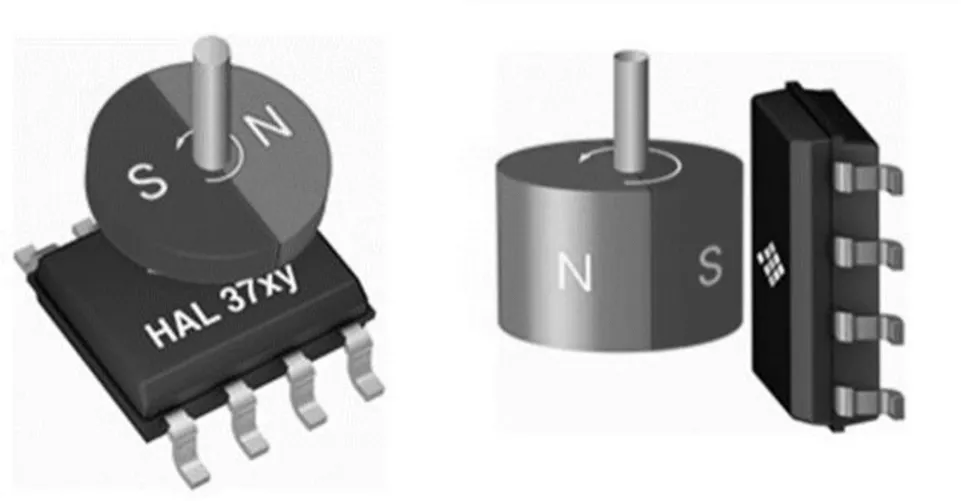
圖2 裝配方案
片上信號處理根據兩個磁場分量計算角度,并將該值轉化為輸出信號。由于采用了先進的3D HAL技術,該芯片在規定的溫度范圍內具有出色的漂移特性,從而為角度的測量提供了更高的精度等級。除了內置信號處理器外,其還具有任意可編程的線性特性,可對輸出信號進行線性化(最多可設33個設定點)也就是不但在0~360°,可輸出0~5 V的模擬信號,也可以通過編程在其他角度范圍(例如0~120°),輸出電壓百分比仍為100%。
2 霍爾角度傳感器標定模型搭建及硬件設計
在對傳感器進行編程之前,根據實際情況的需求,建立一個傳感器簡化模型,這樣便于對傳感器進行編程,然后設計以及繪制霍爾芯片的外圍電路,并進行PCB設計,打樣制板,實物制作出來后,就可以進行傳感器的編程及標定。
2.1 傳感器機械模型的搭建
利用三維繪圖軟件根據軸端裝配模式,設計了結構模型如圖3所示,底層板和上層板尺寸均為30 mm×30 mm,霍爾芯片居中,磁鋼位置也是居中,磁鋼被嵌入在旋冒中,旋冒可以輕松旋轉,氣隙(磁鋼中心到霍爾芯片表面中心的垂直距離)為=4±0.1 mm,當然也可以通過調整螺栓改變氣隙高度。
2.2 霍爾傳感器硬件設計

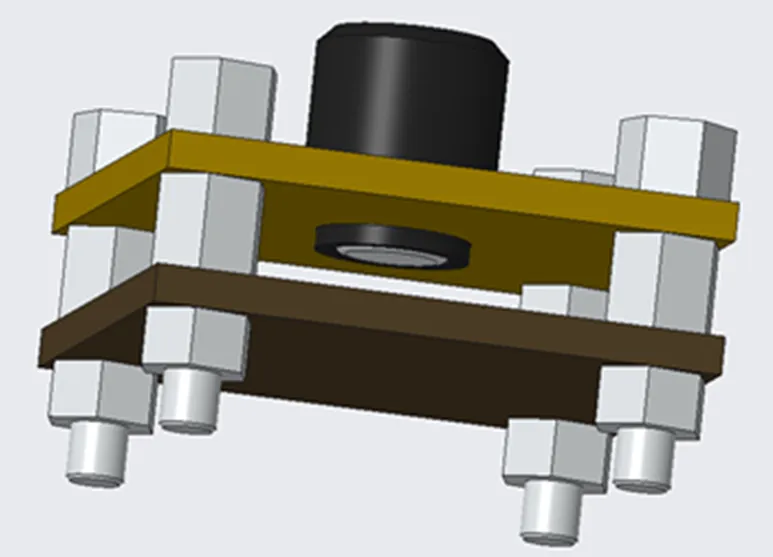
圖3 HAL 37xy內部結構框圖
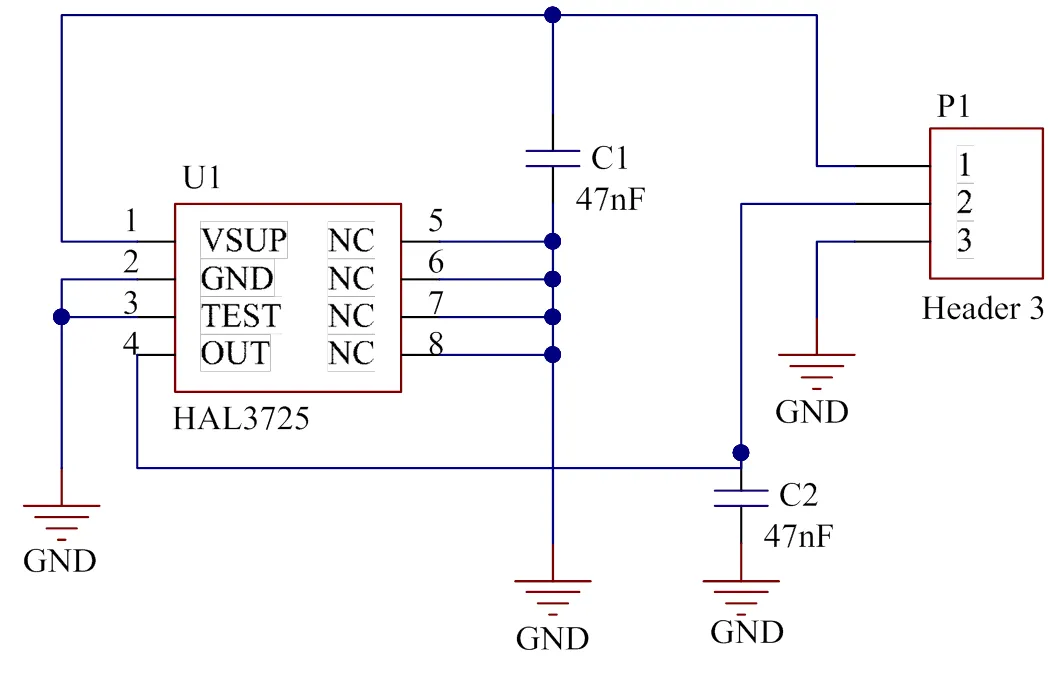
圖4 HAL 3725外圍電路
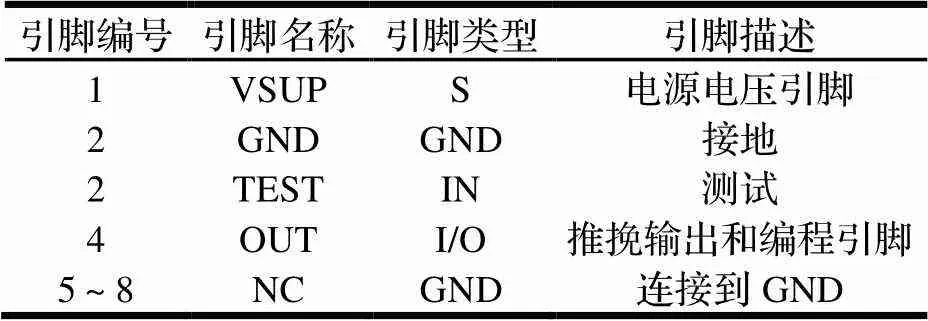
表1 HAL 3725引腳描述
在進行PCB設計時,PCB布局相對簡單,因為這里只有一個芯片、兩個陶瓷電容,僅僅需要盡量讓兩個電容靠近引腳即可,最重要的是霍爾芯片的位置上,必須居中,輸出焊盤大小均勻即可,然后就是PCB的布線,這里主要注意的是,盡量避免直角走線和銳角走線,一般情況下直角和銳角走線會使得傳輸線的線寬產生變化,造成其阻抗的不連續。
3 霍爾角度傳感器的編程與校準
霍爾角度傳感器的編程,這里的編程并非傳統意義的編程,并不需要寫代碼,而是利用特定的編程器,進行程序的標定,主要是對其內置信號處理的可編程寄存器進行編碼校準,包括可編程一階低通濾波器、可編程輸出增益和失調、可編程輸出鉗位(用于誤差帶定義)、可編程參考位置、可編程磁檢測范圍等,通過對非易失性存儲器進行編程。除內置信號處理外,該傳感器還具有任意可編程的線性特性,可對輸出信號進行線性化(最多33個設定點)。
HAL 3725霍爾芯片可實現任意角度的滿量程輸出,這里對0~360°的滿量程輸出進行編程,HAL 37xy系列霍爾芯片具有兩種不同的操作模式。在應用模式下,傳感器提供比例模擬輸出電壓或數字輸出信號(PWM或SENT)。在編程模式下,可以更改傳感器的寄存器設置。上電后傳感器始終在應用模式下運行。通過傳感器輸出引腳上的脈沖將其切換到編程模式。
在編程模式下,HAL 3725霍爾芯片一般通過調節傳感器輸出引腳上的串行報文來尋址。如圖5所示,將邏輯“0”編碼定義為在位時間內沒有電平變化,把邏輯“1”編碼定義為通常占位時間的50%的電平變化。而每一位時間之后,都會發生電平變化。
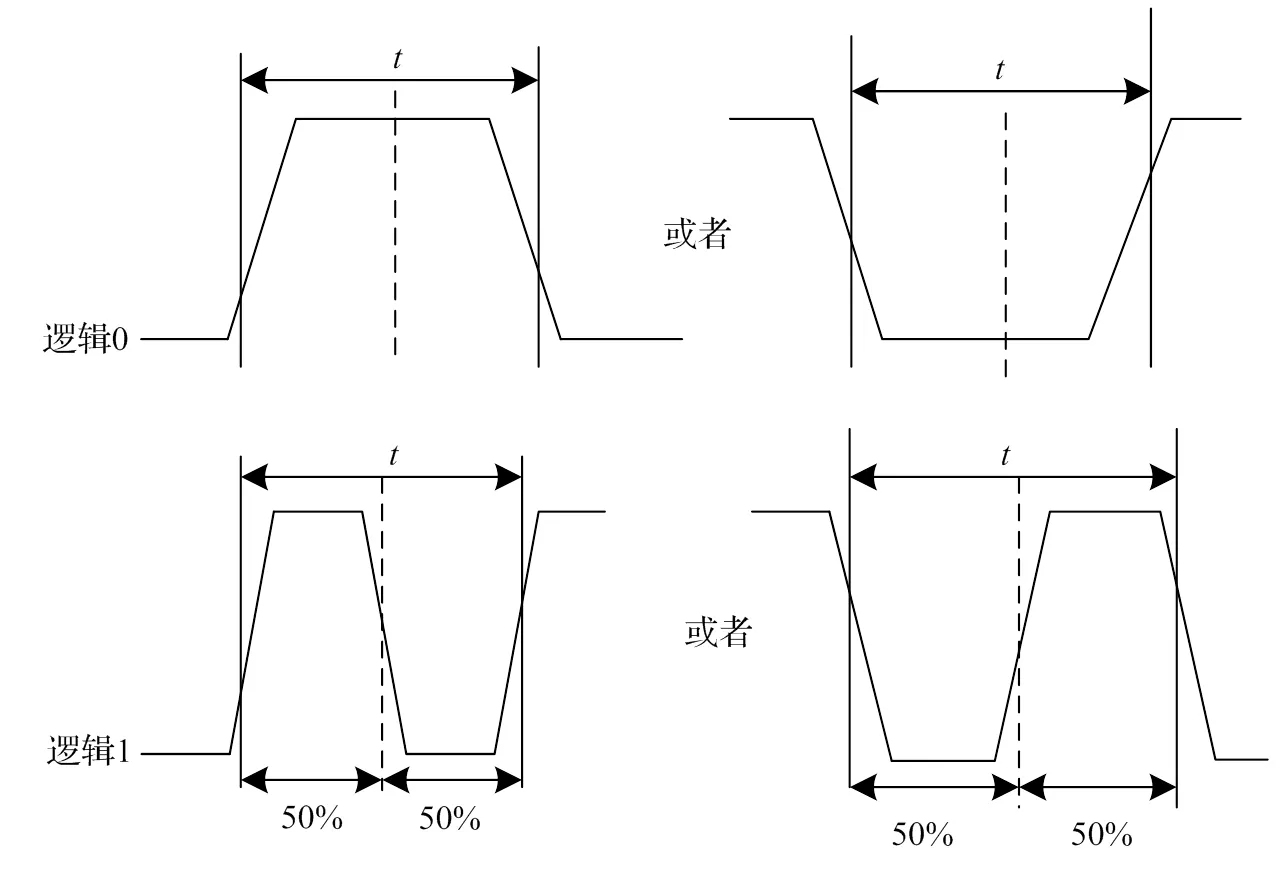
圖5 霍爾傳感器邏輯圖
對于生產和鑒定測試,必須在對HAL 3725進行最終調整和編程之后,將LOCK位設置為1,將POUT位設置為零。在鎖定芯片存儲器之前,需要校驗所有寄存器值,以確保將目標數據正確存儲在傳感器的存儲器中。鎖定過程是否成功應通過鎖定后讀取LOCK位的狀態來檢查。
3.1 霍爾芯片信號路徑分析
HAL 37xy的信號路徑詳細信息如圖6所示,DSP部分主要進行信號調節,其參數存儲在EEPROM中,霍爾芯片信號路徑包含兩種寄存器,只讀寄存器(RAM)和可編程寄存器(EEPROM),只讀寄存器包含信號路徑中某些步驟的測量數據,而可編程寄存器主要是信號處理方面,對傳感器進行標定時有相關應用。這里對只讀寄存器進行說明,其中TADJ寄存器內置結溫度的數字值,它的長度為16位,并且是二進制編碼的,0~32767之間的范圍用于溫度信息,通常溫度傳感器的校準方式是在-40℃時寄存器值為100LSB,在160℃時寄存器值為1200LSB。

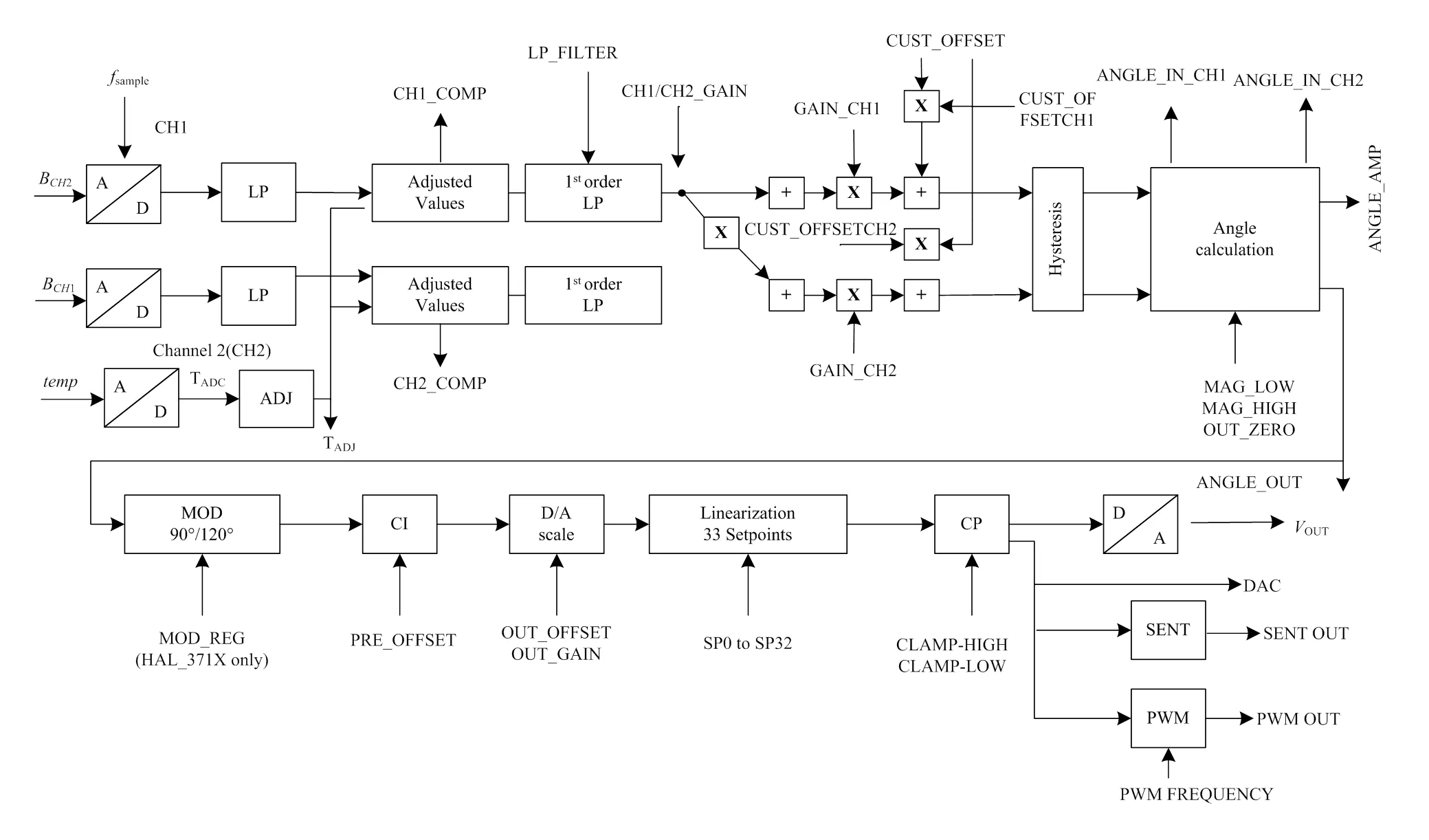
圖6 HAL 37xy內部信號路徑[8]
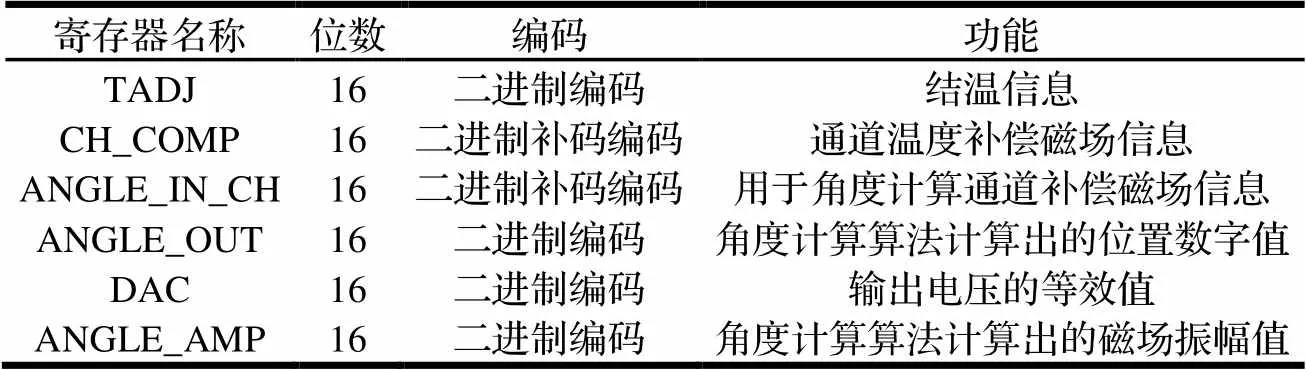
表2 寄存器說明1
其中,ANGLE_AMP寄存器中的磁場振幅值,理論上,是根據通道1和通道2中的磁場分量計算出的,其計算式如下:

式中:1為通道1磁場分量,mT;2為通道2磁場分量,mT。
然而實際上,磁場振幅方程式增加了大約1.6倍,因此最終計算式為:

OUT_ZERO定義角度輸出的參考位置,它可以設置為輸出范圍的任何值。它是33個設定點的起點/參考點。其次,該角度可用于將角度計算的PI不連續點移動到所需角度范圍的最大距離,以避免由于噪聲而導致輸出360°環繞。
表3中,OUT_GAIN定義輸出信號的增益。寄存器的長度為16位,并采用二進制補碼編碼。OUT_GAIN=1是中性設置,并且當角度從0°變化到360°時,輸出信號從0%變化到100%(如果OUT_OFFSET設置為0)。OUT_GAIN可以在-64和64之間變化。鉗位CLAMP_LOW和CLAMP_HIGH定義模擬輸出的最大和最小輸出電壓。CLAMP可用于定義傳感器輸出的診斷范圍。兩個寄存器的位長度都是16位,并且都二進制補碼編碼。CLAMP_LOW和CLAMP_HIGH的值都可以在滿量程的0%~100%之間。
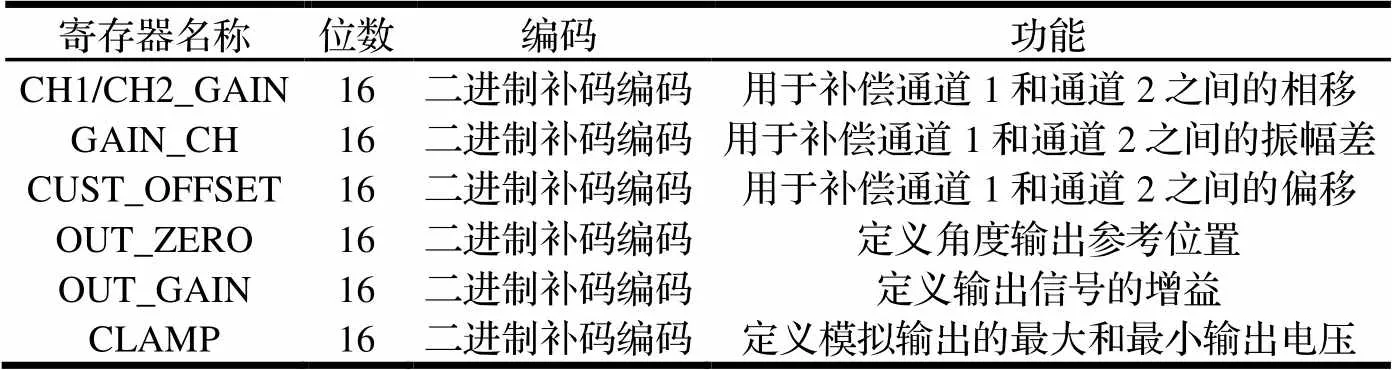
表3 寄存器說明2
3.2 霍爾芯片程序的編寫及校準
為了對HAL 3725霍爾芯片進行編程,一般需要硬件和軟件的編程工具。針對本校準實驗利用SolidWorks軟件建模,搭建校準實驗平臺如圖7所示。
編程工具則選用新一代磁傳感器編程器TDK MSP V1.0,它是TDK-Micronas公司開發的完整的編程工具,集成了LabView編程環境,只要根據需要,校準相關寄存器參數即可,相當方便,可大大縮短開發時間,軟件設計流程如圖8所示。
如圖9所示,標號①這里是根據起始點位置的磁場強度得到的ADC值,一般情況下此值不要太接近飽和值,以免芯片處于飽和磁場下。標號②這里一般將磁鐵旋轉至輸出起始位置,點擊此按鈕。標號⑥與標號②正好對應,將磁鐵旋轉至輸出的終止位置,點擊此按鈕。標號⑦和標號①相對應,是根據終止點位置的磁場強度得到的ADC值,此值亦不要太接近飽和值。標號③是根據設計要求設置傳感器的起始點的輸出電壓值,相對應的標號⑧是根據設計要求設置傳感器的終止點的輸出電壓值。標號④所指的是在兩個極限位置(起始點和終止點)的數據獲得后,點擊此按鈕,得到Sensitivity和Voq兩個參數值,其中標號⑤指的是點擊此按鈕將參數寫入芯片的存儲器中,標號⑨指的是鎖定按鈕,如果測試合格,可以將芯片鎖住,芯片鎖住后不能再進行讀寫操作。以上步驟,就是HAL3725霍爾芯片的標定過程,接著就可以對輸出信號進行測試。
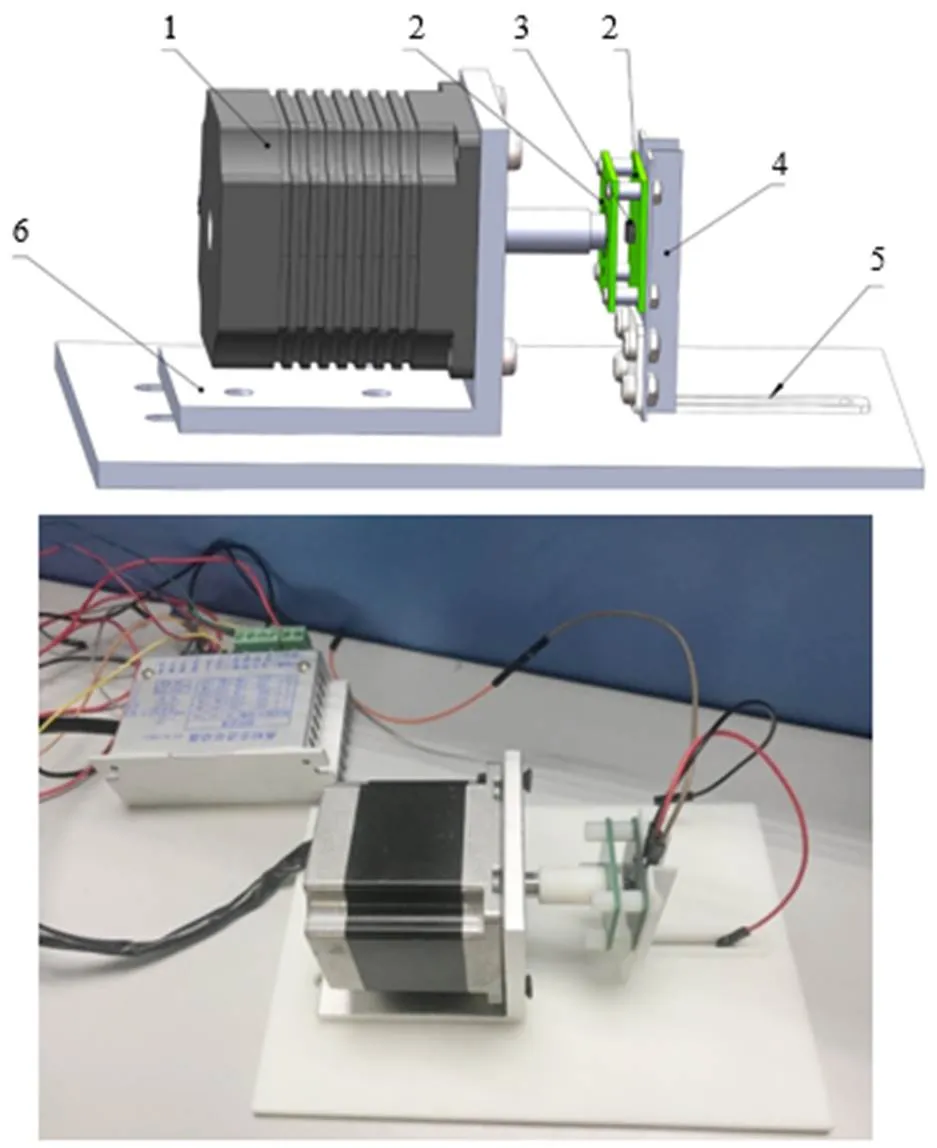
1.步進電機 2.PCB板 3.HAL 3725芯片 4.支架1 5.底座 6.支架2
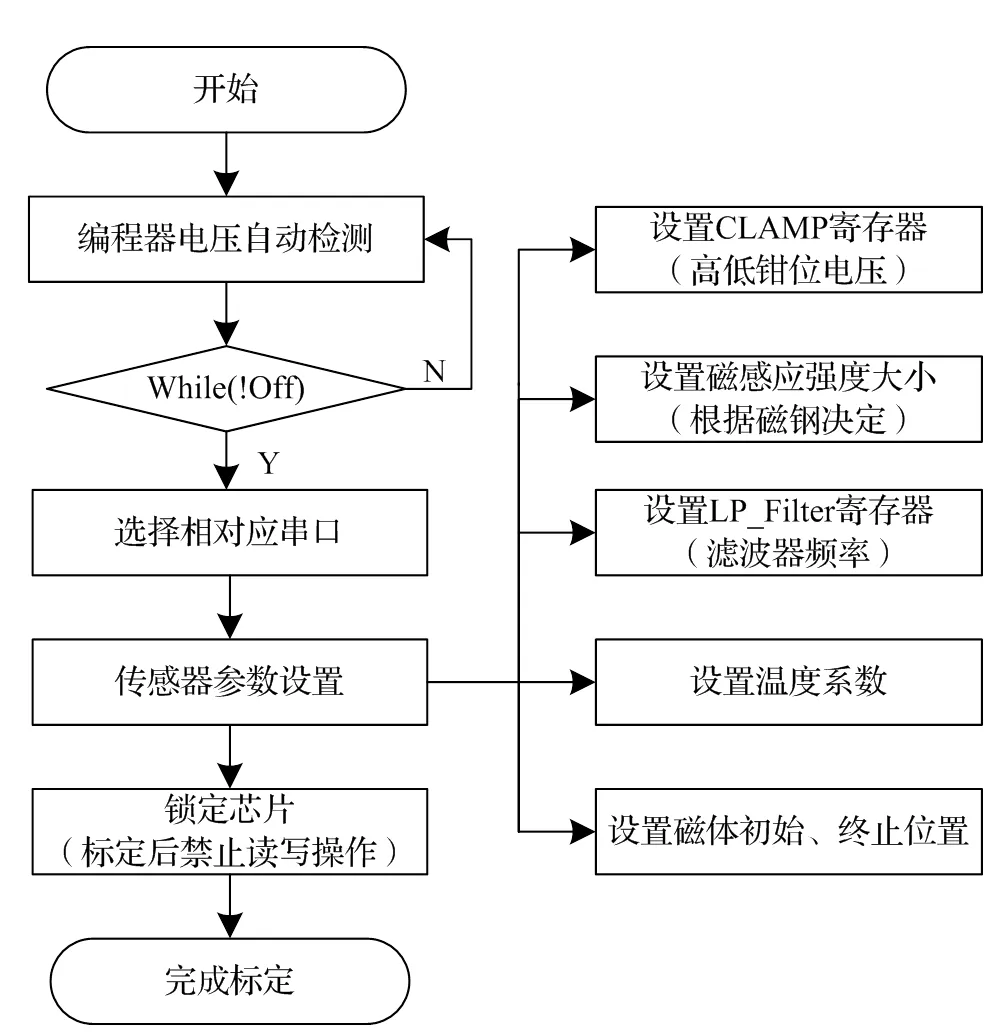
圖8 霍爾傳感器標定軟件設計流程圖
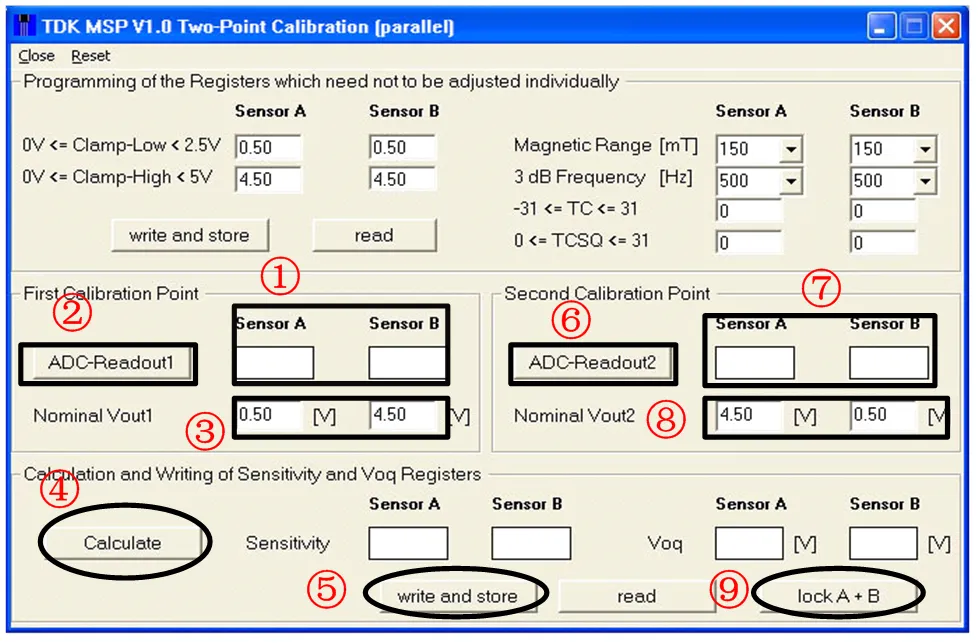
圖9 編程器標定界面
4 霍爾傳感器的數據采集
對于本文設計的霍爾傳感器主要應用于車輛操縱桿中,數據采集則使用STM32F103為微處理器,帶有USB串口,CAN通信模塊及4路12位分辨率AD轉換模塊的控制板。如圖10所示將霍爾傳感器的三個引腳分別用杜邦線連接在控制板的5 V,GND及AD輸出引腳上。由于STM32F103微控制器只識別模擬電壓3.3 V,則在設計AD電路過程中將其用電阻分壓,便可輸入5 V模擬電壓[9]。通過對步進電機旋轉角度的控制,帶動磁鐵旋轉,則霍爾傳感器會產生持續的電信號通過AD轉換模塊傳輸到微控制器中,轉換成STM32F103可識別的數字信號,最終通過與PC端相連接采集出霍爾傳感器數字信號[10]。
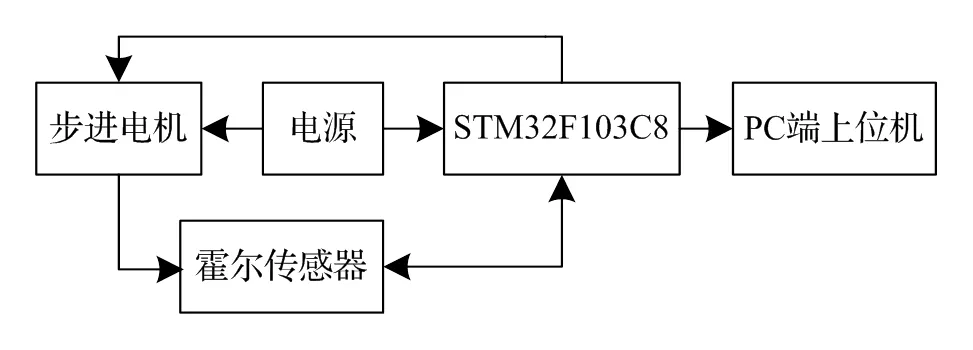
圖10 數據采集實驗框圖
5 結論
通過進行實際測試,獲得普通電位計與本次標定的霍爾角度傳感器初始數據圖像,如圖11、圖12所示。
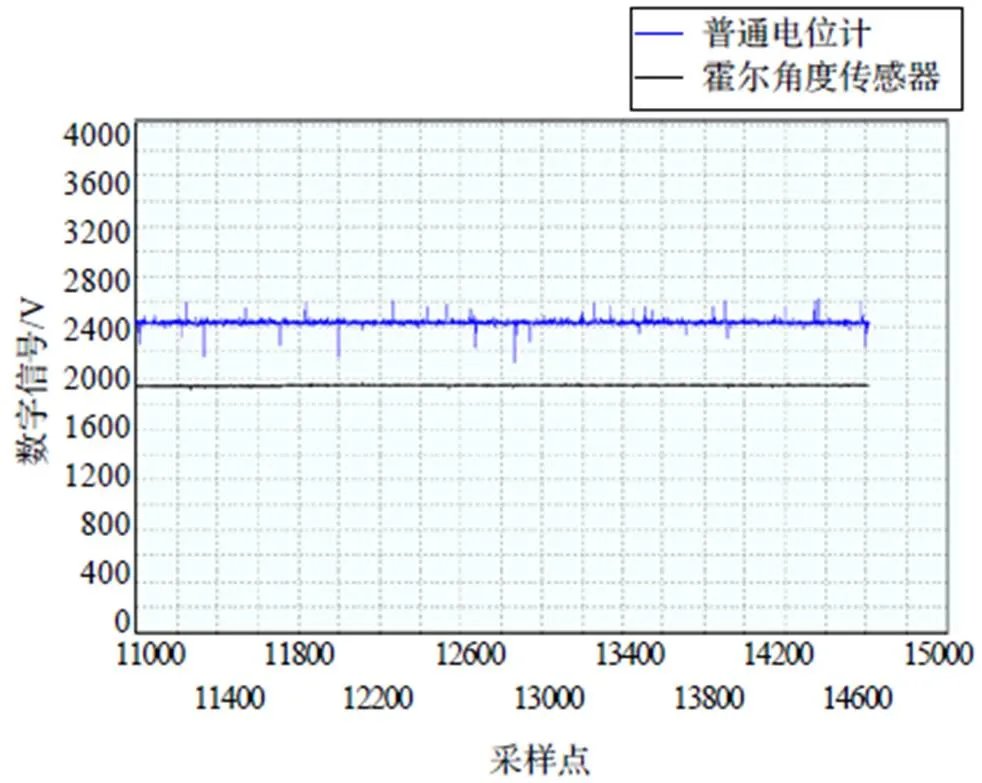
圖11 普通電位計與霍爾傳感器數據對比

圖12 霍爾傳感器測量采集
從圖中知,本次標定的霍爾角度傳感器比普通電位計數據波動小,同時數據呈線性變化,滿足操縱桿擺動要求,在檢測操縱桿擺動角度中可以替代普通電位計,具有體積小、適應性強的優點,可用于多種測量場合,同時減少機械磨損帶來的輸出特性影響,從而實現非接觸式角度傳感器的測量定位。
[1]王恒升,何清華. 基于智能傳感器的控制手柄設計[J]. 傳感技術學報,2004,17(4):541-546.
[2]鄒梅,王培元,張華. 基于3D霍爾傳感的搖桿手柄系統設計[J]. 科學技術創新,2019(35):40-42.
[3]汪浩宇,韓嘉驊. MLX90393的霍爾效應空間角位移傳感器設計[J]. 單片機與嵌入式系統應用,2020,20(4):63-67.
[4]黃曉群. 多用途非接觸式精密旋轉傳感器設計[D]. 廣州:華南理工大學,2018.
[5]楊星,張家祺,王晶,等. 全角度無接觸式智能角度傳感器設計與驗證[J]. 計算機工程與設計,2016,37(1):71-75,194.
[6]杜宇軒,魏榕山. 一種新型3D霍爾搖桿及機械臂系統設計[J]. 傳感器與微系統,2020,39(3):102-105.
[7]孟志華,馬世偉,朱偉. 基于3D Hall傳感器的SBW擋位采集系統優化設計[J]. 電子測量技術,2011,34(1):82-85,118.
[8]趙建飛.基于霍爾效應的剎車踏板角度傳感器設計與標定[D].江蘇:蘇州大學,2018.
[9]王永虹,徐煒,郝立平. STM32系列ARM Cortex-M3微控制器原理與實踐[M]. 北京:北京航空航天大學出版社,2008.
[10]崔玉鳳,蔡立娟,王彩霞,等. STM32與虛擬儀器串口通信的研究[J]. 信息通信,2015(12):207-208.
Design of Angular Displacement Measuring Device for Joystick
LIU Chuang,HAN Jiahua,ZHANG Ningning,ZHAO Zhiyuan
( School of Mechanical Engineering, Sichuan University, Chengdu 610065, China )
In order to deal with the defects of mechanical wear caused by the joystick contact angle sensor, which affects the output characteristics, in this article, by using the latest magnetic sensor programmer TDK MSP V1.0 developed by TDK-Micronas as the software development platform, a non-contact angle Hall sensor based on HAL 3725 Hall chip is designed. Through the selection of the sensor chip, the construction of the sensor model and the calibration experiment platform, the design of the hardware circuit and the software process control of the sensor calibration by the programmer, the digital signal of the sensor is finally collected through the experimental test. The experimental results show that compared with the contact sensor, the signal fluctuation is smaller, more sensitive, and the mechanical wear is reduced, which leads to the design of the non-contact angle sensor.
joystick;HAL 37xy;non-contact;sensor calibration
TN98
A
10.3969/j.issn.1006-0316.2021.01.010
1006-0316 (2021) 01-0067-08
2020-06-04
機電裝置換擋操縱桿(操縱手柄)和車輛電子控制器、傳感器技術開發項目(19H0533)
劉闖(1993-),男,遼寧鞍山人,碩士研究生,主要研究方向為機電控制、嵌入式軟硬件開發,E-mail:305227861@qq.com;韓嘉驊(1974-),男,山西大同人,副教授,主要研究方向為機電一體化、嵌入式軟硬件開發。
猜你喜歡
當代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
藝術啟蒙(2018年7期)2018-08-23 09:14:18
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
